Изобретение относится к медицинской технике, а именно к протезированию и протезостроению.
Известно «Устройство для исследования движений сегментов верхней конечности при управлении протезом» по а.с. №663398, содержащее жилет, тягу управления, датчик контроля, а также накладные шины с потенциометром.
Недостатком данного устройства является то, что для проведения исследования устройство надевают непосредственно на инвалида. При этом устройство предназначено для проведения испытания механических тяговых протезов, что не позволяет проводить настройку и испытания протезов с электромеханическими приводами.
Известен также «Стенд для испытаний протезов верхних конечностей» по а.с. №434940 частично устраняющий эти недостатки.
Это устройство является наиболее близким по функциональной и технической сущности и выбрано авторами в качестве прототипа. Данное устройство не требует участия в его работе инвалида-оператора.
Известное устройство содержит основание, электродвигатель, редуктор, механизм воздействия с бесступенчатым регулированием рабочих параметров и элементы крепления протезов.
Недостатком данного устройства являются низкие функциональные возможности, так как оно обеспечивает испытание только механических тяговых протезов и не позволяет проводить настройку и испытания систем управления многофункциональных протезов с электромеханическими приводами.
Задачей предлагаемого изобретения является создание устройства с новыми функциональными возможностями - обеспечением настройки электромеханических многофункциональных протезов путем формирования имитирующих управляющих действий - движений надплечья и культи плеча, которые требуются для управления многофункциональным протезом плеча при самообслуживании инвалида и при трудовых действиях.
Технический результат поставленной задачи достигается тем, что в стенде для настройки и испытаний многофункционального активного протеза плеча, содержащем основание, электродвигатель, редуктор, механизм воздействия с бесступенчатым регулированием рабочих параметров и элементы крепления протезов предлагается: основание выполнить в виде опорной стойки, на которой закрепить базовый кронштейн с имитатором неподвижного наплечника, ввести четыре бесступенчатых исполнительных механизма воздействия с самотормозящими приводами и датчиками угла поворота выходного вала, рычаг-имитатор надплечья и рычаг крепления протеза, при этом на базовом кронщтейне закрепить исполнительный механизм горизонтального движения рычага-имитатора надплечья, выходной вал которого соединить с корпусом исполнительного механизма вертикального движения рычага-имитатора надплечья, один конец которого соединить с выходным валом последнего, а второй с корпусом исполнительного механизма сгибания-разгибания рычага крепления протеза, выходной вал которого соединить с корпусом исполнительного механизма отведения-приведения рычага крепления протеза, а с выходным валом этого механизма соединить рычаг крепления протеза, причем в корпусе каждого исполнительного механизма воздействия установить самотормозящую муфту обгона двустороннего действия с разрезным диском, обойму которой неподвижно закрепить в корпусе, при этом с одной стороны выходной вал механизма неподвижно соединить с кулачком муфты, установленным между ее полудисками, а поводок муфты, охватывающий полудиски, неподвижно соединить с выходным валом мотор-редуктора, фланец которого соединить с корпусом, при этом полудиски взаимно подпружинить и прижать, таким образом, к обойме, кроме того выходной вал мотор-редуктора кинематически посредством зубчатой передачи соединить с ротором датчика угла поворота выходного вала, а статор датчика присоединить к корпусу, при этом на опорной стойке закрепить пульт управления стендом, обеспечивающий работу четырех каналов позиционного управления исполнительными механизмами и включающий в себя четыре задающих датчика управления и панель четырех электронных блоков, содержащие каждый сумматор, который соединен с двумя импульсными преобразователями, соединенными с широтно-импульсным усилителем мощности, который далее соединен с мотор-редуктором соответствующего исполнительного механизма, при этом задающий датчик соответствующего канала управления и датчик угла поворота выходного вала исполнительного механизма, представляющий собой датчик обратной связи, соединены с сумматором.
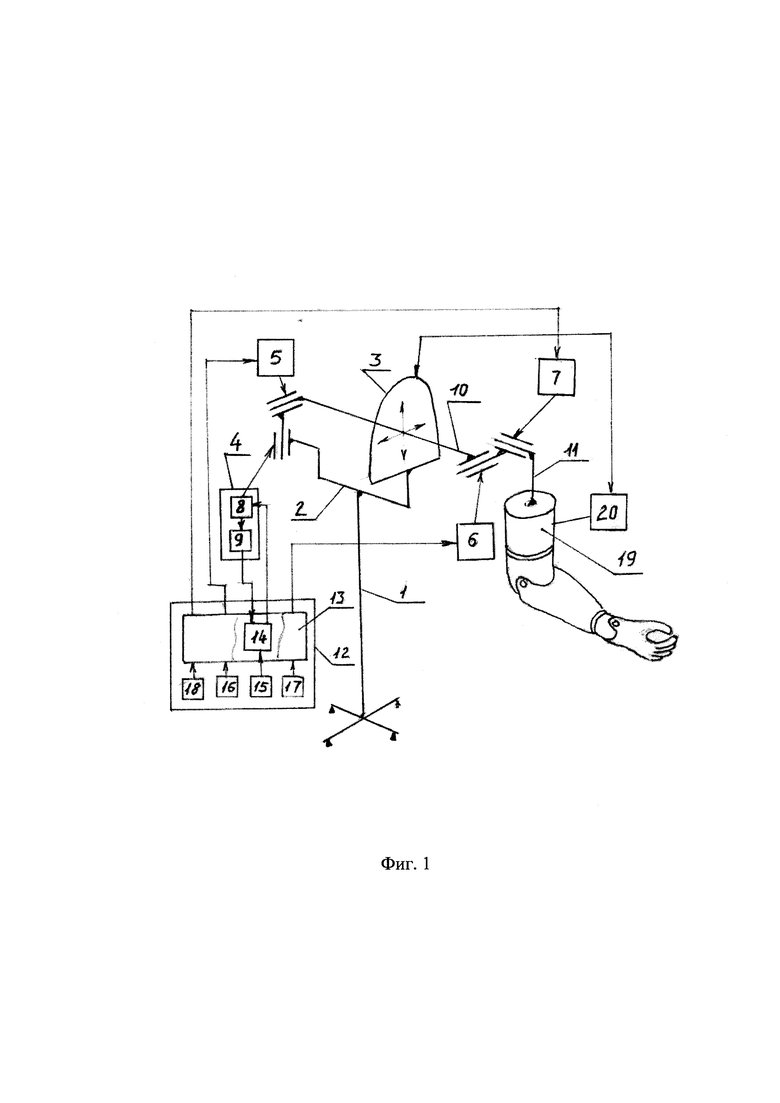
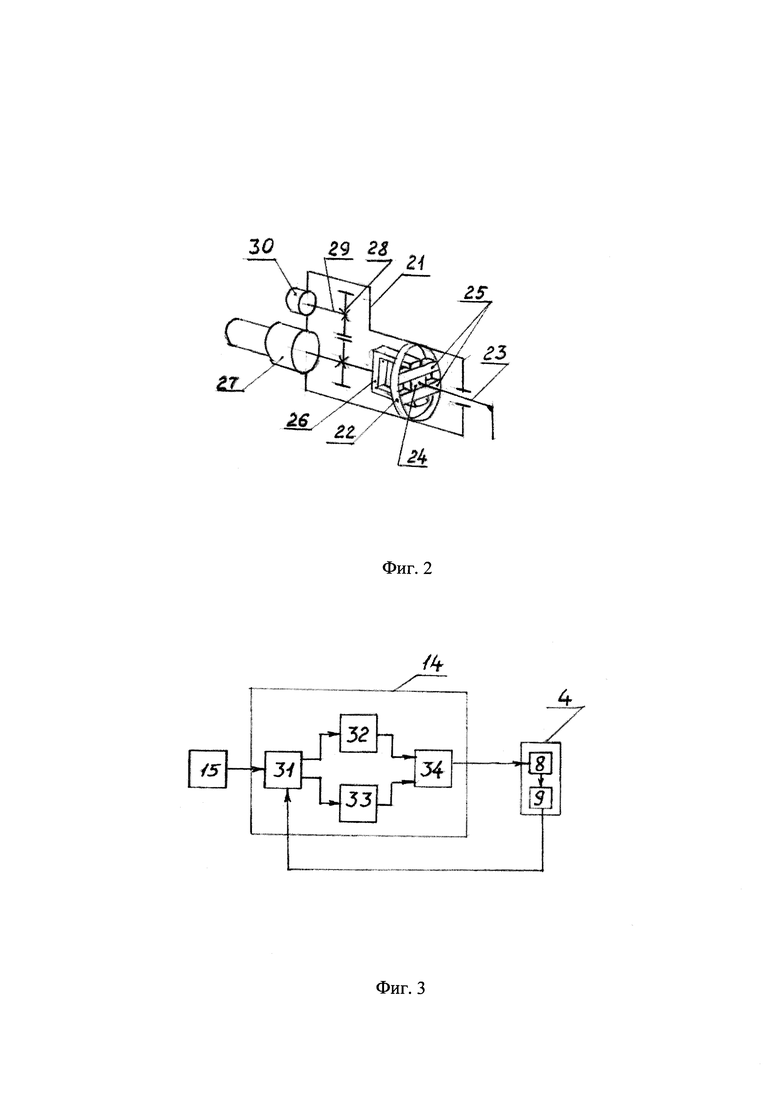
Сущность изобретения поясняется чертежами, где на фиг. 1, представлена структурная функциональная схема стенда для настройки и испытаний многофункционального активного протеза плеча, на фиг. 2 представлена кинематическая схема исполнительного механизма воздействия, на фиг. 3 представлена структурная функциональная схема системы позиционного управления исполнительными механизмами стенда.
Стенд содержит основание в виде опорной стойки 1, базовый кронштейн 2, имитатор неподвижного наплечника 3, четыре исполнительных механизма воздействия 4, 5, 6, 7 с типовыми самотормозящими приводами 8 и датчиками 9 угла поворота выходного вала, рычаг-имитатор надплечья 10 и рычаг крепления протеза 11. Стенд содержит также пульт управления 12, с панелью 13, содержащей четыре электронных блока 14 позиционного управления движением исполнительных звеньев 10 и 11, а также четыре задающих датчика 15, 16, 17, 18. Кроме того на рычаге 11 крепления протеза закреплен многофункциональный протез плеча 19 с комплектом датчиков управления 20, замыкающихся механически на неподвижный наплечник 3.
На базовом кронщтейне 2 закреплен исполнительный механизм 4 горизонтального движения рычага-имитатора надплечья, выходной вал которого соединен с корпусом исполнительного механизма 5 вертикального движения рычага-имитатора надплечья 10, один конец которого соединен с выходным валом последнего, а второй с корпусом исполнительного механизма сгибания-разгибания 6 рычага крепления протеза, выходной вал которого соединен с корпусом исполнительного механизма 7 отведения-приведения рычага крепления протеза, а с выходным валом этого механизма соединен рычаг крепления протеза 11. При этом в корпусе 21 каждого исполнительного механизма воздействия установлена самотормозящая муфта обгона двустороннего действия с разрезным диском.
Самотормозящее устройство данной конструкции обеспечивает передачу движения в ту или другую сторону только со стороны мотор-редуктора, а кроме того обеспечивает высокий коэффициент полезного действия в режиме оттормаживания. В то же время, данное устройство выполняет функцию защиты привода от перегрузки. (А.И. Турпаев. «Самотормозящие механизмы». Москва. «Машиностроение». 1976 г. Стр. 149-153).
Обойма 22 самотормозящей муфты обгона неподвижно закреплена в корпусе 21, при этом с одной стороны выходной вал 23 механизма неподвижно соединен с кулачком 24 муфты, установленным между ее полудисками 25, а поводок муфты 26, охватывающий полудиски, неподвижно соединен с выходным валом мотор-редуктора 27, фланец которого соединен с корпусом 21, при этом полудиски 25 взаимно подпружинены и прижаты к обойме 22, кроме того выходной вал мотор-редуктора кинематически посредством зубчатой передачи 28 соединен с ротором 29 датчика угла поворота выходного вала, а статор 30 датчика присоединен к корпусу 21,
Каждый из четырех электронных блоков 14, содержит каждый сумматор 31, который соединен с двумя импульсными преобразователями 32, 33, соединенными с широтно-импульсным усилителем мощности 34 который далее соединен с мотор-редуктором соответствующего исполнительного механизма, при этом задающий датчик соответствующего канала управления и датчик угла поворота выходного вала исполнительного механизма, представляющий собой датчик обратной связи, соединены с сумматором 31.
Устройство работает следующим образом В исходном состоянии рычаг-имитатор движений надплечья 10 установлен внутри неподвижного наплечника 3 в среднее положение исполнительных механизмов 4, 5, а рычаг 11 крепления протеза установлен в вертикальное положение. На рычаге 11 закрепляют протез плеча (19) с учетом физических размеров длины плеча конкретного устройства биотехнической системы «инвалид-протез», его задающие электромеханические датчики 20 управления соединяют с неподвижным наплечником.
Стенд предназначен для имитации управляющих механических движений надплечья и культи плеча, а именно движений надплечья в сагиттальной плоскости, а также движений сгибания-разгибания и отведения-приведения плеча. Реализацию этих движений выполняют путем включения в работу исполнительных механизмов стенда в различных режимах, определяемых методами управления протезного изделия. Это может быть поочередное управление отдельными звеньями протеза или включение в одновременное движение двух и более звеньев.
Для этого выполняют поворот роторов задающих датчиков на пульте управления 12 по очереди при включенной системе управления протеза или после предварительной установки положений задающих датчиков при выключенной системе управления протеза с последующим его включением.
При повороте, например, ротора задающего датчика 15, управляющего горизонтальным движением надплечья, сигнал поступает на сумматор 31 электронного блока 14. Далее этот сигнал поступает на импульсные преобразоатели 32 или 33 в зависимости от положительного или отрицательного знака сигнала и далее на широтно-импульсный усилитель мощности 34. Усиленный сигнал поступает на мотор-редуктор привода 8, который поворачивает рычаг-имитатор движений надплечья 10 и одновременно датчик обратной связи 9. Сигнал датчика 9 поступает на сумматор 31, где реализуется отрицательная обратная связь и происходит сравнение сигналов задающего датчика 15 и датчика 9. Разность этих сигналов представляет собой сигнал позиционного управления исполнительным механизмом 4. Движение продолжается до момента, когда разность сигналов станет равна нулю. При этом позиционному положению задающего датчика будет однозначно соответствовать позиционное угловое положение выходного вала исполнительного механизма. По аналогичной схеме работают все четыре исполнительных механизма стенда, что обеспечивает необходимые сочетания задающих сигналов для многофункциональных протезов плеча с различными системами управления.
Технико-экономическая эффективность изобретения заключается в создании устройства с новыми функциональными возможностями -обеспечением настройки электромеханических многофункциональных протезов путем формирования имитирующих управляющих действий -движений надплечья и культи плеча, которые требуются для управления многофункциональным протезом плеча с электромеханическими приводами при самообслуживании инвалида и при трудовых действиях.
Новые функциональные возможности достигаются путем формирования раздельного и сочетанного управления звеньями протеза плеча без участия оператора-инвалида, введением позиционной обратной связи при управлении исполнительными механизмами стенда и обеспечением точности координирования движений.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СРАВНИТЕЛЬНЫХ ИСПЫТАНИЙ СИСТЕМ УПРАВЛЕНИЯ АКТИВНЫХ МНОГОФУНКЦИОНАЛЬНЫХ ПРОТЕЗОВ ПЛЕЧА РАЗРАБОТЧИКОМ СО ЗДОРОВЫМИ РУКАМИ | 2020 |
|
RU2744657C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ ПЛЕЧА | 2019 |
|
RU2744605C2 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2015 |
|
RU2615278C2 |
| ПРОТЕЗ ГОЛЕНИ | 2019 |
|
RU2695948C1 |
| ПРОТЕЗ ГОЛЕНИ | 2017 |
|
RU2655452C1 |
| Многофункциональный активный ортез руки | 2022 |
|
RU2791396C1 |
| Устройство позиционного очувствления подвижности пальцев искусственной кисти | 2018 |
|
RU2702304C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 2010 |
|
RU2427349C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |
| Протез руки | 1989 |
|
SU1727824A1 |
Изобретение относится к медицине, а именно к стендам для настройки и испытаний многофункциональных активных протезов плеча. Стенд содержит основание, электродвигатель, редуктор, механизм воздействия с бесступенчатым регулированием рабочих параметров и элементы крепления протезов. Основание выполнено в виде опорной стойки, на которой закреплен базовый кронштейн с имитатором неподвижного наплечника. На базовом кронштейне закреплен исполнительный механизм горизонтального движения рычага-имитатора надплечья. Выходной вал механизма горизонтального движения соединен с корпусом исполнительного механизма вертикального движения рычага-имитатора надплечья, один конец которого соединен с выходным валом последнего, а второй с корпусом исполнительного механизма сгибания-разгибания рычага крепления протеза. Выходной вал механизма сгибания-разгибания соединен с корпусом исполнительного механизма отведения-приведения рычага крепления протеза, с выходным валом которого соединен рычаг крепления протеза. В корпусе каждого исполнительного механизма воздействия установлена самотормозящая муфта обгона двустороннего действия с разрезным диском, обойма которой неподвижно закреплена в корпусе. С одной стороны выходной вал механизма неподвижно соединен с кулачком муфты, установленным между ее полудисками, а поводок муфты, охватывающий полудиски, неподвижно соединен с выходным валом мотор-редуктора, фланец которого соединен с корпусом. Полудиски взаимно подпружинены и прижаты к обойме. Выходной вал мотор-редуктора кинематически посредством зубчатой передачи соединен с ротором датчика угла поворота выходного вала, а статор датчика присоединен к корпусу. На опорной стойке закреплен пульт управления стендом, обеспечивающий работу четырех каналов позиционного управления исполнительными механизмами. Изобретение обеспечивает возможность настройки электромеханических многофункциональных протезов путем формирования имитирующих управляющих действий. 3 ил.
Стенд для настройки и испытаний многофункционального активного протеза плеча, содержащий основание, электродвигатель, редуктор, механизм воздействия с бесступенчатым регулированием рабочих параметров и элементы крепления протезов, отличающийся тем, что основание выполнено в виде опорной стойки, на которой закреплен базовый кронштейн с имитатором неподвижного наплечника, введены четыре бесступенчатых исполнительных механизма воздействия с самотормозящими приводами и датчиками угла поворота выходного вала, рычаг-имитатор надплечья и рычаг крепления протеза, при этом на базовом кронштейне закреплен исполнительный механизм горизонтального движения рычага-имитатора надплечья, выходной вал которого соединен с корпусом исполнительного механизма вертикального движения рычага-имитатора надплечья, один конец которого соединен с выходным валом последнего, а второй с корпусом исполнительного механизма сгибания-разгибания рычага крепления протеза, выходной вал которого соединен с корпусом исполнительного механизма отведения-приведения рычага крепления протеза, а с выходным валом этого механизма соединен рычаг крепления протеза, причем в корпусе каждого исполнительного механизма воздействия установлена самотормозящая муфта обгона двустороннего действия с разрезным диском, обойма которой неподвижно закреплена в корпусе, при этом с одной стороны выходной вал механизма неподвижно соединен с кулачком муфты, установленным между ее полудисками, а поводок муфты, охватывающий полудиски, неподвижно соединен с выходным валом мотор-редуктора, фланец которого соединен с корпусом, при этом полудиски взаимно подпружинены и прижаты, таким образом, к обойме, кроме того, выходной вал мотор-редуктора кинематически посредством зубчатой передачи соединен с ротором датчика угла поворота выходного вала, а статор датчика присоединен к корпусу, при этом на опорной стойке закреплен пульт управления стендом, обеспечивающий работу четырех каналов позиционного управления исполнительными механизмами и включающий в себя четыре задающих датчика управления и панель четырех электронных блоков, содержащие каждый сумматор, который соединен с двумя импульсными преобразователями, соединенными с широтно-импульсным усилителем мощности, который далее соединен с мотор-редуктором соответствующего исполнительного механизма, при этом задающий датчик соответствующего канала управления и датчик угла поворота выходного вала исполнительного механизма, представляющий собой датчик обратной связи, соединены с сумматором.
| СТЕНД ДЛЯ ИСПЫТАНИЙ ПРОТЕЗОВ ВЕРХНИХ КОНЕЧНОСТЕЙfj>&?»;Ф^?; | 1972 |
|
SU434940A1 |
| Стенд для испытания креплений протезов верхних конечностей | 1980 |
|
SU942737A1 |
| Стенд для испытания механизмов протезов верхних конечностей | 1977 |
|
SU626776A1 |
| СТЕИД ДЛЯ ИСПЫТАНИЙ НА ДОЛГОВЕЧНОСТЬ ЛОКТЕВЫХ МЕХАНИЗМОВ ПРОТЕЗОВ ПЛЕЧА | 0 |
|
SU314520A1 |
| CN 108852567 A, 23.11.2018 | |||
| DE 102017119490 B3, 15.11.2018. | |||

