Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано для ограждения места работ и автоматизированного оповещения работающих на железнодорожных путях о приближении железнодорожного подвижного состава без использования сигналистов.
Известен способ оповещения работающих на железнодорожных путях, реализованный системой оповещения работников о приближении железнодорожного подвижного состава, заключающийся в том, что перед началом работ по обе стороны места работ на каждом пути устанавливают датчики обнаружения подвижного состава на таком расстоянии от границ места работ, при котором движущийся подвижной состав подойдет к границе места работ не ранее чем за 60 секунд, при обнаружении подвижного состава датчики передают информацию о его приближении по кабелю на размещенный на обочине пути системный блок со встроенной сигнальной радиостанцией, который передает сигнал оповещения по радиоканалу на центральный блок управления, находящийся под контролем центрального сигналиста и размещенный в центре места работ, центральный блок управления транслирует сигнал оповещения на коллективные переносные оповещатели, установленные на месте проведения работ, по меньшей мере, один из которых выполнен для установки на путевой машине, и индивидуальные оповещатели, предназначенные для оповещения каждого работающего на пути (RU 137532 U1, 20.02.2014).
Известен способ оповещения о приближении железнодорожного подвижного состава, заключающийся в том, что датчики обнаружения подвижного состава, расположенные на железнодорожных путях по обе стороны от места проведения работ, с каждой стороны по два датчика на одном пути на расстоянии друг от друга, передают на соответствующий системный блок контрольные сигналы и сигналы оповещения при обнаружении датчиками подвижного состава, системные блоки передают полученные сигналы по радиоканалу на центральный блок управления, с помощью которого сигналы передают по радиоканалу на коллективные и индивидуальные оповещатели, при этом передачу сигнала оповещения от системного блока на центральный блок управления осуществляют только при передаче на системный блок сигнала оповещения от обоих датчиков, установленных на одном пути, и при последовательности передачи сигналов оповещения от этих датчиков, соответствующих направлению в сторону места проведения работ, а при поступлении на системный блок сигналов оповещения только от одного из двух датчиков и при отсутствии сигналов оповещения от второго датчика не осуществляют передачу сигналов оповещения от системного блока на центральный блок управления, при этом центральный блок управления регистрирует отказ соответствующего направления системы оповещения (RU 2606755 С1, 10.01.2015 г.).
Причем контроль функционирования датчиков обнаружения подвижного состава и системных блоков в автоматическом режиме осуществляет центральный блок управления под контролем сигналиста, находящегося на месте проведения работ, который в случае нарушения их функционирования сообщает об этом сигналисту ограждения и при получении соответствующего сообщения от него ручным способом включает сигнал оповещения и передает его по радиоканалу на коллективные и индивидуальные оповещатели.
Недостатком известных способов является то, что при наличии автоматизации процесса оповещения работающих о приближении подвижного состава для его реализации требуются тем не менее сигналисты, обеспечивающие ограждение границ участка работ. Необходимость ограждения границ участка работ вызвана тем, что при возникновении на месте работ препятствий для движения подвижного состава руководитель работ должен сообщить об этом по радио сигналисту, находящемуся на расстоянии тормозного пути от границ участка работ, который с помощью развернутого красного флага сообщает машинисту подвижного состава на необходимость остановки у границ участка работ.
Техническим результатом изобретения является повышение безопасности работающих и безопасности движения поездов за счет автоматизации, обеспечивающей уменьшение влияния человеческого фактора при организации ограждения места проведения работ и оповещения работающих о приближении к месту работ подвижного состава
Технический результат достигается тем, что способ ограждения места проведения работ и оповещения работающих на железнодорожных путях заключается в том, что перед началом работ на подошве рельса железнодорожного пути по обе стороны от границ места работ на заданном расстоянии устанавливают датчики обнаружения подвижного состава, каждый из которых снабжен радиостанцией, а также на заданном расстоянии по обе стороны от границ места работ у ремонтируемого пути устанавливают переносные устройства ограждения, выполненные в виде сигнальных радиоуправляемых устройств ограждения, а на месте работ - коллективный переносный сигнализатор, обеспечивающий взаимодействие по радиоканалу с радиостанциями датчиков обнаружения подвижного состав и сигнальными радиоуправляемыми устройствами ограждения, коллективный переносный сигнализатор в автоматическом режиме передает сигналы, активизирующие работу датчиков обнаружения подвижного состава, которые при отсутствии подвижного состава формируют контрольные сигналы, а при обнаружении подвижного состава - сигналы оповещения и передают их коллективному переносному сигнализатору, который в автоматическом режиме осуществляет их воспроизведение в виде соответствующих тональных и оптических сигналов контроля и сигналов оповещения, а при отсутствии контрольных сигналов включает аварийную сигнализацию и информирует об отказе конкретного датчика обнаружения подвижного состава, причем при наличии препятствий движения на месте проведения работ, а также при их отсутствии посредством коллективного переносного сигнализатора в ручном режиме задают соответствующий управляющий сигнал, который передают по радиоканалу сигнальным радиоуправляемым устройствам ограждения для формирования запрещающего показания или разрешающего показания, при этом сигнальные радиоуправляемые устройства ограждения выполнены с возможностью контроля сигнальных показаний с последующей передачей результатов контроля по радиоканалу на коллективный переносный сигнализатор, который в автоматическом режиме сравнивает их с заданным управляющим сигналом и при совпадении формирует оптический сигнал, подтверждающий показания каждого сигнального радиоуправляемого устройства ограждения, а при несовпадении включает аварийную сигнализацию в виде соответствующего оптического и тонального сигналов тревоги.
Коллективный переносный сигнализатор выполнен с возможность организации переговоров руководителя работ с машинистом локомотива приближающегося к месту проведения работ подвижного состава по каналу поездной радиосвязи.
Руководитель работ задает режим функционирования сигнальных радиоуправляемых устройств ограждения ручным способом посредством коллективного переносного сигнализатора или дистанционно с помощью пульта дистанционного управления коллективным переносным сигнализатором.
При проведении работ с применением, по меньшей мере, одной путевой машины на месте проведения работ устанавливают коллективные переносные оповещатели работающих, по меньшей мере, один из которых выполнен с возможностью установки на путевой машине, работающих снабжают индивидуальными носимыми оповещателями, при этом коллективный переносный сигнализатор в автоматическом режиме по радиоканалу транслирует сигналы контроля и оповещения на коллективные переносные оповещатели работающих и индивидуальные носимые оповещатели, которые воспроизводят их в виде соответствующих тональных и оптических сигналов.
При этом коллективный переносный сигнализатор взаимодействует с сигнальными радиоуправляемыми устройствами ограждения, коллективными переносными оповещателями работающих, индивидуальными носимыми оповещателями работающих и радиостанциями датчиков обнаружения подвижного состава в одном частотном радиоканале в выделенном для каждого из них временном интервале.
Сигнальное радиоуправляемое устройство ограждения выполнено в виде сигнализатора, включающего излучатели красного и желтого цвета, контроллер, фотоприемники для анализа цвета излучения излучателей, радиостанцию и блок питания в виде аккумуляторной батареи, при этом выходы контроллера подключены к входам излучателей, входы - к выходам фотоприемников, а вход/выход - к выходу/входу радиостанции, причем оптический сигнализатор закреплен на штанге, вертикально установленной на пластине с отверстиями для размещения замков запирания, и снабжен датчиком наклона.
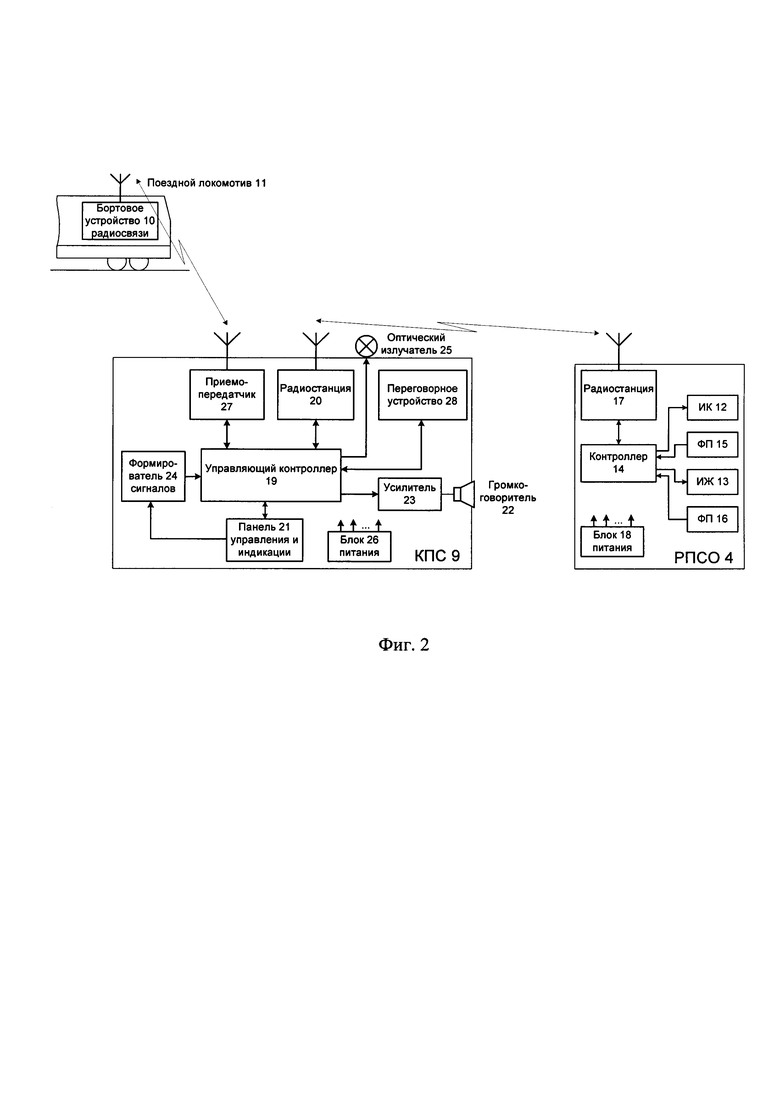
Коллективный переносный сигнализатор содержит радиостанцию, управляющий контроллер, вход/выход которого подключен к выходу/входу радиостанции, панель индикации и управления, подключенную входами/выходами к другим выходам/входам управляющего контроллера, громкоговоритель, соединенный через усилитель с соответствующим выходом управляющего контроллера, формирователь управляющих сигналов, включенный между управляющим выходом панели управления и индикации и другим входом управляющего контроллера, другим выходом подключенного к оптическому излучателю, и блок питания.
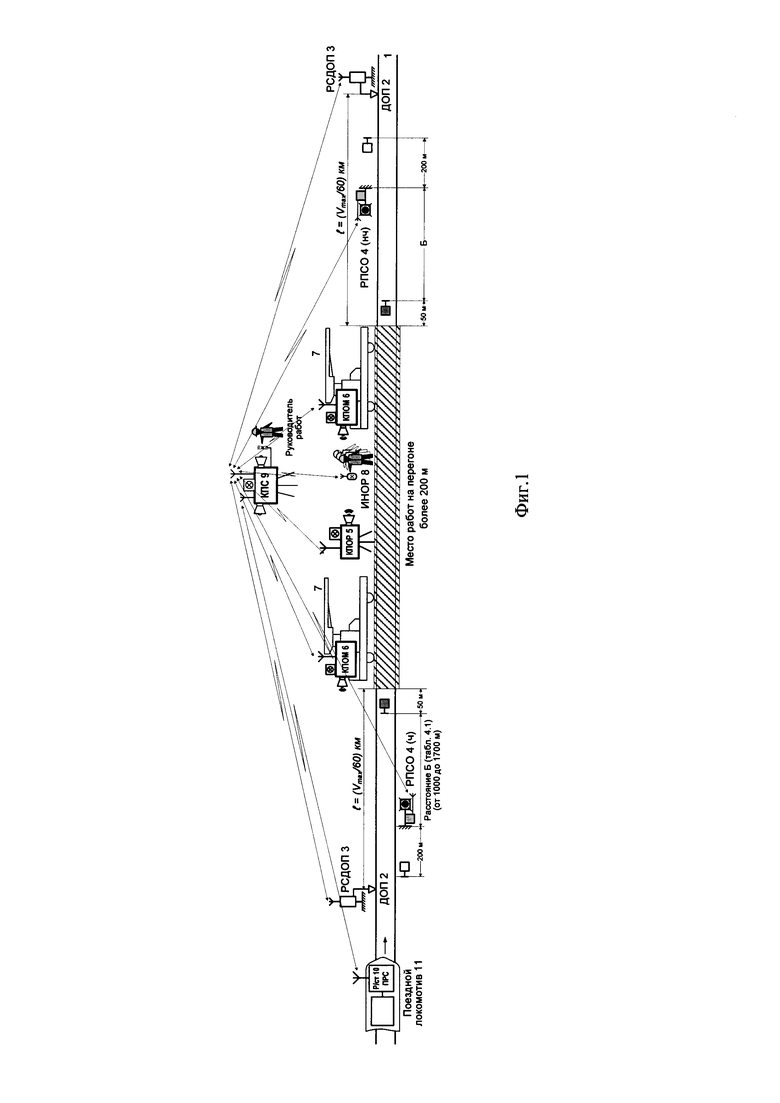
Изобретение поясняется чертежами на фиг. 1 и 2. На фиг. 1 представлена структурная схема системы ограждения места проведения работ и оповещения работающих на железнодорожных путях, реализующей один из вариантов выполнения предлагаемого способа, на фиг.2 - структурная схема коллективного переносного сигнализатора, взаимодействующего с радиоуправляемым переносным устройством ограждения.
Система ограждения места проведения работ и оповещения работающих на железнодорожных путях содержит установленные на подошве рельса железнодорожного пути 1 на заданном расстоянии по обе стороны от границ места проведения работ датчики 2 обнаружения подвижного состава (ДОП 2), каждый из которых снабжен радиостанцией 3 (РСДОП 3), переносные устройства ограждения, выполненные в виде сигнальных радиоуправляемых устройств 4 (РПСО 4), размещенные на заданном расстоянии по обе стороны от границ места проведения работ, и установленные на месте проведения работ коллективный переносной оповещатель 5 (КОПР5) работающих, коллективные переносные оповещатели 6 (КОПМ 6), установленные на путевых машинах 7, индивидуальные носимые оповещатели 8 (ИНОР8), приданные работающим, и коллективный переносной сигнализатор 9 (КПС9).
КПС9 выполнен с возможностью взаимодействия по радиоканалу с РСДОП 3 каждого ДОП 2, РПСО4, КОПР5, КОПМ6 и ИНОР8. Кроме того, КПС9 выполнен с возможность взаимодействия с бортовым устройством 10 радиосвязи локомотива 11 приближающегося к месту проведения работ подвижного состава для переговоров руководителя работ с машинистом по каналу поездной радиосвязи.
РПСО 4 выполнен в виде радиоуправляемого сигнального устройства ограждения, содержащего излучатели 12 и 13 красного и желтого цвета, контроллер 14, фотоприемники 15 и 16 для анализа излучения соответственно излучателей 12 и 13, радиостанцию 17 и блок 18 питания в виде аккумуляторной батареи, при этом выходы контроллера 14 подключены к входам излучателей 12 и 13, входы - к выходам фотоприемников 15 и 16, а вход/выход - к выходу/входу радиостанции 17.
РПСО 4 закреплен на штанге, установленной вертикально на пластине с отверстиями для установки замков запирания, и снабжен датчиком контроля наклона, выход которого к контроллеру 17 (на чертеже не показано).
РПСО 4 обеспечивает ограждение места работ на перегоне путем подачи машинисту локомотива 11 оптического сигнала, требующего остановки подвижного состава у границы участка работ, на котором имеется препятствие для движения, или сигнала, разрешающего движение с установленной скоростью.
КОПР 5 и КОПМ 6 обеспечивают воспроизведение звуковых сигналов контроля, звуковых и оптических сигналов оповещения при приеме соответствующих команд по радиоканалу от КПС 9, анализ качества воспроизводимых акустических сигналов и передачу по радиоканалу на КПС 9 информации о нормальном функционировании или об отказе.
Конструктивно КОПР 5 может быть выполнен в виде известного коллективного переносимого устройства оповещения, содержащего устройство управления, формирователь акустических сигналов контроля и оповещения, усилитель и громкоговоритель, а также оптический излучатель, подключенный к другому выходу устройства управления, анализирующее устройство, выходом соединенное с входом устройства управления, приемопередатчик, вход/выход которого подключен к выходу/входу устройства управления, и установленный в непосредственной близости к громкоговорителю микрофон, соединенный с входом анализирующего устройства (RU 2583011 C1, B61L 23/06, 27.06.2016 г.).
Анализ качества акустических сигналов контроля и оповещения КОПР 5 осуществляет с помощью микрофона, воспринимающего воспроизводимые сигналы, соединенного с входом анализирующего устройства, формирующего сообщения «Норма/Отказ», передаваемые на КПС 9 по радиоканалу.
КОПР 5 устанавливается на подставке и переносится, по мере перемещения бригады, одним из работающих.
Высота установки громкоговорителей КОПР 5 должна быть выбрана с учетом исключения возможности прямого воздействия на ухо работающего.
КОПМ 6 устанавливают на всех типах путевых машин и механизмов. При этом электропитание КПОМ 6 осуществляется от бортовой сети машин.
ИНОР 8 предназначен для индивидуального оповещения работающего на железнодорожных путях о приближении железнодорожного подвижного состава. ИНОР 8 обеспечиваются работающие, местонахождение которых или условия выполнения работ ухудшает условия восприятия оповещения от КПС 9, или от КОПР 5, или от КОПМ 6.
ИНОР 8 обеспечивает прием радиосигналов и воспроизведение звуковых сигналов контроля, звуковых и оптических сигналов оповещения при приеме по радиоканалу команд КПС 9. ИНОР 8 создает также вибрационный сигнал. Прием контрольных сигналов индицируется оптическим индикатором ИНОР 8.
КПС 9 предназначен для:
воспроизведения оптических сигналов контроля показаний управляемого по радио переносного сигнала ограждения (РПСО4);
- воспроизведения тонального и оптического сигнала тревоги при нарушении связи с РПСО4 или его отказе;
- воспроизведение акустических и оптических сигналов контроля и оптических и акустических сигналов оповещения о приближении подвижного состава;
- автоматической трансляции сигналов контроля и оповещения о приближении подвижного состава на КОПР 5, КОПМ 6 и ИНОР 8;
- ручного непосредственного или дистанционного управления РПСО4 для установления запрещающего или разрешающего показаний;
- мониторинга устройств КПО 5, КПОМ 6, РСДОП 4 и ДОП2;
- установления связи и ведение переговоров руководителя работ с машинистами поездных локомотивов по каналу поездной радиосвязи;
- ручного включения сигнала оповещения о приближении подвижного состава на КПС9 и на всех входящих в комплект КПО5, КПОМ6 и ИНО8;
- информирования акустическим сигналом о предельном разряде аккумуляторной батареи.
КПС 9 содержит управляющий контроллер 19, вход/выход которого подключен к выходу/входу радиостанции 20, панель 21 индикации и управления, подключенную входами/выходами к другим выходам/входам управляющего контроллера 19, громкоговоритель 22, соединенный через усилитель 23 с соответствующим выходом управляющего контроллера 19, формирователь 24 управляющих сигналов, включенный между управляющим выходом панели 21 управления и индикации и другим входом управляющего контроллера 19, другим выходом подключенного к оптическому излучателю 25, и блок 26 питания.
Для возможности организации переговоров руководителя работ с машинистом локомотива приближающего к месту работ подвижного состава по каналу поездной радиосвязи коллективный переносной сигнализатор включает приемопередатчик 27 и переговорно-вызывное устройство 28, подключенное к управляющему контроллеру 19, соответствующий вход/выход которого соединен с выходом/входом приемопередатчика 27.
При этом панель 21 управления и индикации включает элементы ручного включения КПС 9, элементы ручного включения передачи сигнала оповещения на КОПР 5, КОПМ 6 и ИНОР 8, элементы управления для задания показаний каждого РПСО 4 и световые индикаторы: для контроля показаний каждого РПСО 4, для индикации отсутствия связи с каждым РПСО 4, для индикации поступления контрольных сигналов от РСДОП 3 каждого ДОП 2, для индикации нарушения радиосвязи с конкретным РСДОП 3, для индикации «Норма/Отказ от каждого КОПР 5, КОПМ 6, для индикации нарушения радиосвязи с конкретными КОПР 5, КОПМ 6 и ИНОР 8 (на чертеже не показаны).
Входящие в состав КПС 9 устройства размещены в едином корпусе, устанавливаемом на высоте приблизительно 1,2 м над уровнем земли. Корпус КПС-Л 9 снабжен ручкой для переноски и опорами для установки на земляном полотне.
ДОП 2 представляет собой переносное устройство, устанавливаемое оперативно на время проведения работ на подошве рельса железнодорожного пути.
Каждый ДОП 2 соединен гибким экранированным кабелем с радиостанцией РСДОП 3, устанавливаемой вблизи железнодорожного полотна.
В качестве ДОП 2 используют датчики, которые осуществляют обнаружение железнодорожного подвижного состава бесконтактным способом (магнитным, ультразвуковым, оптическим или любым другим).
ДОП 2 настраивают для обнаружения подвижного состава, движущегося только в сторону места проведения работ.
Контрольный сигнал и сигнал оповещения, поступающий от РСДОП 3 каждого ДОП 2, содержит информацию о направлении движения приближающегося к месту проведения работ подвижного состава.
При этом ДОП 2 и РСДОП 4 устанавливают таким образом, чтобы исключить несанкционированное изменение настроечных параметров, доступ к которым обеспечивают с использованием уникального ключа, находящегося у руководителя работ.
Для организации безопасного оповещения ДОП 2 совместно с РСДОП3 устанавливают на расстоянии  от границ места проведения работ, рассчитанном по формуле: =Vmax/60 км, где Vmax (км/ч) - максимальная скорость движения поездов, разрешенная на данном участке железной дороги.
от границ места проведения работ, рассчитанном по формуле: =Vmax/60 км, где Vmax (км/ч) - максимальная скорость движения поездов, разрешенная на данном участке железной дороги.
При таком размещении ДОП2 оповещение работающих о приближении подвижного состава произойдет не менее чем за 60 с до подхода подвижного состава к границе места проведения работ.
При этом КПОР 5, КОПМ 6 и КПС 9 могут быть оборудованы системой автоматической регулировки звукового уровня в зависимости от уровня шума в зоне оповещения, обеспечивающей превышение уровня полезного сигнала над средним уровнем шума на 10 дБ, но не выше 120 дБ.
Звуковой излучатель (громкоговоритель) обеспечивает излучение звуковых сигналов с диаграммой направленности приблизительно 180° при допустимом снижении уровня в крайних точках диаграммы не более 3 дБ.
Сигнал оповещения имеет длительность приблизительно 2 с с периодом повторения 4 с. Продолжительность передачи оповещения составляет 20 с с повторением через 10 с не менее трех раз.
Контрольный сигнал, воспроизводимый КПОР 5, КОПМ 6 и КПС 9, представляет собой сигнал тональной частоты в диапазоне от 300 до 3500 Гц длительностью от 1 до 2 с с периодом повторения от 10 до 15 с. Воспроизведение контрольного сигнала осуществляется с уровнем не выше 120 дБ.
Во время передачи оповещения на КПОР 5, КОПМ 6 и КПС 9 излучается оптический сигнал оранжевого цвета длительностью свечения от 1 до 2 с с периодом повторения от 3 до 4 с.
Система работает следующим образом.
При включении КПС 9 в автоматическом режиме передает на РСДОП 3 сигналы, активизирующие работу каждого ДОП 2.
При отсутствии приближающегося подвижного состава ДОП 2, установленные с разных сторон места работ, формируют контрольные сигналы, которые поступают на вход РСДОП3 каждого ДОП 2 для передачи их по радиоканалам КПС9. Контрольные сигналы КПС 9 воспроизводит каждые 10-15 с.
Контрольные сигналы поступают на КПС9 от каждого РСДОПЗ в разных временных интервалах, подтверждая отсутствие подвижного состава в каждом направлении.
КПС 9 на основании информации об отсутствии подвижного состава с двух направлений воспроизводит общий тональный и оптический сигнал контроля.
При обнаружении одним из ДОП 2 приближающегося подвижного состава соответствующая РСДОП3 прекращает передачу контрольного сигнала и формирует сигнал оповещения, который передает на КПС 9. Сигнал оповещения воспроизводится громкоговорителем и соответствующим оптическим излучателем КПС 9.
Воспроизведение сигнала оповещения продолжается от момента обнаружения подвижного состава до его прохода датчиком ДОП 2 плюс дополнительно 7-10 с.
К работе разрешается приступить только после проследования подвижным составом места работ.
При этом в начале воспроизведения сигнала оповещения КПС 9 формирует речевой сигнал, воспроизводимый громкоговорителем, содержащий сообщение о направлении, по которому приближается поезд. Речевое сообщение о направлении движения поезда воспроизводится также на КПОР 5 и КПОМ 6.
Если во время воспроизведения оповещения о приближении подвижного состава с одного из направлений на двухпутном участке будет обнаружен подвижной состав, приближающийся с другого направления, КПС 9 воспроизводит через громкоговоритель речевое сообщение о направлении движения обнаруженного подвижного состава.
Направление движения приближающихся подвижных составов индицируется на панели управления и индикации КПС9 соответствующими оптическими излучателями.
При нарушении связи с одним из ДОП 2 (РСДОП3) в результате прекращения поступления контрольных сигналов КПС 9 переходит в режим оповещения и включает аварийную сигнализацию. При этом на его панели управления и индикации появляется информация об отказе конкретного ДОП2 и соответствующего ему РСДОПЗ.
Сигналы контроля и оповещения КПС 9 в автоматическом режиме транслирует по радиоканалу на КОПР 5, ИНОР 8 и КОПМ 6, воспроизводящие звуковые и оптические сигналы контроля и оповещения в пределах участка работ.
КОПР 5 и КОПМ 6 оборудованы средствами мониторинга, анализирующими воспроизводимые сигналы с помощью специальных микрофонов и формирующими при нормальном функционировании или при отклонении от нормы квитирующие сигналы, которые передают эту информацию на КПС 9.
Отказ любого КОПР 5 или КОПМ 6 индицируется оптическим сигналом на панели 21 управления и индикации КПС 9 и сопровождается звуковым сигналом тревоги.
Ограждение места работ, опасного для движения поездов и требующего остановки или снижения скорости поезда, обеспечивают с помощью управляемых и контролируемых по радиоканалу РПСО 4.
РПСО 4 устанавливают по обе стороны от границ места проведения работ на заданном расстоянии от переносного красного сигнала, находящегося на расстоянии 50 м от границы места проведения работ (Инструкция по обеспечению безопасности движения поездов при производстве путевых работ. Утверждена распоряжением ОАО «РЖД» от 29.12.2012 г. №2790р).
Каждое РПСО 4 воспроизводит разрешающее или запрещающее показания по управляющим командам, переданным от КПС 9.
При наличии препятствий движения на месте проведения работ руководитель с помощью элементов управления на панели 21 управления и индикации КПС 9 задает соответствующий управляющий сигнал и передает его по радиоканалу на РПСО 4 для формирования и включения запрещающего показания, требующего остановки поезда у границы места проведения работ. При отсутствия препятствий движения на месте проведения работ КПС 9 передает по радиоканалу управляющий сигнал РПСО 4 для формирования и включения разрешающего показания, разрешающего движение поезда с установленной скоростью.
Радиостанция 17 РПСО 4, получив управляющий сигнал от КПС 9, передает его в контроллер 14, который осуществляет формирование соответствующего показания РПСО 4. Для формирования запрещающего показания контроллер 14 подает импульсное питающее напряжение на излучатель красного цвета ИК12, а при формировании разрешающего показания - на излучатель желтого цвета ИЖ 13. В том и в другом случае излучатели ИК 12 и ИЖ 13 работают в мигающем режиме.
При этом ФП15 контролирует работу излучателя ИК12, а ФП16 - излучателя ИЖ 13. В режиме излучения ИК 12 или ИЖ 13 соответственно на выходе ФП15 или ФП16 формируется сигнал, который поступает на соответствующий вход контроллера 14. Контроллер 14 передает на вход радиостанции 17 соответствующий квитирующий сигнал в качестве контрольных сигналов для передачи по радиоканалу на КПС 9.
Радиостанция 20 КПС 9 в автоматическом режиме воспроизводит квитирующий сигнал от каждого РПСО 4 и передает его управляющему контроллеру 19, который сравнивает его с заданными управляющим сигналом и при совпадении формирует оптический сигнал, подтверждающий заданный сигнал ограждения конкретного РПСО 4, а при несовпадении - соответствующий тональный и оптический аварийные сигналы.
При подтверждении запрещающего показания каждого РПСО 4 на панели 21 КПС 9 индикаторы каждого направления движения излучают красный мигающий огонь, а при подтверждении разрешающего показания - индикаторы каждого направления движения излучают желтый мигающий огонь.
При нарушении связи с РПСО 4 или при поступлении квитирующего сигнала, не соответствующего переданному управляющему сигналу, сигнальный индикатор данного РПСО4 на КПС 9 индикатор начинает светиться синим цветом, и КПС 9 при этом воспроизводит звуковой сигнал тревоги.
РПСО 4 передает квитирующие сигналы на КПС 9 только при вертикальном положении, при направлении излучения в сторону приближающегося поезда и при размещении РПСО 4 в определенном месте.
При несанкционированном перемещении, изменении вертикального положения или направления излучения передача квитирующих сигналов от РПСО 4 прекращается.
Возобновление передачи квитирующих сигналов после несанкционированного воздействия на РПСО 4 осуществляется с помощью специального ключа, находящегося у руководителя работ.
Таким образом, предложенное решение обеспечивает повышение безопасности движения и безопасности работающих на железнодорожных путях в результате уменьшения влияния на их обеспечение человеческого фактора, что позволяет также повысить производительность труда при выполнении работ по ремонту и текущему содержанию объектов железнодорожной инфраструктуры путем исключения из состава работающих сигналистов.
Изобретение относится к области железнодорожной автоматики для ограждения работ и оповещения работающих. В способе задействуют установленные на подошве рельса по обе стороны от места работ датчики обнаружения подвижного состава (ДОП), снабженные радиостанцией, установленные по обе стороны места работ сигнальные радиоуправляемые переносные устройства ограждения (РПСО), коллективный переносный сигнализатор (КПС) на месте работ. ДОП при отсутствии подвижного состава формируют контрольные сигналы, а при обнаружении подвижного состава - сигналы оповещения и передают их КПС, который при отсутствии контрольных сигналов включает аварийную сигнализацию и информирует об отказе конкретного ДОП. Причем при наличии препятствий движения на месте работ и при их отсутствии посредством КПС в ручном режиме задают соответствующий управляющий сигнал, который передают РПСО для формирования запрещающего или разрешающего показания, РПСО контролируют сигнальные показания с последующей передачей результатов на КПС, который в автоматическом режиме сравнивает их с заданным управляющим сигналом и при совпадении формирует оптический сигнал, подтверждающий показания каждого РПСО, а при несовпадении включает аварийную сигнализацию в виде соответствующего оптического и тонального сигналов тревоги. Достигается повышение безопасности. 7 з. п. ф-лы, 2 ил.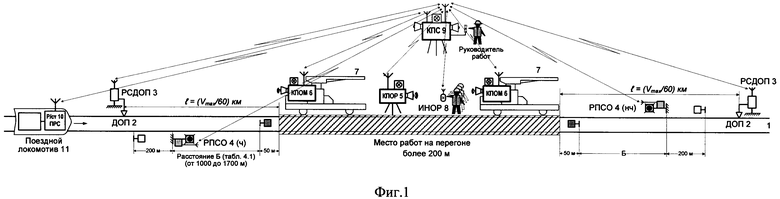
1. Способ оповещения работающих на железнодорожных путях, заключающийся в том, что перед началом работ на подошве рельса железнодорожного пути по обе стороны от границ места работ на заданном расстоянии устанавливают датчики обнаружения подвижного состава, каждый из которых снабжен радиостанцией, а также на заданном расстоянии по обе стороны от границ места работ у ремонтируемого пути устанавливают переносные устройства ограждения, выполненные в виде сигнальных радиоуправляемых устройств ограждения, а на месте работ - коллективный переносный сигнализатор, обеспечивающий взаимодействие по радиоканалу с радиостанциями датчиков обнаружения подвижного состав и сигнальными радиоуправляемыми устройствами ограждения, коллективный переносный сигнализатор в автоматическом режиме передает сигналы, активизирующие работу датчиков обнаружения подвижного состава, которые при отсутствии подвижного состава формируют контрольные сигналы, а при обнаружении подвижного состава - сигналы оповещения и передают их коллективному переносному сигнализатору, который в автоматическом режиме осуществляет их воспроизведение в виде соответствующих тональных и оптических сигналов контроля и сигналов оповещения, а при отсутствии контрольных сигналов включает аварийную сигнализацию и информирует об отказе конкретного датчика обнаружения подвижного состава, причем при наличии препятствий движения на месте проведения работ, а также при их отсутствии посредством коллективного переносного сигнализатора в ручном режиме задают соответствующий управляющий сигнал, который передают по радиоканалу сигнальным радиоуправляемым устройствам ограждения для формирования запрещающего показания или разрешающего показания, при этом сигнальные радиоуправляемые устройства ограждения выполнены с возможностью контроля сигнальных показаний с последующей передачей результатов контроля по радиоканалу на коллективный переносный сигнализатор, который в автоматическом режиме сравнивает их с заданным управляющим сигналом и при совпадении формирует оптический сигнал, подтверждающий показания каждого сигнального радиоуправляемого устройства ограждения, а при несовпадении включает аварийную сигнализацию в виде соответствующего оптического и тонального сигналов тревоги.
2. Способ по п. 1, отличающийся тем, что коллективный переносный сигнализатор выполнен с возможностью организации переговоров руководителя работ с машинистом локомотива приближающегося к месту проведения работ подвижного состава по каналу поездной радиосвязи.
3. Способ по п. 2, отличающийся тем, что руководитель работ задает режим функционирования сигнальных радиоуправляемых устройств ограждения ручным способом посредством коллективного переносного сигнализатора или дистанционно с помощью пульта дистанционного управления коллективным переносным сигнализатором.
4. Способ по любому из пп. 1, 2, 3, отличающийся тем, что на месте проведения работ устанавливают коллективные переносные оповещатели работающих, по меньшей мере, один из которых выполнен с возможностью установки на путевой машине, работающих снабжают индивидуальными носимыми оповещателями, при этом коллективный переносный сигнализатор в автоматическом режиме по радиоканалу транслирует сигналы контроля и оповещения на коллективные переносные оповещатели работающих и индивидуальные носимые оповещатели, которые воспроизводят их в виде соответствующих тональных и оптических сигналов
5. Способ по п. 4, отличающийся тем, что коллективный переносный сигнализатор взаимодействует с сигнальными радиоуправляемыми устройствами ограждения, коллективными переносными оповещателями работающих, индивидуальными носимыми оповещателями работающих и радиостанциями датчиков обнаружения подвижного состава в одном частотном радиоканале в выделенном для каждого из них временном интервале.
6. Способ по любому из пп. 1, 2, 3, 5, отличающийся тем, что сигнальное радиоуправляемое устройство ограждения выполнено в виде сигнализатора, включающего излучатели красного и желтого цвета, контроллер, фотоприемники для анализа цвета излучения излучателей, радиостанцию и блок питания в виде аккумуляторной батареи, при этом выходы контроллера подключены к входам излучателей, входы - к выходам фотоприемников, а вход/выход - к выходу/входу радиостанции, причем оптический сигнализатор закреплен на штанге, вертикально установленной на пластине с отверстиями для размещения замков запирания, и снабжен датчиком наклона.
7. Способ по любому из пп. 1, 2, 3, 5, отличающийся тем, что коллективный переносный сигнализатор содержит радиостанцию, управляющий контроллер, вход/выход которого подключен к выходу/входу радиостанции, панель индикации и управления, подключенную входами/выходами к другим выходам/входам управляющего контроллера, громкоговоритель, соединенный через усилитель с соответствующим выходом управляющего контроллера, формирователь управляющих сигналов, включенный между управляющим выходом панели управления и индикации и другим входом управляющего контроллера, другим выходом подключенного к оптическому излучателю, и блок питания.
8. Способ по п. 4, отличающийся тем, что коллективный переносной сигнализатор содержит радиостанцию, управляющий контроллер, вход/выход которого подключен к выходу/входу радиостанции, панель индикации и управления, подключенную входами/выходами к другим выходам/входам управляющего контроллера, громкоговоритель, соединенный через усилитель с соответствующим выходом управляющего контроллера, формирователь управляющих сигналов, включенный между управляющим выходом панели управления и индикации и другим входом управляющего контроллера, другим выходом подключенного к оптическому излучателю, и блок питания.
| СИСТЕМА ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ О ПРИБЛИЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2015 |
|
RU2583011C1 |
| СПОСОБ ОПОВЕЩЕНИЯ РАБОТАЮЩИХ О ПРИБЛИЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА ПРИ ВЫПОЛНЕНИИ РАБОТ НА ЖЕЛЕЗНОДОРОЖНОМ ПУТИ | 2015 |
|
RU2606755C1 |
| Блиндер И | |||
| Д | |||
| и др | |||
| "Система оповещения работающих на перегоне"; журнал "АВТОМАТИКА СВЯЗЬ ИНФОРМАТИКА-АСИ" ОАО "РЖД", Москва, март 2015, N3 | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |

