Изобретение относится к измерительной технике и может быть использовано в координатно-измерительных системах, устройствах для формирования объемных изображений и позволяет измерять расстояния до объектов, а также их отдельных частей, отличающихся по цвету с помощью компьютерной обработки цифровых снимков этих объектов.
Известен способ, который реализует система [1], предназначенная для пассивного определения координат источника излучения (горизонтального угла, угла возвышения и расстояния) посредством двух идентичных инфракрасных устройств пассивного типа для панорамного наблюдения (видеокамер). Видеокамеры в данной системе располагаются на одной общей вертикальной оси, вокруг которой они могут синхронно вращаться, и на известном друг от друга расстоянии таким образом, что их оптические оси всегда находятся в одной вертикальной плоскости. При этом расстояние определяется методом триангуляции по получаемым от каждой из камер углам видимого смещения источника излучения. Недостатками этого способа являются необходимость разноса видеокамер на некоторое расстояние друг от друга, что увеличивает габариты системы. Кроме того, необходимость использования двух видеокамер существенно увеличивает стоимость системы и снижает ее надежность.
Наиболее близким к предлагаемому способу является принятый за прототип способ определения расстояния, который реализует устройство на основе цифрового фотоаппарата [2]. В указанном способе с помощью фотоаппарата получают цифровой снимок объектов. Затем оптическая ось фотоаппарата перемещается по горизонтали на заданный угол, и получают второй снимок этих объектов. Путем корреляционной обработки, вычисляется расстояние, на которое изображение объекта сместилось на втором снимке относительно первого вследствие поворота фотоаппарата. Дальность до объекта определяется как отношение расстояния смещения его изображения к тангенсу угла поворота фотоаппарата. Недостатком этого способа является то, что применяемая в нем корреляционная обработка двух снимков не позволяет измерять расстояние более чем до одного объекта. С помощью корреляционной обработки можноопределить усредненное значение сдвига одного снимка относительно другого и тем самым измерить дальность только до одного объекта, сфотографированного на однородном фоне. Кроме того в данном способе не принимается в расчет фокусное расстояние объектива фотоаппарата, что может приводить к возникновению большой погрешности результата измерения расстояний.
Задача изобретения – обеспечить возможность измерения расстояний до всех объектов, а также до их отдельных частей, отличающихся по цвету и находящихся в поле зрения объектива цифрового фотоаппарата.
Поставленная задача решается благодаря тому, что в фотограмметрическом способе измерения расстояний вращением цифрового фотоаппарата, осуществляется горизонтирование фотоаппарата, так чтобы его плоскость снимка располагалась вертикально, формирование на ней двух изображений объектов, получаемых до и после поворота фотоаппарата вокруг вертикальной оси, проходящей через точку пересечения плоскости снимка с главной оптической осью фотоаппарата, на заданный угол, сегментация этих изображений по цвету, обнаружение идентичных сегментов и определение положения их центров в системе координат снимков, при этом сегмент на снимке представляется в качестве отдельного объекта, расстояние до которого вычисляется в соответствии с выражением
где ω – угол поворота фотокамеры;
x1 – абсцисса центра сегмента на первом снимке;
x2 – абсцисса центра сегмента на втором снимке;
f – фокусное расстояние фотоаппарата.
Свойство, появляющееся у заявляемого способа, – это возможность измерения расстояний до отдельных частей объектов, отличающихся по цвету и одновременно попадающих в поле зрения объектива фотоаппарата до и после его поворота.
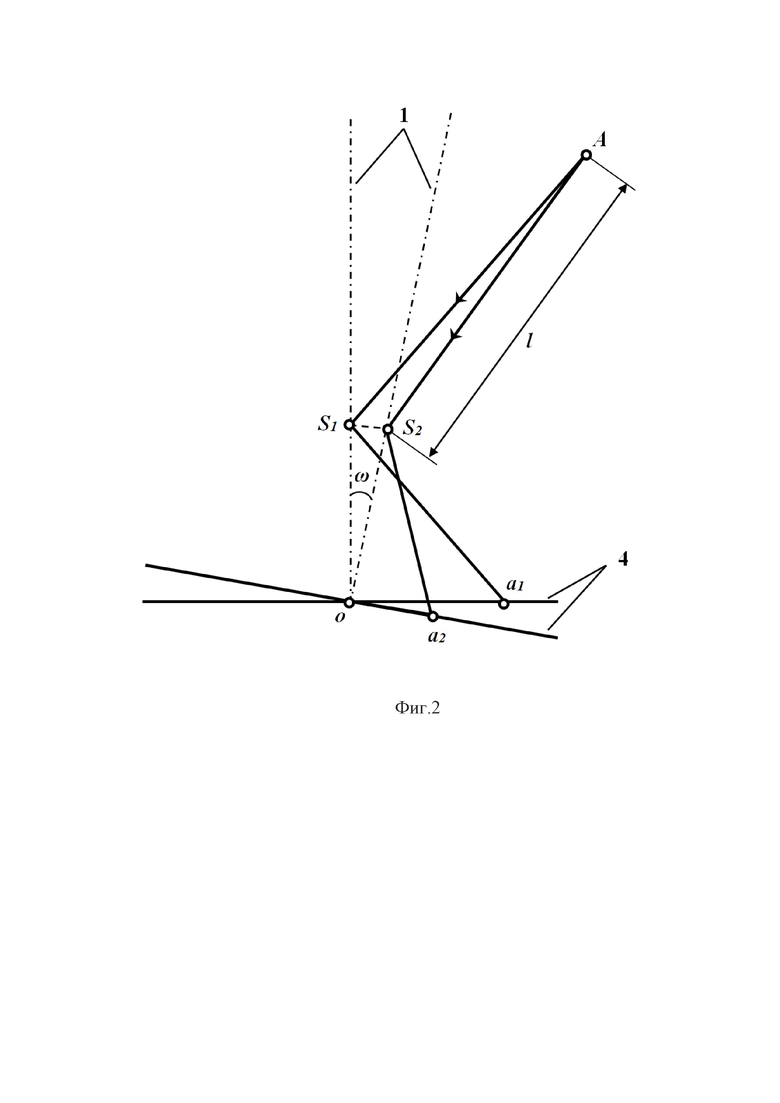
Сущность способа измерений поясняется чертежами. Фиг. 1 поясняет сущность построения изображения в оптической системе фотоаппарата на примере двух произвольно взятых точек A и B фотографируемых объектов, проектирующихсяна плоскость снимка 4. Фиг. 2 поясняет способ измерения расстояния l до произвольно взятой точки A фотографируемого объекта, проектирующейся на плоскость снимка 4 в точки a1 и a2, до и после поворота фотоаппарата на угол ω, соответственно.
Способ осуществляют следующим образом.
Выбирается такой ракурс съемки объектов, до которых измеряется расстояние, чтобы плоскость снимка 4 фотоаппарата заняла вертикальное положение. Делается первый снимок объектов. В соответствии с законами геометрической оптики [3], проектируемые лучи от объектов (Фиг. 1) входят в объектив фотоаппарата под некоторым углом к его главной оптической оси 1,расположенной перпендикулярнопередней главной плоскости 2 объектива. После чего преломляются на задней главной плоскости 3 объектива и выходят под тем же углом к главной оптической оси 1 фотоаппарата. В результате этого проектируемые лучи образуютдве конгруэнтные связки: входящие лучи с вершиной в передней узловой точке S и выходящие лучи в задней узловой точке S´ объектива фотоаппарата. Таким образом, на плоскости снимка 4 формируется изображение фотографируемых объектов. Затем фотоаппарат поворачивается на угол ω вокруг вертикальной оси, проходящей через центр плоскости снимка 4, и делается второй снимок.
Полученные изображения на двух снимках представляются как совокупность различных объектов или их частей, отличающихся друг от друга по цвету 
Тогда цвет пикселя на изображении, представленный через компоненты цветового пространства RGB, можно записать выражением:
где
Допустим, что необходимо выделить на изображении множество пикселей, принадлежащих произвольному объекту 
Граничные значения компонентов цвета, определяющих диапазон изменения цвета объекта на изображении, могут варьировать в широких пределах в зависимости от конкретных условий проведения съемки: освещенность, ракурс съемки и форма объекта. Процесс сегментации направлен на обнаружение изолированных по цвету сегментов изображения, состоящих из связанных друг с другом пикселей, цвет которых находится в одном цветовом диапазоне. Каждый пиксель в таком сегменте связан, по крайней мере, с одним из соседних, которые образуют некоторое подмножество связанных с ним пикселей
где k – установленный пороговый коэффициент.
Алгоритм поиска связанных сегментов состоит в построчном сканировании изображения и поиске связей между пикселями с использованием порогового коэффициента, задающего допустимое расхождение в значениях их компонентов цвета. Если обнаруживается пиксель, который одновременно может быть связан с несколькими пикселями из разных сегментов, то эти сегменты объединяются в один. Поскольку границы между сегментами иногда размыты, то они могут быть объединены ошибочно. Чтобы не допустить этого, при проверке пикселя на принадлежность к какому-то сегменту, отклонение значений компонентов цвета пикселя от средних значений компонентов цвета всего сегмента не должно превышать установленного порогового коэффициента. Соответственно второе условие принадлежности пикселя к сегменту задается выражением:
С помощью сегментации изображения по условиям (4, 5) определяется принадлежность всех пикселей на изображении к тем или иным сегментам. После этого производится обнаружение идентичных сегментов на двух снимках с применением методов цифровой обработки изображений.
Рассмотрим треугольник AS1S2(Фиг.2), образованный некоторой точкой на объекте и двумя передними узловыми точками объектива фотоаппарата, полученными до и после его поворота. Для каждого объекта, представленного сегментом на снимках, вычисляется расстояние от этого объекта до передней узловой точки объектива фотоаппарата после его поворота. Расстояние до объекта вычисляется из выражения:
Применив теоремы геометрии треугольника к (6) находим следующую формулу для вычисления расстояния до объекта:
Таким образом, предлагаемый способ позволяет измерить расстояние до отдельных частей объектов, отличающихся по цвету и находящихся в поле зрения объектива цифрового фотоаппарата.
Источники информации
1. Европейскийпатент EP №0379425 A1, МПКG01S 5/16, наизобретение «System for determining the position of at least one target by means of triangulation»
2. Патент РБ №6127 U, МПК G01C 3/00, на полезную модель«Измеритель расстояний».

Изобретение относится к измерительной технике и может быть использовано в координатно-измерительных системах, устройствах для формирования объемных изображений. Заявленный фотограмметрический способ измерения расстояний вращением цифрового фотоаппарата заключается в горизонтировании фотоаппарата, так чтобы его плоскость снимка располагалась вертикально, формировании на ней двух изображений объектов, получаемых до и после поворота фотоаппарата вокруг вертикальной оси, проходящей через точку пересечения плоскости снимка с главной оптической осью фотоаппарата, на заданный угол. Выполняется сегментация изображений по цвету. После этого производится обнаружение идентичных сегментов на двух снимках с применением методов цифровой обработки изображений. По теоремам геометрии треугольника вычисляется расстояние для каждого объекта, представленного сегментом на снимках. Технический результат – возможность измерения расстояний до всех объектов, а также до отдельных частей, отличающихся по цвету и находящихся в поле зрения объектива цифрового фотоаппарата. 2 ил.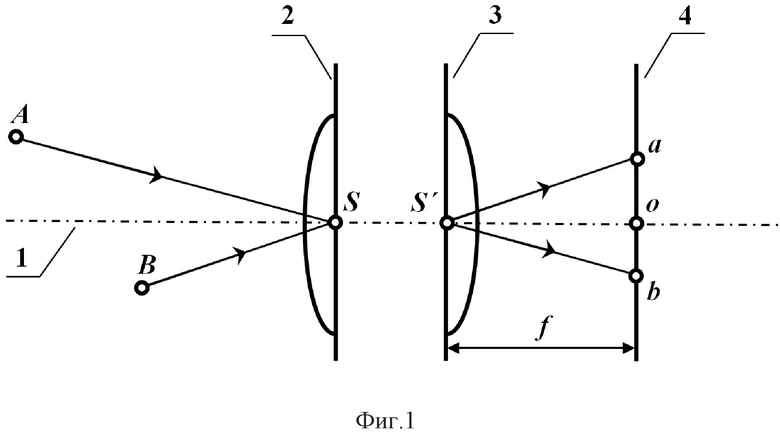
Фотограмметрический способ измерения расстояний вращением цифрового фотоаппарата, заключающийся в горизонтировании фотоаппарата, так чтобы его плоскость снимка располагалась вертикально, формировании на ней двух изображений объектов, получаемых до и после поворота фотоаппарата вокруг вертикальной оси, проходящей через точку пересечения плоскости снимка с главной оптической осью фотоаппарата, на заданный угол, сегментации этих изображений по цвету, обнаружении идентичных сегментов и определении положения их центров в системе координат снимков, при этом сегмент на снимке представляется в качестве отдельного объекта, расстояние до которого вычисляется в соответствии с выражением

где ω – угол поворота фотокамеры;
x1 – абсцисса центра сегмента на первом снимке;
x2 – абсцисса центра сегмента на втором снимке;
f – фокусное расстояние фотоаппарата.
| СПОСОБ БЕСКОНТАКТНОГО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ТОЧЕК ОБЪЕКТА | 2000 |
|
RU2173445C1 |
| Протез | 1928 |
|
SU14570A1 |
| WO 2009100728 A1, 20.08.2009 | |||
| JP 2011203057 A, 13.10.2011 | |||
| JP 2007322368 A, 13.12.2007 | |||
| ВСЕСОЮЗНАЯ | 0 |
|
SU379425A1 |

