Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано для оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ.
Известен способ оповещения о приближении железнодорожного подвижного состава, заключающийся в том, что датчики обнаружения подвижного состава, расположенные на железнодорожных путях по обе стороны от места проведения работ, с каждой стороны по два датчика на одном пути на расстоянии друг от друга, передают на соответствующий системный блок контрольные сигналы и сигналы оповещения при обнаружении датчиками подвижного состава, системные блоки передают полученные сигналы по радиоканалу на центральный блок управления, с помощью которого сигналы передают по радиоканалу на коллективные и индивидуальные оповещатели, при этом передачу сигнала оповещения от системного блока на центральный блок управления осуществляют только при передаче на системный блок сигнала оповещения от обоих датчиков, установленных на одном пути, и при последовательности передачи сигналов оповещения от этих датчиков, соответствующих направлению в сторону места проведения работ, а при поступлении на системный блок сигналов оповещения только от одного из двух датчиков и при отсутствии сигналов оповещения от второго датчика не осуществляют передачу сигналов оповещения от системного блока на центральный блок управления, при этом центральный блок управления регистрирует отказ соответствующего направления системы оповещения (RU 2606755 С1, 10.01.2015 г.).
В известном способе контроль функционирования датчиков обнаружения подвижного состава и системных блоков в автоматическом режиме осуществляет центральный блок управления под контролем сигналиста, находящегося на месте проведения работ, который в случае нарушения их функционирования сообщает об этом сигналисту ограждения и при получении соответствующего сообщения от него ручным способом включает сигнал оповещения и передает его по радиоканалу на коллективные и индивидуальные оповещатели.
Недостатком известного способа является то, что при наличии автоматизации процесса оповещения работающих о приближении подвижного состава для его реализации требуются тем не менее сигналисты, обеспечивающие ограждение границ участка работ.
Известен способ оповещения работающих на железнодорожных путях, заключающийся в том, что перед началом работ на подошве рельса железнодорожного пути по обе стороны от границ места работ на заданном расстоянии устанавливают датчики обнаружения подвижного состава, каждый из которых снабжен радиостанцией, а также на заданном расстоянии по обе стороны от границ места работ у ремонтируемого пути устанавливают переносные устройства ограждения, выполненные в виде сигнальных радиоуправляемых устройств ограждения, а на месте работ - коллективный переносный сигнализатор, обеспечивающий взаимодействие по радиоканалу с радиостанциями датчиков обнаружения подвижного состав и сигнальными радиоуправляемыми устройствами ограждения, коллективный переносный сигнализатор в автоматическом режиме передает сигналы, активизирующие работу датчиков обнаружения подвижного состава, которые при отсутствии подвижного состава формируют контрольные сигналы, а при обнаружении подвижного состава - сигналы оповещения и передают их коллективному переносному сигнализатору, который в автоматическом режиме осуществляет их воспроизведение в виде соответствующих тональных и оптических сигналов контроля и сигналов оповещения, а при отсутствии контрольных сигналов включает аварийную сигнализацию и информирует об отказе конкретного датчика обнаружения подвижного состава, причем при наличии препятствий движения на месте проведения работ, а также при их отсутствии посредством коллективного переносного сигнализатора в ручном режиме задают соответствующий управляющий сигнал, который передают по радиоканалу сигнальным радиоуправляемым устройствам ограждения для формирования запрещающего показания или разрешающего показания, при этом сигнальные радиоуправляемые устройства ограждения выполнены с возможностью контроля сигнальных показаний с последующей передачей результатов контроля по радиоканалу на коллективный переносный сигнализатор, который в автоматическом режиме сравнивает их с заданным управляющим сигналом и при совпадении формирует оптический сигнал, подтверждающий показания каждого сигнального радиоуправляемого устройства ограждения, а при несовпадении включает аварийную сигнализацию в виде соответствующего оптического и тонального сигналов тревоги (RU 2655566 C1, B61L 23/06, 28.05.2018).
Известный способ обеспечивает повышение безопасности движения и безопасности работающих на железнодорожных путях в результате уменьшения влияния на их обеспечение человеческого фактора.
При этом для обеспечения безопасности работающих используют датчики обнаружения подвижного состава, которые устанавливают перед началом работ на подошве рельса железнодорожного пути по обе стороны от границ места работ на заданном расстоянии, а также переносные устройства ограждения, которые также устанавливают перед началом работ на заданном расстоянии по обе стороны от границ места работ у ремонтируемого пути, что требует дополнительных людских ресурсов.
Технический результат предлагаемого изобретения заключается в упрощении способа оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ за счет использования централизованной системы автоблокировки, что позволяет отказаться от датчиков обнаружения подвижного состава и переносных устройств ограждения.
Технический результат достигается тем, что способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ заключается в том, что на месте работ устанавливают коллективный переносный сигнализатор с автономным источником питания, через ближайший пункт доступа на перегоне к межстанционной линии связи централизованной системы автоблокировки подключают переносную радиостанцию с автономным источником питания, причем коллективный переносный сигнализатор выполнен с возможностью взаимодействия по радиоканалам с системой спутниковой навигации и с переносной радиостанцией, коллективный переносный сигнализатор по системе спутниковой навигации получает информацию о своем местоположении, а по данным централизованной системы автоблокировки – информацию о занятии подвижным составом блок-участков на перегоне, сопоставляет в режиме реального времени полученную информацию и при приближении на заданное расстояние подвижного состава к своему местоположению формирует и воспроизводит сигналы оповещения в виде соответствующих звуковых и оптических сигналов, при наличии на месте выполнения работ препятствия для движения подвижного состава коллективный переносной сигнализатор передает по команде руководителя работ через переносную радиостанцию по межстанционной линии связи централизованной системы автоблокировки в аппаратно-программное устройство рабочего места дежурного по станции сообщение о наличии препятствия на месте работ, при получении которого дежурный по станции ограждает место работ путем подачи в аппаратно-программный комплекс централизованной системы автоблокировки команды для остановки подвижного состава до его подхода к месту работ посредством автоматической локомотивной сигнализации.
При этом при отсутствии приближающегося подвижного состава коллективный переносный сигнализатор формирует и воспроизводит контрольные звуковые и оптические сигналы.
Для повышения надежности коллективный переносный сигнализатор сопоставляет воспроизводимые им звуковые сигналы с сигналами, инициирующими воспроизведение, и формирует сигналы подтверждения или сигналы аварии в случае их соответствия или несоответствия, которые передает через переносную радиостанцию по межстанционной линии связи централизованной системы автоблокировки в аппаратно-программное устройство автоматизированного рабочего места дежурного по станции для его информирования, при этом сигналы аварии воспроизводит в виде соответствующих звуковых сигналов.
Руководитель работ может быть снабжен переносным пультом управления и контроля, взаимодействующим с коллективным переносным сигнализатором по радиоканалу для его контроля и управления.
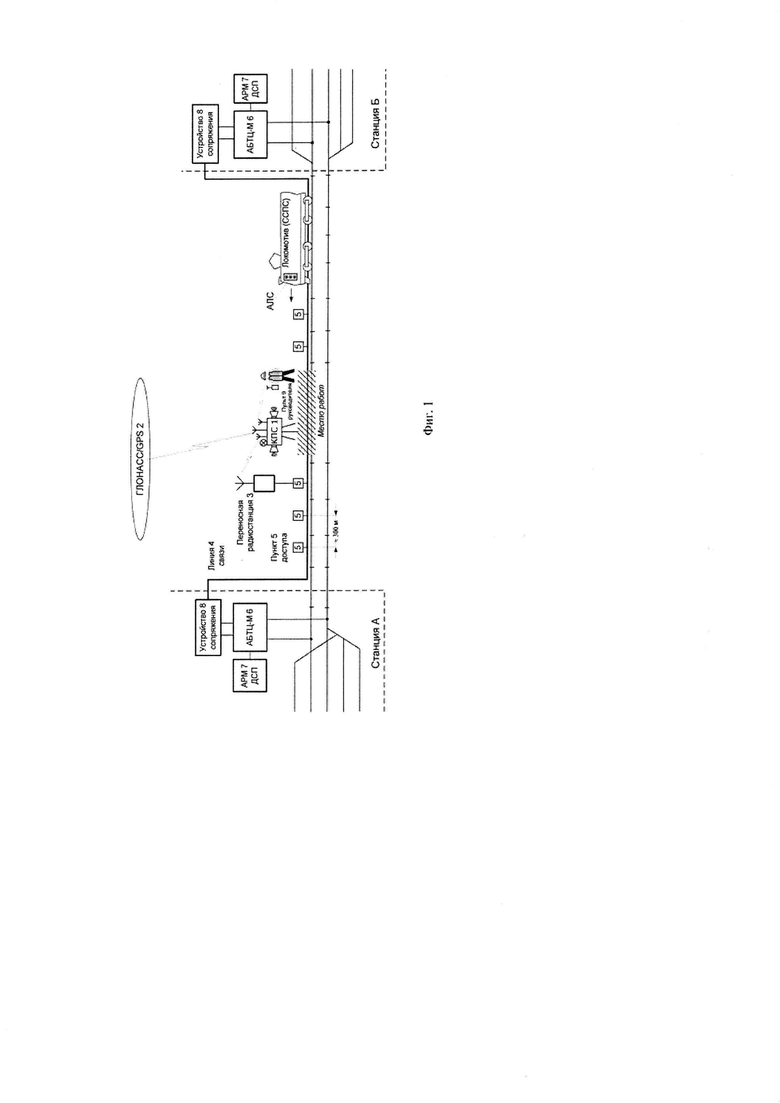
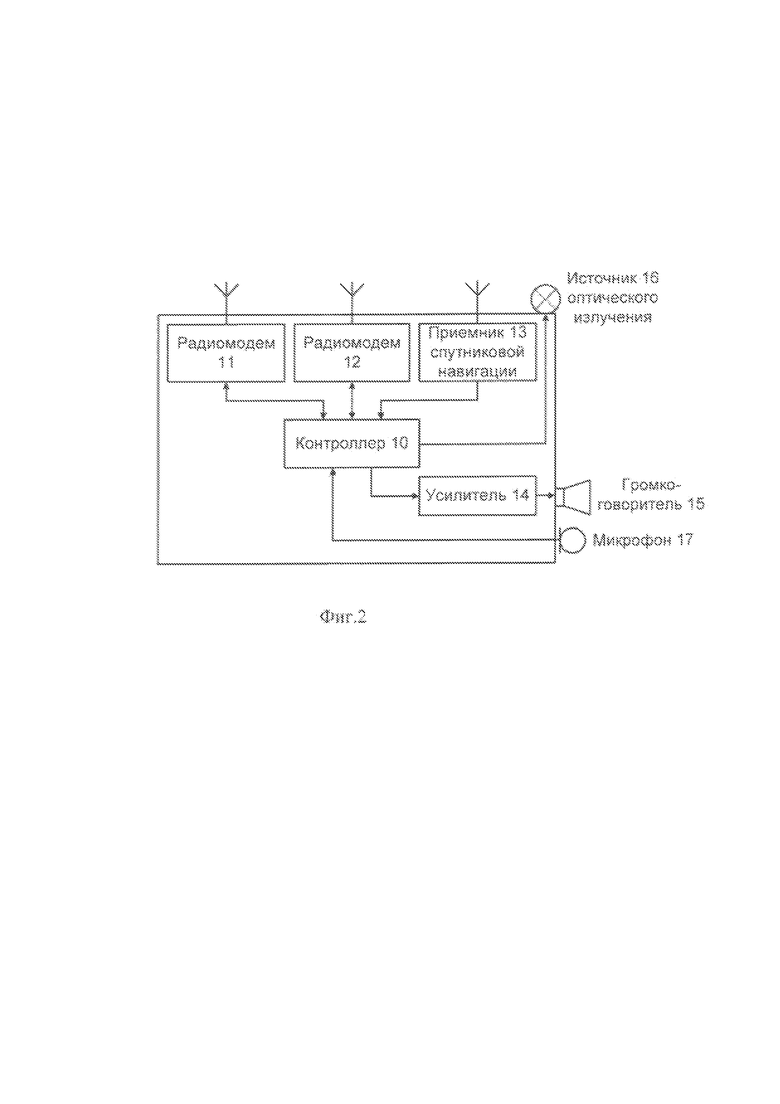
Сущность предлагаемого изобретения поясняется чертежами на фиг.1 и фиг.2. На фиг.1 представлена структурная схемы оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ, реализующая предлагаемый способ, на фиг. 2 – структурная схема коллективного переносного сигнализатора.
Система оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ содержит установленный на перегоне на месте работ коллективный переносной сигнализатор 1 (КПС 1) с автономным источником питания, выполненный с возможностью взаимодействия по радиоканалам с системой 2 спутниковой навигации и с переносной радиостанцией 3, подключенной к межстанционной линии 4 связи микропроцессорной централизованной системы автоблокировки через ближайший к месту работ пункту 5 доступа.
При этом на каждой станции А и Б аппаратно-программный полукомплект 6 микропроцессорной централизованной системы автоблокировки, например, АБТЦ-М 6, подключен к аппаратно-программному устройству автоматизированного рабочего места 7 дежурного по станции (АРМ 7 ДНЦ), а к через устройство8 сопряжения - к межстанционной линии 4 связи.
Переносная радиостанция 2 снабжена автономным источником питания (на чертеже не показано).
Руководитель работ снабжен переносным пультом 9 управления и контроля, выполненным с возможностью взаимодействия с КПС 1 по радиоканалу.
КПС 1 содержит контроллер 10, радиомодемы 11 и 12 для взаимодействия по радиоканалу соответственно с переносной радиостанцией 2 и переносным пультом 9 управления и контроля, приемник 13 спутниковой навигации, взаимодействующий по радиоканалу с системой 2 спутниковой навигации, последовательно соединенные усилитель 14 и громкоговоритель 15, источник 16 оптического излучения, установленный вблизи громкоговорителя 15 контрольный микрофон 17, выходом подключенный к соответствующему входу контроллера 10, другие входы которого соединены с выходами приемника 13 спутниковой навигации и кнопками управления (на чертеже не показана), выходы - с входами усилителя 14 и источника 16 оптического излучения, а входы/выходы - с выходами/входами радиомодемов 11 и 12, а также автономный источник питания (на чертеже не показан).
Контроллер 10, радиомодемы 11 и 12, приемник 13 спутниковой навигации, усилитель 14 и автономный источник питания установлены в едином корпусе, на внешней стороне которого размещены, громкоговоритель 15, источник 16 оптического излучения, микрофон 17 и кнопки управления.
Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ реализуется следующим образом.
При включении КПС 1 приемник 13 спутниковой навигации по системе 2 спутниковой навигации в автоматическом режиме определяет координаты местонахождения КПС 1 , информацию о которых передает в контроллер 10.
Информацию о занятии подвижным составом блок-участков на перегоне от аппаратно-программного полукомплекта 6 микропроцессорной централизованной системы автоблокировки через устройство 8 сопряжения по межстанционной линии 4 связи поступает на вход переносной радиостанции 2, которая по радиоканалу через радиомодем 11 передает её в контроллер 10 КПС 1.
Контроллер 10 сопоставляет в режиме реального времени информацию о местоположения КПС 1 и информацию о занятии подвижным составом блок-участков на перегоне. При приближении на заданное расстояние подвижного состава к местоположению КПС 1 контроллер 10 формирует сигналы оповещения, а при отсутствии подвижного состава – контрольные сигналы. Сигналы оповещения, также как и контрольные сигналы, контроллер 10 для соответствующего звукового воспроизведения передает через усилитель 14 на вход громкоговорителя 17, а для соответствующего оптического воспроизведения – на вход источника 16 оптического излучения.
При наличии на месте выполнения работ препятствия для движения подвижного состава руководитель работ с помощью соответствующей кнопки управления непосредственно на КПС 1 или с пульта 9 управления и контроля по радиоканалу через радиомодем 12 передает соответствующую команду контроллеру 10, который формирует сообщение о наличии препятствия на месте работ и передает его через переносную радиостанцию 2 по межстанционной линии 4 связи, устройство 8 сопряжения и аппаратно-программный полукомплект 6 микропроцессорной централизованной системы автоблокировки в АРМ 7ДНЦ.
В этом случае дежурный по станции ограждает место работ путем подачи в аппаратно-программный полукомплект 6 микропроцессорной централизованной системы автоблокировки команды для остановки подвижного состава до его подхода к месту работ посредством автоматической локомотивной сигнализации.
Для контроля КПС 1 контрольный микрофон 17 регистрирует воспроизводимые громкоговорителем 15 сигналы и передает их контроллеру 10. Контроллер 10 преобразует аналоговые сигналы в цифровые и сопоставляет их с сигналами, инициирующими воспроизведение. В случае их подтверждения или несоответствия контроллер 10 формирует сигналы подтверждения или сигналы аварии, которые передает через радиомодем 11 по радиоканалу в переносную радиостанцию 2, которая по межстанционной линии 4 связи централизованной системы автоблокировки через блок 8 сопряжения и АБТЦМ 6 направляет их в АРМ 7 ДНЦ для оперативного информирования о состоянии КПС 1. Одновременно КПС 1 для соответствующего звукового воспроизведения сигналы аварии направляет через усилитель 14 на вход громкоговорителя 15, а для соответствующего оптического воспроизведения – на вход источника 16 оптического излучения.
Таким образом, использование централизованной системы автоблокировки позволяет обеспечить безопасность работающих и безопасность движения поездов, а также упростить способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического оповещения работающих в железнодорожном тоннеле о приближении железнодорожного подвижного состава с ограждением места работ | 2021 |
|
RU2763069C1 |
| Способ оповещения работающих на перегоне о приближении железнодорожного подвижного состава с ограждением места работ | 2022 |
|
RU2780241C1 |
| Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ | 2019 |
|
RU2702379C1 |
| Система ограждения места работ и оповещения работающих на железнодорожном пути о приближении подвижного состава | 2020 |
|
RU2746627C1 |
| Способ автоматизированного оповещения работающих на железнодорожном пути перегона о приближении подвижного состава с ограждением места работ | 2023 |
|
RU2799949C1 |
| СИСТЕМА И СПОСОБ ДЛЯ АВТОМАТИЧЕСКОГО ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ | 2021 |
|
RU2773550C1 |
| Система оповещения о приближении подвижного состава, ограждения места работ и технологической радиосвязи путевой машины | 2020 |
|
RU2749681C1 |
| Система оповещения работающих на перегоне о приближении подвижного состава с ограждением места проведения работ | 2019 |
|
RU2725327C1 |
| ЦЕНТРАЛИЗОВАННАЯ СИСТЕМА ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ ПЕРЕГОНА | 2012 |
|
RU2511750C1 |
| Способ ограждения места проведения работ и оповещения работающих на железнодорожных путях | 2017 |
|
RU2655566C1 |
Изобретение относится к области железнодорожной автоматики для оповещения работающих на перегоне о приближении подвижного состава и ограждения места работ. В способе на месте работ устанавливают коллективный сигнализатор, через ближайший пункт доступа на перегоне к межстанционной линии связи автоблокировки подключают переносную радиостанцию, коллективный сигнализатор взаимодействует с системой спутниковой навигации и переносной радиостанцией, получает информацию о своем местоположении и о занятии подвижным составом блок-участков на перегоне, сопоставляет в режиме реального времени полученную информацию, при приближении подвижного состава к своему местоположению формирует и воспроизводит сигналы оповещения. При наличии препятствия для подвижного состава коллективный сигнализатор передает по команде руководителя работ через переносную радиостанцию по межстанционной линии связи в аппаратно-программное устройство АРМ дежурного по станции сообщение о наличии препятствия на месте работ, место ограждается путем подачи в аппаратно-программный комплекс централизованной системы автоблокировки команды для остановки состава до его подхода к месту работ посредством АЛС. Достигается упрощение оповещения работающих с ограждением места работ. 4 з.п. ф-лы, 2 ил.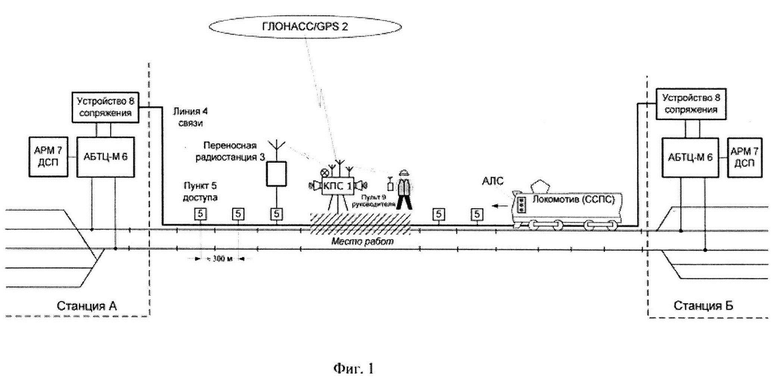
1. Способ оповещения работающих на перегоне о приближении подвижного состава с ограждением места работ, заключающийся в том, что на месте работ устанавливают коллективный переносный сигнализатор с автономным источником питания, отличающийся тем, что через ближайший пункт доступа на перегоне к межстанционной линии связи централизованной системы автоблокировки подключают переносную радиостанцию с автономным источником питания, причем коллективный переносный сигнализатор выполнен с возможностью взаимодействия по радиоканалам с системой спутниковой навигации и с переносной радиостанцией, коллективный переносный сигнализатор по системе спутниковой навигации получает информацию о своем местоположении, а по данным централизованной системы автоблокировки – информацию о занятии подвижным составом блок-участков на перегоне, сопоставляет в режиме реального времени полученную информацию и при приближении на заданное расстояние подвижного состава к своему местоположению формирует и воспроизводит сигналы оповещения в виде соответствующих звуковых и оптических сигналов, при наличии на месте выполнения работ препятствия для движения подвижного состава коллективный переносной сигнализатор передает по команде руководителя работ через переносную радиостанцию по межстанционной линии связи централизованной системы автоблокировки в аппаратно-программное устройство рабочего места дежурного по станции сообщение о наличии препятствия на месте работ, при получении которого дежурный по станции ограждает место работ путем подачи в аппаратно-программный комплекс централизованной системы автоблокировки команды для остановки подвижного состава до его подхода к месту работ посредством автоматической локомотивной сигнализации.
2. Способ по п. 1, отличающийся тем, что при отсутствии приближающегося подвижного состава коллективный переносный сигнализатор формирует и воспроизводит контрольные звуковые и оптические сигналы.
3. Способ по любому из пп. 1, 2, отличающийся тем, что коллективный переносный сигнализатор сопоставляет воспроизводимые звуковые сигналы с сигналами, инициирующими воспроизведение, и формирует сигналы подтверждения или сигналы аварии в случае их соответствия или несоответствия, которые передает через переносную радиостанцию по межстанционной линии связи централизованной системы автоблокировки в аппаратно-программное устройство автоматизированного рабочего места дежурного по станции для его информирования, при этом сигналы аварии воспроизводит в виде соответствующих звуковых сигналов.
4. Способ по любому из пп. 1, 2, отличающийся тем, что руководитель работ снабжен переносным пультом управления и контроля, взаимодействующим с коллективным переносным сигнализатором по радиоканалу.
5. Способ по п. 3, отличающийся тем, что руководитель работ снабжен переносным пультом управления и контроля, взаимодействующим с коллективным переносным сигнализатором по радиоканалу.
| Способ гидрометаллургической переработки окисленных никелевых руд | 1943 |
|
SU73299A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| US 20170282944 A1, 05.10.2017 | |||
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| JP 2006224737 A, 31.08.2006 | |||
| СИСТЕМА ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ О ПРИБЛИЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2015 |
|
RU2583011C1 |
| СИСТЕМА КОНТРОЛЯ И ОПОВЕЩЕНИЯ О ПРИБЛИЖЕНИИ ПОДВИЖНОГО СОСТАВА | 2011 |
|
RU2467902C1 |
| Устройство оповещения о приближениипОЕздА | 1979 |
|
SU844437A1 |

