Предлагаемая система относится к области радиофизики и может быть использована для контроля за солнечной, геомагнитной и сейсмической активностью, предвестников землетрясений, извержений вулканов, цунами, процессов грозовой активности, динамики мощных циклонов, а также для обнаружения ядерных и иных крупных взрывов и пожаров, больших аварийных выбросов на атомных электростанциях, запусков космических аппаратов и ракет, излучений мощных радиопередающих комплексов радиолокационного и связного назначения, средств специального воздействия на ионосферу с целью управления ее параметрами и т.п.
Известны способы и устройства для определения направления прихода и скорости перемещения ионосферных возмущений естественного и техногенного характера (авт. свид. СССР №№1.451.688, 1.709.263; патенты РФ №№2.003.136, 2.085.965, 2.189.051, 2.189.052, 2.193.495, 2.267.139, 2.379.709, 2.560.094; патенты США №№4.761.650, 6.061.013; патент ЕР №0.622.639; патент WO №0.045.192; Afraimovich E.L., Kosogorov Е.А., Perevalova N.P. The use of GPS arrays in defecting shoch-acoustic waves generated during rocket launchings. J. Atmos. Solar-Terr. Phys., V. 63, 1941-1957, 2001 и другие).
Из известных систем и устройств наиболее близкой к предлагаемой является система, реализующая «Способ определения скорости распространения и направления прихода ионосферного возмущения» (патент РФ №2.560.094, G01S 13/95, 2013), которая и выбрана в качестве прототипа.
Известная система обеспечивает повышение чувствительности обнаружения и точности определения скорости распространения и направления прихода ионосферного возмущения решеткой приемных станций спутниковых радионавигационных систем ГЛОНАСС/GPS путем восстановления пространственного распределения полного электронного содержания ионосферы по данным радиопросвечивания атмосферы сигналами ГЛОНАСС/GPS.
Система содержит спутниковые радионавигационные системы ГЛОНАСС/GPS и протяженную решетку двухчастотных приемников, обеспечивающих прием и обработку сигналов.
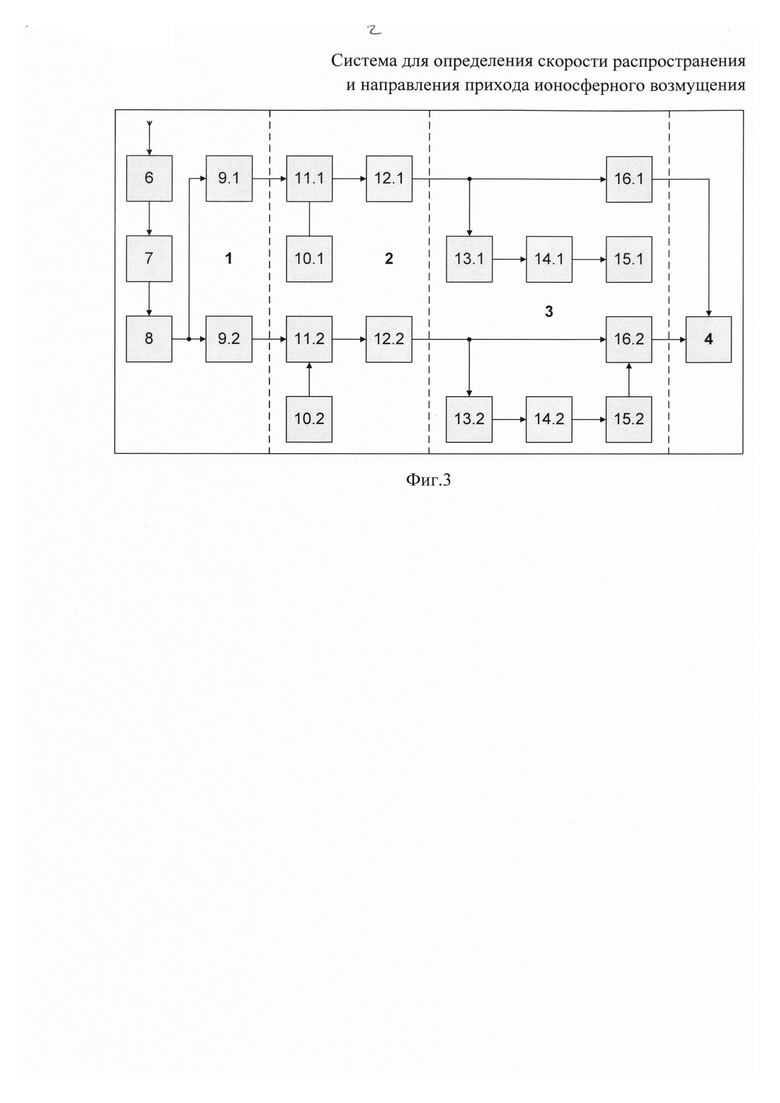
Каждый двухчастотный приемник содержит последовательно включенные приемный тракт 1, преобразователь частоты 2, демодулятор фазоманипулированных (ФМ) сигналов 3 и блок регистрации и анализа 4 (фиг. 3).
Преобразователь частоты 3 построен по супергетеродинной схеме, в которой одно и то же значение промежуточной частоты ωпр может быть получено при приеме сигналов на частотах ωС1, ωЗ1, ωС2, ωЗ2, т.е. ωпр=ωС1-ωГ1; ωпр=ωГ1-ωЗ1, ωпр=ωС2-ωГ2; ωпр=ωГ1-ωЗ2.
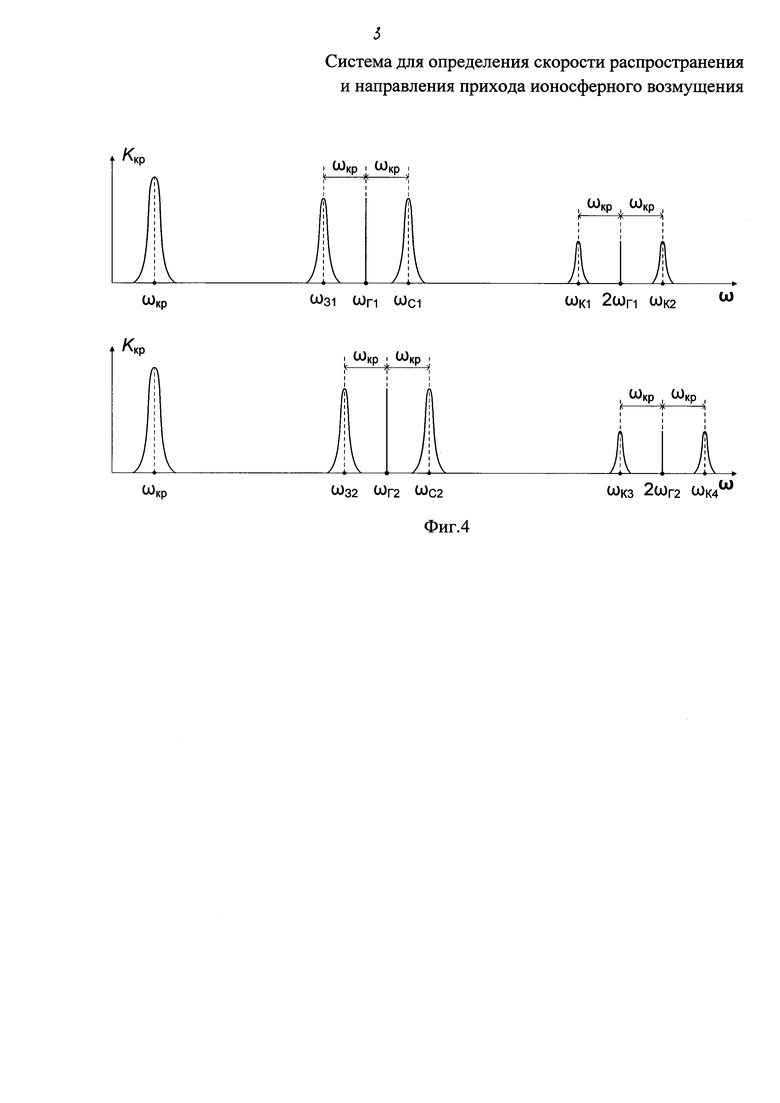
Следовательно, если частоты настройки ωС1 и ωС2 принять за основные каналы приема, то наряду с ними имеют место зеркальные каналы приема, частоты ωЗ1 и ωЗ2 которых расположены симметрично (зеркально) относительно частот гетеродинов ωГ1 и ωГ2 (фиг. 4). Преобразование по зеркальным каналам приема происходит с тем же коэффициентом преобразования Kпр, что и по основным каналам приема. Поэтому они наиболее существенно влияют на избирательность и помехоустойчивость приемников.
Кроме зеркальных, существуют и другие дополнительные (комбинационные) каналы приема. Любой комбинационный канал приема имеет место при выполнении условий:
ωпр=(±m⋅ωKi±n⋅ωГ1),
ωпр=(±m⋅ωKj±n⋅ωГ2),
где ωKi, ωКj - частоты i-го и j-го каналов приема,
m, n, i, j - целые положительные числа.
Наиболее вредными комбинационными каналами приема являются каналы, образующиеся при взаимодействии первых гармоник частот сигналов с гармониками частот гетеродинов малого порядка (второй, третьей), так как чувствительность приемников по этим каналам близка к чувствительности основных каналов приема. Так, четырем комбинационным каналам при m=1 и n=2 соответствуют частоты:
ωК1=2ωГ1-ωпр, ωК2=2ωГ2+ωпр,
ωК3=2ωГ3-ωпр, ωК4=2ωГ4+ωпр.
Наличие ложных сигналов (помех), принимаемых по дополнительным каналам приема, приводит к снижению чувствительности обнаружения и точности определения скорости распространения и направления прихода ионосферного возмущения, регистрируемого двухчастотными приемниками.
Демодулятор ФМ сигналов построен по схеме Пистолькорга А.А., в которой необходимое опорное напряжение выделяется непосредственно из принимаемого ФМ сигнала. При этом отсутствует признак, который позволял бы привязать фазу опорного напряжения к одной из фаз принимаемого ФМ сигнала. Поэтому фаза опорного напряжения под воздействием помех может переходить из одного состояния в другое в случайные моменты времени, что приводит к явлению «обратной работы» и к искажению выделяемого модулирующего кода MCtl.
Наличие явления «обратной работы» также приводит к снижению чувствительности обнаружения и точности определения скорости распространения и направления прихода ионосферного возмущения, регистрируемого двухчастотными приемниками.
Технической задачей изобретения является повышение чувствительности обнаружения и точности определения скорости распространения и направления прихода ионосферного возмущения, регистрируемого двухчастотными приемниками путем подавления ложных сигналов (помех), принимаемых по дополнительным каналам, и устранения явления «обратной работы».
Поставленная задача решается тем, что система для определения скорости распространения и направления прихода ионосферного возмущения, содержащая, в соответствии с ближайшим аналогом, спутниковые радионавигационные системы ГЛОНАСС/GPS и протяженную решетку двухчастотных приемников, обеспечивающих прием и обработку сложных сигналов с фазовой манипуляцией, при этом каждый двухчастотный приемник содержит последовательно включенные приемный тракт, преобразователь частоты, демодулятор сложных сигналов с фазовой манипуляцией и блок регистрации, приемный тракт содержит последовательно включенные приемную антенну, входной фидер, широкополосный фильтр-преселектор, малошумящий усилитель и два полосовых фильтра, преобразователь частоты содержит первый и второй смесители, подключенные к выходу первого и второго полосовых фильтров соответственно, вторые входы которых соединены с первыми выходами первого и второго гетеродинов соответственно, демодулятор сложных сигналов с фазовой манипуляцией содержит первый и второй фазовые детекторы, отличается от ближайшего аналога тем, что она снабжена двумя фильтрами нижних частот, двумя перемножителями и двумя фазовращателями на 90°, причем к выходу первого смесителя последовательно подключены первый фильтр нижних частот, первый перемножитель, второй вход которого соединен с выходом первого полосового фильтра, и первый фазовый детектор, второй вход которого через первый фазовращатель на 90° соединен со вторым выходом первого гетеродина, а выход подключен к управляющему входу первого гетеродина, выход первого фильтра нижних частот подключен к первому входу блока регистрации, к выходу второго смесителя последовательно подключены второй фильтр нижних частот, второй перемножитель, второй вход которого соединен с выходом второго полосового фильтра, и второй фазовый детектор, второй вход которого через второй фазовращатель на 90° соединен со вторым выходом второго гетеродина, а выход подключен к управляющему входу второго гетеродина, выход второго фильтра нижних частот подключен ко второму входу блока регистрации, частоты ωГ1 и ωГ2 первого и второго гетеродинов выбраны равными частотам ωС1 и ωС2 принимаемых сигналов ωГ1=ωС1 и ωГ2=ωС2 и указанные равенства поддерживаются автоматически.
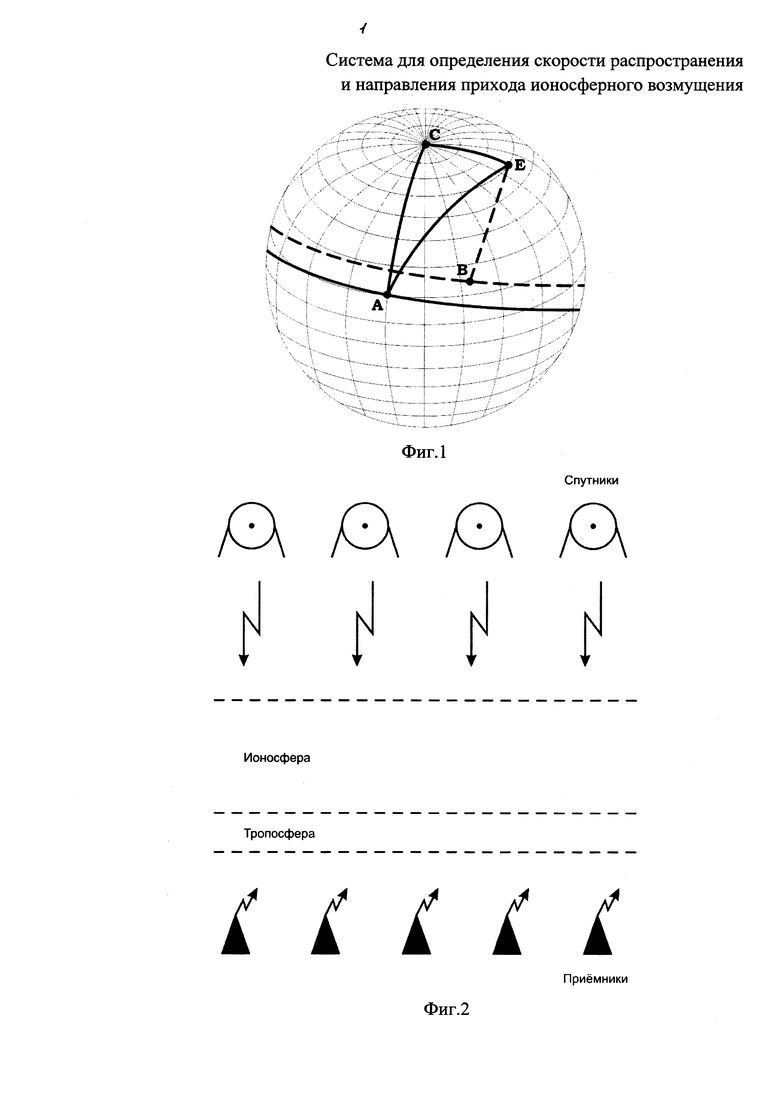
Геометрия определения координат удаленного точечного источника ионосферного возмущения представлена на фиг. 1. Схема радиопросвечивания атмосферы показана на фиг. 2. Структурная схема базового двухчастотного приемника представлена на фиг. 3. Частотные диаграммы, поясняющие образование дополнительных каналов приема, показаны на фиг. 4. Структурная схема предлагаемого двухчастотного приемника изображена на фиг. 5.
Базовый двухчастотный приемник содержит последовательно включенные приемный тракт 1, преобразователь частоты 2, демодулятор сложных сигналов с фазовой манипуляцией 3 и блок регистрации 4.
Приемный тракт 1 содержит последовательно включенные приемную антенну 5, входной фидер 6, широкополосный фильтр-преселектор 7, малошумящий усилитель 8 и два полосовых фильтра 9.1 и 9.2. Преобразователь частоты 2 содержит последовательно подключенные к выходу первого 9.1 (второго 9.2) полосового фильтра первого смесителя 11.1 (второго смесителя 11.2), второй вход которого соединен с первым выходом первого гетеродина 10.1 (второго гетеродина 10.2) и первого усилителя 12.1 (второго усилителя 12.2) промежуточной частоты. Демодулятор сложных сигналов с фазовой манипуляцией содержит последовательно подключенные к выходу первого усилителя 12.1 (второго усилителя 12.2) промежуточной частоты первого удвоителя фазы 13.1 (второго удвоителя фазы 13.2), первого делителя фазы 14.1 на два (второго делителя фазы 14.2 на два), первого узкополосного фильтра 15.1 (второго узкополосного фильтра 15.2), первого фазового детектора 16.1 (второго фазового детектора 16.2), второй вход которого соединен с выходом первого усилителя промежуточной частоты 12.1 (второго усилителя промежуточной частоты 12.2), а выход подключен к первому (второму) входу блока 4 регистрации.
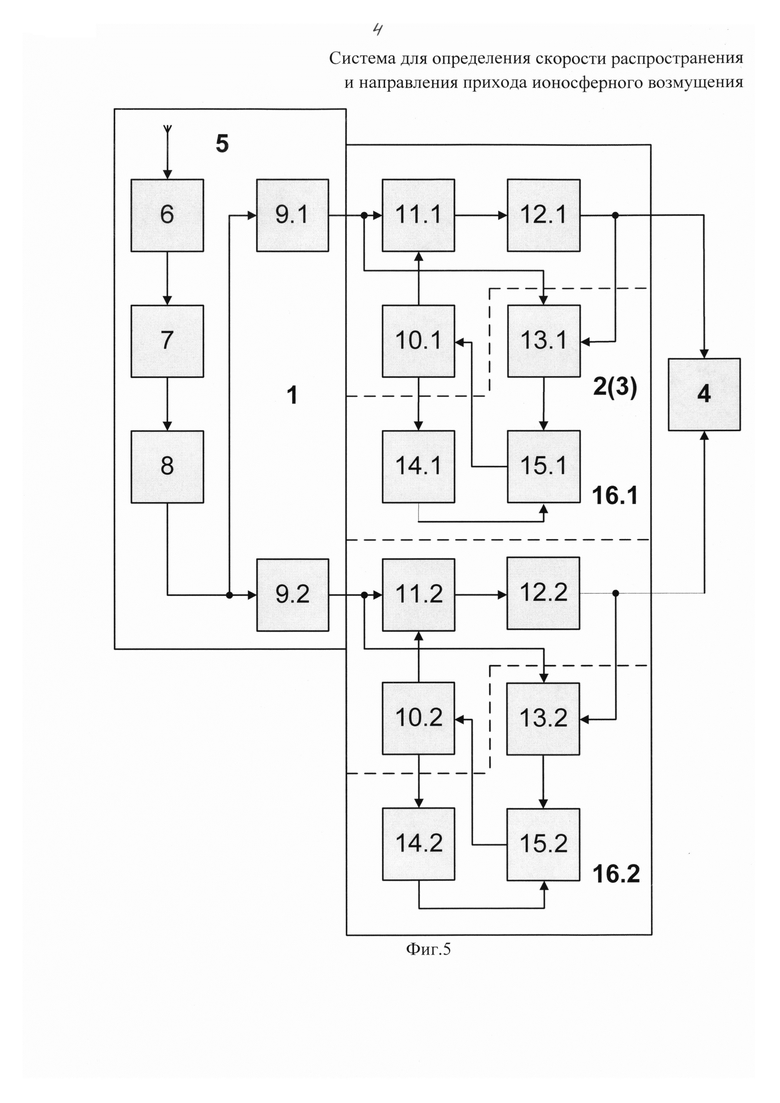
Предлагаемый двухчастотный приемник содержит последовательно включенные приемную антенну 5, входной фидер 6, широкополосный фильтр-преселектор 7, малошумящий усилитель 8, полосовой фильтр 9.1 (9.2), смеситель 11.1 (11.2), второй вход которого соединен с первым выходом гетеродина 10.1 (10.2), фильтр нижних частот 12.1 (12.2), перемножитель 13.1 (13.2), второй вход которого соединен с выходом полосового фильтра 9.1 (9.2), и фазовый детектор 15.1 (15.2), второй вход которого через фазовращатель 14.1 (14.2) соединен со вторым выходом гетеродина 10.1 (10.2), а выход подключен к управляющему входу гетеродина 10.1 (10.2).
Система для определения скорости распространения и направления прихода ионосферного возмущения работает следующим образом.
Система содержит спутниковые радионавигационные системы ГЛОНАСС/GPS и протяженную решетку двухчастотных приемников, обеспечивающих прием и обработку сложных сигналов с фазовой манипуляцией (ФМ).
Спутниковые радионавигационные системы ГЛОНАСС/GPS состоят из трех частей: космической, наземной и пользовательского оборудования.
Космическая часть - это 24 спутника, вращающихся по 6 орбитам. Наклон орбит к земному экватору - 55°, угол между плоскостями орбит - 60°, высота орбит 20180 км, период обращения 12 ч, мощность спутникового передатчика 50 Вт. Спутники GPS способны, передвигаясь, заполнять бреши в системе, если один из них вышел из строя. Важным элементом спутника являются атомные часы, рубидиевые и цезиевые, по четыре на каждом. Спутники идентифицируются номером PRN (Pseudo Random Number), который отображается на приемнике GPS.
За спутниками тщательно следят с помощью наземного сегмента управления - станции управления и слежения. В задачи последнего входит техническое обслуживание орбитальной системы, определение системного времени, предвычисление элементов орбит спутника (эфемерид), моделирование поведения часов спутника, передача навигационных данных спутника и их загрузка в память спутников.
В качестве пользовательского оборудования используются двухчастотные приемники спутниковой радионавигационной системы ГЛОНАСС/GPS.
Все частоты в системе кратны основной частоте часов спутника, 10,23 МГц. Спутник передает на двух частотах ƒ1=1575,42 и ƒ2=1227,6 МГц специальный навигационный сигнал в виде бинарного фазоманипулированного сигнала. В сигнале зашифровываются два вида кода. Один из них код С/А - доступен широкому кругу потребителей. Он позволяет получать лишь приблизительную оценку местоположения, поэтому называется «грубым» кодом. Передача кода С/А осуществляется на частоте ƒ1 с использованием фазовой манипуляции псевдочастотной последовательности длиной 1023 символа. Защита от ошибок обеспечивается с помощью кода Гоулда. Период повторения С/A-кода - 1 мс, тактовая частота - 1,023 МГц.
Другой код - Р обеспечивает более точное вычисление координат, но пользоваться им способны не все, доступ к нему ограничивается провайдером услуг GPS. Этот код передается на частоте ƒ2 с применением сверхдлинной псевдослучайной последовательности с периодом повторения 267 дней. Тактовая частота - 10,23 МГц.
Радиопросвечивание атмосферы с помощью сигналов спутниковых радионавигационных систем и семи наземных станций является легкодоступным и не требующим больших затрат способом мониторинга ее параметров в реальном времени.
Просвечивание атмосферы двухчастотными радиосигналами ГЛОНАСС/GPS основано на существовании явления дисперсии радиоволн микроволнового диапазона в атмосфере Земли.
Полное микрофизическое содержание вдоль луча визирования от фазового центра антенны приемника на антенну передатчика пропорционально разности набегов фазы на двух частотах. Учитывая, что фазовая скорость равна по знаку и противоположна по величине групповой скорости, микрофизическое содержание пропорционально разности псевдодальности, определяемой из навигационных сигналов на двух частотах. Однако для фазовых измерений микрофизическое содержание может быть определено лишь с точностью до постоянной (в пределах одного сеанса) константы. Стоит отметить также, что измерения сдвига фазы на несколько порядков точнее кодовых измерений псевдодальности, поэтому для определения абсолютного микрофизического содержания целесообразно использовать кодовые и фазовые измерения совместно.
Многолучевость появляется в результате вторичных отражений сигнала спутника от крупных препятствий, расположенных в непосредственной близости от приемника. При этом возникает явление интерференции, и измерить расстояние достаточно трудно, а наилучшим способом борьбы с нею считается рациональное размещение приемника относительно препятствий. В результате воздействия этого фактора ошибки определения псевдодальности могут увеличиться на 2 м.
Ионосфера - это ионизированный атмосферный слой в диапазоне высот 50-500 км, который содержит свободные электроны. Наличие этих электронов вызывает задержку распространения сигнала спутника, которая прямо пропорциональна концентрации электронов и обратно пропорциональна квадрату частоты радиосигнала.
Для вычисления ионосферной поправки используется измерение псевдодальности на Р-коде на двух частотах:

где  ,
,
ƒ1 и ƒ2 - частоты сигналов GPS,
Dp2, Dp1 - измерение псевдодальности на Р-коде на частотах ƒ1 и ƒ2 соответственно.
Ионосферная поправка псевдодальности устраняет систематическую ошибку порядка 5 метров в определении вектора положения покоящегося наблюдателя.
Тропосфера - самый нижний слой атмосферы (до высоты 8-13 км). Она также обуславливает задержку распространения радиосигнала от спутника. Задержка сигнала в тропосфере также вызвана эффектами рефракции. В отличие от ионосферной задержки тропосферная задержка не зависит от частоты сигнала, она зависит от метеорологических параметров (давления, температуры, влажности), а также от высоты спутника над горизонтом. Для вычисления тропосферной поправки измерения псевдодальности используют измерения температуры, давления воздуха и парциального давления водяного пара. Эти измерения доступны в сети Internet для каждой базовой GPS станции.
Соотношение для вычисления тропосферной поправки псевдодальности наземного наблюдателя имеет вид:

где Т - температура [К];
Р - давление воздуха [мб];
В - парциальное давление водяного пара [мб];
θ - зенитный угол направления на НКА.
Тропосферные задержки вызывают ошибки измерения псевдодальности в 1 м.
Наиболее эффективным средством исключения ошибок является дифференциальный способ наблюдений. Его суть состоит в выполнении измерений двумя приемниками: один устанавливается в определяемой точке, а другой - в точке с известными координатами - базовой (контрольной) станции. В дифференциальном режиме измеряют не абсолютные координаты первого приемника, а его положение относительно базового (вектор базы). Использование дифференциального режима позволяет довести точность кодовых измерений до десятков сантиметров, а фазовых - до единиц миллиметров.
Определение значения полного электронного содержания (ПЭС) ионосферы осуществляется по двухчастотным измерениям дальности между навигационным спутником и наземным приемником

где ƒ1=1575,42 МГц, ƒ2=1227,6 МГц, λ1, λ2 - частоты и длины волн навигационных сигналов:
L1λ1, L2λ2 - фазовый путь трансионосферных радиосигналов (L1, L2 - число полных оборотов фазы);
θ - зенитный угол луча «приемник-навигационный спутник».
Совокупность лучей «приемник-навигационный спутник» в заданном регионе образует приемную решетку, каждый i-й элемент которой в момент времени t характеризуется изменением значения ПЭС Yi(t) и положением соответствующей ионосферной точки (Xi(t), Yi(t), Zi(t)). Временные ряды ПЭС отражают как регулярные изменения ПЭС в точке регистрации, так и вариации ПЭС, вызванные ионосферными возмущениями различного характера.
Для выделения характерных ионосферных возмущений ряды ПЭС подвергаются процедуре специальной фильтрации в диапазоне периодов, соответствующих масштабу возмущения.
Обнаружение и определение пространственно-временных параметров ионосферного возмущения осуществляется путем последовательной проверки гипотез о значениях направления прихода и скорости распространения ионосферного возмущения.
Для каждой пары проверяемых значений (α, V) формируется диаграмма направленности приемной решетки и соответствующим образом ориентируется в фазовом пространстве [α, V] за счет синфазного суммирования отдельных рядов ΔYi(t) приемной решетки к некоторому нейтральному ряду ΔY0(t), выбранному в качестве опорного, с временными сдвигами τi и формировании выходного сигнала приемной решетки:

где Р - количество элементов приемной решетки.
Временной сдвиг τi определяется как разность времени tj j-го отсчета i-го суммарного ряда ПЭС и времени t0 регистрации ионосферного возмущения центральным элементом приемной решетки τi=tj-t0 и выбирается исходя из минимизации выражения, описывающего динамику распространения возмущения:

где Δpi - расстояние, пройденное фронтом волны между i-м и центральным элементом приемной решетки.
Для протяженных приемных решеток расстояние Δpi. рассчитывается с учетом кривизны Земли. С этой целью в заданном направлении α прихода волны ионосферного возмущения на высоте hmax задается удаленный точечный источник (обозначен точкой Е на фиг. 1), который будет являться полюсом ортодромической системы координат, экватор которой (жирная линия на фиг. 1) проходит через центральный элемент приемной решетки (точка А на фиг. 1). Тогда фронт волны, распространяющийся от удаленного точечного источника и приходящий через i-й элемент приемной решетки (точка В на фиг. 1), будет представлять собой широтный круг (жирная прерывистая линия), параллельный экватору полученной ортодромической системы. Такая модель соответствует плоской волне ионосферного возмущения, распространяющейся на сфере Земли.
Геоцентрические координаты (Хe, Ye, Ze) удаленного источника ионосферного возмущения определяются с использованием правил сферической тригонометрии. При этом рассматриваются сферический треугольник, вершиной А которого является центральный элемент приемной решетки с известными координатами (Х0, Y0, Z0).
Вершиной С этого треугольника является северный полюс геоцентрической системы координат (0, 0, R + hmax), где R - радиус Земли. Необходимо определить координаты третьей вершины Е, которая и будет являться удаленным источником. Чтобы удаленный источник Е являлся полюсом ортодромической системы координат, угловой размер стороны АЕ сферического треугольника задается равным π/2. В полученном сферическом треугольнике известны две стороны АС и АЕ, а также угол между ними <LCAE=α, что является типовой задачей решения сферического треугольника. С использованием теоремы косинусов в сферическом треугольнике определяется третья сторона и координаты (Хe, Ye, Ze) удаленного источника Е.
Расстояние, пройденное фронтом волны между i-м и центральным элементом приемной решетки, определяется как разность расстояний АЕ и BE (фиг. 1) и записывается в виде:

где (Xi, Yi, Zi) - координаты i-го элемента приемной решетки в момент времени tj.
Решение о правильности проверяемой гипотезы принимается при превышении суммарным сигналом заданного порогового уровня. При этом считается, что обнаружено ионосферное возмущение, а соответствующие значения α и V, для которых суммарный сигнал приемной решетки превысил пороговое значение, считаются оценками направления прихода и фазовой скорости распространения обнаруженного ионосферного возмущения.
Каждый двухчастотный приемник работает следующим образом. Принимаемые ФМ сигналы с приемной антенны 5 поступают во входной фидер 6, который представляет собой четвертьволновой замкнутый на одной стороне отрезок коаксиальной линии и служит для согласования параметров антенны 5 и входных цепей приемника. С выхода фидера 6 ФМ сигналы поступают на вход широкополосного фильтра-преселектора 7, который служит / для ограничения полосы частот принимаемых сигналов в диапазоне 1574,42-1621 МГц. Указанный фильтр, выполненный на микроволновых линиях, реализует эллиптический полосовой фильтр Кауэра 5-го порядка. Широкополосный фильтр-преселектор 7 обладает важным достоинством, а именно практически линейной фазовой характеристикой в полосе пропускания фильтра, что является большим преимуществом при работе со сложными ФМ сигналами, передаваемыми со спутников. Это приводит, например, к тому, что фильтр-преселектор 7 имеет одинаковое линейное время группового запаздывания τ в полосе пропускания, равное примерно 2,5 не. Такая реализация приводит к тому, что нет необходимости использовать специальный калибратор для обеспечения одинакового времени группового запаздывания τ для всех сигналов, принимаемых от спутников.
С выхода фильтра-преселектора 7 ФМ сигналы поступают на вход малошумящего усилителя 8, который выполнен на основе арсенид-галлиевых транзисторов с барьером Шоттки и обеспечивает основное усиление приемного тракта 1.
С выхода малошумящего усилителя 8 ФМ сигналы поступают на входы полосовых фильтров 9.1 и 9.2, которые выделяют их:
UC1(t)=UC1⋅cos[(ωC1±ΩД1)t+ϕK1(t)+ϕC1],
UC2(t)=UC2⋅cos[(ωC2±ΩД2)t+ϕK2(t)+ϕC2],
где UC1, UC2, ωC1, ωC2, ϕC1, ϕC2, TC - амплитуды, несущие частоты, начальные фазы и длительность сигналов;
0≤t≤ТC;
±ΩД1, ±ΩД2 - доплеровские смещения частоты;
ϕK1(t)={0, π}, ϕК2(t)={0, π} - манипулированные составляющие фаз, отображающие законы фазовой манипуляции в соответствии с модулирующими кодами М1(t) и М2(t) соответственно.
Указанные ФМ сигналы поступают на первые входы гетеродинов 11.1 и 11.2, на вторые входы которых подаются напряжения гетеродинов 10.1 и 10.2:
UГ1(t)=UГ1⋅cos(ωГ1t±ϕГ1),
UГ2(t)=UГ2⋅cos(ωГ2t±ϕГ2).
На выходах смесителей 11.1 и 11.2 образуются напряжения комбинационных частот:
UΣ1(t)=UH1⋅cosϕК1(t)+UH1⋅cos[(2ωГ1±Ωд1)t+ϕК1(t)+2ϕС1],
UΣ2(t)=UH2⋅cosϕК2(t)+UН2⋅cos[(2ωГ2±Ωд2)t+ϕК2(t)+2ϕС2],
где  ,
,
 .
.
Фильтрами 12.1 и 12.2 нижних частот выделяются низкочастотные напряжения (напряжения нулевой частоты)
 ,
,
 , 0≤t≤TC,
, 0≤t≤TC,
пропорциональные модулирующим кодам М1(t) и М2(t) соответственно.
Эти напряжения фиксируются блоком регистрации 4. Частоты ωГ1 и ωГ2 гетеродинов выбираются равными частотам ωС1 и ωС2 принимаемых ФМ сигналов: ωГ1=ωС1, ωГ2=ωС2. Это обеспечивает совмещение двух процедур: преобразование принимаемых ФМ сигналов на нулевую частоту и выделение низкочастотных напряжений UH1(t) и UH2(t), пропорциональных модулирующим кодам M1(t) и M2(t), т.е. синхронное детектирование принимаемых ФМ сигналов с помощью гетеродина 10.1, смесителя 11.1, фильтра 12.1 нижних частот и гетеродина 10.2, смесителя 11.2, фильтра 12.2 нижних частот. Такие схемные конструкции позволяют избавиться от дополнительных каналов приема (зеркальных каналов на частотах ωЗ1 и ωЗ2, комбинационных каналов на частотах ωК1, ωК2, ωК3, и ωК4).
Так как частоты ωС1 и ωС2 принимаемых ФМ сигналов могут изменяться под воздействием различных дестабилизирующих факторов, в том числе и эффекта Доплера (±Ωд1, ±Ωд2), то для выполнения и поддержания равенств ωГ1=ωС1, ωГ2=ωС2 используются системы фазовой автоподстройки частоты (ФАПЧ) 16.1 и 16.2, состоящие из перемножителя 13.1, фазовращателя 14.1 на 90°, фазового детектора 15.1 и перемножителя 13.2, фазовращателя 14.2 на 90°, фазового детектора 15.2.
Таким образом, предлагаемая система по сравнению с прототипом и другими техническими решениями аналогичного назначения обеспечивает повышение чувствительности обнаружения и точности определения скорости распространения и направления прихода ионосферного возмущения, регистрируемого двухчастотными приемниками. Это достигается за счет подавления ложных сигналов (помех), принимаемых по дополнительным каналам, и устранения явления «обратной работы» с помощью простых схемных конструкций, которые обладают новизной, оригинальностью и могут найти широкое практическое применение.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2016 |
|
RU2624634C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2337388C1 |
| Способ материально-технического обеспечения управления местоположением транспортного средства при восстановлении объектов инфраструктуры и система для его реализации | 2019 |
|
RU2724079C1 |
| СПОСОБ СИНХРОНИЗАЦИИ ЧАСОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2016 |
|
RU2622511C1 |
| Способ транспортировки твердых коммунальных отходов с управлением местоположением транспортного средства и система его реализации | 2022 |
|
RU2773736C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ | 2012 |
|
RU2507555C2 |
| ПРИЕМНИК СИГНАЛОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ ГЛОНАСС И НАВСТАР | 2011 |
|
RU2480907C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2008 |
|
RU2379709C1 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ | 2005 |
|
RU2301437C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2013 |
|
RU2560094C2 |
Изобретение относится к области радиофизики и может быть использовано для контроля за солнечной, геомагнитной и сейсмической активностью, предвестников землетрясений, извержения вулканов, цунами, процессов грозовой активности, динамики мощных циклонов, а также для обнаружения ядерных и иных крупных взрывов и пожаров, больших аварийных выбросов на атомных электростанциях, запусков космических аппаратов и ракет, излучений мощных радиопередающих комплексов радиолокационного и связного назначения, средств специального воздействия на ионосферу с целью управления ее параметрами. Достигаемый технический результат - повышение чувствительности обнаружения ионосферного возмущения. Указанный результат достигается за счет того, что система для регистрации ионосферного возмущения содержит спутниковые радионавигационные системы ГЛОНАСС/GPS и протяженную решетку двухчастотных приемников, обеспечивающих прием и обработку сложных сигналов с фазовой манипуляцией, при этом каждый двухчастотный приемник содержит приемный тракт, преобразователь частоты, демодулятор сложных фазоманипулированных сигналов, блок регистрации, приемную антенну, входной фидер, широкополосный фильтр-преселектор, малошумящий усилитель, полосовые фильтры, гетеродины, смесители, фильтры нижних частот, перемножители, фазовращатели на 90°, фазовые детекторы, системы фазовой автоподстройки частоты. 5 ил.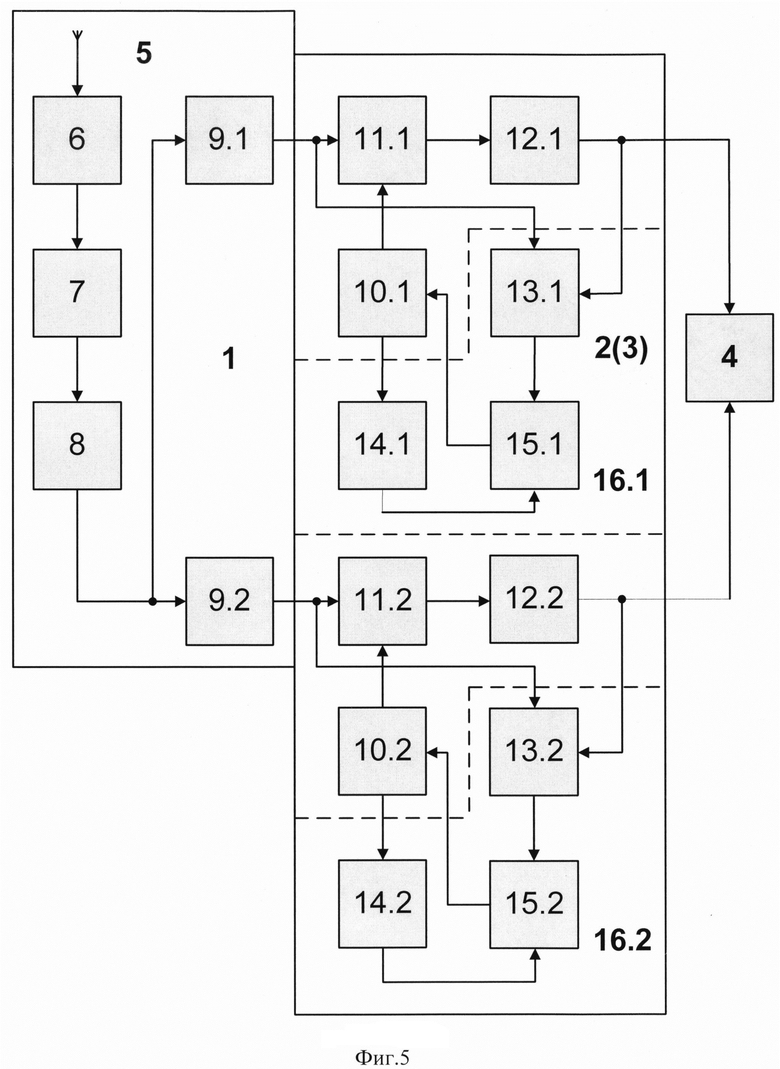
Система для регистрации ионосферного возмущения, содержащая спутниковые радионавигационные системы ГЛОНАСС/GPS и протяженную решетку двухчастотных приемников, обеспечивающих прием и обработку сложных сигналов с фазовой манипуляцией, при этом каждый двухчастотный приемник содержит последовательно включенные приемный тракт, преобразователь частоты, демодулятор сложных сигналов с фазовой манипуляцией и блок регистрации, приемный тракт содержит последовательно включенные приемную антенну, входной фидер, широкополосный фильтр-преселектор, малошумящий усилитель и два полосовых фильтра, преобразователь частоты содержит первый и второй смесители, подключенные к выходу первого и второго полосовых фильтров соответственно, вторые входы которых соединены с первыми выходами первого и второго гетеродинов соответственно, демодулятор сложных сигналов с фазовой манипуляцией содержит первый и второй фазовые детекторы, отличающаяся тем, что она снабжена двумя фильтрами нижних частот, двумя перемножителями и двумя фазовращателями на 90°, причем к выходу первого смесителя последовательно подключены первый фильтр нижних частот, первый перемножитель, второй вход которого соединен с выходом первого полосового фильтра, и первый фазовый детектор, второй вход которого через первый фазовращатель на 90° соединен со вторым выходом первого гетеродина, а выход подключен к управляющему входу первого гетеродина, выход первого фильтра нижних частот подключен к первому входу блока регистрации, к выходу второго смесителя последовательно подключены второй фильтр нижних частот, второй перемножитель, второй вход которого соединен с выходом второго полосового фильтра, и второй фазовый детектор, второй вход которого через второй фазовращатель на 90° соединен со вторым выходом второго гетеродина, а выход подключен к управляющему входу второго гетеродина, выход второго фильтра нижних частот подключен ко второму входу блока регистрации, частоты ωГ1 и ωГ2 первого и второго гетеродинов выбраны равными частотам ωС1 и ωС2 принимаемых сигналов, ωГ1=ωС1 и ωГ2=ωС2, и указанные равенства поддерживаются автоматически.
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2013 |
|
RU2560094C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ РАСПРОСТРАНЕНИЯ И НАПРАВЛЕНИЯ ПРИХОДА ИОНОСФЕРНОГО ВОЗМУЩЕНИЯ | 2008 |
|
RU2379709C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЭПИЦЕНТРАЛЬНОЙ ЗОНЫ ИСТОЧНИКА И СКОРОСТИ РАСПРОСТРАНЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ИОНОСФЕРНЫХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2560525C1 |
| US 4761650 A, 02.08.1988 | |||
| US 2013186127 A, 19.09.2013 | |||
| Устройство для контроля деталей с прерывистыми поверхностями | 1975 |
|
SU622639A1 |
| US 6061013 A, 09.05.2000. | |||

