Предлагаемое изобретение относится к области астрономо-геодезических измерений и может быть использовано для определения уклонений отвесной линии, уточнения параметров вращения Земли и для решения других геодезических задач, опирающихся на знание астрономических координат. Под астрономическими координатами ϕ,λ обычно понимают координаты места, полученные по измерениям углов между направлениями на опорные небесные светила и направлением силы тяжести в данном месте. Если независимо и более точно определены "геодезические координаты" на поверхности относимости, например, с помощью спутниковой навигационной системы, что эквивалентно измерению углов на светила относительно нормали к поверхности относимости, то простое сравнение астрономических и геодезических координат позволяет определить обе составляющие уклонения отвесной линии в данном месте Земли. Если уклонения определены, а время измерений и астрономические координаты места (их начальные истинные значения) известны, то измерение астрономических координат позволяет определять положение земной оси и неравномерность ее вращения.
Помимо научного значения, возможность определения уклонений отвесной линии по астрономическим координатам имеет большое прикладное значение для навигации и баллистики, то есть для решения оборонных задач.
Аналогом предлагаемого устройства для определения астрономических координат являются навигационные секстаны разных типов (см., например, Б.Н.Красовцев, Мореходная астрономия, М., Транспорт, 1978 г., с. 123, 126, 288), позволяющие измерять высоты небесных светил над естественным или искусственным горизонтом с подвижного основания с погрешностью около 1 угл. мин. Однако для указанных выше целей точность измерения должна быть гораздо выше - погрешность устройства должна быть порядка 1 угл. сек.
Прототипом изобретения является призменная астролябия, подробно описанная, например, в книге "Телескопы" по ред. Дж. Койлера и Б. Миддлхерст, изд-во "Иностранная литература". -М. : 1963, с. 149-161, которая обеспечивает требуемую точность за длительный промежуток времени, с неподвижного основания и за исключением высоких широт. Как известно, в призменной астролябии измерения высот звезд осуществляются строго на фиксированной высоте, по альмукантарату - это высота определена эталонным углом призмы. В качестве датчика горизонта используется ртутное зеркало, требующее неподвижного основания и заведомо непригодное даже при слабых динамических воздействиях на него. При совпадении высоты звезды с эталонным значением угла призмы происходит совпадение двух изображений звезды в астролябии и фиксируется время совпадения. Необходимость ждать момента точного совпадения изображений приводит к еще двум недостаткам призменной астролябии: низкому темпу измерений и непригодности для использования в высоких широтах, где совпадение может и вовсе не произойти, ибо звезды в высоких широтах движутся почти по альмукантарату.
Целью изобретения являются: обеспечение возможности измерений в высоких широтах; обеспечение возможности измерений с подвижного основания, например с ледового поля или с железнодорожной платформы; сокращение времени измерений.
Поставленная цель достигается введением в устройство телевизионного датчика с блоком вычисления взаимных угловых отстояний двух изображений звезды, выполнением зеркала жестким с установкой на нем определенным образом расположенных датчиков наклона, введением подвижных опор с редукторами и двигателями для горизонтирования зеркала и уменьшения диапазона измеряемых наклонов, введением вычислительного устройства, содержащего пороговое устройство, блок преобразования координат, блок коммутации двигателей, инвертор, блок вычисления астрономических координат, а также введение логических связей между вновь введенными элементами.
Устройство (см. чертеж) содержит призменную астролябию - эталонную призму 1, объектив 2, горизонтальное зеркало 3, установленные на поворотной платформе 4, а также датчик времени 5. Эти признаки характерны для прототипа, в котором зеркало - ртутное. Все остальные элементы устройства, приведенные на чертеже, расположение и связи между ними являются отличительными признаками предлагаемого устройства. В фокальной плоскости астролябии установлен телевизионный датчик 6. Горизонтальное зеркало выполнено жестким и с ним жестко связаны основной 7 и дополнительный 8 датчики наклона, установленные таким образом, что оси чувствительности каждого находятся в плоскости горизонта, ортогональны друг другу, причем ось чувствительности основного датчика расположена перпендикулярно плоскости визирования звезды. Введено вычислительное устройство 9, содержащее блок вычисления взаимных угловых отстояний двух изображений звезды 10, пороговое устройство 11, блок преобразования координат 12, блок коммутации двигателей 13, инвертор 14, блок вычисления астрономических координат 15. Основание всего устройства 16 установлено на трех "ногах", одна из которых 17 жестко связана с основанием, а две другие 18, 19 через редукторы 20, 21 соответственно связаны каждая со своим двигателем 22, 23. Двигатели установлены жестко на основании и электрически подключены к выходам блока коммутации 13, входы которого связаны с выходами блока преобразования координат 12 и инвертора 14. Выходы каждого датчика наклона 7, 8 подключены к входам блока преобразования координат 12 и порогового устройства 11. Выход основного датчика наклона 7 дополнительно подключен к входу блока вычисления астрономических координат 15. Выход телевизионного датчика 6 подключен к входу блока вычисления взаимных угловых отстояний двух изображений звезды 10, выход которого, как и выход датчика времени 5, подключен к входу блока вычисления астрономических координат. Выход порогового устройства 11 связан с телевизионным датчиком 6 и инвертором 14.
Работа устройства состоит в следующем.
После наведения астролябии на выбранную звезду, которое осуществляется в данном устройстве автоматически - разворотом платформы 4 в азимуте с помощью не указанного на чертеже двигателя, управляемого от вычислительного устройства 9 (указанные признаки, ранее в астролябии отсутствовавшие, авторы не сочли возможным включить в число отличительных, так как они приводят лишь к автоматизации астролябии), датчики наклона измеряют углы наклона платформы в повернутой на расчетный азимут системе координат и подают их одновременно в блок преобразования координат 12, пороговое устройство 11, а с основного датчика еще и в блок вычисления астрономических координат 15. Пороговое устройство определяет превышение углов наклона над выбранным (фиксированным) значением (в разработанном авторами действующем макете - 30 угл.с), в пределах которого характеристику каждого датчика наклона можно считать линейной и пригодной для последующих прецизионных измерений. Бинарный сигнал с порогового устройства подается на телевизионный датчик 6 и через инвертор 14 на блок коммутации двигателей 13. Блок преобразования координат через блок коммутации двигателей подает на них сигналы, необходимые для приведения платформы 4 и зеркала 3 в горизонтальное положение (с точностью до выбранного порога, например до тех же 30 угл.с). Для этого блок преобразования координат вычисляет элементы матрицы поворота платформы 4 относительно основания 16 по известным формулам и умножает на них значения сигналов с датчиков наклона. Если уровень этих сигналов выше порогового, то блок коммутации двигателей подает управляющие сигналы на двигатели 22, 23, которые приводят в движение подвижные опоры 18, 29 до тех пор, пока платформа не будет отгоризонтирована, то есть пока уровни сигналов с каждого датчика наклона не станут ниже порога. Тогда бинарный сигнал с порогового устройства через инвертор и блок коммутации двигателей отключает двигатели горизонтирования и включает телевизионный датчик 6. Сигналы телевизионного датчика поступают на вход блока вычисления взаимных угловых отстояний двух изображений звезды 10, который подает эти угловые отстояния на вход блока вычисления астрономических координат 15. Блок 10 анализирует и обрабатывает видеосигнал с датчика 6 и вырабатывает в цифровой форме в соответствующем масштабе вертикальные угловые отстояния Δyi двух изображений звезды - аналогично использованному авторами в макете телевизионному координатору аппаратуры "Спика-С" ЯЮ1.510.002. Блок вычисления астрономических координат 15 при одновременном поступлении на него вертикальных угловых отстояний Δyi на данный момент ti (датчик времени 5 подключен к блоку 15) и угла наклона зеркала в плоскости визирования δi с основного датчика наклона формирует по данной звезде линейное уравнение вида
где
Δϕ,Δλ - искомые поправки астрономических координат к их расчетным значениям ϕo,λo;
Ai, Zpi - расчетные значения азимутов и зенитных расстояний звезды на момент ti;
Zэ - эталонное зенитное расстояние призмы астролябии;
Δz - систематическая ошибка астролябии;
m - поправка за масштаб отсчета в поле зрения.
Расчетные значения зенитных расстояний и азимутов звезд вычисляются по известным формулам, приведенным, например, в "Астрономическом ежегоднике СССР". -Л. : Наука, 1982 (или др. годы) или в книге: Ж.Меес "Астрономические формулы для калькуляторов".-М.: Мир, 1988 г. Значения ϕo,λo вводятся заранее, они всегда известны.
Таким образом, измеряются величины Δ yi, δi, а вычислению подлежат Δϕ,Δλ,m,Δz, из которых потребителя интересуют лишь две первые величины. Решение системы управлений (1) осуществляется в блоке 15 по методу наименьших квадратов после формирования совокупности подобных уравнений по серии звезд, расположенных на разных азимутах. Из уравнения (1) следует, что для решения задачи необходимо минимум 4 звезды.
На практике быстродействие предлагаемого устройства позволяет затрачивать не более 10 с на одну звезду и с учетом времени перенаведения и поля зрения набирать информацию от 40 звезд за 1 час работы.
Эффективность предлагаемого устройства подтверждена авторами испытанием действующего макета, разработанного в ходе выполнения предприятием ЦНИИ "Электроприбор" НИР "Метель". Эффективность заключается в возможности использования устройства в высоких широтах, с качающегося основания (ледовое поле) и с указанным выше высоким быстродействием.
Погрешность измерений по 40 звездам составила около 1 угл. сек.
Предлагаемое устройство будет внедрено в разработку ЦНИИ "Электроприбор".
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКИХ КООРДИНАТ АСТРОЛЯБИЕЙ | 1989 |
|
RU2107895C1 |
| Устройство измерения высоты небесных светил | 2022 |
|
RU2794558C1 |
| АЛЬТИМЕТРИЧЕСКИЙ СПОСОБ ВЫПОЛНЕНИЯ МОРСКОЙ ВЫСОТОМЕТРИИ С ОПРЕДЕЛЕНИЕМ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2727584C1 |
| Устройство определения астрономического азимута | 2023 |
|
RU2800187C1 |
| Фотоэлектрическое приемное устройство астрометрического инструмента | 1990 |
|
SU1775605A1 |
| Визуально-фотоэлектрическая приставка к астрономо-геодезическому теодолиту | 1978 |
|
SU771600A1 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКОГО АЗИМУТА | 2007 |
|
RU2347252C1 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ АСТРОНОМИЧЕСКИХ КООРДИНАТ ОБЪЕКТА | 2017 |
|
RU2654932C1 |
| Способ измерения уклонений отвесной линии и устройство для его реализации | 2020 |
|
RU2750999C1 |
| ГРАВИМЕТРИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ В ОКЕАНЕ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2007 |
|
RU2348009C1 |
Устройство для определения астрономических координат относится к области астрономо-геодезических измерений. Устройство для определения астрономических координат содержит призменную астролябию-эталонную призму, объектив, горизонтальное зеркало, установленное на поворотной платформе, и датчик времени, а также телевизионный датчик, установленный в фокальной плоскости астролябии, основной и дополнительный датчики наклона, вычислительное устройство, содержащее блок вычисления взаимных угловых отстояний двух изображений звезды, пороговое устройство, блок преобразования координат, блок коммутации двигателей, инвертор, блок вычисления астрономических координат. Основание всего устройства установлено на трех "ногах", одна из которых жестко связана с основанием, а две другие через редуктор соответственно связаны каждый со своим двигателем. Изобретение обеспечивает возможность использования устройства в высоких широтах с качающегося основания (ледовое поле или железнодорожная платформа) и повысить быстродействие устройства. 1 ил.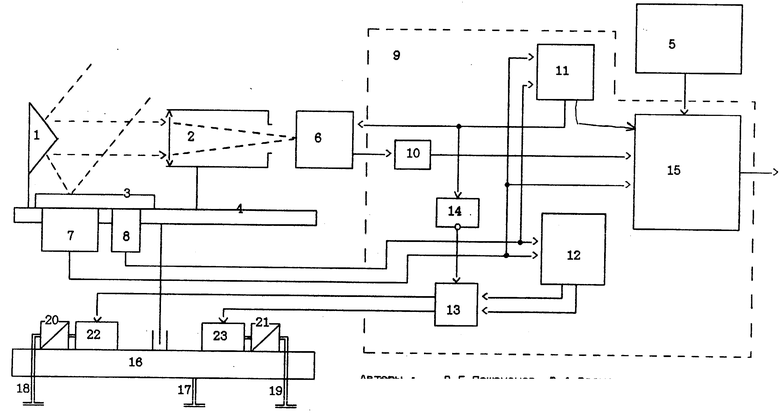
Устройство для определения астрономических координат, содержащее призменную астролябию с горизонтальным зеркалом, установленную на платформе, и датчик времени, отличающееся тем, что, с целью сокращения времени, а также обеспечения возможности измерений в высоких широтах и с подвижных объектов, в него введены телевизионный датчик, установленный в фокальной плоскости астролябии, основной и вспомогательный датчики наклона, жестко соединенные с горизонтальным зеркалом, причем оси чувствительности каждого из них лежат в плоскости горизонта, ортогональны друг другу, а ось чувствительности основного датчика перпендикулярна плоскости визирования, блок вычисления взаимных угловых отстояний двух изображений звезд, анализатор положения зеркала, блок преобразования координат, блок коммутации, инвертор и блок вычисления астрономических координат, при этом выходы каждого датчика наклона соединены со входами блока преобразования координат и анализатора положения зеркала, выход основного датчика наклона дополнительно подключен к входу блока вычисления астрономических координат, выход телевизионного датчика подключен к входу блока вычисления взаимных угловых отстояний двух изображений звезд, выход которого и выход датчика времени подключены к входу блока вычисления астрономических координат, а выход анализатора положения зеркала соединен с телевизионным датчиком, инвертором и блоком вычисления астрономических координат, при этом устройство установлено на основании, расположенном на трех опорах, одна из которых жестко связана с основанием, а две другие снабжены двигателями, соединенными через блок коммутации с выходами блока преобразования координат и инвертора.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Красовцев Б.Н | |||
| Мореходная астрономия | |||
| М.: Транспорт, 1978 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Астрономический ежегодник СССР | |||
| -Л.: Наука, 1982 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Дж.Койлер и др | |||
| Телескопы | |||
| -М.: Иностранная литература, 1963, с | |||
| Подъемник для выгрузки и нагрузки барж сплавными бревнами, дровами и т.п. | 1919 |
|
SU149A1 |

