Изобретение относится к области оптических бесконтактных измерений и может быть использовано для калибровки видеограмметрических систем, предназначенных для определения параметров движущихся объектов, посредством цифровой обработки видеоизображения простого физического маятника, совершающего свободные затухающие колебания.
Известен способ калибровки изображений стереофотограмметрической системы [1], позволяющий определить элементы внутреннего ориентирования снимка, дисторсии и элементы взаимного ориентирования посредством калибровки снимков стереофотограмметрических систем, в том числе предназначенных для измерения динамических процессов при скоростной стереосъемке. В указанном способе применяется тест-объект в виде планшета, с помощью которого строят условную прямоугольную сетку контрольных точек с заданными расстояниями между ними. Контрольные точки тест-объекта располагаются в одной плоскости, из них выбирают две точки с расстоянием между ними, равным расстоянию между камерами, калибруемой стереофотограмметрической системы, и размещают в этих контрольных точках, перпендикулярно плоскости тест-объекта, стержневые марки. Затем совмещают узловые точки объективов камер с продольными осями соответствующих стержневых марок. Поправки к координатам контрольных точек на изображении определяются с помощью формул тригонометрии путем вычитания из координат контрольных точек условной сетки координат идентичных контрольных точек прямоугольной сетки тест-объекта.
Также известен способ калибровки оптического устройства [2] с помощью калибровочной карты, на которую нанесено множество характерных точек с известными координатами. Преобразование трехмерных координат характерных точек на калибровочной карте в двумерные координаты изображения осуществляется с помощью математической модели оптического устройства, основанной на применении матрицы вращения и вектора перемещения. Затем посредством цифровой обработки изображения определяют координаты пикселов, фиксирующих положение характерных точек. Координаты пикселов характерных точек представляется в виде линейной суммы двумерных векторов и определяются по результатам всех измерений координат характерных точек с помощью линейного метода наименьших квадратов. После этого вычисляются линии обратной проекции характерных точек, соответствующие двумерным координатам на изображении. В результате, формируется множество результатов измерений, представляющих соответствие между координатами характерных точек на калибровочной карте и координатами пикселов на изображении. Таким образом определяются параметры оптического устройства.
Наиболее близким по совокупности существенных признаков с заявляемым способом является способ калибровки видеограмметрических систем [3]. В данном способе применяется тест-объект планшетного типа со множеством маркеров, регистрируемых камерой видеограмметрической системы. При этом координаты маркеров предварительно измеряются в собственной системе координат с повышенной точностью, превышающей прогнозируемую точность калибруемой видеограмметрической системы. Положение тест-объекта регулируется в пространстве по шести степеням свободы. В процессе калибровки осуществляется многократное перемещение тест-объекта в несколько положений, в каждом из которых регистрируются координаты маркеров на изображении. Поскольку собственная система координат тест-объекта привязана к системе координат калибруемой видеограмметрической системы, то численные значения параметров внутреннего и внешнего ориентирования видеограмметрической системы находят методами многомерной минимизации расхождений результатов измерений.
Недостатком приведенных способов калибровки оптических, стереофотограмметрических и видеограмметрических систем является применение неподвижных тест-объектов, хорошо подходящих для калибровки таких систем, объекты измерения которых находятся в статическом равновесии. В тех случае, когда видеограмметрическая система применяется для измерения параметров движущихся объектов, тестовый объект также должен обладать механическим движением, в противном случае невозможно определить метрологические характеристики видеограмметрической системы. Кроме этого, угловую ориентацию тест-объекта относительно плоскости изображения видеограмметрической системы достаточно сложно контролировать инструментальными средствами, что негативно влияет на точность определения ее метрологических характеристик.
Задача изобретения - повысить точность и достоверность определения метрологических характеристик видеограмметрической системы, предназначенной для измерения параметров объектов, обладающих механическим движением.
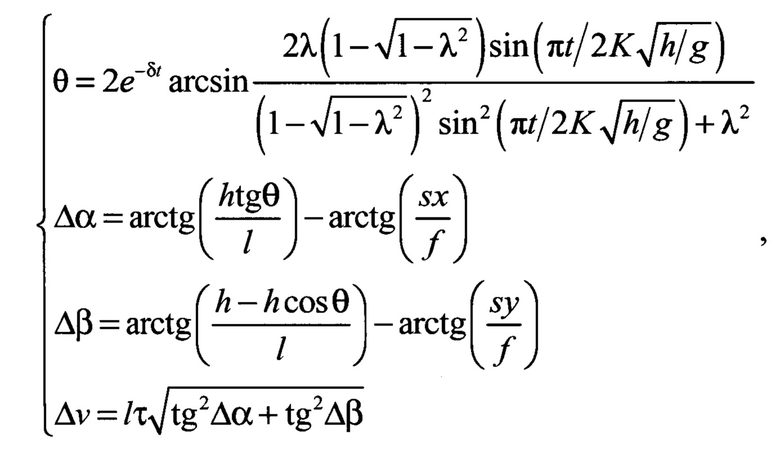
Поставленная задача решается благодаря тому, что калибровка видеограмметрической системы осуществляется с помощью плоскопараллельных свободных затухающих колебаний простого физического маятника. При этом измеренные значения параметров маятника получают посредством покадровой цифровой обработки его видеоизображения, формируемого видеограмметрической системой. Действительные значения скорости и вектора перемещения физического маятника в требуемый момент времени вычисляются расчетным методом по заданным параметрам математического маятника, с помощью функциональных зависимостей его координат от продолжительности колебаний. Метрологические характеристики видеограмметрической системы определяются из следующей системы уравнений:
где θ - угол отклонения маятника от вертикали;
(Δα, Δβ) - погрешности измерения угловых координат маятника;
Δν - погрешность измерения скорости маятника;
δ - декремент затухания колебаний маятника;
К - полный эллиптический интеграл 1-го рода;
λ - модуль эллиптического интеграла 1-го рода;
t - продолжительность колебаний маятника;
h - длина подвеса маятника;
 - расстояние между плоскостью колебаний маятника и плоскостью изображения видеокамеры;
- расстояние между плоскостью колебаний маятника и плоскостью изображения видеокамеры;
ƒ - фокусное расстояние объектива видеокамеры;
s - физический размер пиксела фотоматрицы видеокамеры;
g - ускорение свободного падения;
(х, у) - координаты центра маятника на изображении;
τ - интервал времени усреднения скорости маятника.
Свойство, появляющееся у заявляемого способа - это возможность задавать сложную, контролируемую траекторию движения физического маятника по сравнению с неподвижными тест-объектами, что позволяет определять метрологические характеристики видеограмметрической системы, связанные с измерением угловых координат, скорости и перемещения движущихся объектов.
Сущность изобретения поясняется чертежами, на которых:
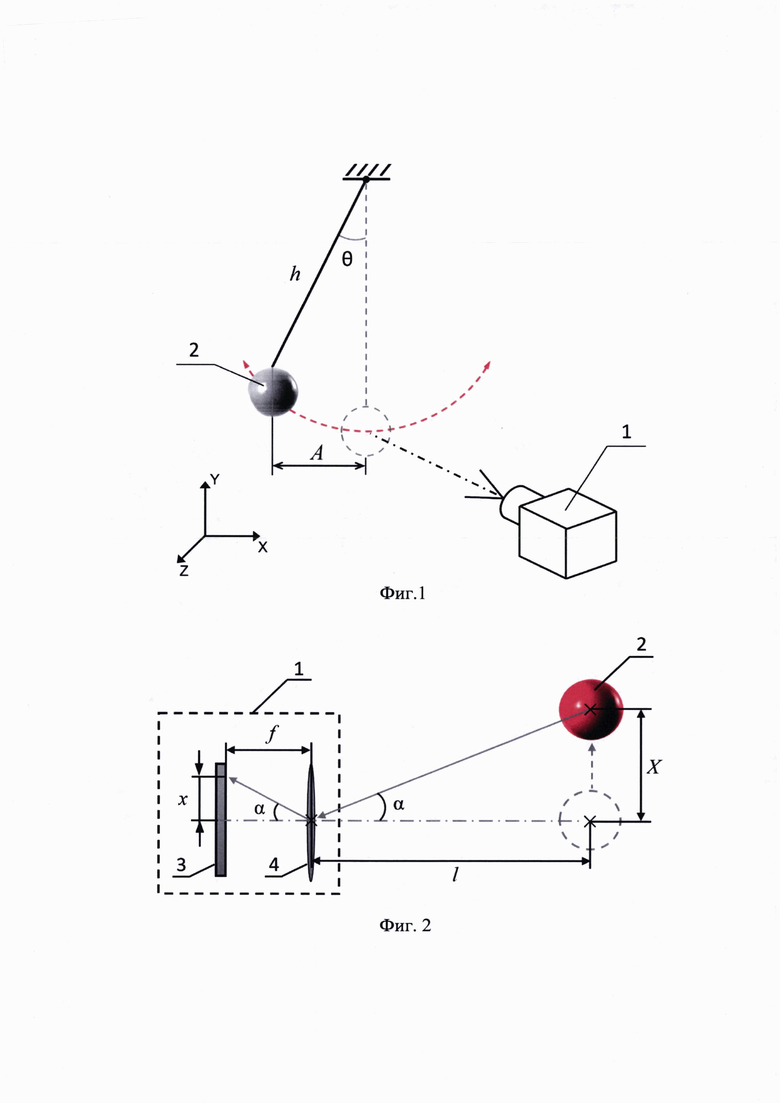
фиг. 1 - принципиальная схема калибровки видеограмметрической системы с помощью простого физического маятника;
фиг. 2 - принципиальная схема определения перемещения маятника.
Заявленный способ калибровки видеограмметрической системы с помощью физического маятника осуществляется следующим образом.
На принципиальной схеме калибровки видеограмметрической системы показано размещение видеокамеры 1, калибруемой видеограмметрической системы, перед плоскостью колебаний простого физического маятника 2, имеющего форму шара и совершающего плоскопараллельные свободные затухающие колебания на нерастяжимом подвесе длиной h с начальной амплитудой колебаний А. Цвет физического маятника 2 обладает одним сильно выраженным компонентом, позволяющим обнаружить его видеограмметрической системе. Видеокамера 1 устанавливается в заданной точке, находящейся на заданном расстоянии  от плоскости колебаний физического маятника 2, после чего видеокамера 1 горизонтируется так, чтобы данная плоскость была параллельна плоскости изображения видеокамеры 3, а оптическая ось объектива видеокамеры 4 была направлена на вертикальную ось, проходящую через центр маятника, находящегося в состоянии равновесия. После этого физический маятник 2 отклоняется от вертикали на заданный угол 0 в пределах угла обзора видеокамеры 1 и отпускается, начиная совершать свободные затухающие колебания под действием силы тяжести.
от плоскости колебаний физического маятника 2, после чего видеокамера 1 горизонтируется так, чтобы данная плоскость была параллельна плоскости изображения видеокамеры 3, а оптическая ось объектива видеокамеры 4 была направлена на вертикальную ось, проходящую через центр маятника, находящегося в состоянии равновесия. После этого физический маятник 2 отклоняется от вертикали на заданный угол 0 в пределах угла обзора видеокамеры 1 и отпускается, начиная совершать свободные затухающие колебания под действием силы тяжести.
Затухающие колебания математического маятника описываются дифференциальным уравнением движения:
где dx - дифференциал абсциссы в системе координат маятника;
dt - дифференциал продолжительности колебаний маятника;
δ - коэффициент затухания колебаний маятника;
ω - циклическая частота собственных незатухающих колебаний маятника.
Решением данного уравнения в случае малых затуханий (δ2<<ω20) является функция:

где А - начальная амплитуда колебаний;
еδТ - декремент затухания;
ϕ - начальная фаза колебаний.
Декремент затухания колебаний маятника определяется отношением амплитуд двух его последовательных колебаний:
где Т- период колебаний маятника.
Циклическая частота собственных незатухающих колебаний маятника зависит от длины его подвеса:
Где  - длина подвеса маятника;
- длина подвеса маятника;
g - ускорение свободного падения.
Момент времени определяющий амплитуду угла маятника и угол его отклонения от вертикали вычисляется из выражения:
где F(ψ,λ) - неполный эллиптический интеграл 1-го рода при модуле λ и амплитуде интеграла ψ.
При малой амплитуде угла отклонения подвеса маятника от вертикали (<19°) данная зависимость принимает вид:
где К- полный эллиптический интеграл 1-го рода.
Для определения значения интеграла применяются расчетные зависимости, позволяющие находить искомые значения интеграла, которые совпадают с точными табличными данными (с погрешностью <<1%), на основе элементарной функции:
Модуль эллиптического интеграла 1-го рода зависит от амплитуды угла отклонения подвеса маятника в выбранный момент времени:
Амплитуда интеграла с учетом декремента затухания колебаний маятника имеет следующую функциональную зависимость от продолжительности колебаний:
Изменение угла отклонения маятника от вертикали задается функцией:

Угол отклонения маятника от вертикали в заданный момент времени определялся из выражения:
Видеограмметрическая система обнаруживает маятник и отслеживает его перемещения. Для этого производится покадровая цифровая обработка видеоизображения маятника, на котором выделяется его контур, путем определения максимальных значений лапласиан. Этот подход основан на покомпонентной обработке цвета каждого пиксела на изображении с использованием оператора Лапласа, который для функции двух переменных р(х,у), задающей цвет пиксела на изображении, определяется выражением:
Поскольку цвет пиксела и соответственно значение функции р(х,у) может быть выражено через трехкомпонентный вектор цвета  а также приняв во внимание, что один из трех компонентов цвета маятника сильно выражен, задается следующая функция:
а также приняв во внимание, что один из трех компонентов цвета маятника сильно выражен, задается следующая функция:

В этом случае, значение оператора Лапласа для красного компонента цвета будет максимальным на границе, отделяющей маятник от фона. Для выделения контура маятника на изображении применяется метод Спрэгга. Данный метод обладает высокой точностью при условии относительно малого эксцентриситета контура шарообразного объекта измерений. Соответственно, параметры базовой средней окружности, аппроксимирующей контур маятника на изображении определяются по следующим формулам:
где х0, у0 - координаты центра средней окружности;
r0 - радиус средней окружности.
xi, yi - декартовы координаты точек на контуре маятника, взятые с равным угловым шагом;
ri - длина радиус-векторов точек контура маятника;
После этого вычисляются координаты центра маятника на изображении путем решения оптимизационной задачи на вычисление минимума гладкой целевой функции:

Направление движения маятника, выражается через вектор перемещения относительно нижней точки равновесия маятника, выбранной за начало координат.Угловые координаты центра маятника определяются видеограмметрической системой по его координатам на изображении:
где s - физический размер пиксела фотоматрицы видеокамеры;
(х, у) - координаты центра маятника на изображении.
Координаты центра физического маятника определяются из выражений:
где - расстояние между плоскостью изображения видеокамеры и плоскостью колебаний маятника.
Погрешности измерения видеограмметрической системой зенитного и азимутального углов маятника определяются из следующих выражений:
По результатам измерений координат маятника вычисляется амплитуда каждого периода колебаний и рассчитывается его средняя скорость за требуемый интервал времени усреднения:

где (νx, νy, νz) - составляющие средней скорости маятника вдоль осей системы координат;
(ΔХ, ΔY) - составляющие перемещения маятника вдоль осей системы координат;
τ - интервал времени усреднения скорости маятника. Измеренное значение скорости маятника сравнивается с расчетным значением и определяется абсолютная погрешность измерения его скорости:
Метрологические характеристики калибруемой видеограмметрической системы могут быть представлены, например, в виде графика погрешностей измерений значений координат маятника. Результаты оценки абсолютной погрешности видеограмметрической системы при измерении средней скорости маятника могут быть представлены в виде гистограммы с построением кривой Парето, отображающей распределение вероятности погрешности измерения. Таким образом, с помощью свободных затухающих колебаний простого физического маятника определяются метрологические характеристики видеограмметрической системы, позволяющие установить значения ее погрешностей измерения угловых координат, скорости и перемещения движущихся объектов.
Источники информации
1. Патент на изобретение SU 1703972 А1 «Способ калибровки изображений стереофотограмметрической системы». Авторы: Л.Д. Бурьянова, В.А. Гоголев, Л.Е. Горша и др. Бюл. №1, 1992.
2. Патент на изобретение US 10127687 В2 «Calibration device, calibration method, optical device, image-capturing device, projection device, measuring system, and measuring method»: Авторы: M. Toshiaki. Заявитель: Olympus Corporation. 2018.
3. Патент на изобретение RU 2645432 C1 «Способ калибровки видеограмметрических систем и контрольное приспособление для его осуществления». Авторы: В.П. Кулеш. Бюл. №6, 2018.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КАЛИБРОВКИ ВИДЕОГРАММЕТРИЧЕСКИХ СИСТЕМ И КОНТРОЛЬНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645432C1 |
| Способ взаимной калибровки видеокамеры и устройства многолучевого лазерного подсвета | 2024 |
|
RU2840117C1 |
| СПОСОБ ГРАДУИРОВКИ РАСПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО РАЗРЕШЕНИЯ УСТРОЙСТВА ПОЛУЧЕНИЯ ЦИФРОВОГО РЕНТГЕНОВСКОГО ИЗОБРАЖЕНИЯ | 2024 |
|
RU2826349C1 |
| СПОСОБ ВЗАИМНОЙ КАЛИБРОВКИ ВИДЕОКАМЕРЫ И УСТРОЙСТВА ВЕЕРНОГО ЛАЗЕРНОГО ПОДСВЕТА | 2021 |
|
RU2788666C1 |
| Способ калибровки подводной видеокамеры | 2022 |
|
RU2789190C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОГРАФИЧЕСКИХ КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2580332C1 |
| Устройство для автоматизированной калибровки видеокамер различных спектральных диапазонов | 2020 |
|
RU2749363C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТЕЙ ДО ОБЪЕКТОВ ПО ИЗОБРАЖЕНИЯМ С ЦИФРОВЫХ ВИДЕОКАМЕР | 2016 |
|
RU2626051C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТОВ ПО ИХ ЦИФРОВЫМ ИЗОБРАЖЕНИЯМ | 2018 |
|
RU2697822C2 |
| Способ определения собственных координат по трем визирным светоизлучающим маркерам | 2024 |
|
RU2838123C1 |
Изобретение относится к области оптических бесконтактных измерений и применяется для калибровки видеограмметрических систем, предназначенных для определения параметров движущихся объектов. Сущность предлагаемого решения заключается в следующем. Калибровка видеограмметрической системы осуществляется с помощью физического маятника, совершающего плоскопараллельные свободные затухающие колебания. Измеренные значения параметров движения маятника получают посредством покадровой цифровой обработки изображений физического маятника, формируемого калибруемой видеограмметрической системой. Действительные значения скорости и вектора перемещения физического маятника в требуемый момент времени определяются по заданным параметрам маятника в зависимости от продолжительности колебаний, затем определяются метрологические характеристики калибруемой видеограмметрической системы. Техническим результатом заявленного решения является повышение точности определения метрологических характеристик фотограмметрической системы. 2 ил.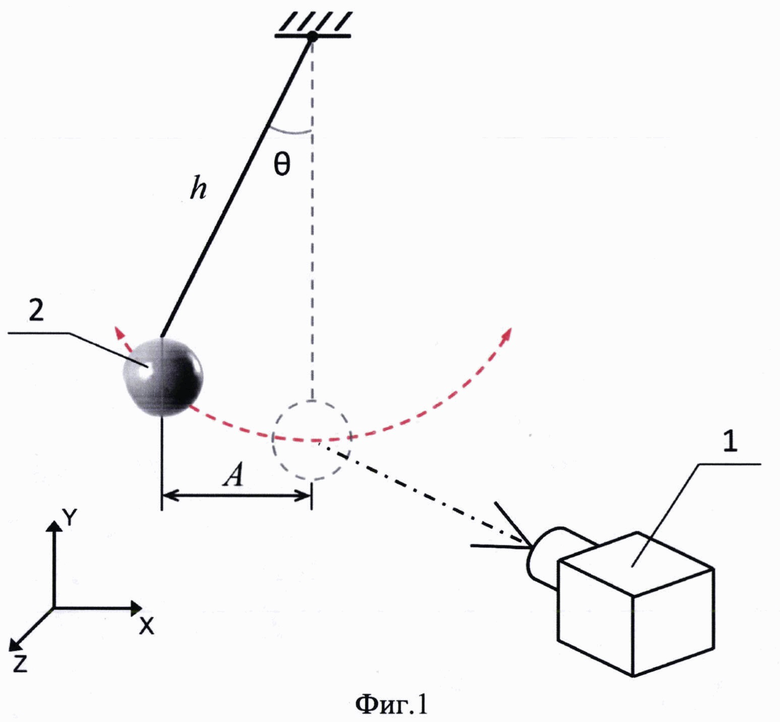
Способ калибровки видеограмметрической системы с помощью физического маятника, заключающийся в применении плоскопараллельных свободных затухающих колебаний простого физического маятника, измеренные значения параметров движения которого получают посредством покадровой цифровой обработки его видеоизображения, формируемого калибруемой видеограмметрической системой, а действительные значения скорости и вектора перемещения физического маятника в требуемый момент времени вычисляются расчетным методом по заданным параметрам математического маятника с помощью функциональных зависимостей его координат от продолжительности колебаний, при этом метрологические характеристики видеограмметрической системы определяются путем решения следующей системы уравнений:
где θ - угол отклонения маятника от вертикали;
(Δα, Δβ) - погрешности измерения угловых координат маятника;
Δν - погрешность измерения скорости маятника;
δ - декремент затухания колебаний маятника;
K - полный эллиптический интеграл 1-го рода;
λ - модуль эллиптического интеграла 1-го рода;
t - продолжительность колебаний маятника;
h - длина подвеса маятника;
l - расстояние между плоскостью колебаний маятника и плоскостью изображения видеокамеры;
ƒ - фокусное расстояние объектива видеокамеры;
s - физический размер пиксела фотоматрицы видеокамеры;
g - ускорение свободного падения;
(х, у) - координаты центра маятника на изображении;
τ - интервал времени усреднения скорости маятника.
| СПОСОБ КАЛИБРОВКИ ВИДЕОГРАММЕТРИЧЕСКИХ СИСТЕМ И КОНТРОЛЬНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645432C1 |
| Способ измерений координат точек объекта в пространстве | 2020 |
|
RU2749654C1 |
| Способ калибровки изображений стереофотограмметрической системы | 1988 |
|
SU1703972A1 |
| US 10127687 B2, 13.11.2018. | |||

