Изобретение относится к измерительной технике, в частности к углоизмерительным устройствам, используемым для определения астрономических координат объектов, в частности, направления меридиана, проходящего через точку наблюдения. Устройство может быть использовано для тестирования и настройки мобильных устройств, применяемых в автономных навигационных системах.
Известные в настоящее время углоизмерительные приборы широко применяются для измерения координат объектов, расположенных на земной поверхности, с привязкой к геодезической сети [1], в навигационных системах различного назначения, в том числе, космических аппаратов [2], для инженерно-геодезических работ при строительстве инженерных сооружений и монтаже оборудования [3].
Известен, например, углоизмерительный прибор [Пат. РФ №2442109, МПК G01C 21/24, 09.06.2010 г.], содержащий объектив звездного канала, в фокальной плоскости которого установлен матричный приемник излучения, подключенный к вычислительному блоку, устройство ввода излучения в объектив звездного канала, при этом объектив звездного канала осуществляет формирование первого точечного изображения от астрономического источника излучения на матричном приемнике излучения, а устройство ввода излучения в объектив звездного канала и объектив звездного канала осуществляют формирование второго точечного изображения от указанного астрономического источника излучения на матричном приемнике излучения. При этом для увеличения освещенности во втором точечном изображении от астрономического источника излучения на матрице приемного устройства, устройство ввода излучения в объектив звездного канала может быть выполнено в виде прозрачной плоскопараллельной пластины с нанесенным светоделительным отражающим покрытием. Основным недостатком такого прибора является невозможность работы с неизлучающими объектами, например, зеркалами, неосвещенными марками и знаками, установленными на объектах, координаты которых необходимо определить.
Наиболее близким к заявляемому устройству по совокупности существенных признаков является устройство для определения астрономических координат [А.с. СССР №1585681, МПК G01C 1/00, 06.05.87 г.], содержащее установленные на основании оптический блок с тремя жестко связанными между собой отражающими гранями, две из которых наклонные, одна - вертикальная, жидкостный горизонт, автоколлимационный блок в виде зрительной трубы с тест-объектом, осью вращения и отсчетным узлом, при этом жидкостный горизонт оптически сопряжен с первой отражающей наклонной гранью оптического элемента и со зрительной трубой, с которой сопряжена вторая отражающая наклонная грань.
Недостатком этого устройства является «ограниченность области применения» из-за невозможности работы одновременно с несколькими объектами, например светилом и маркой или знаком, установленными на земных объектах, а также недостаточная точность из-за большого числа операций, которые необходимо произвести для определения направления на светило.
Предложено устройство для определения астрономических координат объекта, позволяющее в реальном масштабе времени определять с высокой точностью угловые координаты подвижных и неподвижных объектов наблюдения и тем самым астрономические координаты в точке наблюдения в условиях ограниченного доступа к стационарной геодезической сети и нестабильных условиях наблюдения.
Такой технический эффект достигнут, когда в устройстве для определения астрономических координат объекта, включающем установленные на основании оптический блок с тремя жестко связанными между собой отражающими гранями, две из которых наклонные, одна - вертикальная, автоколлимационный блок, содержащий объектив, тест-объект и отсчетный узел, отражательный горизонт, оптически сопряженный с первой отражательной наклонной гранью оптического блока и с объективом, с которым, в свою очередь, сопряжена вторая отражательная наклонная грань, а третья грань установлена перпендикулярно оптической оси объектива, новым является то, что оптический блок выполнен составным из двух жестко связанных базовыми гранями призм, одна из которых выполнена в виде призмы АР-90° и имеет опорную грань, обращенную в сторону отражательного горизонта, и базовую грань, обращенную в сторону объектива, вторая призма выполнена с углом α между отражающей и базовой гранями, найденным из условия
α=ϕ/2÷((ϕ-u)/2),
где ϕ - широта местности, где производят измерения, град;
u - угол поля зрения объектива, град;
при этом отношение размеров отражающих граней призм выбрано из условия обеспечения равной интенсивности отраженных сигналов, базовые грани призм соединены так, что главные сечения обеих призм лежат в одной плоскости, перпендикулярной плоскости отражательного горизонта и проходящей через оптическую ось объектива призмы, а отсчетный узел выполнен в виде матричного приемного устройства, соединенного с вычислительным блоком, связанным с датчиком точного времени.
В основе изобретения лежит определение в горизонтальной плоскости в пункте наблюдения направления меридиана, как проекции на горизонтальную плоскость вертикальной плоскости, проходящей через зенит в точке наблюдения и полюс мира, определяемый как центр траектории движения наблюдаемого объекта.
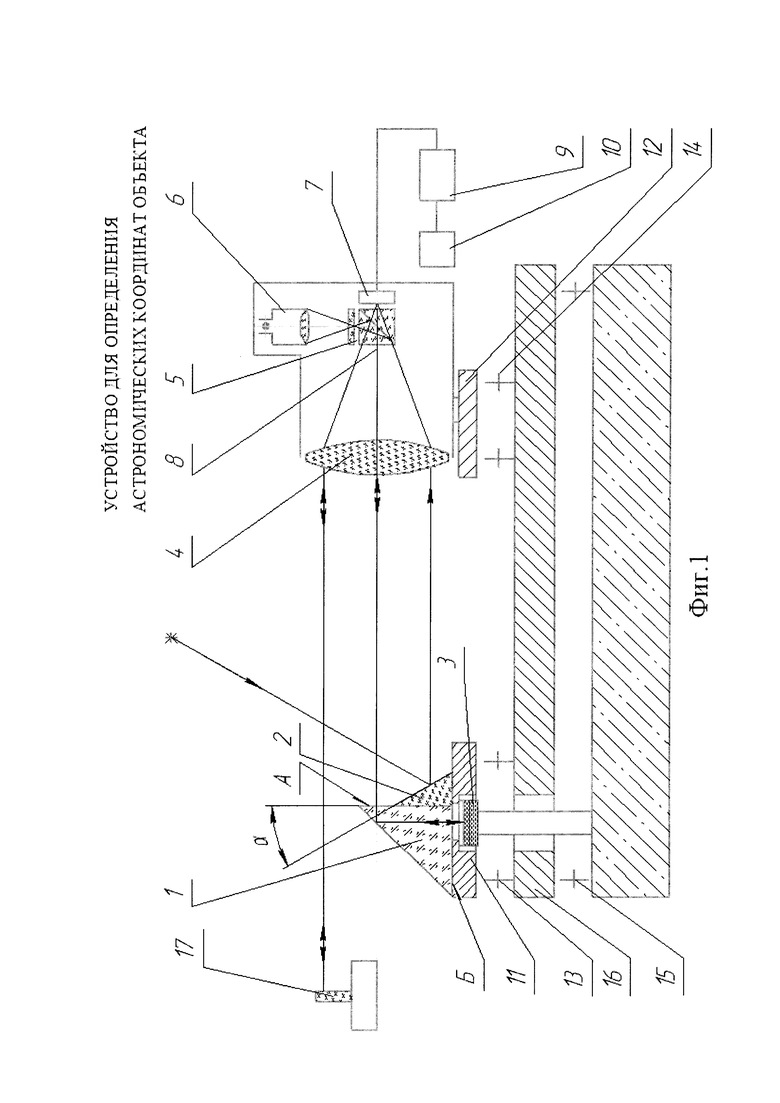
На фиг. 1 представлено устройство для определения астрономических координат объекта в сечении плоскостью, совпадающей с плоскостью главных сечений призм и проходящей через оптическую ось объектива, где оптический блок, состоящий из призмы 1, призмы 2, отражательный горизонт 3, объектив 4, автоколлимационный блок с маркой 5, осветителем 6, матричным приемным устройством 7, светоделителем 8, вычислительным блоком 9, датчиком 10 точного времени, установочные столики 11, 12, котировочные узлы 13, 14, 15 основание 16, тестируемый объект 17;
А - базовая грань призм;
Б - опорная грань призм;
α - угол при вершине второй призмы, град.;
 - направление хода лучей;
- направление хода лучей;
* - светило.
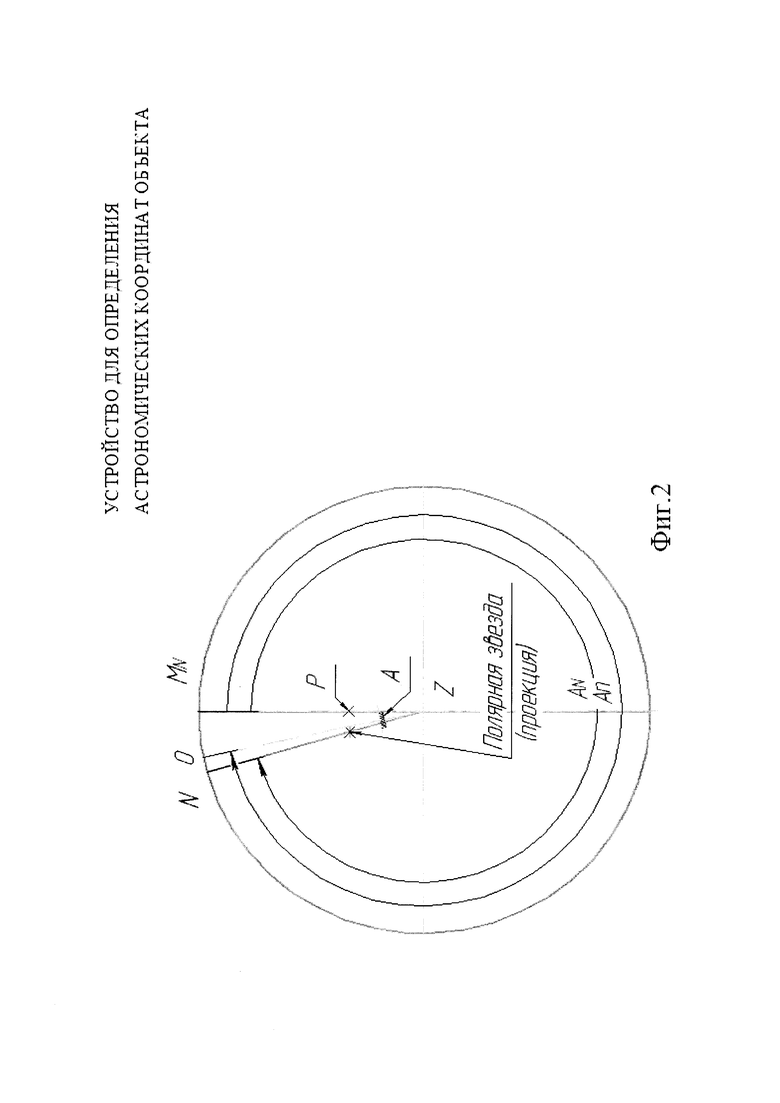
На фиг. 2 представлена схема направлений в горизонтальной плоскости в точке наблюдения, где
N - направление на светило;
О - направление визирной оси устройства;
MN - направление на север;
Р - проекция полюса мира;
Z - точка наблюдения, проекция зенита;
А - базовая грань призм;
AN - азимут светила;
An - азимут устройства.
При решении ряда топографических, геодезических, навигационных задач для определения географических координат земных объектов широко применяются астрономические наблюдения небесных светил, координаты которых в определенное время известны в определенной системе координат. В одном из азимутальных способов определения географических координат широта и долгота точки наблюдения определяется по измеренным разностям азимутов звезд в известные моменты времени. Известно, что для обеспечения выгоднейших условий наблюдений, позволяющих достичь максимальной точности определения величин, необходимо использовать для наблюдения близполюсные звезды. В северном полушарии этому критерию удовлетворяет Полярная звезда.
Предлагаемое устройство работает следующим образом.
В точке наблюдения (точка Z на фиг. 2) в горизонтальной плоскости, построенной с помощью объектива 4, призмы 1 (А - базовая грань призм на фиг. 2) и отражательного горизонта 3, определяют в горизонтальном круге положение визирной оси устройства. На фиг. 2 это направление обозначено как «О». Визирная ось является одной из координатных осей устройства в прямоугольной системе координат.
Определение величины азимутального угла Полярной звезды (N - направление на светило на фиг. 2) с помощью вычислительного блока 9 ведется непрерывно, синхронно с датчиком точного времени 10. Измерение ведется относительно визирной оси устройства, проходящей через 0 системы координат матрицы приемного устройства 7.
Для того чтобы определить угловое отклонение визирной оси устройства от направления на север (MN на фиг. 2), с помощью вычислительного блока 9 определяют положение центра траектории перемещения изображения Полярной звезды в плоскости матрицы приемного устройства (точка Р на фиг. 2), для этого за 2-3 часа времени наблюдения берут на траектории минимум 5 точек и производят вычисления координат траектории одним из известных способов [4].
При подготовке к работе оптический блок, содержащий призму 1 с жестко связанной с ней призмой 2 с углом α, и объектив 4 с фокальным узлом с помощью котировочных узлов 12 и 13, устанавливают относительно друг друга так, что автоколлимационное изображение марки 5 от базовой поверхности призмы 1 попадет в центр матрицы приемного устройства 7. Достигнутое взаимное расположение оптического блока и объектива 4 с фокальным узлом фиксируют с помощью зажимных элементов котировочных узлов 12 и 13.
При проведении измерений основание 16 устанавливают в горизонтальной плоскости в направлении полюса (в данном случае - севера) с точностью (0,5-1) угловых минут с азимутом, противоположным азимуту светила, в данном случае - Полярной звезды. Перемещая устройство в горизонтальной плоскости, добиваются попадания изображения Полярной звезды на матрицу в тот квадрант, который соответствует времени наблюдения светила (это известно из таблиц наблюдений). После этого, используя котировочные узлы 15, устройство устанавливают так, что центр автоколлимационного изображения марки 5 от отражательного горизонта 3 попадает в центр координат матрицы приемного устройства 7. Такое совпадение двух автоколлимационных изображений марки 5 свидетельствует о том, что визирная ось устройства расположена горизонтально и совпадает с одной из осей прямоугольной системы координат, в которой производятся измерения астрономических координат светила.
Параллельный световой пучок, излучаемый Полярной звездой, отражаясь от наклонной грани призмы 2, попадает в поле зрения объектива 4, который формирует изображение звезды на поверхности матрицы приемного устройства 7.
С помощью вычислительного блока 9 определяют координаты центра изображения Полярной звезды, которые в совокупности с данными времени момента наблюдения, поступающими от датчика точного времени 10, используются для вычисления астрономического азимута Полярной звезды и направления меридиана (см., например, [4]). (В Приложении приведен разработанный метод определения координат центра траектории светила и, соответственно, направления меридиана в точке наблюдения светила).
После этого получают на матрице приемного устройства 7 автоколлимационное изображение сигнала от контрольного элемента тестируемого навигационного прибора 17, как правило, это автоколлимационное изображение марки 5.
Если стоит задача корректировки навигационного прибора, то сравнивая координату X центра изображения автоколлимационного сигнала и полюса, определяют величину азимутальной поправки, которую вводят в навигационный прибор 17.
Предлагаемое устройство позволяет повысить точность определения астрономических координат объектов за счет следующих факторов.
Новое конструктивное решение оптического блока и его оптическое сопряжение с объективом с фокальным узлом и отражательным горизонтом позволяет одновременно наблюдать плоскость горизонта и расположение светила во время сеанса работы с тестируемым объектом, что позволяет оценить стабильность положения визирной оси устройства относительно меридиана и при необходимости производить корректировку, уменьшив влияние нестационарных факторов, таких как изменение температуры, воздушных потоков, вибрации на результаты измерения.
Предложенное конструктивное решение оптического блока позволяет также существенно уменьшить влияние ошибок изготовления призм, таких как погрешности угловых размеров, пирамидальность призм, непосредственно влияющих на результат измерения. Этого добиваются при сборке оптического блока, контролируя расположение главных сечений призм 1 и 2 и жестко фиксируя их с помощью оптического контакта или склейки. Величину остаточной погрешности углов паспортизуют и учитывают в качестве поправок при проведении расчетов.
Совмещение вертикальной плоскости, проходящей через визирную ось устройства, с плоскостью меридиана позволяют избавиться от ошибок, подобных параллаксу, связанных с наблюдением объекта из разных точек или пересчету его положения в разных системах координат.
В конструкции устройства отсутствуют подвижные узлы и детали, используемые непосредственно в процессе измерений, поэтому отсутствуют погрешности измерений, связанные с характерными для них ошибками: зазорами в направляющих, неравномерностью хода, трением и т.д.
Способы уменьшения влияния случайных факторов, связанных с нестабильностью условий наблюдения (атмосферными искажениями, вибрацией и т.д.), известны и основаны на применении специальных устройств (астроиллюминаторов, светопроводов), математических статистических методов обработки результатов наблюдений, повышении быстродействия электронных элементов и устройств.
Оценка точности определения направления меридиана.
Оценка произведена из предположения, что центр изображения светила определен без ошибок и форма дифракционного пятна рассеяния изображения звезды не изменяется во время движения по траектории.
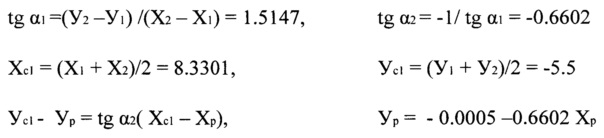
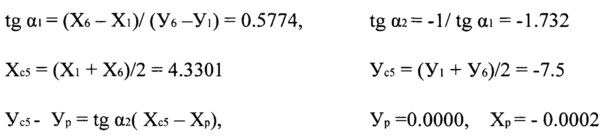
1. Оптический блок изготовлен без ошибок, величины углов призм находятся в допусках. Траектория движения Полярной звезды - окружность, tg α1 tg α2=-1 [6], R=10 мм. Фокусное расстояние объектива =700 мм. (Здесь и далее все линейные величины в миллиметрах).

Первый шаг
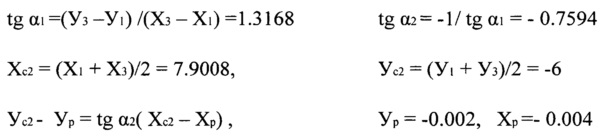
Второй шаг
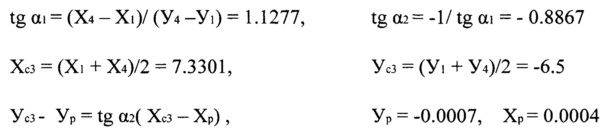
Третий шаг
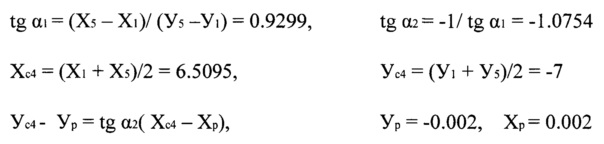
Четвертый шаг
Пятый шаг
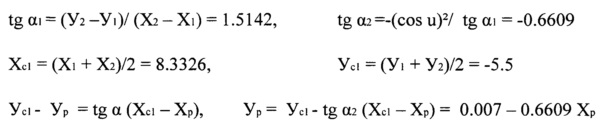
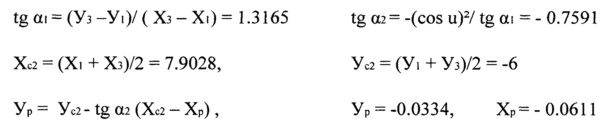
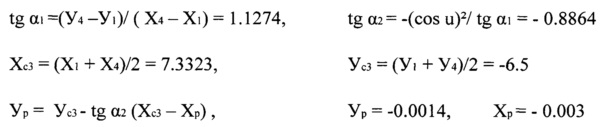
2. Траектория движения Полярной звезды - эллипс, tg α1 tg α2=-(cos u)2, как следствие, неортогональности оси светового пучка к плоскости матрицы приемного устройства.
Большая полуось эллипса а=r/cos u, малая полуось эллипса b=r, b=10 мм, u=1.5°. Фокусное расстояние объектива =700 мм.


Первый шаг
Второй шаг
Третий шаг
Четвертый шаг
Пятый шаг


Таким образом, можно сделать вывод о том, что после трех часов наблюдения за светилом расчет направления меридиана может быть произведен с точностью порядка сотых долей угловой секунды.
С учетом вышесказанного, оценка суммарной погрешности определения азимутальных координат объекта с использованием предлагаемого устройства составляет не более 0,2-0,3".
Литература
1. Кузнецов П.Н., Васютинский И.Ю., Ямбаев Х.К. Геодезическое инструментоведение: Учебник для вузов.- М.: Недра, 1984.
2. Колосов М.П. Оптика адаптивных угломеров. Введение в проектирование: монография. М., Логос, 2011.
3. Ямбаев Х.К. Специальные геодезические приборы для инженерно-геодезических работ. - М.: Недра, 1990.
4. С.С. Уралов. Курс геодезической астрономии. Учебник для вузов. М., «Недра», 1980.
5. И.И. Привалов. Аналитическая геометрия. Учебник для вузов. М., «Наука» 1964.
6. М.Я. Выгодский. Справочник по высшей математики. М., «Наука», 1969.
Приложение
Метод определения координат центра траектории светила и, соответственно, направления меридиана в точке наблюдения светила
Изображение Полярной звезды во время измерений непрерывно перемещается в поле зрения объектива устройства.
Эту траекторию в прямоугольной системе координат можно представить в виде системы уравнений
Y=r cosωt,
X=r sinωt,
где t - время суток,
ω - скорость вращения Земли вокруг своей оси,
r - радиус траектории в расчетном положении, определяемый как произведение азимутального угла светила в радианах на фокус объектива,
В процессе измерений синхронно с сигналами точного времени считывают координаты центра изображения светила, на матрице приемного устройства. Подходы к определению центра изображения известны. При этом в каждом такте измерений производят следующие вычисления:
- определение координат середины хорды, соединяющей первую точку на траектории светила со второй, затем первую с третьей и т.д.;
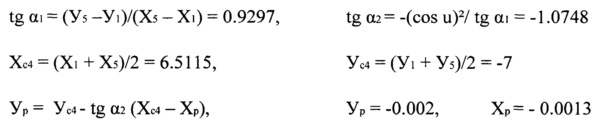
- определение tgα1, где α1 - угол в градусах между прямой, проходящей через эти точки, и осью матрицы приемного устройства, проходящей через большую ось эллипса, как отношение приращения координат X и У относительно координат первой точки наблюдения;
- определение tgα2, где α2 - угол в градусах между прямой, проходящей через середину хорды, соединяющей два центра изображения светила, и центр траектории, по которой перемещается изображение светила, и той же осью матрицы приемного устройства.
Эти два угла α1 и α2 связаны соотношением:
tg α1 tg α2=-1, что соответствует окружности [5].
Решая в каждом такте измерений систему уравнений
(Ус1-Ур)=tgα2(Xc1-Хр)
(Уcn-Ур)=tgα2(Xcn-Хр), где
Xc1 - абсцисса середины первого отрезка,
Ус1 - ордината середины первого отрезка,
Хр - абсцисса центра траектории,
Ур - ордината центра траектории,
1÷n - номер точки, находящейся в середине отрезка,
находят координаты центра траектории Хр и Ур, по которой движется светило [6].
Затем усредняют координаты Хр и Ур, например методом наименьших квадратов.
После того, как определены азимутальные величины направления на север и синхронные азимутальные положения Полярной звезды, для определения координат пользуются известными соотношениями, приведенными в [4].
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство определения астрономического азимута | 2023 |
|
RU2800187C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКОГО АЗИМУТА | 2007 |
|
RU2347252C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ГОРИЗОНТАЛЬНОГО НАПРАВЛЕНИЯ С ОДНОГО ГОРИЗОНТА НА ДРУГОЙ | 2001 |
|
RU2204116C2 |
| Астрометрический инструмент | 1984 |
|
SU1270736A1 |
| Фотоэлектрическое приемное устройство астрометрического инструмента | 1990 |
|
SU1775605A1 |
| УСТРОЙСТВО ДЛЯ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ПАРАМЕТРОВ ОРИЕНТАЦИИ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2016 |
|
RU2650730C1 |
| Устройство для ориентирования объекта по заданному направлению | 1982 |
|
SU1027518A1 |
| Визуально-фотоэлектрическая приставка к астрономо-геодезическому теодолиту | 1978 |
|
SU771600A1 |
| АВТОКОЛЛИМАЦИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ НЕРЕМЕЩЕНИЙ | 1972 |
|
SU349972A1 |
| УСТРОЙСТВО ЮСТИРОВКИ ДВУХЗЕРКАЛЬНОЙ ЦЕНТРИРОВАННОЙ ОПТИЧЕСКОЙ СИСТЕМЫ | 2011 |
|
RU2467286C1 |
Изобретение может быть использовано для тестирования и настройки мобильных устройств, применяемых в автономных навигационных системах. Устройство включает оптический блок с тремя жестко связанными между собой отражающими гранями, две - наклонные, одна - вертикальная, автоколлимационный блок, содержащий объектив, тест-объект и отсчетный узел, отражательный горизонт, оптически связанный с первой отражательной наклонной гранью и с объективом, с которым связана вторая отражательная наклонная грань, третья грань перпендикулярна оптической оси объектива. Оптический блок составлен из двух жестко связанных базовыми гранями призм. Одна из призм, АР-90°, имеет опорную грань, обращенную к отражательному горизонту, и базовую грань, обращенную к объективу. Вторая призма выполнена с углом α между отражающей и базовой гранями. Отношение размеров отражающих граней призм выбрано из условия равной интенсивности отраженных сигналов. Главные сечения призм лежат в одной плоскости, перпендикулярной плоскости отражательного горизонта и проходящей через оптическую ось объектива. Технический результат - определение с высокой точностью в реальном времени угловые координаты объектов и астрономические координаты в точке наблюдения в условиях ограниченного доступа к стационарной геодезической сети и нестабильных условиях наблюдения. 2 ил., 1 пр.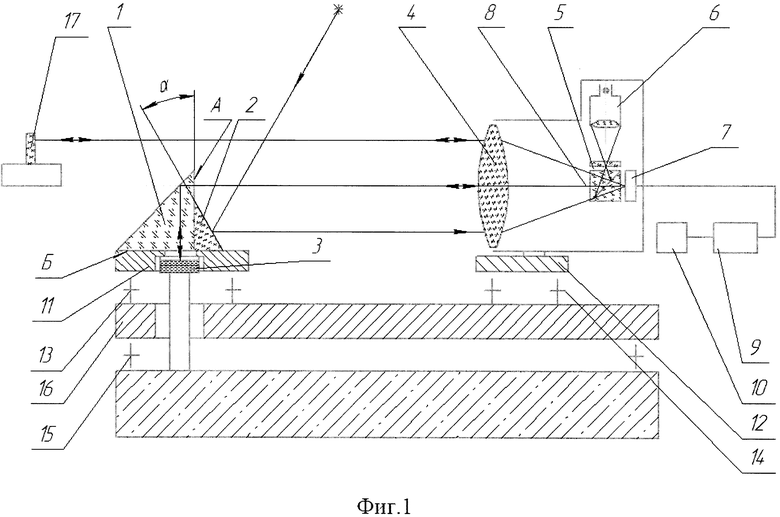
Устройство для определения астрономических координат объекта, включающее установленные на основании оптический блок с тремя жестко связанными между собой отражающими гранями, две из которых наклонные, одна - вертикальная, автоколлимационный блок, содержащий объектив, тест-объект и отсчетный узел, отражательный горизонт, оптически сопряженный с первой отражательной наклонной гранью оптического блока и с объективом, с которым, в свою очередь, сопряжена вторая отражательная наклонная грань, третья грань установлена перпендикулярно оптической оси объектива, отличающееся тем, что оптический блок выполнен составным из двух жестко связанных базовыми гранями призм, одна из которых выполнена в виде призмы АР-90° и имеет опорную грань, обращенную в сторону отражательного горизонта, и базовую грань, обращенную в сторону объектива, вторая призма выполнена с углом α между отражающей и базовой гранями, найденным из условия
α=ϕ/2÷((ϕ-u)/2),
где ϕ - широта местности, где производят измерения, град;
u - угол поля зрения объектива, град;
при этом отношение размеров отражающих граней призм выбрано из условия равной интенсивности отраженных сигналов, базовые грани призм соединены так, что главные сечения обеих призм лежат в одной плоскости, перпендикулярной плоскости отражательного горизонта и проходящей через оптическую ось объектива, а отсчетный узел выполнен в виде матричного приемного устройства, соединенного с вычислительным блоком, связанным с датчиком точного времени.
| Устройство для определения астрономических координат | 1987 |
|
SU1585681A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКИХ КООРДИНАТ | 1990 |
|
RU2120108C1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКОГО АЗИМУТА | 2007 |
|
RU2347252C1 |
| УГЛОИЗМЕРИТЕЛЬНЫЙ ЗВЕЗДНЫЙ ПРИБОР | 2010 |
|
RU2442109C1 |
| US 3551905 A, 29.12.1970. | |||

