Предлагаемое устройство относится к медицинской технике, а именно к протезированию и протезостроению.
Известен «Голеностопный узел протеза стопы» по патенту №2137443, кл. A61F 2/66, содержащий каркас с передней и задней опорными площадками и упругий вкладыш в задней части стопы.
Недостатком указанного устройства является то, что после заднего толчка стопа сразу возвращается в исходное положение относительно стойки голени.
Известна бессуставная искусственная стопа по патенту №2168962, кл. A61F 2/66, содержащая в своем основании плоскую пружину и соединенный с ней упругий С-образный вкладыш.
Недостатком указанного устройства является то, что после заднего толчка стопа быстро упруго возвращается в исходное положение относительно стойки голени, не обеспечивая антропоморфного подгибания при ее переносе над опорной поверхностью.
Наиболее близким по функциональной и технической сущности является выбранный авторами в качестве прототипа протез голени по патенту №2482819, кл. A61F 2/66.
Протез голени содержит приемную гильзу, стойку голени, стопу, в которой плоская изогнутая пружина, образует переднюю часть стопы, а заднюю часть стопы дополняет неподвижно соединенная с опорой упругая пластина.
Недостатком указанного устройства является то, что после заднего толчка стопа, выполнив движение тыльного подгибания, замедленно упруго возвращается в исходное положение относительно стойки голени. Если инвалид задержит ногу при согнутом колене, то стопа возвращается в исходное положение, не сохраняя антропоморфного подгибания при ее переносе над опорной поверхностью.
Задачей предлагаемого изобретения является создание надежного протеза ноги, при использовании которого обеспечивается удобство инвалида в процессе ходьбы путем обеспечения возможности в автоматическом режиме, близком к естественному, выполнять тыльное подгибание стопы в процессе ходьбы и продолжать движение при любых пространственных задержках протезированной конечности, сохраняя антропоморфное подгибание при ее переносе над опорной поверхностью.
Для решения указанной задачи в протез голени, который содержит приемную гильзу, стойку голени, стопу, в которой плоская изогнутая пружина образует переднюю часть стопы, а заднюю часть стопы дополняет неподвижно соединенная с опорной поверхностью упругая пластина, предлагается ввести активный исполнительный механизм голеностопного шарнира, содержащий корпус шарнира тыльного подгибания стопы, в котором шарнирно установлен кронштейн стопы посредством неподвижно соединенной с ним оси тыльного подгибания, а также неподвижно соединенный с передней частью стопы, при этом в корпусе установлена самотормозящая муфта обгона двустороннего действия с разрезным диском, обойма которой неподвижно закреплена в корпусе, причем с одной стороны ось тыльного подгибания неподвижно соединена с кулачком муфты, установленным между ее полудисками, а поводок муфты, охватывающий полудиски, неподвижно соединен с выходным валом мотор-редуктора электропривода тыльного подгибания, фланец которого соединен с корпусом, при этом полудиски подпружинены и прижаты к обойме, кроме того, ось тыльного подгибания с другой стороны неподвижно соединена с ротором датчика угла тыльного подгибания, а его статор присоединен к корпусу, причем на приемной гильзе соосно физиологической оси сгибания в колене закреплена ось, шарнирно соединенная с шиной, которая зафиксирована на разъемной манжете бедра, при этом с осью приемной гильзы неподвижно соединен ротор датчика управления тыльным подгибанием, а его статор соединен с шиной, кроме того, предлагается сформировать электронный блок канала управления тыльным подгибанием стопы, в котором датчик управления тыльным подгибанием и датчик обратной связи в виде датчика угла тыльного подгибания предлагается соединить со входом сумматора, на выходе которого подключить первый и второй импульсные преобразователи, соединенные с усилителем мощности, выход которого подключить к мотор-редуктору электропривода тыльного подгибания, соединенного с исполнительным механизмом тыльного подгибания стопы. При этом электронный блок управления и источник электропитания предлагается закрепить на приемной гильзе.
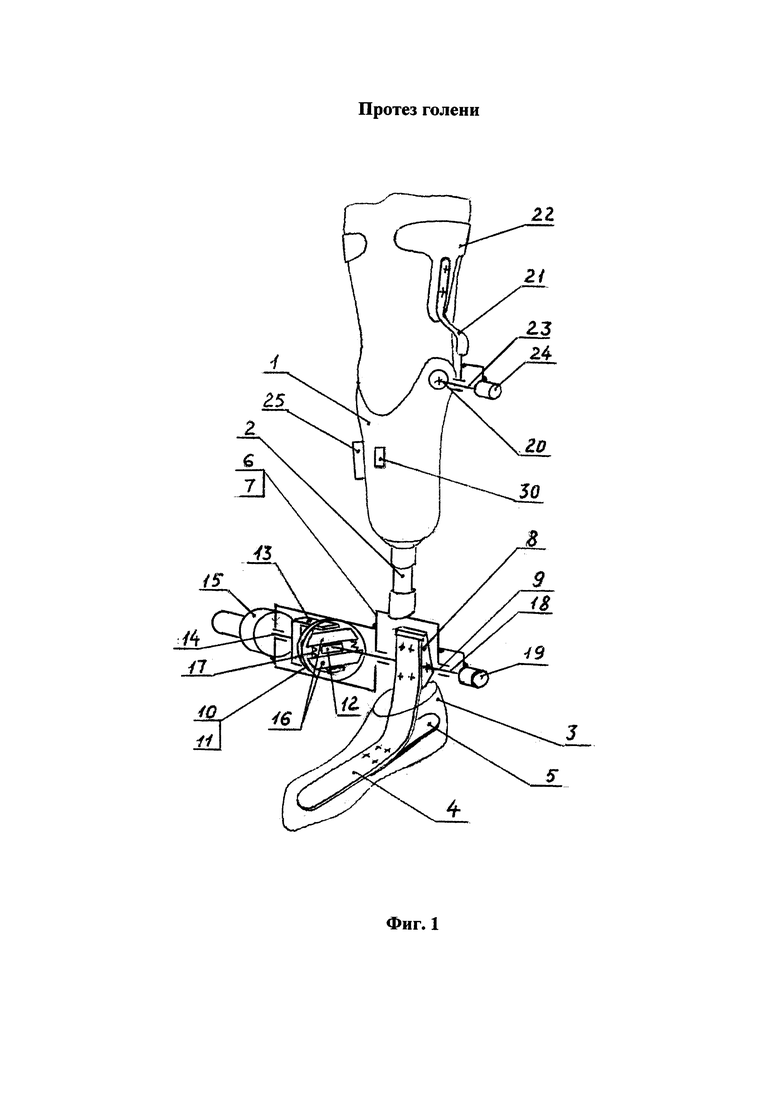
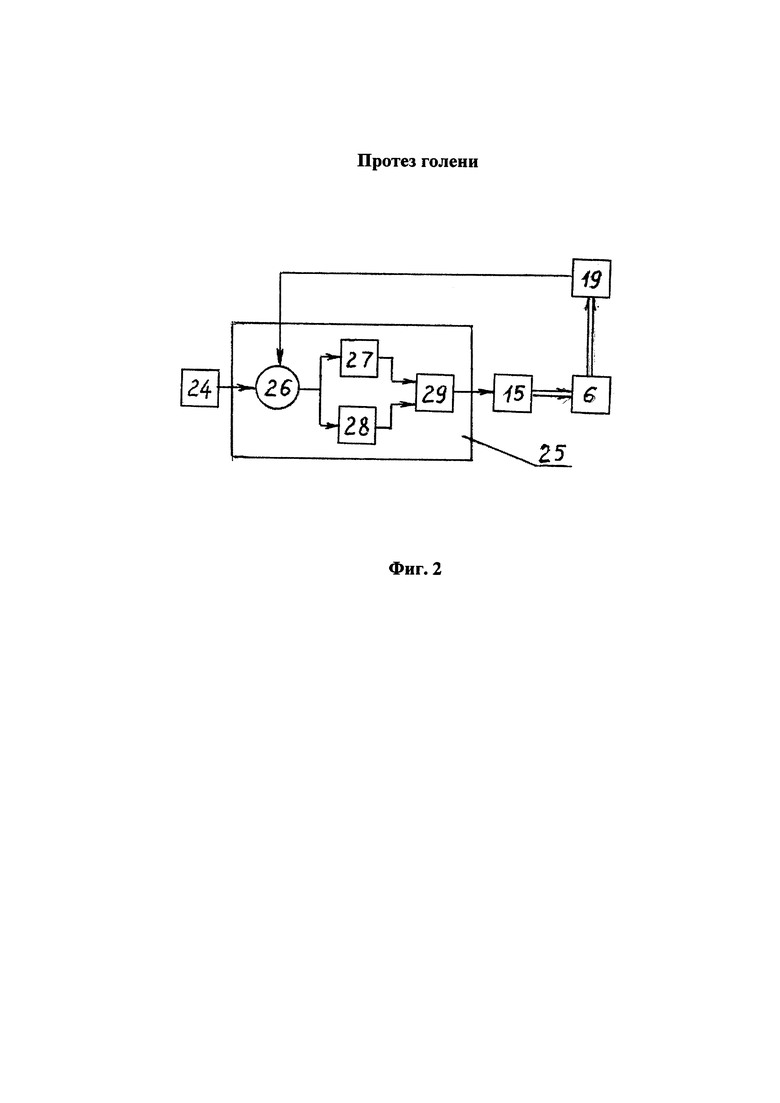
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена конструктивная схема протеза голени с активным исполнительным механизмом голеностопного шарнира, а на фиг. 2 представлена функциональная структурная схема канала управления тыльным подгибанием стопы.
Протез голени содержит приемную гильзу 1, стойку голени 2, стопу 3, в которой плоская изогнутая пружина 4 образует переднюю часть стопы, соединенную с опорной поверхностью упругую пластину 5, активный исполнительный механизм 6 голеностопного шарнира, содержащий корпус 7 шарнира тыльного подгибания, в котором шарнирно установлен соединенный с пружиной 4 кронштейн 8 стопы. Шарнирное соединение обеспечивается посредством неподвижно соединенной с кронштейном 8 оси 9 тыльного подгибания. В корпусе 7 установлена самотормозящая муфта обгона 10 двустороннего действия с разрезным диском, обойма 11 которой закреплена в корпусе 7. С кулачком 12 муфты соединена ось 9 тыльного подгибания, а с поводком 13 муфты соединен выходной вал 14 мотор-редуктора 15, фланец которого соединен с корпусом 7 шарнира тыльного подгибания. При этом полудиски 16 муфты прижаты к обойме 11 пружинами 17. Самотормозящее устройство данной конструкции обеспечивает передачу движения в ту или другую сторону только со стороны мотор-редуктора, а кроме того, обеспечивает высокий коэффициент полезного действия в режиме оттормаживания. В то же время данное устройство выполняет функцию защиты привода от перегрузки в режиме переднего и заднего толчка в процессе ходьбы (А.И. Турпаев. «Самотормозящие механизмы». Москва. «Машиностроение». 1976 г. Стр. 149-153). Ось 9 с другой стороны соединена с ротором 18 датчика угла тыльного подгибания 19, а его статор присоединен к корпусу 7. При этом на приемной гильзе 1 соосно физиологической оси сгибания колена закреплена ось 20, шарнирно соединенная с шиной 21, которая зафиксирована на разъемной манжете 22 бедра, при этом с осью 20 приемной гильзы неподвижно соединен ротор 23 датчика 24 управления тыльным подгибанием, а его статор соединен с шиной 21. Причем датчик управления тыльным подгибанием 24 и датчик обратной связи в виде датчика угла тыльного подгибания 19 соединены с электронным блоком 25, а именно со входом сумматора 26, на выходе которого подключены первый 27 и второй 28 импульсные преобразователи, соединенные с широтно-импульсным усилителем мощности 29, выход которого подключен к мотор-редуктору 15 электропривода тыльного подгибания, соединенного с исполнительным механизмом 6 тыльного сгибания стопы. При этом электронный блок управления 25 и источник электропитания 30 закреплены на приемной гильзе.
Устройство работает следующим образом. В исходном состоянии протезированная конечность выпрямлена. При неподвижной культе голени разность сигналов датчика обратной связи 19 и датчика управления тыльным подгибанием 24 равна нулю (сравнение обеспечивает сумматор 26). После переката на протезированной конечности и заднего толчка бедро идет вперед, а колено сгибается приводя в движение ротор датчика 24 управления тыльным подгибанием, что приводит к рассогласованию исходных сигналов. Разность сигналов, которая получается на выходе сумматора 26, является сигналом управления и может быть положительной или отрицательной в зависимости от направления движения культи голени, изменяя тем самым полярность питания на приводе. Чем больше величина рассогласования, тем больше сигнал управления тыльным сгибанием стопы, который поступает на импульсные преобразователи 27, 28, далее последовательно на широтно-импульсный усилитель мощности 29, мотор-редуктор 15 привода тыльного подгибания стопы, приводящего в движение исполнительный механизм 6 голеностопного шарнира. Мотор-редуктор 15 поворачивает поводок 13 муфты обгона 10, который выводит из контакта с обоймой 11 полудиски 16. Происходит тыльное подгибание стопы. При остановке голени относительно бедра привод доводит устройство до момента согласования сигналов, сигнал управления становится равным нулю и привод останавливается, пружины 17 вводят полудиски в контакт с обоймой 11 и ось 9 с кулачком 12 фиксируется. При воздействии внешней силы на стопу 3 кулачок разжимает полудиски и фиксация усиливается, препятствуя подгибанию стопы. При остановке голени при согнутом колене стопа останавливается и удерживается в подогнутом положении соответственно положению голени относительно бедра.
Положительный эффект заявляемого изобретения заключается в том, что предлагаемое устройство позволяет в автоматическом режиме, близком к естественному, выполнять тыльное подгибание стопы в процессе ходьбы и продолжать движение при любых пространственных задержках протезированной конечности, сохраняя антропоморфное подгибание при ее переносе над опорной поверхностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗ ГОЛЕНИ | 2019 |
|
RU2695948C1 |
| СТЕНД ДЛЯ НАСТРОЙКИ И ИСПЫТАНИЙ МНОГОФУНКЦИОНАЛЬНОГО АКТИВНОГО ПРОТЕЗА ПЛЕЧА | 2019 |
|
RU2729449C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| ПРОТЕЗ ГОЛЕНИ | 2009 |
|
RU2482819C2 |
| ИСКУССТВЕННЫЙ КОЛЕННЫЙ СУСТАВ | 2021 |
|
RU2763255C1 |
| Устройство позиционного очувствления подвижности пальцев искусственной кисти | 2018 |
|
RU2702304C1 |
| УСТРОЙСТВО ДЛЯ СРАВНИТЕЛЬНЫХ ИСПЫТАНИЙ СИСТЕМ УПРАВЛЕНИЯ АКТИВНЫХ МНОГОФУНКЦИОНАЛЬНЫХ ПРОТЕЗОВ ПЛЕЧА РАЗРАБОТЧИКОМ СО ЗДОРОВЫМИ РУКАМИ | 2020 |
|
RU2744657C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| Протез бедра | 1984 |
|
SU1237204A1 |
| ПРОТЕЗ БЕДРА С ВНЕШНИМ ИСТОЧНИКОМ ЭНЕРГИИ | 1991 |
|
RU2007972C1 |
Изобретение относится к медицине. Протез голени содержит приемную гильзу, стойку голени, стопу, в которой плоская изогнутая пружина образует переднюю часть стопы, а заднюю часть стопы дополняет неподвижно соединенная с опорной поверхностью упругая пластина. В протез введен активный исполнительный механизм голеностопного шарнира, содержащий корпус шарнира тыльного подгибания стопы, в котором шарнирно установлен кронштейн стопы посредством неподвижно соединенной с ним оси тыльного подгибания, а также неподвижно соединенный с передней частью стопы. В корпусе установлена самотормозящая муфта обгона двустороннего действия с разрезным диском, обойма которой неподвижно закреплена в корпусе. С одной стороны ось тыльного подгибания неподвижно соединена с кулачком муфты, установленным между ее полудисками, а поводок муфты, охватывающий полудиски, неподвижно соединен с выходным валом мотор-редуктора электропривода тыльного подгибания, фланец которого соединен с корпусом. Полудиски подпружинены и прижаты к обойме, кроме того, ось тыльного подгибания с другой стороны неподвижно соединена с ротором датчика угла тыльного подгибания, а его статор присоединен к корпусу. На приемной гильзе соосно физиологической оси сгибания колена закреплена ось, шарнирно соединенная с шиной, которая зафиксирована на разъемной манжете бедра. С осью приемной гильзы неподвижно соединен ротор датчика управления тыльным подгибанием, а его статор соединен с шиной. В устройство введен электронный блок канала управления тыльным подгибанием стопы, в котором датчик управления тыльным подгибанием и датчик обратной связи в виде датчика угла тыльного подгибания соединены со входом сумматора. На выходе сумматора подключены первый и второй импульсные преобразователи. Импульсные преобразователи соединены с усилителем мощности, выход которого подключен к мотор-редуктору электропривода тыльного подгибания, соединенного с исполнительным механизмом тыльного подгибания стопы. Электронный блок управления и источник электропитания закреплены на приемной гильзе. Изобретение обеспечивает удобство инвалида в процессе ходьбы за счет наличия возможности в автоматическом режиме, близком к естественному, выполнять тыльное подгибание стопы в процессе ходьбы и продолжать движение при любых пространственных задержках протезированной конечности, сохраняя антропоморфное подгибание при ее переносе над опорной поверхностью. 2 ил.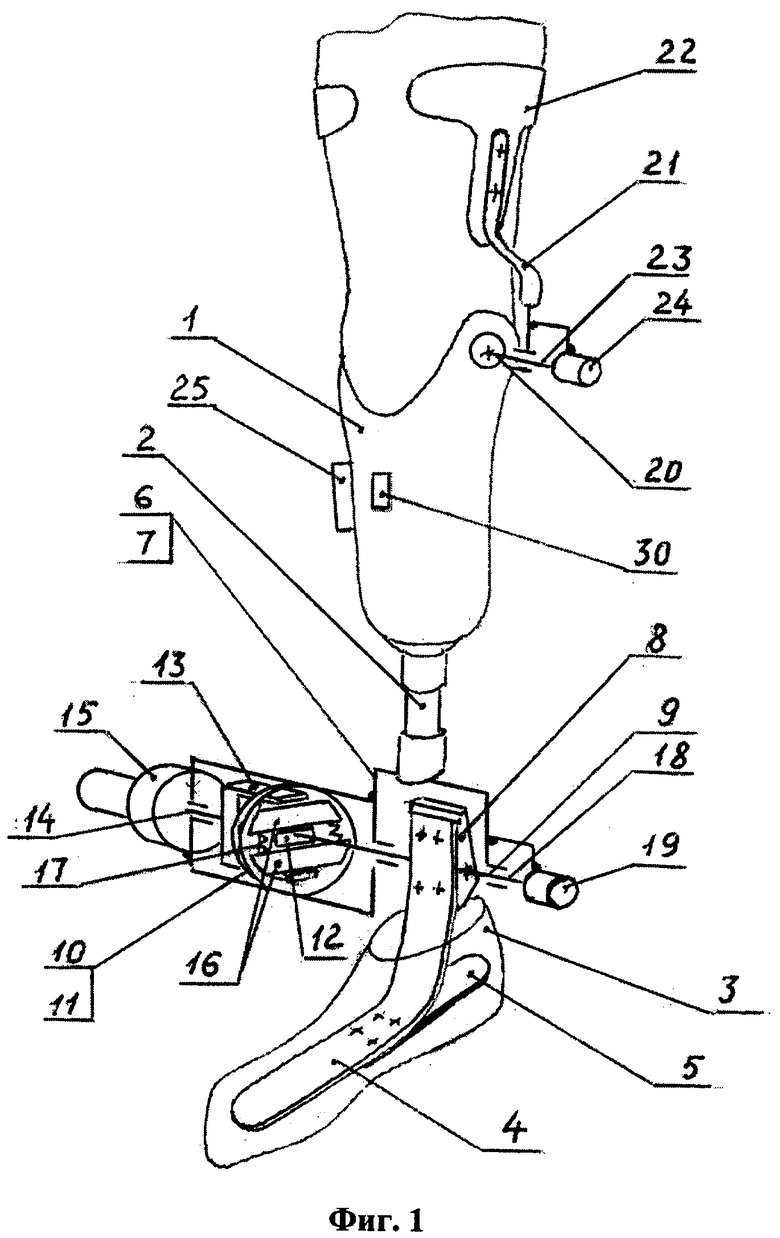
Протез голени, содержащий приемную гильзу, стойку голени, стопу, в которой плоская изогнутая пружина образует переднюю часть стопы, а заднюю часть стопы дополняет неподвижно соединенная с опорной поверхностью упругая пластина, отличается тем, что в него введен активный исполнительный механизм голеностопного шарнира, содержащий корпус шарнира тыльного подгибания стопы, в котором шарнирно установлен кронштейн стопы посредством неподвижно соединенной с ним оси тыльного подгибания, а также неподвижно соединенный с передней частью стопы, при этом в корпусе установлена самотормозящая муфта обгона двустороннего действия с разрезным диском, обойма которой неподвижно закреплена в корпусе, причем с одной стороны ось тыльного подгибания неподвижно соединена с кулачком муфты, установленным между ее полудисками, а поводок муфты, охватывающий полудиски, неподвижно соединен с выходным валом мотор-редуктора электропривода тыльного подгибания, фланец которого соединен с корпусом, при этом полудиски подпружинены и прижаты к обойме, кроме того, ось тыльного подгибания с другой стороны неподвижно соединена с ротором датчика угла тыльного подгибания, а его статор присоединен к корпусу, причем на приемной гильзе соосно физиологической оси сгибания колена закреплена ось, шарнирно соединенная с шиной, которая зафиксирована на разъемной манжете бедра, при этом с осью приемной гильзы неподвижно соединен ротор датчика управления тыльным подгибанием, а его статор соединен с шиной, кроме того, в устройство введен электронный блок канала управления тыльным подгибанием стопы, в котором датчик управления тыльным подгибанием и датчик обратной связи в виде датчика угла тыльного подгибания соединены со входом сумматора, на выходе которого подключены первый и второй импульсные преобразователи, соединенные с усилителем мощности, выход которого подключен к мотор-редуктору электропривода тыльного подгибания, соединенного с исполнительным механизмом тыльного подгибания стопы, при этом электронный блок управления и источник электропитания закреплены на приемной гильзе.
| ПРОТЕЗ ГОЛЕНИ | 2009 |
|
RU2482819C2 |
| ПРОТЕЗ СТОПЫ | 2011 |
|
RU2581493C2 |
| US 6761743 B1, 13.07.2004 | |||
| US 20150265425 A1, 24.09.2015 | |||
| US 20160158029 A1, 09.06.2016 | |||
| ПРОТЕЗ ГОЛЕНОСТОПНОЙ ЧАСТИ НОГИ | 1999 |
|
RU2153308C1 |

