ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области информационно-измерительной техники, а именно к автоматизированным многопараметрическим системам контроля. Способ относится к системам контроля технического состояния беспилотных транспортных средств (БТС) для обеспечения безопасности их полета, но может быть применен и в других автономных технических системах.
УРОВЕНЬ ТЕХНИКИ
Из предшествующего уровня техники известен СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ МНОГОПАРАМЕТРИЧЕСКОГО ОБЪЕКТА (см. патент RU №2373650, опубл. 20.11.2009 г.), характеризующий контроль состояния многопараметрического объекта (МПО), заключающийся в том, что предварительно задают совокупность N≥2 структурных элементов объекта (СЭО) и M≥N параметров, характеризующих их состояние, измеряют и запоминают измеренные параметры СЭО, определяют характеристики состояния МПО в процессе функционирования, результаты которых документируют и принимают по ним решение о состоянии МПО, дополнительно для N однотипных СЭО предварительно задают стандартные значения их параметров Пст. Также задают допустимые отклонения ΔПдоп параметров от стандартных значений и предельно допустимую разность  между максимальным и минимальным значениями для каждого из m контролируемых параметров. Для определения характеристик состояния МПО считывают ранее запомненные значения параметров
между максимальным и минимальным значениями для каждого из m контролируемых параметров. Для определения характеристик состояния МПО считывают ранее запомненные значения параметров  и Пmi, сравнивают их между собой и в каждой группе однотипных СЭО вычисляют разности (отклонения) ΔПmi измеренных значений m-го параметра от его стандартного значения
и Пmi, сравнивают их между собой и в каждой группе однотипных СЭО вычисляют разности (отклонения) ΔПmi измеренных значений m-го параметра от его стандартного значения  . Считывают ранее запомненные экстремальные значения
. Считывают ранее запомненные экстремальные значения и
и  , сравнивают их и по результатам сравнения определяют разности ΔПmij между максимальным
, сравнивают их и по результатам сравнения определяют разности ΔПmij между максимальным  и минимальным
и минимальным  уровнями измеренных значений m-го параметра. Затем сравнивают вычисленные характеристики ΔПmi и ΔПmij с предварительно заданными их значениями
уровнями измеренных значений m-го параметра. Затем сравнивают вычисленные характеристики ΔПmi и ΔПmij с предварительно заданными их значениями  и
и  После этого измеренные параметры и вычисленные характеристики документируют. Если
После этого измеренные параметры и вычисленные характеристики документируют. Если  и
и  , то состояние МПО принимают как исправное и повторяют цикл измерений параметров. Если
, то состояние МПО принимают как исправное и повторяют цикл измерений параметров. Если  и/или
и/или  , то состояние МПО характеризуют как неисправное и дополнительно документируют информацию о параметрах и характеристиках i-гo структурного элемента.
, то состояние МПО характеризуют как неисправное и дополнительно документируют информацию о параметрах и характеристиках i-гo структурного элемента.
Недостатком известного способа контроля состояния многопараметрического объекта, каким является БТС, является то, что неисправность определяется при достижении измеряемого параметра предельно допустимого значения, то есть фиксирует, что техническое устройство достигло аварийной ситуации, следовательно, не позволяет, определять остаточный ресурс и предотказное состояние контролируемого блока технического устройства и предотвратить аварийную ситуацию.
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Задачей заявляемого способа многопараметрического автоматизированного контроля технического состояния БТС является то, что выявляется тенденция и характер изменения измеряемого параметра, которые используются для вычисления времени достижения параметром своего критического состояния, что позволяет определить остаточный ресурс и предотказное состояние контролируемого блока технического устройства, а это позволит предотвратить аварийную ситуацию.
Технический результат заявляемого способа обеспечивается за счет того, что предварительно определяют перечень N (i = 1, 2, 3, N) критических параметров, которые характеризуют техническое состояние БТС и его отказ. В документации задают для всех N критических параметров теоретические ресурсные кривые, которые определяются для каждого критического параметра в результате заводских ресурсных испытаний и заносятся в документацию и в память БТС (на фиг. 1-3 - это изменение i-го контролируемого критического параметра по результатам измерения при эксплуатации (эталонная ресурсная кривая)). В документации также задаются порог параметра, который характеризует отказ (xiотк) и порог параметра, который характеризует предотказное состояние (xiпр), а также времена (Tiотк), по каждому параметру, которые характеризуют ресурс и окончание эксплуатации БТС.
Для определения наступления критического времени, в процессе эксплуатации осуществляют измерение текущей величины каждого i-го контролируемого критического параметра, а также измерение (вычисление) средней скорости изменения этих критических контролируемых параметров на выбранных участках времени.
Оценка технического состояния осуществляется по следующему алгоритму: делается сравнение отклонения измеряемого контролируемого критического параметра с расчетным значением.
Если:
1. Отклонение измеряемого контролируемого критического параметра меньше отклонения расчетного в заданный момент времени, то осуществляется эксплуатация до истечения ресурса Tiотк (см. фиг. 1). При достижении времени эксплуатации Tiотк и значения параметра хi00, ресурсная кривая уточняется, по которой остаточный ресурс характеризуется величиной Тi1 (см. фиг. 1). Уточнение (продление) ресурса повторяется до тех пор, пока значение параметра не достигнет величины хiпр, которое характеризуется временем предотказного состояния Tiпр (см. фиг. 1).
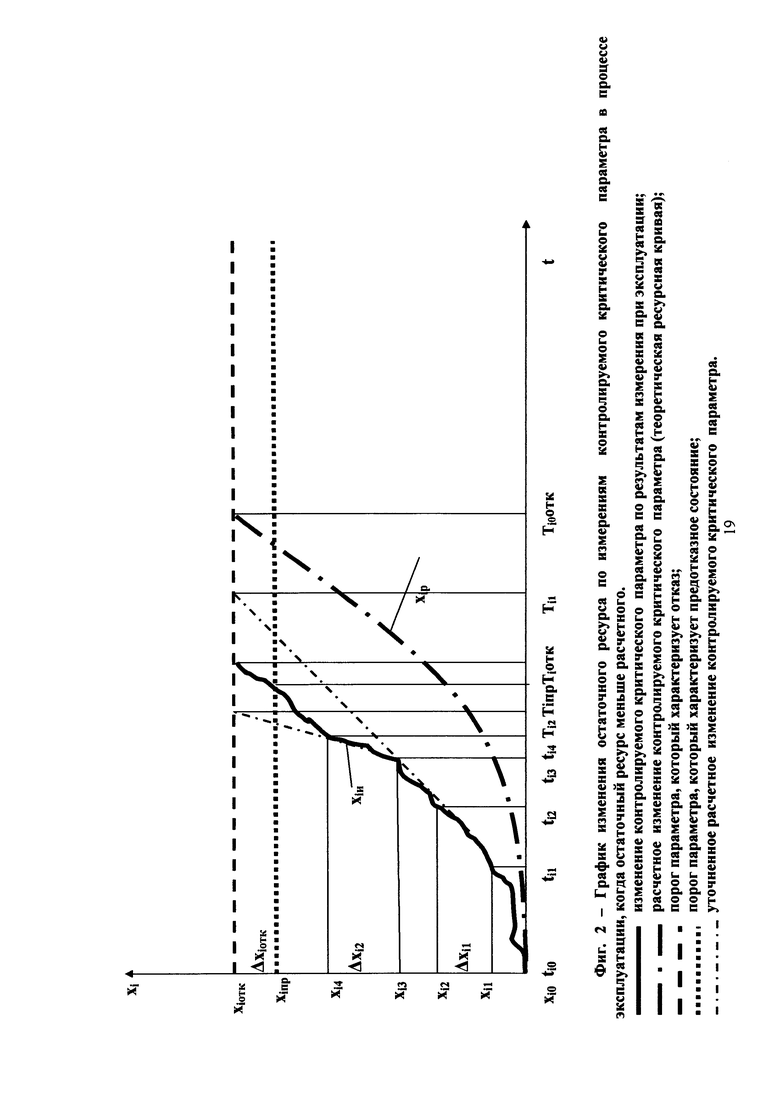
2. Отклонение измеряемого контролируемого критического параметра больше отклонения расчетного в заданный момент времени (см. фиг. 2). Для уточнения величины остаточного ресурса осуществляется вычисление средней скорости. Предполагаем, что в дальнейшем изменение измеряемого контролируемого критического параметра будет осуществляться с такой скоростью. На фиг. 2 показано, что при вычислении на интервале t1 - t2 средней скорости можно ожидать достижения хiотк к моменту Тi1 - это и будет уточненное время достижения отказа. При дальнейшем вычислении уже на интервале t3 - t4 средней скорости можно ожидать достижения xiотк к моменту Тi1 - это уже новое уточненное время достижения отказа. Такой процесс уточнения будет осуществляться непрерывно до момента достижения контролируемого критического параметра значения xiпр, которое характеризуется временем предотказного состояния Tiпр (см. фиг. 2).
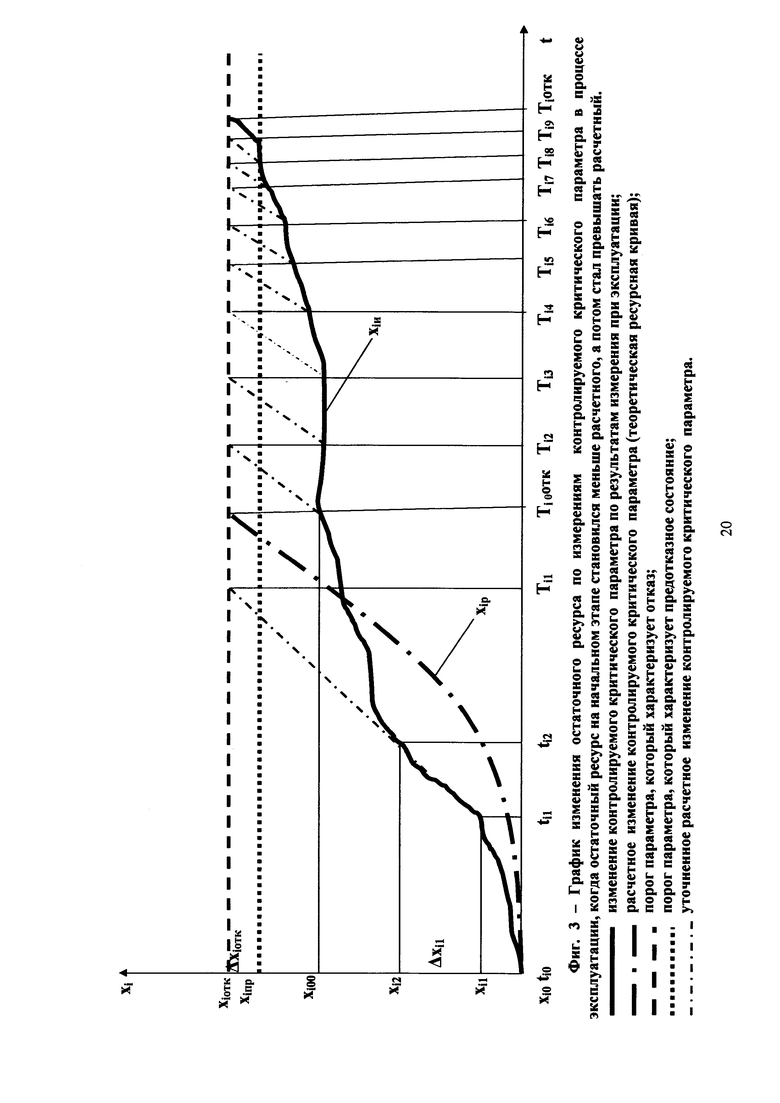
3. График изменения остаточного ресурса по измерениям контролируемого критического параметра в процессе эксплуатации, когда остаточный ресурс на начальном этапе становился меньше расчетного, а потом стал превышать расчетный, представлен на фиг. 3. Этот случай является объединением двух предыдущих.
Такой способ контроля технического состояния позволит осуществлять безаварийную эксплуатацию БТС в автономном режиме (для беспилотного воздушного судна (БВС) в зонах отсутствия связи с наземными службами управления полетом.
Проведенный анализ технических решений позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных носителях информации, что указывает на соответствие заявленного способа условию патентоспособности ''новизна''.
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности ''изобретательский уровень''.
Это позволит эффективно решить проблемы осуществления безопасной эксплуатации БТС.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 - График изменения остаточного ресурса по измерениям контролируемого критического параметра в процессе эксплуатации, когда остаточный ресурс превышает расчетный.
Фиг. 2 - График изменения остаточного ресурса по измерениям контролируемого критического параметра в процессе эксплуатации, когда остаточный ресурс меньше расчетного.
Фиг. 3 - График изменения остаточного ресурса по измерениям контролируемого критического параметра в процессе эксплуатации, когда остаточный ресурс на начальном этапе становился меньше расчетного, а потом стал превышать расчетный.
ПОДРОБНОЕ ОПИСАНИЕ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Заявленный способ поясняется рисунками, на которых показаны, как осуществляется определение остаточного ресурса и предотказное состояние контролируемого блока технического устройства, что позволит предотвратить аварийную ситуацию.
Технический результат заявляемого способа обеспечивается за счет того, что предварительно определяют перечень N (i=1, 2, 3, N) критических параметров, которые характеризуют техническое состояние БТС и его отказ. В документации задают для всех N критических параметров теоретические ресурсные кривые (на фиг. 1-3 теоретические ресурсные кривые показаны линиями ), которые определяются для каждого i-го контролируемого критического параметра в результате заводских ресурсных испытаний и заносятся в документацию и в память БТС. В документации также задаются порог i-го контролируемого критического параметра, который характеризует отказ хiотк (на фиг. 1-3 показан линиями
), которые определяются для каждого i-го контролируемого критического параметра в результате заводских ресурсных испытаний и заносятся в документацию и в память БТС. В документации также задаются порог i-го контролируемого критического параметра, который характеризует отказ хiотк (на фиг. 1-3 показан линиями  ) и порог i-го контролируемого критического параметра, который характеризует предотказное состояние xiпр (на фиг. 1-3 показан линиями
) и порог i-го контролируемого критического параметра, который характеризует предотказное состояние xiпр (на фиг. 1-3 показан линиями  ), а также времена (Тi0отк), по каждому параметру, которые характеризуют ресурс и окончание эксплуатации БТС. Для определения наступления критического времени в процессе эксплуатации осуществляют измерение текущей величины каждого i-го контролируемого критического параметра, а также измерение (вычисление) средней скорости изменения этих критических контролируемых параметров на выбранных участках времени.
), а также времена (Тi0отк), по каждому параметру, которые характеризуют ресурс и окончание эксплуатации БТС. Для определения наступления критического времени в процессе эксплуатации осуществляют измерение текущей величины каждого i-го контролируемого критического параметра, а также измерение (вычисление) средней скорости изменения этих критических контролируемых параметров на выбранных участках времени.
Оценка технического состояния осуществляется по следующему алгоритму: делается сравнение отклонения измеряемого контролируемого критического параметра с расчетным значением. Если:
1. Отклонение измеряемого контролируемого критического параметра меньше отклонения расчетного в заданный момент времени, то осуществляется эксплуатация до истечения ресурса Tiотк (см. фиг. 1). При достижении времени эксплуатации Tiотк и значения параметра хi00 ресурсная кривая уточняется, по которой остаточный ресурс характеризуется величиной Тi1 (см. фиг. 1). Уточнение (продление) ресурса повторяется до тех пор, пока значение параметра не достигнет величины xiпр, которое характеризуется временем предотказного состояния Тiпр (см. фиг. 1).
2. Отклонение измеряемого контролируемого критического параметра больше отклонения расчетного в заданный момент времени (см. фиг. 2). Для уточнения величины остаточного ресурса осуществляется вычисление средней скорости. Предполагаем, что в дальнейшем изменение измеряемого контролируемого критического параметра будет осуществляться с такой скоростью. На фиг. 2 показано, что при вычислении на интервале t1 - t2 средней скорости можно ожидать достижения хiотк к моменту Тi1 - это и будет уточненное время достижения отказа. При дальнейшем вычислении уже на интервале t3 - t4 средней скорости можно ожидать достижения хiотк к моменту Ti2 - это уже новое уточненное время достижения отказа. Такой процесс уточнения будет осуществляться непрерывно до момента достижения контролируемого критического параметра значения xiпр, которое характеризуется временем предотказного состояния Тiпр (см. фиг. 2).
3. График изменения остаточного ресурса по измерениям контролируемого критического параметра в процессе эксплуатации, когда остаточный ресурс на начальном этапе становился меньше расчетного, а потом стал превышать расчетный, представлен на фиг. 3. Этот случай является объединением двух предыдущих.
Такой способ контроля технического состояния позволит осуществлять безаварийную эксплуатацию БТС в автономном режиме (для беспилотного воздушного судна (БВС) в зонах отсутствия связи с наземными службами управления полетом).
Проведенный анализ технических решений позволил установить, что аналоги, характеризующиеся совокупностью признаков, тождественных всем признакам заявленного технического решения, отсутствуют в известных носителях информации, что указывает на соответствие заявленного способа условию патентоспособности ''новизна''.
Результаты поиска известных решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками, показали, что они не следуют явным образом из уровня техники. Из уровня техники также не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата. Следовательно, заявленное изобретение соответствует условию патентоспособности ''изобретательский уровень''.
Это позволит эффективно решить проблемы осуществления безопасной эксплуатации БТС.
Реализация предлагаемого способа, позволяющего определять остаточный ресурс и предотказное состояние контролируемого блока технического устройства, продемонстрирована рисунками.
Фиг. 1 - График изменения остаточного ресурса по измерениям контролируемого критического параметра в процессе эксплуатации, когда остаточный ресурс превышает расчетный.
Фиг. 2 - График изменения остаточного ресурса по измерениям контролируемого критического параметра в процессе эксплуатации, когда остаточный ресурс меньше расчетного.
Фиг. 3 - График изменения остаточного ресурса по измерениям контролируемого критического параметра в процессе эксплуатации, когда остаточный ресурс на начальном этапе становился меньше расчетного, а потом стал превышать расчетный. На рисунках линиями показаны:
 изменение контролируемого критического параметра по результатам измерения при эксплуатации;
изменение контролируемого критического параметра по результатам измерения при эксплуатации;
 расчетное изменение контролируемого критического параметра (теоретическая ресурсная кривая);
расчетное изменение контролируемого критического параметра (теоретическая ресурсная кривая);
 порог параметра, который характеризует отказ;
порог параметра, который характеризует отказ;
 порог параметра, который характеризует предотказное состояние;
порог параметра, который характеризует предотказное состояние;
 уточненное расчетное изменение контролируемого критического параметра.
уточненное расчетное изменение контролируемого критического параметра.
Реализация заявляемого способа многопараметрического автоматизированного контроля технического состояния БТС осуществляется следующим образом.
1. Предварительно определяют перечень N (i = 1, 2, 3, N) критических параметров, которые характеризуют техническое состояние БТС и его отказ. В документации задают для всех N критических параметров теоретические ресурсные кривые (на фиг. 1-3 теоретические ресурсные кривые показаны линиями  ), которые определяются для каждого i-го контролируемого критического параметра в результате заводских ресурсных испытаний и заносятся в документацию и в память БТС. В документации также задаются порог i-го контролируемого критического параметра, который характеризует отказ хiотк (на фиг. 1-3 показан линиями
), которые определяются для каждого i-го контролируемого критического параметра в результате заводских ресурсных испытаний и заносятся в документацию и в память БТС. В документации также задаются порог i-го контролируемого критического параметра, который характеризует отказ хiотк (на фиг. 1-3 показан линиями  ) и порог i-го контролируемого критического параметра, который характеризует предотказное состояние xiпр (на фиг. 1-3 показан линиями
) и порог i-го контролируемого критического параметра, который характеризует предотказное состояние xiпр (на фиг. 1-3 показан линиями  ), а также времена (Тi0отк), по каждому параметру, которые характеризуют ресурс и < окончание эксплуатации БТС.
), а также времена (Тi0отк), по каждому параметру, которые характеризуют ресурс и < окончание эксплуатации БТС.
2. В процессе эксплуатации осуществляется измерение всех контролируемых критических параметров (ниже будет описана процедура для i-го контролируемого критического параметра, для других параметров процедура аналогично).
3. Осуществляется сравнение измеренного контролируемого критического параметра xi с идентичным параметром, занесенным в память при заводских настройках.
4. Осуществляется сравнение текущего значения параметра xi и xiпр.
5. Рассматриваются два случая:
xi < xiпр или xi ≥ xiпр.
6. Если xi ≥ xiпр, то имеет место предотказное состояние и должна быть прекращена эксплуатация.
7. Если хi < хiпр, то процесс эксплуатации продолжается.
8. Осуществляется сравнение измеренного контролируемого критического параметра хiи с расчетным параметром xip, занесенным в память при заводских настройках (в одинаковые моменты времени).
9. Рассматриваются два случая:
xiи < xip или xiи ≥ xip.
10. Если xiи < xip, то процесс вычислений продолжается по следующему алгоритму.
10.1. Осуществляется сравнение текущего времени эксплуатации с Тi0отк.
10.2. Если t < Ti0отк, то процесс эксплуатации продолжается.
10.3. Если t = Ti0отк, то в память заносятся обновленные данные:
11. Процесс вычислений продолжается по алгоритму п. 10, но с обновленными исходными данными (этот процесс продолжается до выполнения условия xiи≥xip, с обновлением исходных данных в моменты Ti2 и Тi3 до момента выполнения условия xiи≥xiпp (предотказное состояние), либо выполнения условия xiи≥xip.
12. Если xiи≥xip, то процесс вычислений продолжается по следующему алгоритму.
13. Осуществляется вычисление скорости изменения (роста) параметра xiи (для наглядности см. фиг. 2). Для уточнения величины остаточного ресурса осуществляется вычисление средней скорости. Предполагаем, что в дальнейшем изменение измеряемого контролируемого критического параметра будет осуществляться с такой скоростью. На фиг. 2 показано, что при вычислении на интервале t1 - t2 средней скорости можно ожидать достижения xiотк к моменту Тi1 - это и будет уточненное время достижения отказа. При дальнейшем вычислении уже на интервале t3 - t4 средней скорости можно ожидать достижения xiотк к моменту Ti2 - это уже новое уточненное время достижения отказа. Такой процесс уточнения будет осуществляться непрерывно до момента достижения контролируемого критического параметра значения xiпр, которое характеризуется временем предотказного состояния Тiпр.
Случай, когда остаточный ресурс на начальном этапе становился меньше расчетного, а потом стал превышать расчетный, представлен на фиг. 3. Этот случай является объединением двух предыдущих.
Поставленная цель достигается тем, что в известном способе контроля состояния многопараметрического объекта предварительно задают совокупность контролируемых параметров, характеризующих их состояние, измеряют и запоминают измеренные контролируемые параметры многопараметрического объекта, определяют характеристики состояния многопараметрического объекта в процессе его функционирования, результаты которых документируют и принимают по ним решение о состоянии многопараметрического объекта, дополнительно задают предварительный перечень N критических параметров xi (i=1, 2, …N), а также задают N критических эталонных ресурсных кривых xiэ(t), характеризующих эталонное изменение критических параметров xi от начального состояния xi0 до критического хi0отк, которые характеризуют отказ и эталонный ресурс Тi0отк, которые определяются для каждого критического параметра в результате заводских ресурсных испытаний и заносятся в документацию и в память БТС и характеризуют ресурс и окончание эксплуатации БТС, а для оценки остаточного ресурса и предотказного состояния осуществляется сравнение отклонения измеряемого контролируемого критического параметра xi с эталонным значением xiэ, тогда, если отклонение измеряемого контролируемого критического параметра xi меньше эталонного значения xiэ, то осуществляется эксплуатация до истечения ресурса Тiотк, а при достижении времени эксплуатации Тiотк, при котором значением xi принимает значение равное xi00, причем эталонная ресурсная кривая равна хi00 в момент времени ti00, тогда эталонная ресурсная кривая уточняется,
а уточнение (продление) ресурса повторяется до тех пор, пока значение параметра не достигнет величины xiпр, которое характеризуется временем предотказного состояния Tiпр, а когда отклонение измеряемого контролируемого критического параметра xi становится больше эталонного значения xiэ, то для определения наступления критического времени Tiпр в процессе эксплуатации осуществляют измерение средней скорости изменения текущей величины i-го контролируемого критического параметра, при этом полагается, что в дальнейшем изменение измеряемого контролируемого критического параметра будет осуществляться с такой скоростью, по которой рассчитывается наступление критического времени Tiпр, и такой процесс уточнения осуществляется непрерывно до момента достижения контролируемого критического параметра значения xiпр, которое характеризуется временем предотказного состояния Tiпр, кроме того, в случае отклонения некритического контролируемого параметра за пределы допуска информация фиксируется для принятия решения по завершению цикла эксплуатации транспортного средства.

Изобретение относится к способу многопараметрического автоматизированного контроля технического состояния беспилотных транспортных средств (БТС). Способ заключается в том, что предварительно задают совокупность контролируемых параметров определенным образом, измеряют и запоминают контролируемые параметры, определяют характеристики состояния БТС в процессе его функционирования, оценивают остаточный ресурс и предотказное состояние определенным образом, документируют результаты, принимают решение о продлении или окончании эксплуатации БТС в случае достижения значения критического параметра. Обеспечивается безаварийная эксплуатация БТС в автономном режиме. 1 з.п. ф-лы, 3 ил.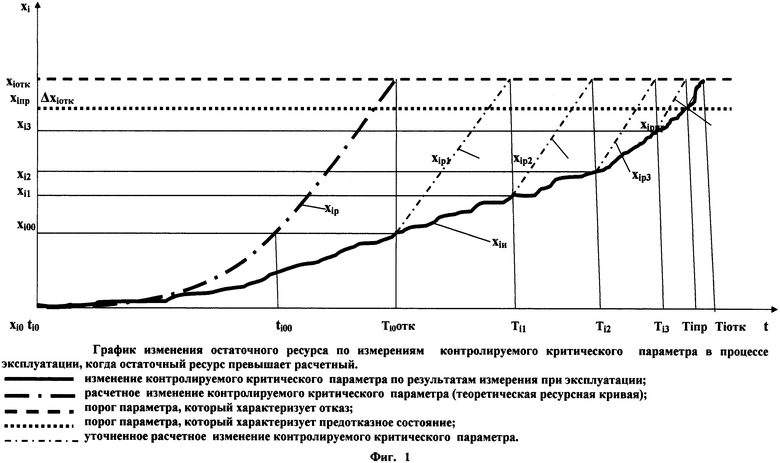
1. Способ многопараметрического автоматизированного контроля технического состояния беспилотных транспортных средств (БТС), заключающийся в том, что предварительно задают совокупность контролируемых параметров, характеризующих их состояние, измеряют и запоминают измеренные контролируемые параметры многопараметрического БТС, определяют характеристики состояния многопараметрического БТС в процессе его функционирования, результаты которых документируют и принимают по ним решение о состоянии многопараметрического БТС, отличающийся тем, что для предварительного перечня N критических параметров xi (i=1, 2, … N) задают N критических эталонных ресурсных кривых xiэ(t), характеризующих эталонное изменение критических параметров xi от начального состояния xi0 до критического xi0отк, которые характеризуют отказ и эталонный ресурс Ti0отк, которые определяются для каждого критического параметра в результате заводских ресурсных испытаний и заносятся в документацию и в память БТС и характеризуют ресурс и окончание эксплуатации БТС, а для оценки остаточного ресурса и предотказного состояния осуществляется сравнение отклонения измеряемого контролируемого критического параметра xi с эталонным значением xiэ, тогда, если отклонение измеряемого контролируемого критического параметра xi меньше эталонного значения xiэ, то осуществляется эксплуатация до истечения ресурса Tiотк, а при достижении времени эксплуатации Tiотк, при котором значением xi принимает значение равное xi00, причем эталонная ресурсная кривая равна xi00 в момент времени ti00, тогда эталонная ресурсная кривая уточняется,
вместо ti0 заносится Ti0отк,
вместо xi0 заносится xi00,
вместо Ti0отк заносится Ti1=Ti0отк+ti00,
а уточнение (продление) ресурса повторяется до тех пор, пока значение параметра не достигнет величины xiпр, которое характеризуется временем предотказного состояния Tiпр, а когда отклонение измеряемого контролируемого критического параметра xi становится больше эталонного значения xiэ, то для определения наступления критического времени Tiпр в процессе эксплуатации осуществляют измерение средней скорости изменения текущей величины i-го контролируемого критического параметра, при этом полагается, что в дальнейшем изменение измеряемого контролируемого критического параметра будет осуществляться с такой скоростью, по которой рассчитывается наступление критического времени Tiпр, и такой процесс уточнения осуществляется непрерывно до момента достижения контролируемого критического параметра значения xiпр, которое характеризуется временем предотказного состояния Tiпр.
2. Способ по п. 1, отличающийся тем, что в случае отклонения некритического контролируемого параметра за пределы допуска информация фиксируется для принятия решения по завершению цикла эксплуатации транспортного средства.
| RU 2015127333 A, 12.01.2017 | |||
| СПОСОБ ОЦЕНКИ И ПОДДЕРЖАНИЯ НАДЕЖНОСТИ САМОЛЕТОВ И ИХ СИЛОВЫХ УСТАНОВОК ПРИ ЭКСПЛУАТАЦИИ АВИАЦИОННОЙ ТЕХНИКИ ПО СОСТОЯНИЮ | 1993 |
|
RU2038991C1 |
| СПОСОБ ОЦЕНКИ ФИЗИЧЕСКОГО ИЗНОСА АВИАЦИОННОЙ ТЕХНИКИ | 2015 |
|
RU2589369C1 |
| US 20160191307 A1, 30.06.2016 | |||
| СПОСОБ УВЕЛИЧЕНИЯ РЕСУРСА БЕЗОПАСНОЙ ЭКСПЛУАТАЦИИ МЕТАЛЛИЧЕСКИХ КОНСТРУКЦИЙ | 2004 |
|
RU2279651C1 |

