Изобретение относится к медицинской технике, а именно к протезированию и протезостроению.
Известен протез голени по патенту РФ №2482819, кл. A61F 2/66.
Протез голени содержит приемную гильзу, стойку голени, стопу, в которой плоская изогнутая пружина, образует переднюю часть стопы, а заднюю часть стопы дополняет неподвижно соединенная с опорой упругая пластина.
Недостатком указанного протеза является недостаточное удобство использования, так как после заднего толчка стопа, выполнив движение тыльного сгибания, замедленно возвращается в исходное положение относительно стойки голени. Если инвалид задержит ногу при согнутом колене, то стопа возвращается в исходное положение, не сохраняя антропоморфного сгибания при ее переносе над опорной поверхностью. При этом чтобы вернуть стопу в состояние тыльного сгибания необходимо повторно выполнить задний толчок.
Наиболее близким по функциональной и технической сущности является протез голени по патенту РФ №2655452 кл. A61F 2/66 - прототип.
Протез голени, содержит приемную гильзу, стойку голени, стопу, в которой плоская изогнутая пружина образует переднюю часть стопы, а заднюю часть стопы дополняет неподвижно соединенная с опорной поверхностью упругая пластина, активный исполнительный механизм голеностопного шарнира, содержащий корпус шарнира тыльного сгибания стопы, в котором шарнирно установлен кронштейн стопы посредством неподвижно соединенной с ним осью тыльного сгибания, а также неподвижно соединенный с передней частью стопы, при этом в корпусе установлена самотормозящая муфта обгона двустороннего действия с разрезным диском, обойма которой неподвижно закреплена в корпусе, причем с одной стороны ось тыльного сгибания неподвижно соединена с кулачком муфты, установленным между ее полудисками, а поводок муфты, охватывающий полудиски, неподвижно соединен с выходным валом мотор-редуктора электропривода тыльного сгибания, фланец которого соединен с корпусом, при этом полудиски подпружинены и прижаты к обойме, кроме того ось тыльного сгибания с другой стороны неподвижно соединена с ротором датчика угла тыльного сгибания, а его статор присоединен к корпусу.
Недостатком данного протеза является то, что тыльное сгибание стопы выполняется как сочетанное со сгибанием голени в коленном суставе. При этом, например, в положении сидя стопа будет находиться в неестественном состоянии максимального тыльного сгибания.
Задачей предлагаемого изобретения является создание протеза голени, при использовании которого достигается удобство пользования за счет обеспеченния физиологичности ходьбы на протезе в статике и динамике благодаря возможности в естественном режиме выполнять тыльное сгибание стопы полностью сохраняя антропоморфность движения при переносе стопы над поверхностью опоры.
Технический результат поставленной задачи достигается тем, что в протез голени, содержащий: приемную гильзу, стойку голени, стопу, в которой плоская изогнутая пружина образует переднюю часть стопы; заднюю часть стопы дополняет неподвижно соединенная с опорной поверхностью упругая пластина; активный исполнительный механизм голеностопного шарнира, содержащий корпус шарнира тыльного сгибания стопы, в котором шарнирно установлен кронштейн стопы посредством неподвижно соединенной с ним осью тыльного сгибания, а также неподвижно соединенный с передней частью стопы; при этом в корпусе установлена самотормозящая муфта обгона двустороннего действия с разрезным диском, обойма которой неподвижно закреплена в корпусе, причем с одной стороны ось тыльного подгибания неподвижно соединена с кулачком муфты, установленным между ее полудисками, а поводок муфты, охватывающий полудиски, неподвижно соединен с выходным валом мотор-редуктора электропривода тыльного сгибания, фланец которого соединен с корпусом, при этом полудиски подпружинены и прижаты к обойме, кроме того ось тыльного подгибания с другой стороны неподвижно соединена с ротором датчика угла тыльного сгибания, а его статор присоединен к корпусу, кроме того содержащий электронный блок канала управления тыльным сгибанием стопы, в котором датчик управления тыльным сгибанием и датчик обратной связи в виде датчика угла тыльного сгибания соединен со входом сумматора, на выходе которого подключены первый и второй импульсные преобразователи, соединенные с усилителем мощности, выход которого подключен к мотор-редуктору электропривода тыльного сгибания, соединенного с исполнительным механизмом тыльного сгибания стопы, при этом электронный блок управления и источник электропитания закреплены на приемной гильзе, предлагается датчик управления тыльным сгибанием выполнить в виде датчика биоэлектрического управления, содержащего последовательно электроды, предварительный усилитель, детектор и фильтр, а также ввести два концевых выключателя с возможностью обеспечения защиты привода от перегрузки в момент прихода исполнительного устройства на упор в крайних положениях механизма, при этом датчик биоэлектрического управления разместить на приемной гильзе.
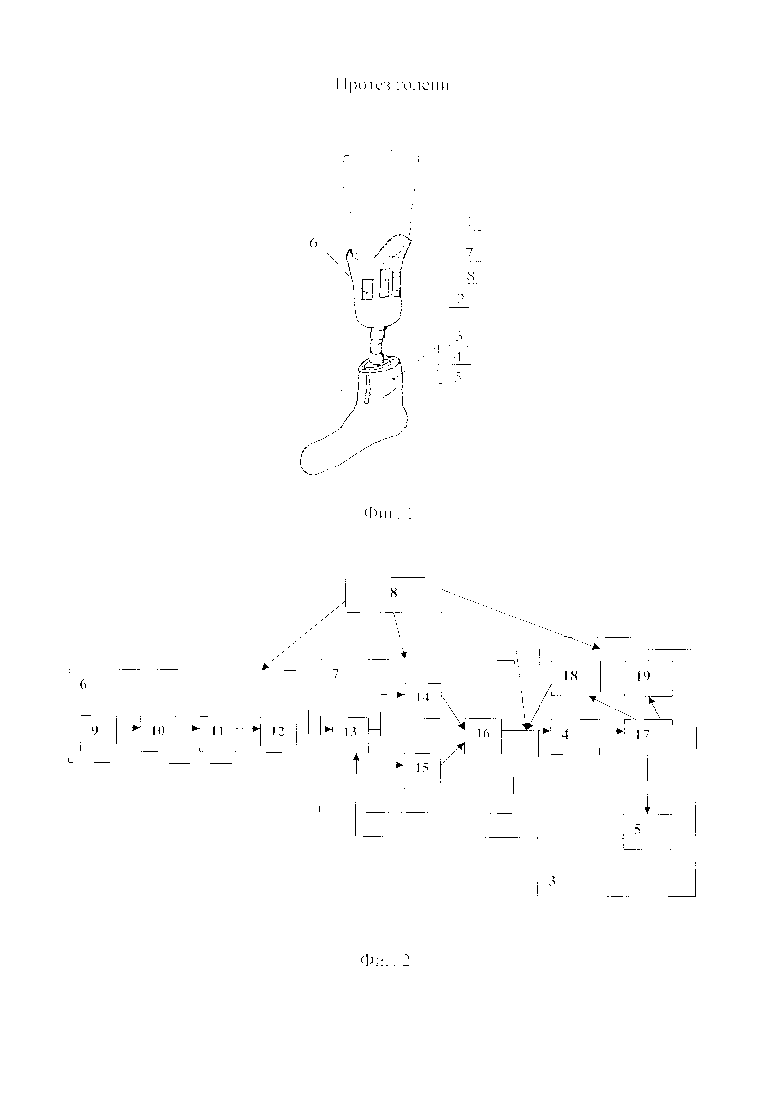
Сущность изобретения поясняется рисунками, где на фиг. 1 представлена конструктивная схема протеза голени с активным исполнительным механизмом голеностопного шарнира, а на фиг. 2 представлена функциональная структурная схема канала управления тыльным сгибанием стопы.
Протез голени (фиг. 1), содержит приемную гильзу 1, стойку 2 голени, активную искусственную стопу 3, содержащую мотор-редуктор 4 тыльного сгибания с самотормозящим механизмом и датчик 5 угла сгибания в голеностопном шарнире. Кроме того на приемной гильзе 1 закреплены датчик 6 биоэлектрического управления, электронный блок 7 управления и источник 8 электропитания.
Система управления тыльным сгибанием активной искусственной стопы (фиг. 2) содержит датчик 6 биоэлектрического управления тыльным сгибанием искусственной стопы, имеющий в своем составе электроды 9 съема электрического потенциала с сокращающейся мышцы тыльного сгибания, предварительный усилитель 10, детектор 11 и фильтр 12, соединенный со входом электронного блока 7 управления, содержащего сумматор 13, соединенный с двумя импульсными преобразователями 14, 15, соединенные с широтноимпульсным усилителем 16 мощности, который соединен с мотор-редуктором 4 искусственной активной стопы 3, содержащей, исполнительный механизм 17, соединенный с датчиком 5 угла сгибания стопы в голеностопном шарнире и с двумя концевыми выключателями 18, 19. причем источник питания 8 соединен: с датчиком 6 биоэлектрического управления, электронным блоком 7 и искусственной стопой 3.
Использование протеза голени осуществляется следующим образом. Оператор-инвалид фантомно (в режиме сохраненного стереотипа движения нижней конечности) выполняет тыльное сгибание стопы 3. Электрический потенциал сокращающейся мышцы сгибателя стопы поступает на датчик 6 биоэлектрического управления. При этом электроды 9 съема биоэлектрического сигнала, установленные, на поверхности мышцы сгибателя стопы, регистрируют величину электрического потенциала сокращающейся мышцы, представляющего собой исходный сигнал управления, который направляется на вход предварительного усилителя 10. Далее сигнал проходит детектирование (детектор 11) и фильтрацию (фильтр 12), после чего, обработанный таким образом сигнал управления поступает на вход сумматора 13. Далее, в зависимости от полярности, сигнал поступает на вход импульсного преобразователя 14 или 15 и затем на вход широтно-импульсного усилителя 16 мощности. После усиления сигнал поступает на мотор-редуктор 4, нагружаемый исполнительным механизмом 17. В процессе функционирования исполнительный механизм 17 приводит в движение датчик 5 отрицательной обратной связи. Роль датчика 5 обратной связи устройства выполняет потенциометрический датчик, установленный соосно с осью тыльного сгибания активной искусственной стопы. При этом статор датчика 5 неподвижно соединен с основанием стопы 3, а ротор датчика соединен с подвижной частью исполнительного механизма 17. Сигнал с датчика 5 поступает на сумматор 13, где сравнивается (вычитается) с обработанным задающим сигналом электродов 9. Полученная разница (положительная или отрицательная) является сигналом управления системы управления стопой 3.
В зависимости от полярности суммарного сигнала выполнятся прямое или реверсивное движение исполнительного механизма 17. Чем больше величина рассогласования сигналов, тем больше сигнал управления объектом регулирования, тем больше скорость движения исполнительного механизма 17. Когда суммарный сигнал будет равен нулю исполнительный механизм 17 остановится. Другими словами, если сигнала с датчика 6 биоэлектрического управления не будет, то система автоматически приводит исполнительный механизм 17 в положение, когда сигналы датчиков 6 и 5 сравняются. То есть, пока есть сигнал отличный от нуля есть движение исполнительной части. Исполнительный механизм 17 отслеживает величину сигнала датчика 6. При необходимости может быть выполнено масштабирование передачи движения средствами электронной системы. Ограничение хода исполнительного механизма 17 может выполняться с помощью микровыключателей 18, 19 или посредством введения системы защиты по току в момент прихода исполнительного механизма 17 на упор в крайних положениях механизма.
Положительный эффект предложенного изобретения заключается в следующем. При использовании предложенного протеза голени достигается удобство пользования за счет обеспеченния физиологичности ходьбы на протезе в статике и динамике благодаря возможности в естественном режиме выполнять тыльное сгибание стопы полностью сохраняя антропоморфность движения при переносе стопы над поверхностью опоры.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОТЕЗ ГОЛЕНИ | 2017 |
|
RU2655452C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| СТЕНД ДЛЯ НАСТРОЙКИ И ИСПЫТАНИЙ МНОГОФУНКЦИОНАЛЬНОГО АКТИВНОГО ПРОТЕЗА ПЛЕЧА | 2019 |
|
RU2729449C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| Протез бедра | 1984 |
|
SU1237204A1 |
| ПРОТЕЗ ГОЛЕНИ | 2009 |
|
RU2482819C2 |
| Устройство позиционного очувствления подвижности пальцев искусственной кисти | 2018 |
|
RU2702304C1 |
| ИСКУССТВЕННЫЙ КОЛЕННЫЙ СУСТАВ | 2021 |
|
RU2763255C1 |
| Протез бедра | 1985 |
|
SU1447365A1 |
| ШАРНИРНЫЙ КОЛЕННЫЙ СУСТАВ ПРОТЕЗА НИЖНИХ КОНЕЧНОСТЕЙ | 1994 |
|
RU2076670C1 |
Изобретение относится к медицине. Протез голени содержит приемную гильзу, стойку голени, стопу, в которой плоская изогнутая пружина образует переднюю часть стопы, а заднюю часть стопы дополняет неподвижно соединенная с опорной поверхностью упругая пластина. Активный исполнительный механизм голеностопного шарнира содержит корпус шарнира тыльного сгибания стопы, в котором шарнирно установлен кронштейн стопы посредством неподвижно соединенной с ним оси тыльного подгибания, а также неподвижно соединенный с передней частью стопы. В корпусе установлена самотормозящая муфта обгона двустороннего действия с разрезным диском, обойма которой неподвижно закреплена в корпусе. С одной стороны ось тыльного сгибания неподвижно соединена с кулачком муфты, установленным между ее полудисками, а поводок муфты, охватывающий полудиски, неподвижно соединен с выходным валом мотор-редуктора электропривода тыльного подгибания, фланец которого соединен с корпусом. Полудиски подпружинены и прижаты к обойме. Ось тыльного подгибания с другой стороны неподвижно соединена с ротором датчика угла тыльного сгибания, а его статор присоединен к корпусу. Устройство содержит электронный блок канала управления тыльным сгибанием стопы, в котором датчик управления тыльным сгибанием и датчик обратной связи в виде датчика угла тыльного сгибания соединен с входом сумматора. На выходе сумматора подключены первый и второй импульсные преобразователи. Импульсные преобразователи соединены с усилителем мощности, выход которого подключен к мотор-редуктору электропривода тыльного сгибания, соединенного с исполнительным механизмом тыльного сгибания стопы. Электронный блок управления и источник электропитания закреплены на приемной гильзе. Датчик управления тыльным сгибанием выполнен в виде датчика биоэлектрического управления, содержащего последовательно электроды, предварительный усилитель, детектор и фильтр. В канал управления введены два концевых выключателя с возможностью обеспечения защиты привода от перегрузки в момент прихода исполнительного устройства на упор в крайних положениях механизма. Датчик биоэлектрического управления размещен на приемной гильзе. Изобретение обеспечивает физиологичность ходьбы на протезе в статике и динамике благодаря возможности в естественном режиме выполнять тыльное сгибание стопы, полностью сохраняя антропоморфность движения при переносе стопы над поверхностью опоры. 2 ил.
Протез голени, содержащий приемную гильзу, стойку голени, стопу, в которой плоская изогнутая пружина образует переднюю часть стопы, а заднюю часть стопы дополняет неподвижно соединенная с опорной поверхностью упругая пластина, активный исполнительный механизм голеностопного шарнира, содержащий корпус шарнира тыльного сгибания стопы, в котором шарнирно установлен кронштейн стопы посредством неподвижно соединенной с ним оси тыльного подгибания, а также неподвижно соединенный с передней частью стопы, при этом в корпусе установлена самотормозящая муфта обгона двустороннего действия с разрезным диском, обойма которой неподвижно закреплена в корпусе, причем с одной стороны ось тыльного сгибания неподвижно соединена с кулачком муфты, установленным между ее полудисками, а поводок муфты, охватывающий полудиски, неподвижно соединен с выходным валом мотор-редуктора электропривода тыльного подгибания, фланец которого соединен с корпусом, при этом полудиски подпружинены и прижаты к обойме, кроме того, ось тыльного подгибания с другой стороны неподвижно соединена с ротором датчика угла тыльного сгибания, а его статор присоединен к корпусу, кроме того, содержащий электронный блок канала управления тыльным сгибанием стопы, в котором датчик управления тыльным сгибанием и датчик обратной связи в виде датчика угла тыльного сгибания соединен с входом сумматора, на выходе которого подключены первый и второй импульсные преобразователи, соединенные с усилителем мощности, выход которого подключен к мотор-редуктору электропривода тыльного сгибания, соединенного с исполнительным механизмом тыльного сгибания стопы, при этом электронный блок управления и источник электропитания закреплены на приемной гильзе, отличающийся тем, что датчик управления тыльным сгибанием выполнен в виде датчика биоэлектрического управления, содержащего последовательно электроды, предварительный усилитель, детектор и фильтр, а также тем, что в канал управления введены два концевых выключателя с возможностью обеспечения защиты привода от перегрузки в момент прихода исполнительного устройства на упор в крайних положениях механизма, при этом датчик биоэлектрического управления размещен на приемной гильзе.
| ПРОТЕЗ ГОЛЕНИ | 2017 |
|
RU2655452C1 |
| KR 1020150142217 A, 22.12.2015 | |||
| US 7942935 B2, 17.05.2011 | |||
| US 9554922 B2, 31.01.2017 | |||
| US 20170165088 A1, 15.06.2017. | |||

