Изобретение относится к области судостроения и касается конструирования надводно-подводного аппарата.
Известен надводно-подводный аппарат с изменяемой геометрией формы корпуса (патент RU 2653983, МПК: В63В 1/10, В63В 1/28, В63В 1/32, В63В 3/13, B63G 8/00), который содержит центральный подводный торпедообразный корпус, два боковых подводных торпедообразных корпуса, центральный вертикальный хорошо обтекаемый корпус крыльевого типа, два боковых корпуса крыльевого типа и верхний хорошо обтекаемый корпус также крыльевого типа. Движение этого надводно-подводного аппарата обеспечивается тремя водометными движителями насосного типа, установленными в кормовых оконечностях всех трех подводных торпедообразных корпусов. Центральный вертикальный корпус крыльевого типа имеет жесткое соединение с центральным подводным торпедообразным корпусом и с верхним корпусом крыльевого типа. Каждый боковой корпус крыльевого типа жестко соединен с соответствующим боковым подводным торпедообразным корпусом и имеет подвижное соединение с верхним корпусом. Для обеспечения управляемости все корпуса крыльевого типа (центральный, два боковых и верхний) в кормовых оконечностях оснащены рулями.
Надводно-подводный аппарат с изменяемой геометрией формы корпуса по патенту RU 2653983 принят за прототип.
Указанное известное изобретение обладает известным недостатком, который заключается в том, что каждый боковой корпус крыльевого типа надводно-подводного аппарата, жестко соединенный с соответствующим боковым торпедообразным корпусом, имеет подвижное соединение с верхним корпусом крыльевого типа (поворотный механизм). Эти конструктивно сложные подвижные соединения, работающие в водной среде, требуют дополнительных устройств и систем управления, которые могут быть подвержены коррозии в воде и, теоретически, могут заклиниваться и даже ломаться. В целом этот факт приводит к снижению надежности работы всего необитаемого надводно-подводного аппарата с изменяемой геометрией корпуса.
Кроме того, работа этих подвижных соединений (поворотных механизмов) требует дополнительных затрат энергии, а, следовательно, количества аккумуляторных батарей на этом надводно-подводном аппарате с изменяемой геометрией корпуса. Это, с учетом вышесказанного, приводит к необходимости выделения на надводно-подводном аппарате дополнительных занимаемых полезных объемов для размещения в них механизмов подвижных соединений и аккумуляторных батарей, необходимых для обеспечения энергией их работы, что в целом приводит к уменьшению эксплуатационных параметров всего надводно-подводного аппарата с изменяемой геометрией корпуса.
В итоге наличие на надводно-подводном аппарате с изменяемой геометрией корпуса двух подвижных устройств (поворотных механизмов) для поворота боковых корпусов крыльевого типа с соответствующими торпедообазными корпусами приводит к снижению надежности работы этого аппарата, а также дополнительным затратам энергии на работу подвижных устройств и аккумуляторных батарей, обеспечивающих их работу, что в целом снижает его эксплуатационную эффективность.
Целью изобретения является повышение надежности работы и уменьшение энергозатрат на всех режимах движения надводно-подводного аппарата, что приводит к повышению его эксплуатационных характеристик.
Цель достигается тем, что предложенный надводно-подводный аппарат состоит из двух боковых подводных торпедообразных корпусов, двух боковых корпусов крыльевого типа, центрального подводного торпедообразного корпуса, центрального вертикального корпуса крыльевого типа и верхнего корпуса крыльевого типа. Все корпуса конструктивно имеют жесткое соединение. При этом для нейтрализации негативного опрокидывающего момента, возникающего в вертикальной плоскости симметрии этого надводно-подводного аппарата при его движении в подводном положении от возникающих разнонаправленных сил, а именно, сил сопротивления, действующих на верхний, боковые и центральный корпуса крыльевого типа, и противоположно действующих сил тяги водометных движителей насосного типа, установленных на торпедообразных корпусах, в кормовой оконечности верхнего корпуса крыльевого типа на торпедообразной наделке установлен дополнительный водометный движитель насосного типа. В этом случае надводно-подводный аппарат сможет двигаться не только прямолинейно, но и существенно повысить свою управляемость в вертикальной плоскости при движении в подводном положении за счет различных режимов работы водометного движителя насосного типа, установленного в кормовой оконечности верхнего корпуса крыльевого типа, и аналогичных движителей, установленных на торпедообразных корпусах.
Верхний корпус крыльевого типа выполнен с торпедообразной наделкой в кормовой оконечности, на которой установлен водометный движитель насосного типа. Дополнительно надводно-подводный аппарат оборудуется водометными движителями насосного типа в кормовых оконечностях боковых подводных торпедообразных корпусов либо в кормовой оконечности центрального подводного торпедообразного корпуса и в кормовых оконечностях боковых подводных торпедообразных корпусов. Для изменения направления движения в горизонтальной и в вертикальной плоскостях все корпуса крыльевого типа (центральный, два боковых и верхний) в кормовых оконечностях оборудованы рулями.
Предлагаемое изобретение поясняется на фиг. 1-8, где:
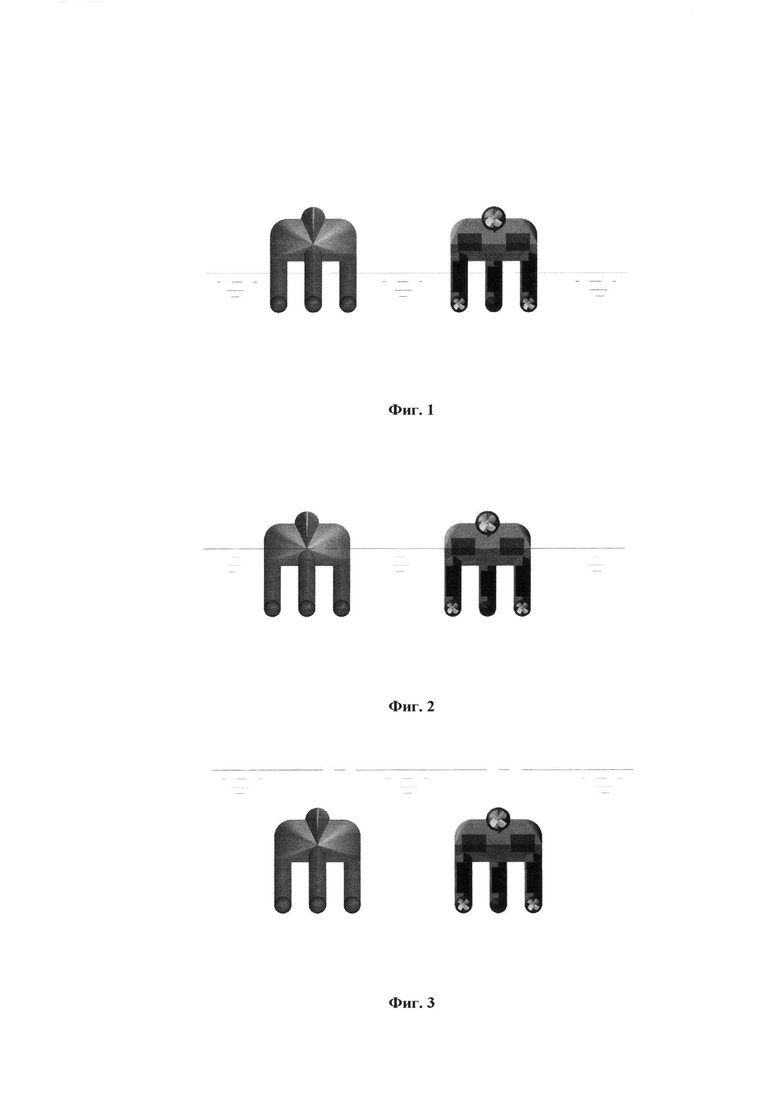
фиг. 1 - вариант движения надводно-подводного аппарата, оборудованного водометными движителями насосного типа в кормовых оконечностях боковых подводных торпедообразных корпусов в надводном положении;
фиг. 2 - вариант движения надводно-подводного аппарата, оборудованного водометными движителями насосного типа в кормовых оконечностях боковых подводных торпедообразных корпусов в полупогруженном режиме;
фиг. 3 - вариант движения надводно-подводного аппарата, оборудованного водометными движителями насосного типа в кормовых оконечностях боковых подводных торпедообразных корпусов в подводном положении;
фиг. 4 - вариант движения надводно-подводного аппарата, оборудованного водометными движителями насосного типа в кормовых оконечностях всех подводных торпедообразных корпусов в подводном положении;
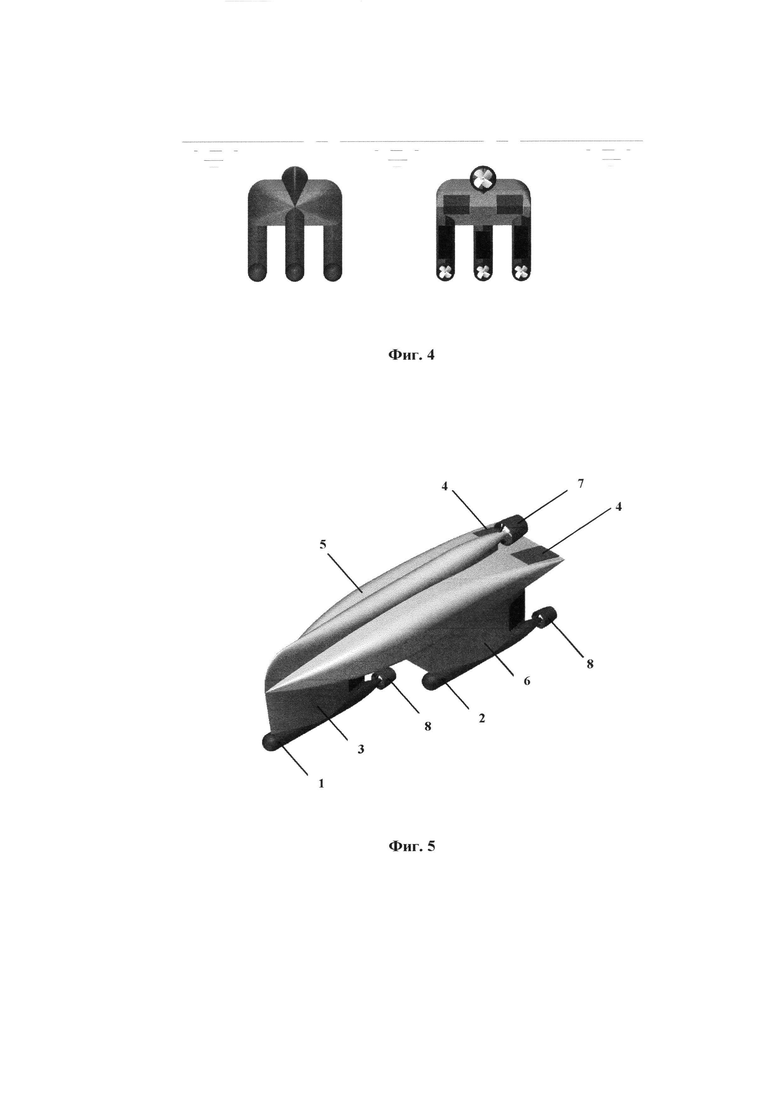
фиг. 5 - изометрическая проекция надводно-подводного аппарата, оборудованного водометными движителями насосного типа в кормовых оконечностях всех подводных торпедообразных корпусов;
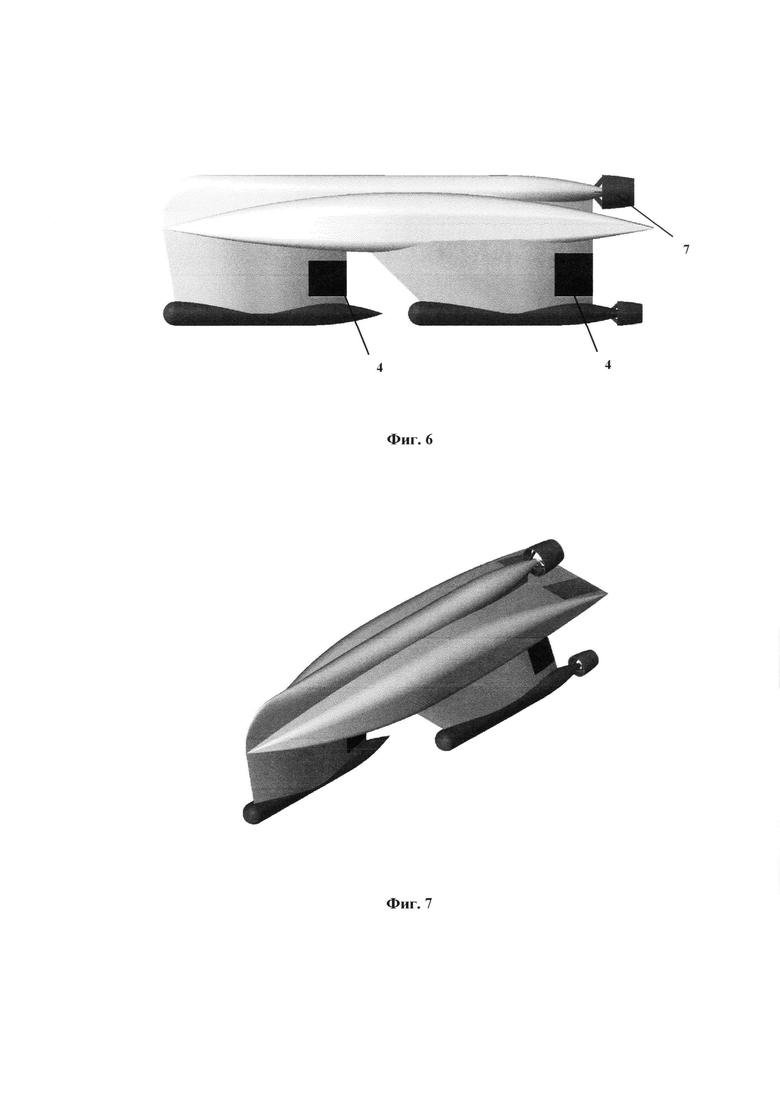
фиг. 6 - вид сбоку надводно-подводного аппарата, оборудованного водометными движителями насосного типа в кормовых оконечностях боковых подводных торпедообразных корпусов;
фиг. 7 - вариант конфигурации боковых корпусов надводно-подводного аппарата, оборудованного водометными движителями насосного типа в кормовых оконечностях боковых подводных торпедообразных корпусов, изометрическая проекция;
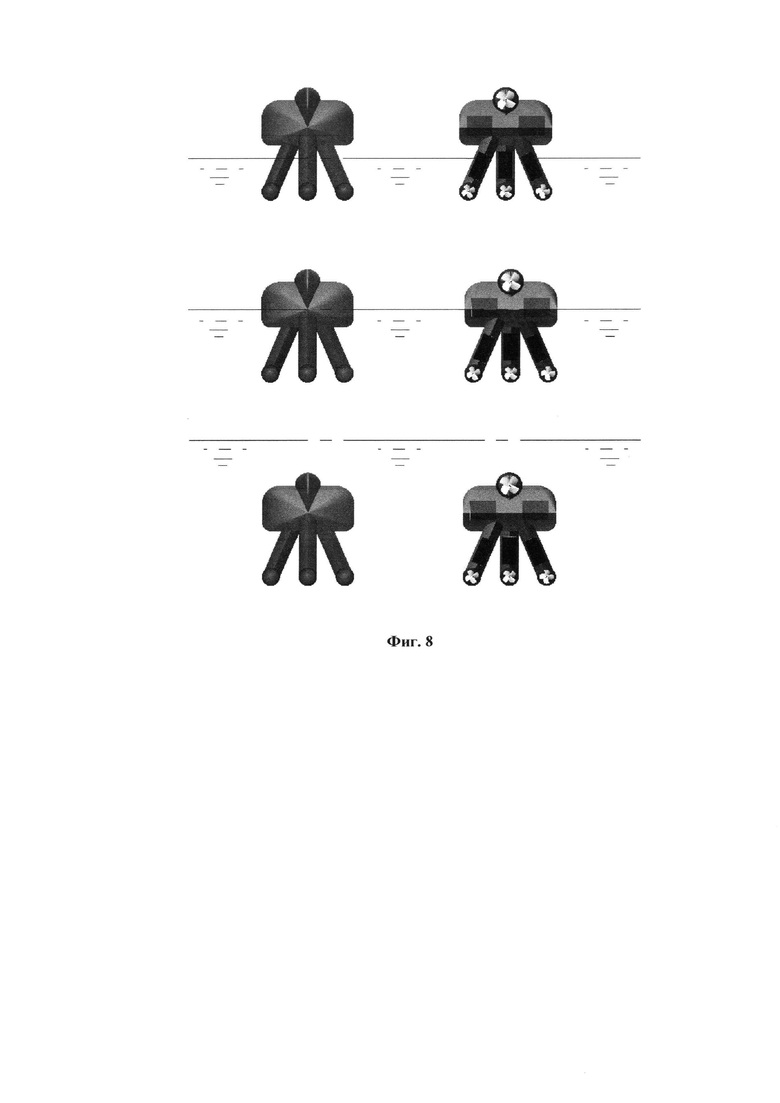
фиг. 8 - вариант конфигурации боковых корпусов надводно-подводного аппарата, оборудованного водометными движителями насосного типа в кормовых оконечностях всех подводных торпедообразных корпусов, в возможных режимах движения. Надводно-подводный аппарат содержит центральный подводный торпедообразный корпус 1, два боковых подводных торпедообразных корпуса 2, центральный вертикальный корпус 3 крыльевого типа, два боковых корпуса 6 крыльевого типа и верхний корпус 5 крыльевого типа. В кормовой оконечности верхнего корпуса установлен водометный движитель насосного типа 7. В кормовых оконечностях боковых подводных торпедообразных корпусов либо в кормовой оконечности центрального подводного торпедообразного корпуса и в кормовых оконечностях боковых подводных торпедообразных корпусов установлены водометные движители насосного типа 8. Все корпуса крыльевого типа (центральный, два боковых и верхний) в кормовых оконечностях оснащены рулями 4.
На фиг. 1-4 показаны возможные режимы движения надводно-подводного аппарата.
Водометный движитель насосного типа, установленный в кормовой оконечности верхнего корпуса в режиме движения в подводном положении обеспечивает прирост мощности, увеличение скорости движения, улучшение маневренных качеств и стабилизацию вращающего момента, который может возникнуть в результате работы водометных движителей насосного типа, установленных на подводных торпедообразных корпусах.
На фиг. 7-8 показан вариант конфигурации боковых корпусов надводно-подводного аппарата. В этой конфигурации также все корпуса конструктивно имеют жесткое соединение. Данная конфигурация обеспечивает снижение бортовой качки в надводном и полупогруженном режимах, что дополнительно улучшает остойчивость надводно-подводного аппарата.
В результате предложенный надводно-подводный аппарат за счет конструкции жесткого соединения всех корпусов и установки в кормовой оконечности верхнего корпуса крыльевого типа водометного движителя насосного типа обеспечит повышение эксплуатационных характеристик, маневренных качеств, надежности и уменьшение расхода энергии на всех режимах движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАДВОДНО-ПОДВОДНЫЙ АППАРАТ С ИЗМЕНЯЕМОЙ ГЕОМЕТРИЕЙ ФОРМЫ КОРПУСА | 2017 |
|
RU2653983C1 |
| КОРПУС СУДНА ТУННЕЛЬНОГО ТИПА С ДЕМПФИРУЮЩИМИ ПЛАСТИНАМИ | 2016 |
|
RU2617876C1 |
| КОРМОВАЯ ОКОНЕЧНОСТЬ СУДНА ТУННЕЛЬНОГО ТИПА | 2012 |
|
RU2495781C1 |
| ДВИЖИТЕЛЬНЫЙ КОМПЛЕКС СУДНА ТУННЕЛЬНОГО ТИПА | 2014 |
|
RU2583328C2 |
| КОРПУС СУДНА (ВАРИАНТЫ) | 2005 |
|
RU2302971C2 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| СУДНО НА ПОДВОДНЫХ КРЫЛЬЯХ | 2010 |
|
RU2434778C1 |
| КОРПУС СУДНА ТУННЕЛЬНО-СКЕГОВОГО ТИПА | 2014 |
|
RU2555255C1 |
| КОРПУС СУДНА ТУННЕЛЬНОГО ТИПА | 2012 |
|
RU2499721C1 |
| Планарный корпус корабля, предназначенный для размещения функциональных комплексов авианесущего или транспортно-десантного корабля | 2021 |
|
RU2770817C1 |
Изобретение относится к области судостроения и касается конструирования надводно-подводного аппарата. Предложен надводно-подводный аппарат, содержащий верхний корпус крыльевого типа, два боковых и центральный корпуса крыльевого типа, в кормовых оконечностях которых установлены рули, два боковых и центральный подводные торпедообразные корпуса, в кормовых оконечностях которых установлены водометные движители насосного типа, причем каждый боковой и центральный корпуса крыльевого типа жестко соединены с соответствующими боковыми и центральным торпедообразными корпусами, отличающийся тем, что боковые и центральный корпуса крыльевого типа жестко соединены с верхним корпусом крыльевого типа, в кормовой оконечности которого на торпедообразной наделке установлен водометный движитель насосного типа. Технический результат заключается в повышении эксплуатационных характеристик, маневренных качеств, надежности аппарата и уменьшении расхода энергии на всех режимах его движения. 8 ил.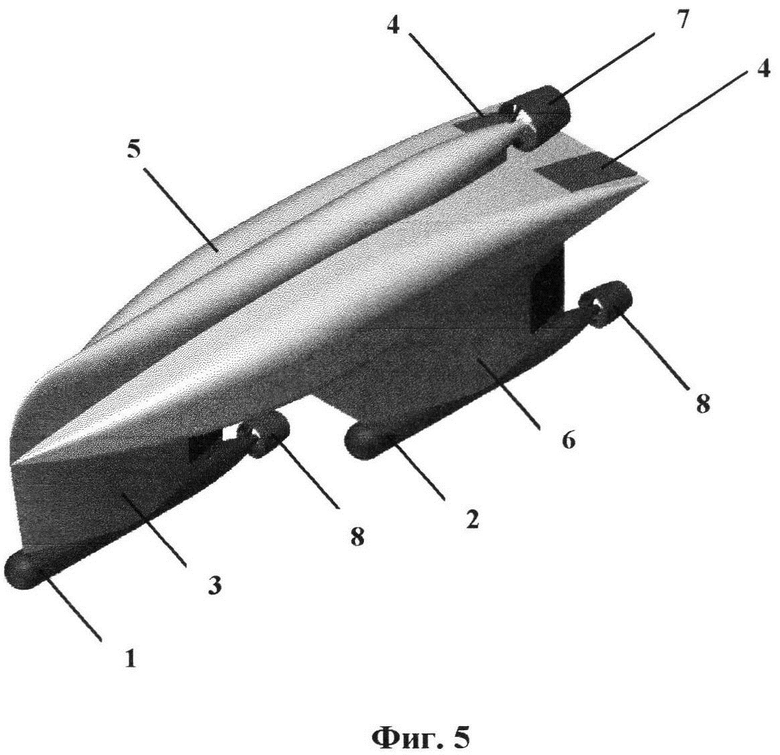
Надводно-подводный аппарат, содержащий верхний корпус крыльевого типа, два боковых и центральный корпуса крыльевого типа, в кормовых оконечностях которых установлены рули, два боковых и центральный подводные торпедообразные корпуса, в кормовых оконечностях которых установлены водометные движители насосного типа, причем каждый боковой и центральный корпуса крыльевого типа жестко соединены с соответствующими боковыми и центральным торпедообразными корпусами, отличающийся тем, что боковые и центральный корпуса крыльевого типа жестко соединены с верхним корпусом крыльевого типа, в кормовой оконечности которого на торпедообразной наделке установлен водометный движитель насосного типа.
| НАДВОДНО-ПОДВОДНЫЙ АППАРАТ С ИЗМЕНЯЕМОЙ ГЕОМЕТРИЕЙ ФОРМЫ КОРПУСА | 2017 |
|
RU2653983C1 |
| US 4981099 A, 01.01.1991 | |||
| US 1757174 A, 06.05.1930 | |||
| US 2015000584 A1, 01.01.2015 | |||
| CN 106741584 A, 31.05.2017 | |||
| ОДНОСЛОЙНАЯ ОБОЛОЧКА | 0 |
|
SU183537A1 |
| WO 9900291 A1, 07.01.1999. | |||

