Изобретение относится к области железнодорожной автоматики, телемеханики и связи и может быть использовано для ограждения места работ и автоматизированного оповещения работающих на железнодорожных путях о приближении железнодорожного подвижного состава без использования сигналистов.
Известен способ оповещения о приближении железнодорожного подвижного состава, заключающийся в том, что от датчиков обнаружения подвижного состава, расположенных на одном или двух железнодорожных путях по обе стороны от места проведения работ, с каждой стороны по два датчика на одном пути на расстоянии друг от друга, передают на соответствующий системный блок контрольные сигналы и, при обнаружении датчиками подвижного состава, сигналы оповещения передают полученные сигналы по радиоканалу на центральный блок управления, с помощью которого сигналы передают по радиоканалу на коллективные и индивидуальные оповещатели, причем передачу сигнала оповещения от системного блока на центральный блок управления осуществляют только при передаче на системный блок сигнала оповещения от обоих датчиков, установленных на одном пути, и при последовательности передачи сигналов оповещения от этих датчиков, соответствующих направлению в сторону места проведения работ, а при поступлении на системный блок сигналов оповещения только от одного из двух датчиков и при отсутствии сигналов оповещения от второго датчика не осуществляют передачу сигналов оповещения от системного блока на центральный блок управления, при этом на ЦБУ регистрируют отказ соответствующего направления системы оповещения (RU 2606755 С1, 10.01.2017).
Недостатком известного способа является то, что при наличии автоматизации процесса оповещения работающих о приближении подвижного состава отсутствуют средства для ограждения границ участка работ при возникновении на месте работ препятствий для движения подвижного состава.
Наиболее близким к предложенной является способ ограждения места проведения работ и оповещения работающих на железнодорожных путях, заключающийся в том, что перед началом работ на подошве рельса железнодорожного пути по обе стороны от границ места работ на заданном расстоянии устанавливают датчики обнаружения подвижного состава, каждый из которых снабжен радиостанцией, а также на заданном расстоянии по обе стороны от границ места работ у ремонтируемого пути устанавливают радиоуправляемые переносные сигнальные устройства ограждения (РПСО), а на месте работ - коллективный переносный сигнализатор (КПС), обеспечивающий взаимодействие по радиоканалу с радиостанциями датчиков обнаружения подвижного состав и РПСО, КПС в автоматическом режиме передает сигналы, активизирующие работу датчиков обнаружения подвижного состава, которые при отсутствии подвижного состава формируют контрольные сигналы, а при обнаружении подвижного состава - сигналы оповещения и передают их КПС, который в автоматическом режиме осуществляет их воспроизведение в виде соответствующих тональных и оптических сигналов контроля и сигналов оповещения, а при отсутствии контрольных сигналов включает аварийную сигнализацию и информирует об отказе конкретного датчика обнаружения подвижного состава, причем при наличии препятствий движения на месте проведения работ, а также при их отсутствии посредством КПС в ручном режиме задают соответствующий управляющий сигнал, который передают по радиоканалу на РСПО для формирования запрещающего показания или разрешающего показания, при этом РПСО выполнены с возможностью контроля сигнальных показаний с последующей передачей результатов контроля по радиоканалу на КПС, который в автоматическом режиме сравнивает их с заданным управляющим сигналом и при совпадении формирует оптический сигнал, подтверждающий показания каждого РПСО, а при несовпадении включает аварийную сигнализацию в виде соответствующего оптического и тонального сигналов тревоги; КПС выполнен с возможностью организации переговоров руководителя работ с машинистом локомотива приближающегося к месту проведения работ подвижного состава по каналу поездной радиосвязи; руководитель работ задает режим функционирования сигнальных радиоуправляемых устройств ограждения ручным способом посредством КПС или дистанционно с помощью пульта дистанционного управления КПС (RU 2655566 C1, 26.06.2017). Данный способ принят за прототип.
Известный способ имеет следующие недостатки. В соответствии с формулой L=Vmax/60, где Vmax - максимально разрешенная скорость поезда на участке ограждения (140 км/ч) датчики должны устанавливать на расстоянии 2,3 км от КПС, что в условиях криволинейных участков или других препятствий для прохождения радиосигнала труднодостижимо для их гарантированного функционирования. КПС отдельно связываются по радиоканалу с датчиками и отдельно с РПСО. Если связь с РПСО не вызывает сомнения, так как оно стоит ближе к КПС (1000-1700 м), то радиосвязь с датчиком (2000-2300 м) при определенных условиях может быть проблематичной.
Кроме того, недостатком известного способа является сложность установки датчиков обнаружения подвижного состава на подошве рельсов и устройств ограждения, требующих участия, по меньшей мере, двух человек и продолжительность работы не менее 10 минут, особенно трудоемкой в зимних условиях.
Технической проблемой, решаемой изобретением, является повышение надежности работы системы, обеспечение возможности увеличения расстояния установки датчика от места работ, что позволяет применять систему на больших участках железнодорожной инфраструктуры, а также упрощение системы, уменьшение материальных и эксплуатационных затрат при ее применении,
Техническим результатом, достигаемым изобретением и позволяющим решить указанную проблему, является повышение надёжности передачи сигналов датчиков обнаружения подвижного состава, в том числе при большом расстоянии их от места работ и на изогнутых участках пути.
Технический результат достигается тем, что способ ограждения места проведения работ и оповещения работающих на железнодорожных путях, заключается в том, что перед началом работ устанавливают по обе стороны от границ места проведения работ датчики обнаружения подвижного состава, устанавливают ближе к границам места проведения работ по обе стороны от указанных границ радиоуправляемые переносные сигнализаторы ограждения, на месте проведения работ устанавливают коллективный переносной сигнализатор, снабжают каждого работающего на пути индивидуальным носимым оповещателем и руководителя работ - выносным пультом, при отсутствии подвижного состава датчик обнаружения подвижного состава формирует и передает с помощью соответствующей радиостанции на коллективный переносной сигнализатор сигналы, при приеме которых последний воспроизводит звуковые и оптические контрольные сигналы, а при обнаружении подвижного состава датчик обнаружения подвижного состава формирует и передает на коллективный переносной сигнализатор сигналы, при приеме которых последний воспроизводит звуковые и оптические сигналы оповещения, при этом контрольные сигналы и сигналы оповещения транслируют посредством коллективного переносного сигнализатора на индивидуальные носимые оповещатели, которые воспроизводят соответствующие звуковые, оптические и вибрационные сигналы, причем при наличии препятствий движения на месте проведения работ, а также при их отсутствии посредством коллективного переносного сигнализатора или выносного пульта задают соответствующий управляющий сигнал, который передают по радиоканалу на радиоуправляемые переносные сигнализаторы ограждения для формирования и включения сигнальных запрещающего показания или разрешающего показания, при этом, согласно изобретению, используют радиоуправляемые переносные сигнализаторы ограждения с функцией ретрансляции, перед началом работ устанавливают с каждой стороны от места проведения работ по меньшей мере один ретранслятор между датчиком обнаружения подвижного состава и радиоуправляемым переносным сигнализатором ограждения, а передачу сигналов от каждого датчика обнаружения подвижного состава на коллективный переносный сигнализатор осуществляют посредством соответствующих по меньшей мере одного ретранслятора и радиоуправляемого переносного сигнализатора ограждения.
Кроме того, радиоуправляемые переносные сигнализаторы ограждения осуществляют контроль сигнальных показаний с последующей передачей результатов контроля по радиоканалу на коллективный переносной сигнализатор, который сравнивает их с заданным управляющим сигналом и при совпадении формирует соответствующий сигнал, который передает по радиоканалу на выносной пульт, а при несовпадении сигналов формирует и воспроизводит звуковой аварийный сигнал.
Кроме того, для удобства установки датчиков обнаружения подвижного состава используют датчики, в корпусе каждого из которых закреплен магнит для установки на шейке рельса, а установку каждого датчика обнаружения подвижного состава осуществляют на шейке рельса с помощью указанного магнита.
Кроме того, используют датчики обнаружения подвижного состава, в корпусе каждого из которых закреплена соответствующая радиостанция.
Кроме того, установку радиоуправляемых переносных сигнализаторов ограждения и ретрансляторов осуществляют путем их закрепления на опорах контактной сети.
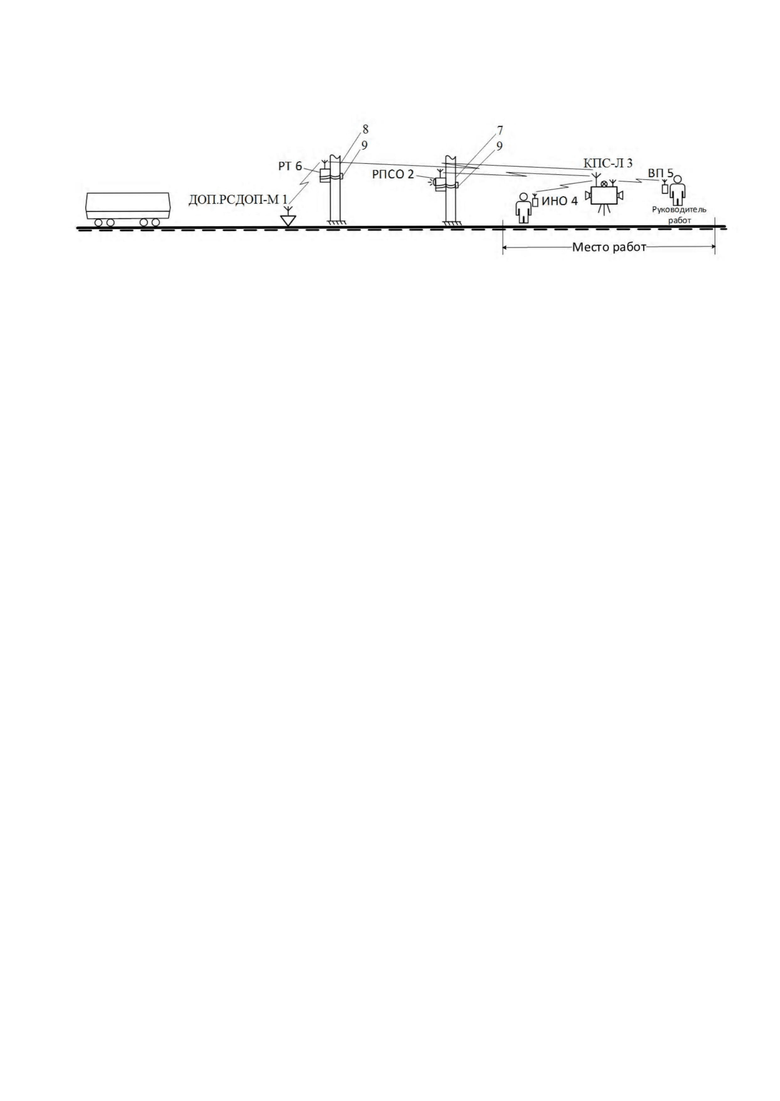
Изобретение поясняется чертежом, на котором представлена схема варианта выполнения системы для осуществления способа ограждения места проведения работ и оповещения работающих на железнодорожных путях для одного направления.
Система ограждения места проведения работ и оповещения работающих на железнодорожных путях (СОРБИС-М1) содержит установленные на рельсе железнодорожного пути на заданном расстоянии по обе стороны от границ места проведения работ датчики 1 обнаружения подвижного состава (условное обозначение ДОП.РСДОП-М), каждый из которых снабжен радиостанцией (радиомодемом), радиоуправляемые переносные сигнализаторы ограждения 2 (РПСО 2), размещенные на заданном расстоянии по обе стороны от границ места проведения работ, установленный на месте проведения работ коллективный переносной сигнализатор 3 (условное обозначение КПС-Л), индивидуальные носимые оповещатели 4 (ИНО 4) для каждого работающего на пути и выносной пульт 5 (ВП 5) руководителя работ, а также два ретранслятора 6 (РТ 6). На чертеже показан участок с одной стороны от места работ.
Конструкция каждого ДОП.РСДОП-М 1 включает магнит, который является неотъемлемой частью корпуса. ДОП.РСДОП-М 1 устанавливают с помощью магнита на шейке рельса на расстоянии, которое поезд, движущийся с максимальной для данного участка скоростью, проходит не менее чем за 60 с. В корпусе ДОП.РСДОП-М 1 также закреплена радиостанция.
КПС-Л 3 взаимодействует по радиоканалу непосредственно с ИНО 4, ВП 5 и РПСО 2, а через РТ 6 - с ДОП.РСДОП-М 1.
РТ 6 и РПСО 2 размещены на соответствующих опорах 7 и 8 контактной сети на определенной высоте с помощью запирающихся замком гибких крепежных хомутов 9. При этом РПСО 2 закреплены на опорах 7 контактной сети, расположенных на расстоянии 1000-1700 м от границ места проведения работ, а РТ 6 - по обе стороны от места проведения работ на опорах 8 контактной сети, расположенных на расстоянии 100-300 метров от ДОП.РСДОП-М 1.
РТ 6 используются для обеспечения гарантированной радиосвязи между ДОП.РСДОП-М 1 и КПС-Л 3 особенно на изогнутых участках железнодорожных путей, где их (РТ 6) может быть два и более.
Каждый РПСО 2 содержит излучатели красного и желтого цвета, контроллер, фотоприемники для анализа излучения соответственно излучателей, радиостанцию и блок питания в виде аккумуляторной батареи, при этом выходы контроллера подключены к входам излучателей, входы - к выходам фотоприемников, а вход/выход - к выходу/входу радиостанции (на чертеже не показаны).
Конструктивно КПС-Л 3 может быть выполнен в виде известного коллективного переносного устройства, содержащего устройство управления, формирователь акустических сигналов контроля и оповещения, усилитель и громкоговоритель, а также оптический излучатель, подключенный к другому выходу устройства управления, анализирующее устройство, выходом соединенное с входом устройства управления, приемопередатчик, вход/выход которого подключен к выходу/входу устройства управления, и установленный в непосредственной близости к громкоговорителю микрофон, соединенный с входом анализирующего устройства (см., например, RU 2583011 C1, 27.06.2016).
КПС-Л 3 обеспечивает воспроизведение звуковых и оптических сигналов контроля, звуковых и оптических сигналов оповещения, анализ качества воспроизводимых акустических сигналов и передачу по радиоканалу на ВП 5 информации о нормальном функционировании или об отказе РПСО 2.
ИНО 4 предназначен для индивидуального оповещения работающего на железнодорожных путях о приближении железнодорожного подвижного состава. ИНО 4 обеспечиваются работающие, местонахождение которых или условия выполнения работ ухудшают условия восприятия оповещения от КПС-Л 3.
ИНО 4 обеспечивает прием радиосигналов и воспроизведение звуковых, вибрационных и оптических сигналов оповещения при приеме по радиоканалу сигналов оповещения КПС-Л 3. Прием контрольных сигналов индицируется оптическим индикатором ИНО 4.
При этом КПС-Л 3 может быть оборудован системой автоматической регулировки звукового уровня в зависимости от уровня шума в зоне оповещения, обеспечивающей превышение уровня полезного сигнала над средним уровнем шума на 10 дБ, но не выше 120 дБ.
КПС-Л 3 имеет переключатель частоты, и в случае, если на месте работ рабочая частота занята или на ней помехи, то можно оперативно переключиться на другие заранее запрограммированные частоты. Всего частот шесть. При переключении частоты на КПС-Л 3 все остальные устройства системы автоматически получают команду и переключаются на эту частоту, кроме ИНО 4. ИНО 4 также имеет переключатель на шесть частот. Частоты ИНО 4 и КПС-Л 3 должны совпадать. Номер канала при переключении на ИНО 4 и КПС-Л 3 озвучивается речью.
ВП 5 руководителя работ выполнен с возможностью управления по радиоканалу через КПС-Л 3 РПСО 2. Кроме того на ВП 5 есть контрольная индикация, отображающая, каким цветом горит РПСО 2, и индикация его отказа. На ВП 5 есть также индикация о направлении (занято, незанято), речевое, звуковое и вибрационное оповещение обнаружения подвижного состава. На ВП 6 есть кнопка, которая в ручном режиме запускает оповещение на КПС-Л 3 и ИНО 4. Также есть кнопка отмены воспроизведения сигнала оповещения. ВП 6 имеет память и запись событий (вкл/выкл ВП, вкл/отмена сигнала, состояние РПСО, и.т.д.) с привязкой к реальному времени и координатам Глонасс/GPS с возможностью последующего считывания и копирования архива на внешний носитель.
Способ ограждения места проведения работ и оповещения работающих на железнодорожных путях осуществляется следующим образом.
Перед началом работы ДОП.РСДОП-М 1 с помощью магнита устанавливают на шейке рельса на заданном расстоянии по обе стороны от места проведения работ. РПСО 2 и РТ 6 закрепляют соответственно на опорах 7 и 8 контактной сети по обе стороны от места проведения работ. Указанные операции не требуют длительных трудозатрат. КПС-Л 3 размещают на месте проведения работ и снабжают работающих ИНО 4. Руководитель работ снабжен ВП 5.
После установки ДОП.РСДОП-М 1, РТ 6, РПСО 2 активизация их работы осуществляется путем включения питания на каждом устройстве. Для этого необходимо вставить ключ в разъем на каждом устройстве и повернуть в соответствующее положение. После установки и включения всех устройств, в том числе и ВП 5, необходимо также ключом включить КПС-Л 3 и нажать кнопку «НУ» (начальная установка). После этого КПС-Л 3 опрашивает все устройства, и на передней панели его загорается индикация состояния каждого устройства. Зеленый индикатор - радиосвязь есть, устройство исправно; красный - радиосвязь есть, устройство не исправно; не горит индикатор - нет радиосвязи.
При отсутствии подвижного состава датчик ДОП.РСДОП-М 1 формирует и передает с помощью своей радиостанции через ретранслятор РТ 6 и через РПСО 2 на КПС-Л 3 сигналы, при приеме которых КПС-Л 3 воспроизводит звуковые и оптические контрольные сигналы, а при обнаружении подвижного состава ДОП.РСДОП-М 1 формирует и передает через РТ 6 и РПСО 2 сигналы, при приеме которых КПС-Л 3 воспроизводит сигнал оповещения.
Сигналы оповещения, поступающие от радиостанции каждого ДОП.РСДОП-М 1, содержат информацию о направлении движения приближающегося к месту проведения работ подвижного состава.
Контрольные сигналы и сигналы оповещения транслируются КПС-Л 3 по радиоканалу на ИНО 4, которые воспроизводятся ими в виде звуковых, оптических и вибрационных сигналов.
Контрольные сигналы поступают на КПС-Л 3 от каждого ДОП.РСДОП-М 1 в разных временных интервалах, подтверждая отсутствие подвижного состава в каждом направлении.
КПС-Л 3 на основании информации об отсутствии подвижного состава с двух направлений воспроизводит общий тональный и оптический сигнал контроля.
При обнаружении одним из ДОП.РСДОП-М 1 приближающегося подвижного состава соответствующая ему радиостанция прекращает передачу контрольного сигнала и формирует сигнал оповещения, который передает по радиоканалу через РТ 6 и РПСО 2 на КПС-Л 3. Сигнал оповещения воспроизводится громкоговорителем и соответствующим оптическим излучателем КПС-Л 3.
Воспроизведение сигнала оповещения продолжается от момента обнаружения подвижного состава до окончания его прохода датчиков ДОП.РСДОП-М 1 плюс дополнительно 7-10 с.
К работе разрешается приступить только после проследования подвижным составом места работ.
При этом в начале воспроизведения сигнала оповещения КПС-Л 3 формирует речевой сигнал, воспроизводимый громкоговорителем, содержащий сообщение о направлении, по которому приближается поезд.
Речевой сигнал, который будет воспроизводиться, можно оперативно записать для однозначного понимания откуда идет поезд. Например - «Внимание! Поезд из Москвы!» или «Поезд по первому пути!». Для записи речевого сигнала на КПС-Л 3 предусмотрено подключение микротелефонной гарнитуры.
Если во время воспроизведения оповещения о приближении подвижного состава с одного из направлений на двухпутном участке будет обнаружен подвижной состав, приближающийся с другого направления, КПС-Л 3 воспроизводит через громкоговоритель речевое сообщение о направлении движения обнаруженного подвижного состава.
Направление движения приближающихся подвижных составов индицируется на панели управления и индикации КПС-Л 3 соответствующими оптическими индикаторами.
При нарушении связи КПС-Л 3 с одним из ДОП.РСДОП-М 1 в результате прекращения поступления контрольных сигналов КПС-Л 3 включает аварийную сигнализацию. При этом на его панели управления и индикации появляется информация об отказе конкретного ДОП.РСДОП-М 1.
Сигналы контроля и оповещения КПС-Л 3 в автоматическом режиме транслирует по радиоканалу на ИНО 4, воспроизводящие оптические сигналы контроля и звуковые, оптические и вибрационные сигналы оповещения в пределах участка работ.
С целью повышения надежности КПС-Л 3 в автоматическом режиме сравнивает воспроизводимые сигналы с принятыми сигналами и при их несовпадении воспроизводит сигнал аварии.
При наличии препятствий для движения на месте проведения работ руководитель с помощью элементов управления КПС-Л 3 или ВП 5 через КПС-Л 3 задает соответствующий управляющий сигнал и передает его по радиоканалу на РПСО 2 для формирования и включения запрещающего показания, требующего остановки поезда у границы места проведения работ. При отсутствии препятствий для движения на месте проведения работ КПС-Л 3 или ВП 5 передает через КПС-Л 3 на РПСО 2 по радиоканалу управляющий сигнал для формирования и включения показания, разрешающего движение поезда с установленной скоростью.
РПСО 2, получив управляющий сигнал от ВП 5, формирует соответствующее показание излучателей. Для формирования запрещающего показания контроллер РПСО 2 подает импульсное питающее напряжение на излучатель красного цвета, а при формировании разрешающего показания - на излучатель желтого цвета. В том и в другом случае излучатели красного и желтого цвета работают в мигающем режиме.
При этом фотоприемники РПСО 2 контролируют работу излучателей. В режиме излучения на выходе соответствующего фотоприемника формируется сигнал, который поступает на соответствующий вход контроллера. Контроллер передает на радиостанцию соответствующий квитирующий сигнал в качестве контрольных сигналов для передачи по радиоканалу на КПС-Л 3.
Радиостанция КПС-Л 3 в автоматическом режиме воспроизводит квитирующий сигнал от каждого РПСО 2 и передает его управляющему контроллеру, который сравнивает его с заданным управляющим сигналом и формирует соответствующий сигнал, который передает по радиоканалу на ВП 5. При несовпадении сигналов КПС-Л 3 формирует тональный аварийный сигнал.
При подтверждении запрещающего показания каждого РПСО 2 на панели ВП 5 сигнальные индикаторы каждого направления движения излучают красный мигающий огонь, а при подтверждении разрешающего показания они излучают желтый мигающий огонь.
При нарушении связи с РПСО 2 или при поступлении квитирующего сигнала, не соответствующего переданному управляющему сигналу, сигнальный индикатор на панели ВП 5 начинает светиться синим цветом, на панели КПС-Л 3 соответствующий индикатор начинает светиться красным цветом и КПС-Л 3 воспроизводит звуковой сигнал тревоги.
В каждом ДОП.РСДОП-М 1, РПСО 2 и РТ 6 предусмотрено наличие гироскопа для контроля первоначального (после включения устройства) положения. В случае изменения своего положения (падение, кража) на КПС-Л 3 звучит сигнал аварии, а индикатор устройства меняется на красный.
Таким образом, предложенное техническое решение обеспечивает безопасность движения и безопасность работающих на железнодорожных путях в результате уменьшения влияния на их обеспечение человеческого фактора, что позволяет также повысить производительность труда при выполнении работ по ремонту и текущему содержанию объектов железнодорожной инфраструктуры путем упрощения процесса установки датчиков обнаружения подвижного состава и устройств ограждения.
Изобретение относится к методам ограждения места работ с оповещением работающих на путях о приближении подвижного состава. В способе используют радиоуправляемые переносные сигнализаторы ограждения с функцией ретрансляции (РПСО 2), а также перед началом работ устанавливают с каждой стороны от места проведения работ по меньшей мере один ретранслятор (РТ 6) между датчиком обнаружения подвижного состава (ДОП.РСДОП-М 1) и радиоуправляемым переносным сигнализатором ограждения (РПСО 2), а передачу сигналов от каждого датчика обнаружения подвижного состава (ДОП.РСДОП-М 1) на коллективный переносный сигнализатор (КПС-Л 3) осуществляют посредством соответствующих по меньшей мере одного ретранслятора (РТ 6) и радиоуправляемого переносного сигнализатора ограждения (РПСО 2). Достигается повышение надёжности передачи сигналов датчиков обнаружения подвижного состава при значительных расстояниях их от места работ и на изогнутых участках пути. 5 з.п. ф-лы, 1 ил.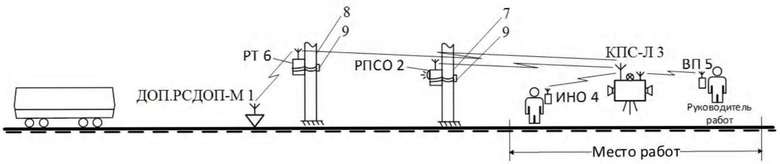
1. Способ ограждения места проведения работ и оповещения работающих на железнодорожных путях, заключающийся в том, что перед началом работ устанавливают по обе стороны от границ места проведения работ датчики обнаружения подвижного состава, устанавливают ближе к границам места проведения работ по обе стороны от указанных границ радиоуправляемые переносные сигнализаторы ограждения, на месте проведения работ устанавливают коллективный переносной сигнализатор, снабжают каждого работающего на пути индивидуальным носимым оповещателем и руководителя работ - выносным пультом, при отсутствии подвижного состава датчик обнаружения подвижного состава формирует и передает с помощью соответствующей радиостанции на коллективный переносной сигнализатор сигналы, при приеме которых последний воспроизводит звуковые и оптические контрольные сигналы, а при обнаружении подвижного состава датчик обнаружения подвижного состава формирует и передает на коллективный переносной сигнализатор сигналы, при приеме которых последний воспроизводит звуковые и оптические сигналы оповещения, при этом контрольные сигналы и сигналы оповещения транслируют посредством коллективного переносного сигнализатора на индивидуальные носимые оповещатели, которые воспроизводят соответствующие звуковые, оптические и вибрационные сигналы, причем при наличии препятствий движения на месте проведения работ, а также при их отсутствии посредством коллективного переносного сигнализатора или выносного пульта задают соответствующий управляющий сигнал, который передают по радиоканалу на радиоуправляемые переносные сигнализаторы ограждения для формирования и включения сигнальных запрещающего показания или разрешающего показания, отличающийся тем, что используют радиоуправляемые переносные сигнализаторы ограждения с функцией ретрансляции, а также перед началом работ устанавливают с каждой стороны от места проведения работ по меньшей мере один ретранслятор между датчиком обнаружения подвижного состава и радиоуправляемым переносным сигнализатором ограждения, а передачу сигналов от каждого датчика обнаружения подвижного состава на коллективный переносный сигнализатор осуществляют посредством соответствующих по меньшей мере одного ретранслятора и радиоуправляемого переносного сигнализатора ограждения.
2. Способ по п. 1, отличающийся тем, что радиоуправляемые переносные сигнализаторы ограждения осуществляют контроль сигнальных показаний с последующей передачей результатов контроля по радиоканалу на коллективный переносной сигнализатор, который сравнивает их с заданным управляющим сигналом и при совпадении формирует соответствующий сигнал, который передает по радиоканалу на выносной пульт, а при несовпадении сигналов формирует и воспроизводит звуковой аварийный сигнал.
3. Способ по п. 1, отличающийся тем, что используют датчики обнаружения подвижного состава, в корпусе каждого из которых закреплен магнит для установки на шейке рельса, а установку каждого датчика обнаружения подвижного состава осуществляют на шейке рельса с помощью указанного магнита.
4. Способ по п. 1, отличающийся тем, что используют датчики обнаружения подвижного состава, в корпусе каждого из которых закреплена соответствующая радиостанция.
5. Способ по п. 1, отличающийся тем, что установку радиоуправляемых переносных сигнализаторов ограждения осуществляют путем их закрепления на опорах контактной сети.
6. Способ по п. 1, отличающийся тем, что установку ретрансляторов осуществляют путем их закрепления на опорах контактной сети.
| Способ ограждения места проведения работ и оповещения работающих на железнодорожных путях | 2017 |
|
RU2655566C1 |
| Автоматический сцепной железнодорожный прибор | 1931 |
|
SU28513A1 |
| Прямодействующий автоматический воздушный тормоз для железнодорожных повозок | 1928 |
|
SU28519A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОГРАЖДЕНИЯ МЕСТА РАБОТ И ОПОВЕЩЕНИЯ РАБОТАЮЩИХ НА ЖЕЛЕЗНОДОРОЖНЫХ ПУТЯХ О ПРИБЛИЖЕНИИ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА БЕЗ ИСПОЛЬЗОВАНИЯ СИГНАЛИСТОВ (СОРБИС-М), найдено в интернет: | |||

