Изобретение относится к области судостроения и касается конструирования надводно-подводного аппарата с изменяемой геометрией формы корпуса.
Известно высокоскоростное надводно-подводное судно (патент US №9327811 B2, МПК: B63B 1/30, B63G 13/00, B63B 1/32), которое выполнено в виде командного модуля, соединенного с двумя цилиндрическими подводными крыльями при помощи двух плоских стоек. Причем плоские стойки жестко соединены с цилиндрическими подводными крыльями, а с командным модулем имеют подвижное соединение. Движение этого судна обеспечивается тянущими винтовыми движителями, установленными в носовой оконечности цилиндрических подводных крыльев, а высокая скорость хода достигается за счет создания воздушного суперкавитационного потока воды вокруг цилиндрических подводных крыльев.
Высокоскоростное надводно-подводное судно по патенту US №9327811 B2 принято за прототип.
Указанное известное изобретение обладает рядом недостатком, а именно: воздушный суперкавитационный поток воды вокруг цилиндрических подводных крыльев приведет к значительному уменьшению плавучести такого надводно-подводного судна; при боковой волне в надводном положении у него может появиться относительно большая бортовая качка; как в надводном, так и в подводном положении этот судно в основном управляется в горизонтальной плоскости за счет разной скорости вращения тянущих носовых винтовых движителей, что приводит к дополнительному расходу энергии при его движении; независимо от надводного или подводного положения при отказе работы одного из движителей это судно становится практически неуправляемым в горизонтальной плоскости; отсутствие рулей глубины также приведет к дополнительному расходу энергии при движении в подводном положении.
Целью предлагаемого изобретения является повышение гидродинамических, эксплуатационных характеристик, надежности и управляемости на всех режимах движения.
Цель достигается тем, что предложенный надводно-подводный аппарат с изменяемой геометрией формы корпуса, согласно изобретению, содержит центральный подводный торпедообразный корпус, два боковых подводных торпедообразных корпуса, центральный вертикальный хорошо обтекаемый корпус крыльевого типа, два боковых корпуса крыльевого типа и верхний хорошо обтекаемый корпус также крыльевого типа. Движение этого надводно-подводного аппарата обеспечивается тремя водометными движителями насосного типа, установленными в кормовых оконечностях всех трех подводных торпедообразных корпусов. Центральный вертикальный корпус крыльевого типа имеет жесткое соединение с центральным подводным торпедообразным корпусом и с верхним корпусом крыльевого типа. Каждый боковой корпус крыльевого типа жестко соединен с соответствующим боковым подводным торпедообразным корпусом и имеет подвижное соединение с верхним корпусом. Для обеспечения управляемости все корпусы крыльевого типа (центральный, два боковых и верхний) в кормовых оконечностях оснащены рулями.
Предлагаемое изобретение поясняется на фиг. 1-5, где:
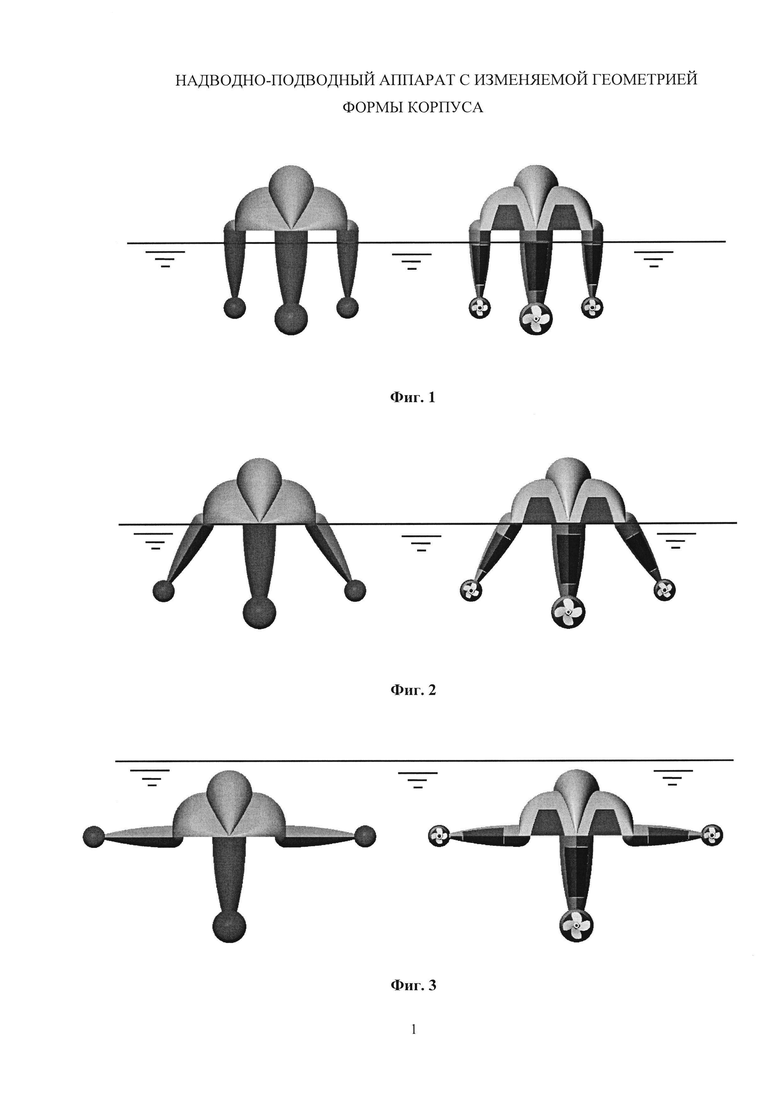
фиг. 1 - вариант движение надводно-подводного аппарата в надводном положении в режиме «тримарана»;
фиг. 2 - вариант движение надводно-подводного аппарата в надводном положении в полупогруженном режиме;
фиг. 3 - вариант движение надводно-подводного аппарата в подводном положении;
фиг. 4 - изометрическая проекция надводно-подводного аппарата в варианте движения под водой;
фиг. 5 - вид сбоку надводно-подводного аппарата в варианте движения под водой.
Надводно-подводный аппарат содержит центральный подводный торпедообразный корпус 1, два боковых подводных торпедообразных корпуса 2, центральный вертикальный хорошо обтекаемый корпус 3 крыльевого типа, два боковых корпуса 6 крыльевого типа и верхний хорошо обтекаемый корпус 5 также крыльевого типа. В кормовых оконечностях всех трех подводных торпедообразных корпусов установлены водометные движители насосного типа 7. Все корпусы крыльевого типа (центральный, два боковых и верхний) в кормовых оконечностях оснащены рулями 4.
На фиг. 1-3 показаны возможные режимы движения надводно-подводного аппарата с изменяемой геометрией формы корпуса.
На тихой воде и при небольшом волнении он может перемещаться в «тримаранном» режиме движения (фиг. 1). При тех же погодных условиях может перемещаться в полупогруженном режиме движения (фиг. 2). При большом волнении или штормовой погоде, а также в условиях сложной ледовой обстановки может двигаться под водой (фиг. 3).
Как в подводном, так и в надводном положении при отказе работы любого из трех движителей предложенный надводно-подводный аппарат может при помощи оставшихся действующих движителей и рулей, установленных в кормовых оконечностях всех корпусов крыльевого типа, сохранять прямой ход и/или управляться в горизонтальной и вертикальной плоскостях. Например, если в надводном или подводном положении откажет один из боковых движителей, то необходимо отключить второй работающий боковой движитель и идти прямым ходом при работе среднего движителя в центральном подводном торпедообразном корпусе и/или обеспечивать необходимое маневрирование в горизонтальной и вертикальной плоскостях при помощи рулей, установленных в кормовых оконечностях всех корпусов крыльевого типа. При отказе работы среднего движителя аналогичное движение и/или маневрирование обеспечивается за счет работы двух боковых движителей и рулей. Все это существенно повышает надежность и безопасность эксплуатации надводно-подводного аппарата.
В результате предложенный надводно-подводный аппарат с изменяемой геометрией формы корпуса за счет оснащения центральным подводным торпедообразным корпусом, центральным вертикальным хорошо обтекаемым корпусом крыльевого типа, рулями, установленными в кормовых оконечностях всех корпусов крыльевого типа (центрального, двух боковых и верхнего), а также за счет установки в кормовых оконечностях всех трех подводных торпедообразных корпусов водометных движителей насосного типа обеспечит повышение гидродинамических, эксплуатационных характеристик, надежности и управляемости на всех режимах движения по сравнению с известным высокоскоростным надводно-подводным судном.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАДВОДНО-ПОДВОДНЫЙ АППАРАТ | 2019 |
|
RU2726586C1 |
| КОРПУС СУДНА ТУННЕЛЬНОГО ТИПА С ДЕМПФИРУЮЩИМИ ПЛАСТИНАМИ | 2016 |
|
RU2617876C1 |
| КОРМОВАЯ ОКОНЕЧНОСТЬ СУДНА ТУННЕЛЬНОГО ТИПА | 2012 |
|
RU2495781C1 |
| КОРПУС СУДНА (ВАРИАНТЫ) | 2005 |
|
RU2302971C2 |
| ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС СУДНА ТУННЕЛЬНОГО ТИПА | 2014 |
|
RU2583328C2 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| КОРПУС С КОРМОВЫМИ СТАБИЛИЗАТОРАМИ ДЛЯ БЫСТРОХОДНОГО СУДНА | 1998 |
|
RU2243126C2 |
| КОРПУС СУДНА ТУННЕЛЬНО-СКЕГОВОГО ТИПА | 2014 |
|
RU2555255C1 |
| ВЫСОКОСКОРОСТНОЕ СУДНО-ЭКРАНОПЛАН С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ (ВАРИАНТЫ) | 2018 |
|
RU2681784C1 |
| СПОСОБ ПОВЫШЕНИЯ ПРОПУЛЬСИВНЫХ КАЧЕСТВ СУДОВ ПРИ СОЗДАНИИ ТЯГИ | 2001 |
|
RU2228873C2 |

Изобретение относится к области судостроения и касается конструирования надводно-подводного аппарата с изменяемой геометрией формы корпуса. Надводно-подводный аппарат с изменяемой геометрией формы корпуса содержит центральный подводный торпедообразный корпус, два боковых подводных торпедообразных корпуса, центральный вертикальный хорошо обтекаемый корпус крыльевого типа, два боковых корпуса крыльевого типа и верхний хорошо обтекаемый корпус также крыльевого типа. Центральный вертикальный корпус крыльевого типа имеет жесткое соединение с центральным подводным торпедообразным корпусом и с верхним корпусом крыльевого типа. Каждый боковой корпус крыльевого типа жестко соединен с соответствующим боковым подводным торпедообразным корпусом и имеет подвижное соединение с верхним корпусом крыльевого типа. Технический результат заключается в улучшении гидродинамических и эксплуатационных характеристик надводно-подводного аппарата, повышении его надежности. 2 з.п. ф-лы, 5 ил.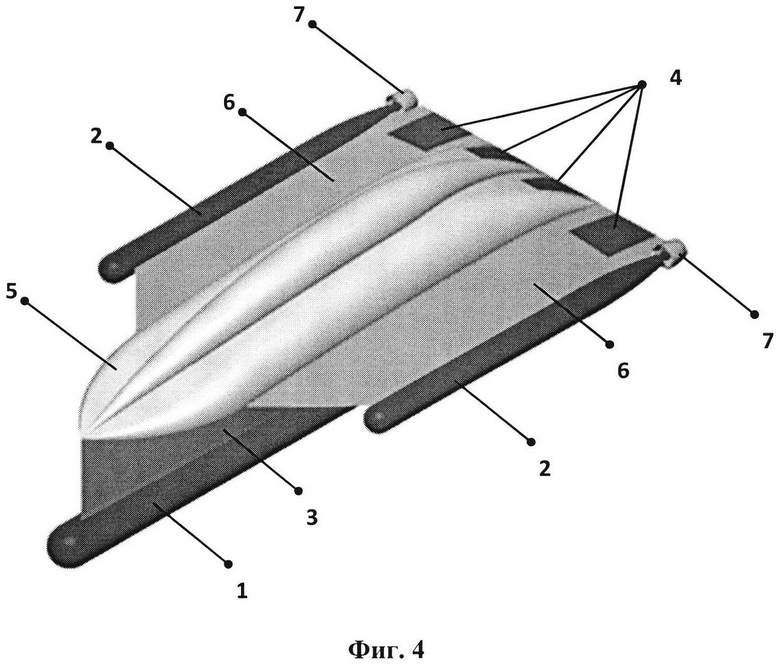
1. Надводно-подводный аппарат с изменяемой геометрией формы корпуса, содержащий верхний корпус крыльевого типа, два боковых подводных торпедообразных корпуса, два боковых корпуса крыльевого типа, причем каждый боковой корпус крыльевого типа жестко соединен с соответствующим боковым подводным торпедообразным корпусом и имеет подвижное соединение с верхним корпусом, отличающийся тем, что дополнительно оснащается центральным подводным торпедообразным корпусом и центральным вертикальным корпусом крыльевого типа, который имеет жесткое соединение с верхним корпусом крыльевого типа и с центральным подводным торпедообразным корпусом.
2. Надводно-подводный аппарат с изменяемой геометрией формы корпуса по п. 1, отличающийся тем, что в кормовых оконечностях всех торпедообразных корпусов установлены водометные движители насосного типа.
3. Надводно-подводный аппарат с изменяемой геометрией формы корпуса по п. 1 или 2, отличающийся тем, что все корпуса крыльевого типа в кормовых оконечностях оснащаются рулями.
| US 2015000584 A1, 01.01.2015 | |||
| ТРИМАРАН С ПОВОРОТНЫМИ АУТРИГЕРАМИ | 2011 |
|
RU2554729C2 |
| CN 103496428 A, 08.01.2014 | |||
| WO 9900291 A1, 07.01.1999 | |||
| МНОГОКОРПУСНОЕ СУДНО | 1992 |
|
RU2084368C1 |
| Стабилизированный преобразователь постоянного напряжения | 1975 |
|
SU581557A1 |

