Изобретение относится к медицинской технике, а более конкретно к области механотерапии суставов конечностей, и может быть использовано для укрепления мышц нижних конечностей путем разработки движений в их суставах в период реабилитации после травм и при устранении последствий оперативного вмешательства. Установление предшествующего уровня медтехники.
Известно устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией [1], содержащее П-образную тягу регулируемой длины, шарнирно соединенную с подстопником, оснащенным элементами крепления и упорами, выполненными с возможностью вхождения в механический контакт с П-образной тягой при ее повороте относительно ложемента голени. При этом на П-образной тяге закреплен с возможностью перемещения в двух взаимно перпендикулярных направлениях и фиксации упор в виде перекладины, причем ролики своими поверхностями качения установлены на направляющих.
Известно также устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией [2], содержащее:
- полый корпус с продольной прорезью, внутри которого размещен механизм нагружения, выполненный в виде пантографа и снабженный нагрузочным элементом (тарированной пружиной), неподвижным и подвижными шарнирами, один из которых выполнен двухосным и выступающим через прорезь крышки наружу;
- подстопник с элементами крепления, шарнирно соединенными с двухосным шарниром.
Основным недостатком данных устройств является узкая область применения, связанная с отсутствием современных механических и/или электрических приводов для активного перемещения нижней конечности.
Известны устройства для разработки суставов нижних конечностей механотерапией [3, 4], содержащие станину с реверсивным электроприводом и коробкой передач, кривошипно-шатунный механизм с регулируемой длиной кривошипа и механизм воздействия на конечность.
Недостаток таких устройств заключается в сложности их настройки для выполнения процедур механотерапии.
Известно также устройство для восстановления подвижности суставов механотерапией [5], содержащее электропривод, управляющую систему, опорные подвижные и неподвижные приспособления для смежных сегментов, причем электропривод выполнен в виде П-образной рамы, образованной в средней части опорным модулем и размещенным на нем неподвижным опорным приспособлением, а также два выходных вала, расположенных сосно на концах рамы и связанных с подвижным опорным приспособлением посредством механизма передачи вращения между двумя несоосными валами.
Недостаток - сложность конструкции и его настройки, управления ее работой, а также его размещение и снятие с ноги пациента. Характеристика и критика прототипа.
Наиболее близким изобретением к предлагаемому по наибольшему количеству сходных признаков, технической сущности, схемному решению и достигаемому при использовании результату является устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией, описанное в [6].
Такое устройство, выбранное в качестве прототипа, содержит:
- полое неподвижное основание с продольной прорезью в его верхней поверхности;
размещенные внутри полого основания:
- реверсивный электропривод;
- микроконтроллер;
- узел управления реверсивным электроприводом, вход которого соединен с выходом микроконтроллера, а выход - с электрическим входом реверсивного электропривода;
- панель управления, подключенная к входам микроконтроллера и содержащая кнопки установки параметров механотерапии;
- винтовую пару, состоящую из ходового винта и гайки;
- направляющую, установленную вдоль продольной прорези полого основания;
- каретку, кинематически связанную с гайкой винтовой пары и снабженную толкателем, пропущенным через прорезь полого основания;
- средство передачи вращения, обеспечивающее механическую связь реверсивного электропривода с ходовым винтом и выполненное в виде муфты размыкания;
а также размещенные на полом основании:
- трансмиссию, выполненную в виде двух параллельно расположенных четырехзвенных механизмов, состоящих из первого, второго, третьего и четвертого пар звеньев;
- раму, жестко связанную с трансмиссией;
- подстопник, установленный шарнирно на первом звене трансмиссии и снабженный элементами крепления стопы;
- ложементы голени и бедра, концы которых закреплены соответственно на первых и третьих звеньях трансмиссии;
- и датчик угла сгиба, закрепленный соосно с шарниром, установленным между первым и третьим звеньями трансмиссии и с электрическим выходом, подключенным ко входу микроконтроллера;
- при этом пульт экстренного отключения выполнен выносным и электрически соединен с входом микроконтроллера.
Основные недостатки такого устройства:
а) имеет место трение скольжения между кареткой и направляющей, что резко повышает нагрузку на электропривод.
Кроме того, у прототипа рама «давит» через каретку непосредственно на гайку, что ухудшает условия работы винтовой пары.
б) средство передачи вращения выполнено в виде муфты размыкания, что не позволяет оперативно менять коэффициент передачи такого средства.
Кроме того, имеет место высокий уровень передачи вибрационных колебаний от винтовой пары к электроприводу и обратно.
в) в полое основание прототипа через его продольную прорезь вовнутрь могут попадать посторонние предметы, что может привести к травмам.
Требуется устранить указанные недостатки.
Медико-технический результат и его достижение.
Изобретение направлено на решение таких задач как:
- снижение нагрузки на электропривод и винтовую пару;
- снижение уровня передачи вибрационных колебаний от электропривода на винтовую пару и обратно;
- улучшение условий работы с панелью управления, повышение оперативности при необходимости экстренного отключения работы устройства;
- повышение безопасности при работе с устройством;
- обеспечение удобства эксплуатации;
- увеличение количества используемых лечебных программ.
Достижение указанных результатов обеспечивается тем, что известное устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией, содержащее:
- полое неподвижное основание с продольной прорезью в его верхней поверхности;
- размещенные внутри полого основания:
- реверсивный электропривод;
- микроконтроллер;
- узел управления реверсивным электроприводом, вход которого соединен с выходом микроконтроллера, а выход - с электрическим входом реверсивного электропривода;
- панель управления, подключенная к входам микроконтроллера и содержащая кнопки установки параметров механотерапии;
- винтовую пару, состоящую из ходового винта и гайки;
- направляющую, установленную вдоль продольной прорези полого основания;
- каретку, кинематически связанную с гайкой винтовой пары и снабженную толкателем, пропущенным через прорезь полого основания;
- средство передачи вращения, обеспечивающее механическую связь реверсивного электропривода с ходовым винтом;
- а также размещенные на полом основании:
- трансмиссию, выполненную в виде двух параллельно расположенных четырехзвенных механизмов, состоящих из первого, второго, третьего и четвертого пар звеньев;
- раму, жестко связанную с трансмиссией;
- подстопник, снабженный элементами крепления стопы;
- ложементы голени и бедра, концы которых закреплены соответственно на первых и третьих звеньях трансмиссии;
- и датчик угла сгиба, закрепленный соосно с шарниром, установленным между первым и третьим звеньями трансмиссии и с электрическим выходом, подключенным ко входу микроконтроллера;
- при этом пульт экстренного отключения выполнен выносным и также электрически соединен с входом микроконтроллера;
содержит также:
- средство передачи вращения, выполненное в виде двух кинематически связанных друг с другом через зубчатый ремень шкивов, один из которых насажен на вал реверсивного электропривода, а другой - на ходовой винт винтовой пары;
- направляющую, выполненную в виде пары рельсов, размещенных на основании по разные стороны от ходового винта винтовой пары;
- каретку, выполненную С-образной, концы которой снабжены жестко соединенными с ними полуосями, на которых размещены ролики, выполненные с возможностью перемещения (прокатывания) по указанным рельсам;
- панель управления, также выполненную выносным, а пульт экстренного отключения выполнен в виде кнопки, конструктивно размещенной на панели управления и с габаритными размерами, превышающими габаритные размеры остальных кнопок панели управления;
- при этом трансмиссия снабжена скобой, на которой размещен подстопник.
Кроме того,
- продольная прорезь основания снабжена силиконовым (профилированным) уплотнителем;
- подстопник снабжен горизонтальным упором для размещения пятки нижней конечности, выполненным с анатомической выемкой;
- микроконтроллер имеет разъем для Flash-карты и снабжен звуковым сигнализатором;
- гнездо для размещения панели управления закреплено на шарнире между первым и третьим звеньями трансмиссии.
Заявителем не обнаружены устройства, в которых указанный медико-технический результат достигается аналогичной совокупностью существенных признаков. При этом проведенный заявителем анализ уровня техники, включающий поиск по патентным и другим научно-техническим и медико-техническим источникам информации и выявление источников, содержащих сведения об аналогах изобретения, позволили установить, что не имеются аналоги, характеризующиеся признаками, идентичными всем существенным признакам изобретения, а выделение из перечня аналогов прототипа [6] обеспечило выявление совокупности существенных по отношению к техническому результату отличительных признаков заявленного изобретения.
Другими словами, по имеющимся у заявителя сведениям аналоги, характеризующиеся совокупностями признаков, тождественными всем признакам заявленного устройства, отсутствуют.
Указанные признаки являются существенными и взаимосвязаны с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого медико-технического результата.
Заявителем проведена также проверка соответствия указанной совокупности существенных признаков устройства трем условиям (критериям) патентоспособности. Соответствие заявляемого устройства условию патентоспособности «новизна».
Для оценки новизны заявляемого технического решения проанализирована вышеприведенная совокупность существенных признаков заявляемого устройства. Для этого выделены те его признаки, которые совпадают с признаками прототипа, а именно, устройство содержит:
- полое неподвижное основание с продольной прорезью в его верхней поверхности;
- размещенные внутри полого основания:
- реверсивный электропривод;
- микроконтроллер;
- узел управления реверсивным электроприводом, вход которого соединен с выходом микроконтроллера, а выход - с электрическим входом реверсивного электропривода,
- панель управления, подключенная к входам микроконтроллера, и содержащая кнопки установки параметров механотерапии;
- винтовую пару, состоящую из ходового винта и гайки;
- направляющую, установленную вдоль продольной прорези полого основания;
- каретку, кинематически связанную с гайкой винтовой пары и снабженную толкателем, пропущенным через прорезь полого основания;
- средство передачи вращения, обеспечивающее механическую связь реверсивного электропривода с ходовым винтом;
- а также размещенные на полом основании:
- трансмиссию, выполненную в виде двух параллельно расположенных четырехзвенных механизмов, состоящих из первого, второго, третьего и четвертого пар звеньев;
- раму, жестко связанную с трансмиссией;
- подстопник, снабженный элементами крепления стопы;
- ложементы голени и бедра, концы которых закреплены соответственно на первых и третьих звеньях трансмиссии;
и датчик угла сгиба, закрепленный соосно с шарниром, установленным между первым и третьим звеньями трансмиссии и с электрическим выходом, подключенным ко входу микроконтроллера;
- при этом пульт экстренного отключения выполнен выносным и электрически соединен с входом микроконтроллера.
Теперь выделим те признаки, которые отличают заявляемое устройство от ближайшего аналога - прототипа: а именно, оно содержит:
- средство передачи вращения, выполненное в виде двух кинематически связанных друг с другом через зубчатый ремень шкивов, один из которых насажен на вал реверсивного электропривода, а другой - на ходовой винт винтовой пары;
- направляющую, выполненную в виде пары рельсов, размещенных на основании по разные стороны от ходового винта винтовой пары;
- каретку, выполненную С-образной, концы которой снабжены жестко соединенными с ними полуосями, на которых размещены ролики, выполненные с возможностью перемещения (прокатывания) по указанным рельсам;
- панель управления, также выполненную выносным, а пульт экстренного отключения выполнен в виде кнопки, конструктивно размещенной на панели управления и с габаритными размерами, превышающими габаритные размеры остальных кнопок панели управления;
- при этом трансмиссия снабжена скобой, на которой размещен подстопник.
Кроме того,
- продольная прорезь основания снабжена силиконовым (профилированным) уплотнителем;
- подстопник снабжен горизонтальным упором для размещения пятки нижней конечности, выполненным с анатомической выемкой;
- микроконтроллер имеет разъем для Flash-карты и снабжен звуковым сигнализатором.
- а гнездо для размещения панели управления закреплено на шарнире между первым и третьим трансмиссии.
Наличие указанных признаков обеспечивает соответствие всей совокупности существенных признаков условию патентоспособности «новизна». При этом не обнаружены устройства, в которых медико-технический результат достигнут аналогичной совокупностью существенных признаков.
По имеющимся у заявителя сведениям совокупность существенных признаков, характеризующих сущность заявленного изобретения, неизвестна, что позволяет сделать вывод о соответствии ее условию патентоспособности «новизна» по действующему законодательству.
Соответствие заявляемого устройства условию патентоспособности «изобретательский уровень».
Для проверки соответствия требованию изобретательского уровня заявителем проведен дополнительный поиск и анализ решений с целью выявления признаков, совпадающих с отличительными от выбранного прототипа, результаты которого показали, что заявленный объект явным образом не следует из известного уровня техники, определенного заявителем.
Другими словами, сравнение заявляемого устройства не только с прототипом, но и с другими техническими решениями в данной и смежных областях медицины и медицинской техники показало, что последние не содержат признаков, сходных с признаками, отличающими заявляемое устройство от прототипа.
Следовательно, заявляемый объект соответствует условию патентоспособности «изобретательский уровень» по действующему законодательству.
При этом следует отметить, что между совокупностью существенных признаков (отличительными признаками) настоящего изобретения и достигаемым медико-техническим результатом существует причинно-следственная связь, поскольку отличительные признаки не были выявлены ни в одном из аналогов, а достигаемый результат получается лишь при совместном использовании всех без исключения известных и отличительных признаков.
Таким образом, указанные признаки являются существенными и взаимосвязаны с образованием устойчивой совокупности существенных признаков, достаточной для получения требуемого медико-технического результата.
Настоящее изобретение поясняется конкретным примером исполнения, который, однако, не является единственно возможным, но наглядно демонстрирует возможность достижения требуемого технического результата.
Сущность изобретения иллюстрируется чертежами:
- на фиг. 1 показана упрощенная кинематическая схема устройства;
- на фиг. 2 показаны элементы и узлы устройства, размещенные внутри полого основания (вид сверху);
- на фиг. 3 показаны элементы и узлы устройства, размещенные внутри полого основании (вид сбоку);
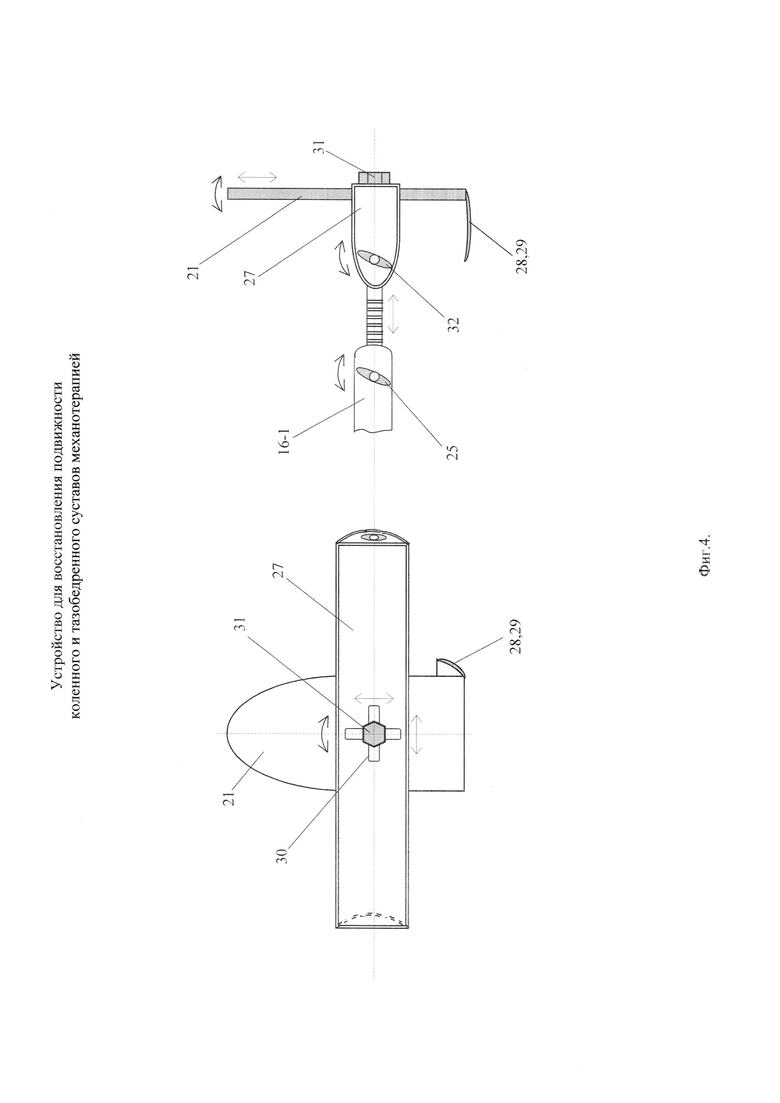
- на фиг. 4 показан подстопник устройства со скобой;
- на фиг. 5 показано размещение ноги пациента на ложементах устройства (упрошенная кинематическая схема);
- на фиг. 6 показано закрепление уплотнителя на прорези основания;
- на фиг. 7 показано изображение панели управления. Описание конструкции устройства (в статике).
Устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией содержит (фиг. 1-3):
- полое неподвижное основание 1 с продольной прорезью 2 в его верхней поверхности,
размещенные внутри полого основания 1:
- реверсивный электропривод 3,
- микроконтроллер 4,
- узел 5 управления реверсивным электроприводом, вход которого соединен с выходом микроконтроллера 4, а выход - с электрическим входом реверсивного электропривода 3,
- панель 6 управления, подключенная к входам микроконтроллера 4,
- винтовую пару, состоящую из ходового винта 7 и гайки 8,
- направляющую, установленную вдоль продольной прорези 2 полого основания 1 и выполненную в виде пары рельсов 9, размещенных на основании 1 по разные стороны от ходового винта 7,
- каретку 10, кинематически связанную с гайкой 8 винтовой пары и снабженную толкателем 11, пропущенным через прорезь 2 полого основания 1,
- средство передачи вращения, обеспечивающее механическую связь реверсивного электропривода 3 с ходовым винтом 7 и выполненное в виде двух кинематически связанных друг с другом через зубчатый ремень 12 шкивов 13 и 14, один из которых насажен на вал реверсивного электропривода 3, а другой - на ходовой винт 7, установленный на подшипниках 15;
а также размещенные на полом основании 1 (фиг. 1):
- трансмиссию, выполненную в виде двух параллельно расположенных четырехзвенных механизмов, состоящих из первых 16-1 и 16-2, вторых 17-1 и 17-2, третьих 18-1 и 18-2 и четвертых 19-1 и 19-2 пар звеньев;
- раму 20, жестко связанную с трансмиссией;
- подстопник 21, снабженный элементами крепления стопы (не показаны),
- ложементы голени 22 и бедра 23, концы которых закреплены соответственно на первых 16-1, 16-2 и третьих 18-1, 18-2 звеньях трансмиссии; и датчик 24 угла сгиба, закрепленный соосно с шарниром, установленным между первым 16-1 и третьим 18-1 звеньями трансмиссии и с электрическим выходом, подключенным ко входу микроконтроллера 4 (фиг. 1,2).
Пары звеньев 16-1, 16-2 и 17-1, 17-2 выполнены телескопическими (выдвижными) с регулируемой длиной звена. При регулировании их длины используются фиксирующие парные винты 25 и парные винты 26.
Трансмиссия (фиг. 1) содержит скобу 27, на которой размещен подстопник 21. В свою очередь, подстопник 21 снабжен горизонтальным упором 28 для размещения пятки нижней конечности пациента, выполненным с анатомической выемкой 29 (фиг. 4).
Скоба 27 имеет крестообразное отверстие 30, через которое пропущен фиксатор 31. Благодаря такой конструкции возможна регулировка положения скобы 27 в направлениях «вверх-вниз» и «вправо-влево», а также ее наклон вокруг оси фиксатора 31.
Ослабляя фиксаторы 32 можно менять также наклон скобы 27 вокруг их осей (фиг. 4).
В устройстве каретка 10 выполнена С-образной (фиг. 3), концы которой снабжены жестко соединенными с ними полуосями 33 и 34, на которых имеются ролики 35 и 36, выполненные с возможностью перемещения (прокатывания) по указанным выше рельсам 9.
Продольная прорезь 2 основания 1 снабжена силиконовым (профилированным) уплотнителем 37, состоящим из двух половинок 37-1 и 37-2 (фиг. 6, а). При этом на фиг. 6,6 дополнительно показан толкатель 11 каретки 10, «раздвигающий» во время движения в противоположные стороны упругие половинки 37-1 и 37-2.
Микроконтроллер 4 имеет разъем 38 для Flash-карты и снабжен звуковым сигнализатором 39 (фиг. 2).
Гнездо 40 для размещения панели 6 управления закреплено на шарнире между первым 16-2 и третьим 18-2 звеньями трансмиссии (фиг. 1).
Панель 6 управления выполнена выносным и снабжена кнопками установки параметров механотерапии и их индикации (фиг. 7):
41 и 42 - кнопки установки минимального и максимального значений угла сгиба;
43 и 44 - кнопки начальной установки угла сгиба и скорости изменения угла сгиба;
45 и 46 - кнопки установки выдержки при минимальном и максимальном значениях угла сгиба,
47- совокупность индикаторов текущего значения угла сгибания, заданной длительности процедуры, времени, оставшейся до конца процедуры и др.
Кроме того, панель 6 управления снабжена кнопкой 48 «Пуск», а выносной пульт устройства выполнен в виде кнопки 49 экстренного отключения, конструктивно размещенной на панели 6 управления и с габаритными размерами, превышающими габаритные размеры остальных кнопок панели 6 (фиг. 7).
В зависимости от особенностей используемой программы механотерапии количество различных функциональных кнопок панели 6 может быть разным.
На фиг. 5 поз. 50 - мнимая (условная) ось коленного сустава пациента. Назначение и функции конструктивных элементов и узлов устройства.
Полое неподвижное основание 1 является главным несущим и связующим конструктивным элементом устройства, основное назначение которого заключается обеспечение его жесткости и устойчивости при выполнении лечебных процедур, а также защита его внутренних узлов от механических повреждений.
Трансмиссия размещена на верхней поверхности основания 1 и обеспечивает непосредственное механо-терапевтическое воздействие на нижнюю конечность пациента. Она состоит из двух параллельных кинематических цепей, образованных каждая из шарнирно соединенных звеньев. Другими словами, трансмиссия - это два связанных и параллельно расположенных четырехзвенных механизма.
Микроконтроллер 4 - контрольно-управляющий блок устройства. Он предназначен для принятия сигналов с других элементов и узлов устройства, их соответствующей обработки с помощью записанной программы и выдачи управляющих сигналов на другие узлы.
Узел 5 управления предназначен для формирования сигналов, управляющих работой электропривода 3.
Панель 6 управления предназначена для формирования и хранения программы работы устройства.
Работа описываемого устройства основана на функционировании преобразователя «вращение - поступательное перемещение». При этом винтовая пара, состоящая из ходового винта 7 и гайки 8, обеспечивает преобразование вращательного движения вала электропривода 5 в продольное поступательное перемещение каретки 10.
Подстопник 21 предназначен для размещения и фиксации стопы пациента во время выполнения лечебной процедуры.
Ложементы голени 22 и бедра 23, концы которых закреплены на звеньях трансмиссии, предназначены для размещения нижней конечности пациента во время выполнения необходимых лечебных процедур.
Датчик 24 угла сгиба предназначен для преобразования взаимно-углового смещения первого 16-1 и третьего 18-1 звеньев в соответствующие электрические сигналы. В качестве датчика 24 угла сгиба может быть использован, например, прецизонный потенциометрический датчик сопротивления (переменный резистор), величина сопротивления которого пропорционально углу сгиба коленного сустава.
Звуковой сигнализатор 39 предназначен для звукового информирования пациента и обслуживающего медработника о работе описываемого устройства. В частности, он формирует звуковые сигналы:
- при запуске устройства;
- при возникновении аварийной ситуации;
- при завершении программы механотерапии,
- а также другие предупредительные сигналы.
Кнопка 49 экстренного отключения может быть использования в качестве аварийной кнопки, кнопки «Останов» и др. Описание работы устройства (в динамике).
а) подготовка устройства к процедурам.
Перед началом работы устройство должно быть установлено на ровной горизонтальной поверхности. При этом необходимо обратить особое внимание на то, чтобы в его подвижные узлы не могли попасть части тела пациента и посторонние предметы (одеяла, подушки, кабели и т.п.).
б) самотестирование электропривода и датчика угла (без пациента).
Перед началом терапии необходимо протестировать работу устройства в течение нескольких циклов без пациента. Для этого запускают программу самотестирования электропривода 3 и датчика 24 угла. Произойдет перемещение трансмиссии вместе рамой 20 на некоторое расстояние (угол) сначала в одну сторону, а затем в противоположную.
Если датчик 24 при этом не изменил своих показаний или они изменились неправильно, устройство выдает предупредительный сигнал и на индикаторах 47 появляется сообщение «Устройство не готово к работе».
В случае правильного функционирования устройства оно формирует на индикаторах 47 сообщение «Устройство готово к работе».
в) подготовка пациента к процедурам.
Желательно, чтобы перед процедурами пациент был одет в облегченный спортивный костюм. Необходимо также, чтобы перед процедурой пациент находился в анатомически правильном положении. Для этого требуется, проверить следующие параметры настройки и позиционирования, т.е. выполнить анатомическую регулировку устройства:
- измерить длину бедра, в соответствии с которым, используя фиксаторы 26, установить необходимую длину звеньев 17-1 и 17-2;
- измерить длину голени, на основе которого, используя фиксаторы 25, установить необходимую длину звенев 16-1 и 16-2;
- используя фиксаторы 25, 31 и 32, выполнить необходимую настройку подстопника 21;
- проверить совпадение мнимой оси 50 коленного сустава и соответствующей оси шарнира между первым 16-2 и третьим 18-2 и звеньями трансмиссии.
Ознакомить пациента с назначением кнопок панели 6 управления.
г) самотестирование электропривода 3 и датчика 24 угла (с пациентом).
После этого следует вновь запустить указанную выше программу тестирования работы устройства (уже с пациентом), обратив особое внимание на безболезненность движений в его суставах.
д) выполнение основной лечебной процедуры.
Перед запуском основной лечебной процедуры, в зависимости от заболевания и состояния пациента лечащий врач определяет методику и режим и лечебного (механо-терапевтического) воздействия на коленные и тазобедренные суставы ног пациента с помощью данного устройства. С помощью панели он 6 вводит в устройство соответствующие параметры механотерапии.
С нажатием кнопки «Пуск» (что сопровождается звуковым сигналом) запускается реверсивный электропривод 3 и вращение его вала через средство передачи вращения передается винту 7 винтовой пары. В результате ее гайка 8 начинает поступательно перемещаться на роликах 35 и 36 по рельсам 9, толкая при этом каретку 10 с толкателем 11. Последний, в свою очередь, передает усилие движения на раму 20. Перемещение рамы 20 вызывает движение четырехзвенного механизма трансмиссии и, соответственно, бедра пациента, прикрепленного ложементами 22 и 23 к звеньям 16 и 18.
При этом информация о текущем значении угла сгиба с датчика 24 поступает на вход микроконтроллера 4 в виде напряжения. Эта информация сравнивается с заданными параметрами механотерапии. Результаты сравнения через узел 5 в виде управляющих электрических сигналов поступают на электропривод 3.
Наличие в выносной панели 6 кнопки 49 экстренного отключения позволяет медработнику или пациенту оперативно остановить работу электропривода 3.
Завершение лечебной программы заканчивается звуковым сигналом сигнализатора 39.
Послепроиедурные мероприятия.
Послепроцедурные мероприятия проводятся под руководством медработника и могут включать в себя водные и воздушные процедуры, фитотерапию и др., которые завершаются послепроцедурным покоем. Выводы.
Таким образом, предложенная совокупность существенных признаков устройства позволяет достичь следующих результатов:
а) у прототипа между кареткой и направляющей имеет место трение скольжения.
В заявляемом устройстве при перемещении каретки 10 происходит прокатывание роликов 35 и 36 по рельсам 9, т.е. имеет место замена «трения скольжения» на «трение качения», что существенно снижает нагрузку на электропривод 3.
Кроме того, если у прототипа рама 20 «давит» через каретку 10 непосредственно на гайку 8, то в заявляемом устройстве такое «давление» распределяется между концами каретки 10 и воздействие рамы 20 на гайку 8 оказывается относительно малым (меньшим), что облегчает работу винтовой пары.
б) у прототипа средство передачи вращения, обеспечивающее механическую связь реверсивного электропривода 3 с ходовым винтом 7, выполнено в виде муфты размыкания.
В заявляемом устройстве средство передачи вращения реализовано в виде двух кинематически связанных друг с другом через зубчатый ремень 12 шкивов 13 и 14, один из которых насажен на ходовой винт 7, а другой - на вал реверсивного электропривода 3. Благодаря такому выполнению средства передачи обеспечивается (достигается) снижение передачи вибрации от винта 7 к электроприводу 8 и наоборот.
Кроме того, в заявляемом устройстве возможно относительно просто изменить коэффициент передачи от вала электропривода к ходовому винту 7. Для этого достаточно изменить диаметры используемых шкивов 13 и 14.
в) в заявляемом устройстве благодаря тому, что панель 6 управления также выполнена выносным, а пульт экстренного отключения реализован в виде кнопки 49, конструктивно размещенной на панели 6, обеспечивается «приближение» панели управления к пациенту. Последний может одной рукой держать панель 6 за ее корпус в удобном ему расстоянии от себя, при этом пальцами этой же руки может также нажимать на кнопки панели 6.
Кроме того, благодаря тому, что у кнопки 49 экстренного отключения габаритные размеры выполнены превышающими габаритные размеры остальных кнопок панели управления, ускоряется, при необходимости, ее поиск и нажатие.
г) в заявляемом устройстве благодаря тому, что продольная прорезь 2 основания 1 снабжена силиконовым (профилированным) уплотнителем 37, снижается риск попадания туда участков тела пациента и посторонних предметов (одеяла, подушки, кабели и т.п.);
д) в заявляемом устройстве благодаря тому, что подстопник 21 снабжен горизонтальным упором 28 для размещения пятки, выполненным с анатомической выемкой 29, обеспечивается более устойчивое и удобное размещение пятки пациента на подстопнике 21;
е) в заявляемом устройстве благодаря тому, что микроконтроллер 4 снабжен разъемом 38 для Flash-карты, появляется возможность записи результатов процедуры в соответствующую Flash-карту, а также считывать с нее дополнительные лечебные программы по восстановлению подвижности коленного и тазобедренного суставов.
Устройство может быть использовано для левой и правой ноги без переналадки. Оно является механотерапевтическим аппаратом, предназначенным для непрерывной пассивной разработки коленного и тазобедренного суставов.
По мнению заявителя, указанные выше достоинства устройства могут быть использованы, в конечном счете, для достижения следующих терапевтических целей:
- улучшение обмена веществ в суставе;
- предупреждение тугоподвижности сустава;
- поддержка восстановления и заживления хрящевых зон и поврежденных связках;
- убыстрение рассасывания выпотов;
- улучшение циркуляции крови и лимфы;
- профилактика тромбозов и эмболии;
- для лечения наиболее частых повреждений коленного и тазобедренного суставов, послеоперационных состояний и заболеваний суставов, последствий оперативного вмешательства;
- лечение растяжений и ушибов суставов, восстановление работоспособности суставов. Соответствие заявляемого устройства условию патентоспособности «промышленная применимость».
По мнению заявителя сведения, приведенные в описании, достаточны для его осуществления. Такое устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией не вызывает затруднений при его изготовлении, а возможность промышленного изготовления заявляемого технического решения подтверждается, например, успешным изготовлением авторами нескольких различных вариантов его реализации.
Вышеизложенные сведения свидетельствуют для заявленного изобретения, как оно охарактеризовано в формуле, о возможности его осуществления с помощью известных и предложенных методов и средств.
Указанное позволяет также сделать вывод о соответствии изобретения условию патентоспособности «промышленная применимость» по действующему законодательству.
Таким образом, заявляемое устройство отвечает требуемым условиям патентоспособности и обладает значительными преимуществами по сравнению с известными аналогами.
Источники информации
1. Патент РФ №2085173 на изобретение «Устройство для разработки нижних конечностей по кл. А61Н 1/02. Публ. 27.07.1997 г.
2. Патент РФ №2102056 на изобретение «Устройство для разработки движений нижней конечности» по кл. А61Н 1/02. Публ. 20.01.1998 г.
3. Патент РФ №640740 на изобретение «Устройство для разработки подвижности в суставах нижних конечностей» по кл. А 61Н 1/02. 1978 г. Публ. 05.01.1979 г.
4. Авт. свид. СССР №848027 на изобретение «Электромеханическое устройство для разработки суставов нижних конечностей» по кл. А61Н 1/02. Публ. 23.07.1981 г.
5. Патент РФ №2139701 на изобретение «Устройство для восстановления подвижности в суставах» по кл. А61Н 1/02. Публ. 20.10.1999 г.
6. Патент РФ №2307638 на изобретение «Аппарат для восстановления подвижности коленного и тазобедренного суставов человека» по кл. А61Н 1/02. Публ. 27.05.2007 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2005 |
|
RU2307638C2 |
| Аппарат для биосинхронизированной механотерапии нижних конечностей | 2018 |
|
RU2698853C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ РАБОТОСПОСОБНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2004 |
|
RU2281077C1 |
| Механотерапевтическое устройство для разработки подвижности голеностопных суставов | 2017 |
|
RU2658760C1 |
| Комплекс роботизированный медицинский для реабилитации нижних конечностей и механотренажер реабилитационного комплекса для нижних конечностей | 2022 |
|
RU2820327C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНОТЕРАПИИ ПОЗВОНОЧНИКА | 2009 |
|
RU2407505C1 |
| Тренажерный комплекс для функциональной терапии нижних конечностей и способ его применения | 2017 |
|
RU2678916C1 |
| Устройство для механотерапии позвоночника | 2015 |
|
RU2612842C1 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ В СУСТАВАХ | 1998 |
|
RU2139701C1 |
| МЕХАНОТЕРАПЕВТИЧЕСКАЯ УСТАНОВКА ДЛЯ МАССАЖА И ГРАВИТАЦИОННОГО ВЫТЯЖЕНИЯ ПОЗВОНОЧНИКА | 2012 |
|
RU2512959C1 |





Изобретение относится к медицинской технике, а более конкретно, к области механотерапии суставов конечностей и может быть использовано для укрепления мышц нижних конечностей путем разработки движений в их суставах в период реабилитации после травм и при устранении последствий оперативного вмешательства. Устройство содержит полое неподвижное основание с продольной прорезью в его верхней поверхности, размещенные внутри полого основания: реверсивный электропривод, микроконтроллер, узел управления реверсивным электроприводом, вход которого соединен с выходом микроконтроллера, а выход - с электрическим входом реверсивного электропривода, панель управления, подключенную к входам микроконтроллера и содержащую кнопки установки параметров механотерапии, винтовую пару, состоящую из ходового винта и гайки, направляющую, установленную вдоль продольной прорези полого основания, каретку кинематически связанную с гайкой винтовой пары и снабженную толкателем, пропущенным через прорезь полого основания, средство передачи вращения, обеспечивающее механическую связь реверсивного электропривода с ходовым винтом. На полом основании также размещены трансмиссия, выполненная в виде двух параллельно расположенных четырехзвенных механизмов, состоящих из первого, второго, третьего и четвертого пар звеньев, рама, жестко связанная с трансмиссией, подстопник, снабженный элементами крепления стопы, ложементы голени и бедра, концы которых закреплены соответственно на первых и третьих звеньях трансмиссии, и датчик угла сгиба, закрепленный соосно с шарниром, установленным между первым и третьим звеньями трансмиссии и с электрическим выходом, подключенным ко входу микроконтроллера. Пульт экстренного отключения выполнен выносным и также электрически соединен с входом микроконтроллера. Устройство содержит также средство передачи вращения, выполненное в виде двух кинематически связанных друг с другом через зубчатый ремень шкивов, один из которых насажен на вал реверсивного электропривода, а другой - на ходовой винт винтовой пары, и направляющую, выполненную в виде пары рельсов, размещенных на основании по разные стороны от ходового винта винтовой пары. Изобретение обеспечивает снижение нагрузки на электропривод и винтовую пару, уровня передачи вибрационных колебаний от электропривода на винтовую пару и обратно, улучшение условий работы с панелью управления, повышение оперативности при необходимости экстренного отключения работы устройства, повышение безопасности при работе с устройством. 4 з.п. ф-лы, 7 ил.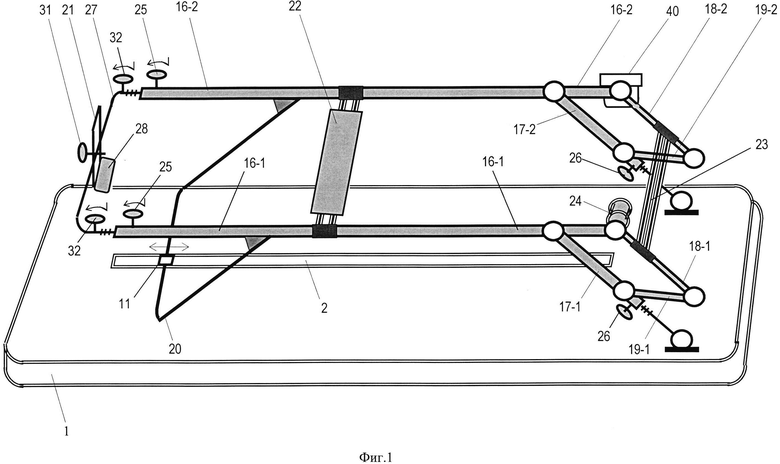
1. Устройство для восстановления подвижности коленного и тазобедренного суставов механотерапией, содержащее:
- полое неподвижное основание с продольной прорезью в его верхней поверхности,
размещенные внутри полого основания:
- реверсивный электропривод;
- микроконтроллер;
- узел управления реверсивным электроприводом, вход которого соединен с выходом микроконтроллера, а выход - с электрическим входом реверсивного электропривода,
- панель управления, подключенную к входам микроконтроллера и содержащую кнопки установки параметров механотерапии;
- винтовую пару, состоящую из ходового винта и гайки;
- направляющую, установленную вдоль продольной прорези полого основания;
- каретку, кинематически связанную с гайкой винтовой пары и снабженную толкателем, пропущенным через прорезь полого основания;
- средство передачи вращения, обеспечивающее механическую связь реверсивного электропривода с ходовым винтом;
а также размещенные на полом основании:
- трансмиссию, выполненную в виде двух параллельно расположенных четырехзвенных механизмов, состоящих из первого, второго, третьего и четвертого пар звеньев;
- раму, жестко связанную с трансмиссией;
- подстопник, снабженный элементами крепления стопы;
- ложементы голени и бедра, концы которых закреплены соответственно на первых и третьих звеньях трансмиссии;
- и датчик угла сгиба, закрепленный соосно с шарниром, установленным между первым и третьим звеньями трансмиссии и с электрическим выходом, подключенным ко входу микроконтроллера;
- при этом пульт экстренного отключения выполнен выносным и электрически соединен с входом микроконтроллера;
отличающееся тем, что
- средство передачи вращения выполнено в виде двух кинематически связанных друг с другом через зубчатый ремень шкивов, один из которых насажен на вал реверсивного электропривода, а другой - на ходовой винт винтовой пары;
- направляющая выполнена в виде пары рельсов, размещенных на основании по разные стороны от ходового винта винтовой пары;
- каретка выполнена С-образной, концы которой снабжены жестко соединенными с ними полуосями, на которых размещены ролики, выполненные с возможностью перемещения (прокатывания) по указанным рельсам;
- панель управления также выполнена выносной, а пульт экстренного отключения выполнен в виде кнопки, конструктивно размещенной на панели управления и с габаритными размерами, превышающими габаритные размеры остальных кнопок панели управления;
- при этом трансмиссия снабжена скобой, на которой размещен подстопник.
2. Устройство по п. 1, отличающееся тем, что продольная прорезь основания снабжена силиконовым (профилированным) уплотнителем.
3. Устройство по п. 1, отличающееся тем, что подстопник снабжен горизонтальным упором для размещения пятки нижней конечности, выполненным с анатомической выемкой.
4. Устройство по п. 1, отличающееся тем, что микроконтроллер имеет разъем для Flash-карты и снабжен звуковым сигнализатором.
5. Устройство по п. 1, отличающееся тем, что гнездо для размещения панели управления закреплено на шарнире между первым и третьим звеньями трансмиссии.
| АППАРАТ ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ КОЛЕННОГО И ТАЗОБЕДРЕННОГО СУСТАВОВ ЧЕЛОВЕКА | 2005 |
|
RU2307638C2 |
| УСТРОЙСТВО ДЛЯ ВОССТАНОВЛЕНИЯ ПОДВИЖНОСТИ В СУСТАВАХ | 1998 |
|
RU2139701C1 |
| RU 2000766 C1, 15.10.1993 | |||
| Акселерометр | 1975 |
|
SU535513A1 |
| JP 6105877 A, 19.04.1994 | |||
| US 6685658 B1, 03.02.2004 | |||
| US 20120046578 A1, 23.02.2012. | |||

