Изобретение относится к измерительной технике и может быть использовано в координатно-измерительных устройствах и системах технического зрения для определения дальности, ориентирования в пространстве с помощью цифровой видеокамеры и трех расположенных в горизонтальной плоскости и равноудаленных друг от друга источников света, мигающих с заданной частотой.
Известен способ, который реализует система [1], предназначенная для пассивного определения координат источника излучения (горизонтального угла, угла возвышения и расстояния) посредством двух идентичных инфракрасных устройств пассивного типа для панорамного наблюдения (видеокамер). Видеокамеры в данной системе располагаются на одной общей вертикальной оси, вокруг которой они могут синхронно вращаться, и на известном друг от друга расстоянии таким образом, что их оптические оси всегда находятся в одной вертикальной плоскости. При этом расстояние определяется методом триангуляции по получаемым от каждой из камер углам видимого смещения источника излучения. Недостатком этого способа является необходимость разноса видеокамер на некоторое расстояние друг от друга, что увеличивает габариты системы. Кроме того, необходимость использования двух видеокамер существенно увеличивает стоимость системы и снижает ее надежность.
Наиболее близким к предлагаемому является принятый за прототип способ, измерения расстояния на цифровой видеокамере при помощи мишени с формой шара [2]. Для определения расстояния до объекта с помощью цифровой видеокамеры используется мишень, имеющая форму шара, известного радиуса и цвета, которая крепится к данному объекту. Определение расстояний основано на сопоставлении физического размера радиуса мишени с его размером на видеоизображении. Недостаток данного способа заключается в зависимости точности и диапазона измерения расстояния от размера радиуса мишени. Для увеличения точности и диапазона измерения расстояния этим способом необходимо использовать мишень большого размера, что усложняет ее закрепление на объекте. Кроме того, отсутствие в мишени встроенного источника света не позволяет применять данный способ при низком уровне освещенности мишени.
Задача изобретения – повысить диапазон и точность измерения дальности, обеспечить возможность определять дальность при низком уровне естественного освещения.
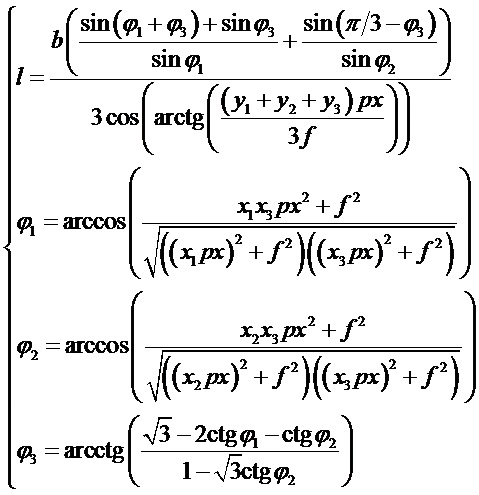
Поставленная задача решается благодаря тому, что в способе измерения дальности с помощью цифровой видеокамеры используются три источника света, которые мигают с заданной частотой. При этом источники света расположены в горизонтальной плоскости и равноудалены друг от друга на известное расстояние. Дальность до источников света определяется с помощью цифровой видеокамеры, для которой выбирается такой ракурс видеосъемки, чтобы плоскость изображения видеокамеры заняла вертикальное положение и все источники света находились в поле зрения видеокамеры не перекрывая друг друга. Применяя методы цифровой обработки изображений, производится обнаружение источников света на видеоизображении по частоте их мигания. После этого вычисляются углы между проектирующими лучами от источников света и плоскостью изображения видеокамеры, что позволяет определить дальность до геометрического центра, образованного этими источниками света, используя систему уравнений:
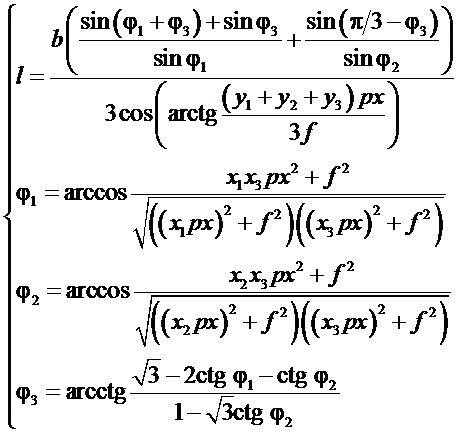
где b – расстояние между источниками света;
φ 1, φ2 – углы, образованные проецирующим лучом от центрального источника света и проецирующими лучами от крайних источников света в поле зрения видеокамеры, соответственно;
φ 3 – угол образованный прямой, соединяющей крайний левый с центральным источником света в поле зрения видеокамеры, и проецирующим лучом от центрального источника света;
x1, x2, x3 – абсциссы центров крайнего левого, центрального и крайнего правого источников света на видеоизображении, соответственно;
y1, y2, y3 – ординаты центров крайнего левого, центрального и крайнего правого источников света на видеоизображении, соответственно;
f – фокусное расстояние видеокамеры;
рх – физический размер пикселя на изображении.
Свойство, появляющееся у заявляемого способа, – это возможность измерения дальности при низком уровне естественного освещения.
Сущность изобретения поясняется чертежами, на которых:
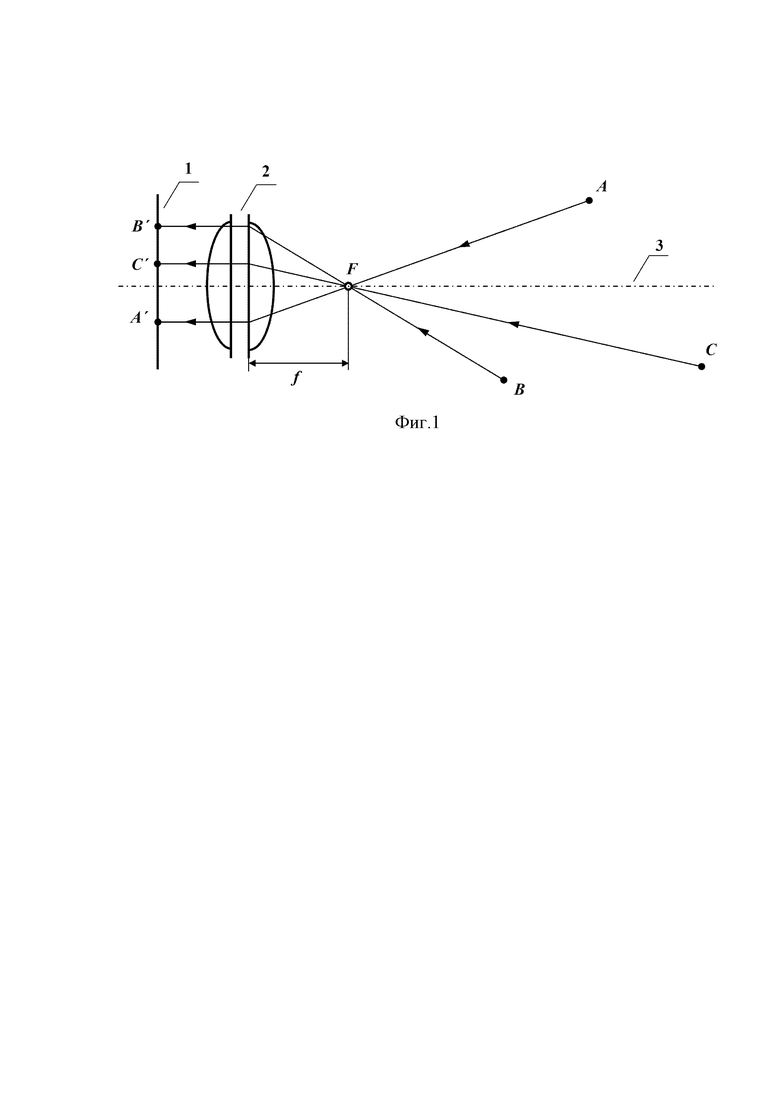
фиг. 1 – принципиальная схема построения в оптической системе видеокамеры изображений источников света;
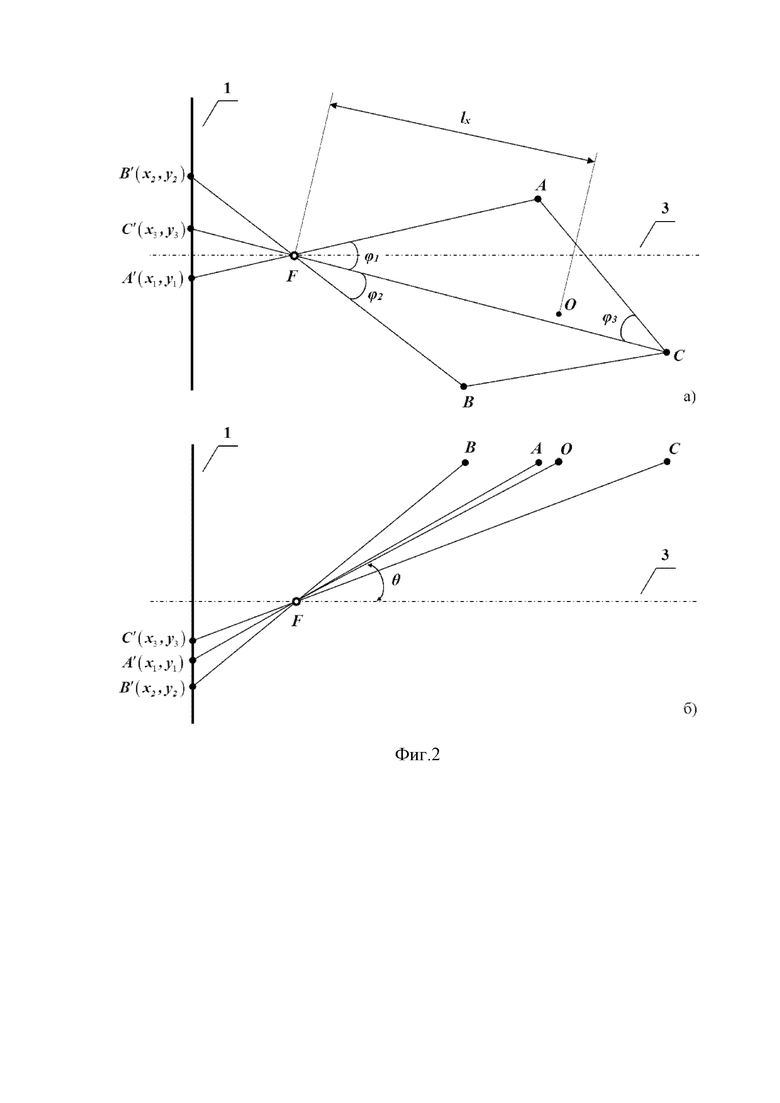
фиг. 2 – принципиальная схема определения дальности с помощью видеокамеры до геометрического центра трех источников света: а) вид сверху; б) вид слева.
Заявленный способ определения дальности с помощью цифровой видеокамеры и трех источников света осуществляют следующим образом.
Для определения дальности до трех источников света выбирается такой ракурс видеосъемки, чтобы плоскость изображения видеокамеры 1 заняла вертикальное положение, все источники света находились в поле зрения видеокамеры и не перекрывали друг друга. В соответствии с законами геометрической оптики (Фиг. 1), проецируемые лучи от трех источников света А, В, С проходят через передний главный фокус объектива F и входят в объектив видеокамеры 2 под некоторым углом к его главной оптической оси 3. После этого лучи преломляются и проецируются на плоскость изображения 1. В результате, на плоскости изображения 1 формируются изображения источников света.
Поиск источников света производится путем обработки видеоизображения в режиме реального времени. Из теоремы Котельникова следует, что определение частоты мигания источников света возможно только в том случае если частота смены кадров видеоизображения будет превышать частоту мигания в два и более раз.
Для определения частоты мигания источников света используется функция разности по двум последовательно сделанным кадрам видеоизображения:

где k – пороговый коэффициент изменения яркости пикселя на изображении;
m 1(x, y), m2(x, y) – яркость пикселя на первом и втором кадрах изображения.
При этом значение функции ежесекундно обнуляется m12(х, у) = 0. В результате функция накапливает происходящие в течении одной секунды изменения яркости на видеоизображении. Перед обнулением функции фиксируются только те координаты пикселей на изображении, при которых накопленные значения функции совпадают с заданной частотой мигания источников света.
Затем изображение на кадре сегментируется на изолированные области, состоящие из связанных друг с другом пикселей. Алгоритм поиска связанных областей заключается в построчном сканировании изображения и поиске связей между пикселями. При этом каждый пиксель, расположенный внутри области, имеет 8 связей с соседними пикселями. Если пиксель имеет меньше связей, значит он расположен на границе области источника света. В том случае, если обнаруживается пиксель, который одновременно может быть связан с несколькими пикселями из разных областей, то эти области объединяются в одну. Таким образом, изображение сегментируется на множество областей, принадлежащих различным объектам.
После обнаружения всех источников света на видеоизображении, для каждого источника света, представленного сегментом на изображении, определяются координаты центров на плоскости изображении, как среднее арифметическое значений координат всех составляющих сегмент пикселей. По теоремам геометрии треугольника вычисляются углы, образованные лучом, идущим от центрального источника света через передний главный фокус объектива видеокамеры и лучами, идущими от двух крайних источников света через передний главный фокус объектива видеокамеры. Также вычисляется угол, образованный прямой соединяющей крайний левый с центральным источником света в поле зрения видеокамеры и лучом, идущим от центрального источника света через передний главный фокус объектива видеокамеры. Затем вычисляется расстояние до каждого источника света, представленного сегментом на изображении, и определяется дальность до геометрического центра, образованного этими источниками света.
В качестве примера, рассмотрим четырехугольник ACBF (Фиг. 2, a), образованный тремя источниками света A, B, C и передним главным фокусом объектива видеокамеры F. Также рассмотрим треугольники FA´C´ и FB´C´, образованные проецирующими лучами AF, CF и BF c плоскостью изображения 1. Высота этих треугольников равна фокусному расстоянию видеокамеры f. Применив теорему косинусов для треугольника FA´C´, получают выражение:
Из выражения (2), находят формулу для вычисления угла φ1:
Также применив теорему косинусов для треугольника FB´C´, получают выражение:

Из выражения (4), находят формулу для вычисления угла φ2:
Применив теорему синусов для треугольников ACF и BCF, получают следующую систему уравнений:
Решая систему уравнений (6), получают выражение:

Из выражения (7) находят формулу для вычисления угла φ3:
Длину отрезка AF вычисляют из выражения:
Длину отрезка CF вычисляют из выражения:
Длину отрезка BF вычисляют из выражения:
Геометрический центр точек A, B, C расположен в точке О. Длина отрезка OF вычисляется из выражения:
Выражение (12) после подстановки выражений (9-11) принимает следующий вид:

Угол между лучом, идущим от геометрического центра трех источников света O через главный фокус объектива видеокамеры F, и главной оптической осью объектива видеокамеры 3 (Фиг. 2, б) вычисляется из выражения:
Дальность до геометрического центра трех источников света можно определить из выражения:

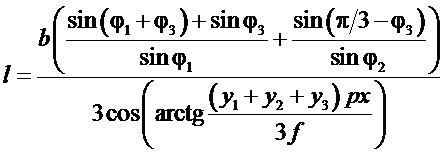
Подставив выражения (13, 14) в выражение (15) получают следующую формулу для определения дальности до геометрического центра трех расположенных в горизонтальной плоскости и равноудаленных друг от друга источников света:
Формулы (3, 5, 8, 16) можно записать в виде системы уравнений:
Таким образом, предлагаемый способ позволяет с помощью цифровой видеокамеры определить дальность до трех, расположенных в горизонтальной плоскости и равноудаленных друг от друга, источников света, мигающих с заданной частотой.
Источники информации
1. Европейский патент EP №0379425 A1, МПК G01S 5/16, на изобретение «System for determining the position of at least one target by means of triangulation»
2. Патент РФ № 2655467, МПК G01C 3/06, на изобретение «Способ измерения расстояния на цифровой видеокамере с помощью мишени».
Способ относится к области информационно-измерительных систем и может быть использован в устройствах компьютерного зрения, предназначенных для решения задач измерения дальности и ориентирования в пространстве. Данный способ позволяет с помощью цифровой видеокамеры измерять дальность по трем расположенным в горизонтальной плоскости и равноудаленным друг от друга источникам света, мигающим с заданной частотой. Посредством обработки отдельных кадров видеоизображения производится обнаружение требуемых источников света по заданной частоте изменения яркости. По теоремам геометрии треугольника вычисляются углы вхождения проецирующих лучей от источников света в объектив видеокамеры и определяется дальность до геометрического центра, образованного этими источниками света. Технический результат - увеличенный диапазон и точность определения дальности, возможность определять дальность при низком уровне естественного освещения. 2 ил.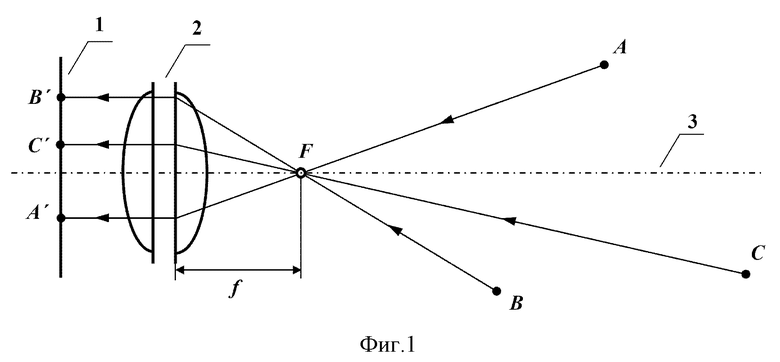
Способ определения дальности с помощью цифровой видеокамеры и трех расположенных в горизонтальной плоскости и равноудаленных друг от друга источников света, мигающих с заданной частотой, заключающийся в горизонтировании видеокамеры, чтобы плоскость изображения видеокамеры заняла вертикальное положение и все источники света находились в поле зрения видеокамеры, не перекрывая друг друга, обнаружении источников света на кадрах видеоизображения по частоте изменения яркости, вычислении углов вхождения проецирующих лучей от источников света в объектив видеокамеры, позволяющих определить дальность до геометрического центра, образованного этими источниками света, в соответствии с системой уравнений:
где b – расстояние между источниками света;
ϕ1, ϕ2 – углы, образованные проецирующим лучом от центрального источника света и проецирующими лучами от крайних источников света в поле зрения видеокамеры, соответственно;
ϕ3 – угол, образованный прямой, соединяющей крайний левый с центральным источником света в поле зрения видеокамеры, и проецирующим лучом от центрального источника света;
x 1, x2, x3 – абсциссы центров крайнего левого, центрального и крайнего правого источников света на видеоизображении, соответственно;
y 1, y2, y3 – ординаты центров крайнего левого, центрального и крайнего правого источников света на видеоизображении, соответственно;
f – фокусное расстояние видеокамеры;
рх – физический размер пикселя на изображении.
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТЕЙ ДО ОБЪЕКТОВ ПО ИЗОБРАЖЕНИЯМ С ЦИФРОВЫХ ВИДЕОКАМЕР | 2016 |
|
RU2626051C2 |
| СПОСОБ БЕСКОНТАКТНЫХ ИЗМЕРЕНИЙ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ОБЪЕКТА В ПРОСТРАНСТВЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2551396C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОСТРАНСТВЕННОГО РАССТОЯНИЯ МЕЖДУ МАЛОРАЗМЕРНЫМИ ОБЪЕКТАМИ | 2019 |
|
RU2734070C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕК ОБЪЕКТОВ, НАХОДЯЩИХСЯ В ЖИДКОСТИ | 2003 |
|
RU2248523C1 |
| US 5432594 A, 11.07.1995 | |||
| JP 2004340840 A, 02.12.2004 | |||
| KR 20180037241 A, 11.04.2018. | |||

