Изобретение относится к области морской техники и предназначено для освещения подводной обстановки.
Известно, что для наблюдения за подводной средой на флотах мира используют различные измерительные устройства, основанные на регистрации в водной среде объектов и присущих им физических полей. Из-за особенностей распространения в воде различных видов энергии наиболее широкое распространение получили гидроакустические средства наблюдения, основанные на законах распространения в воде звука.
Для поиска подводных объектов применяются корабли, авиация, стационарные системы, а также подводные аппараты, оснащаемые средствами обнаружения, в качестве которых используют гидроакустические станции (ГАС) или комплексы, радиогидроакустические буи (РГБ), взрывные источники звука [Военно-морской словарь / Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989. - 511 с. С. 13, 75, 352], или приборы, измеряющие различные физические поля, присущие подводным объектам, например магнитометры [Б.И. Родионов. Противолодочные силы и средства флотов. - М.: Воениздат, 1977].
Множество элементов, находящихся в закономерных отношениях и связях друг с другом, образующих определенную целостность, единство и подчиненность определенному организующему признаку, представляют собой систему, а в совокупности со способами и правилами их использования - смешанную систему [Военно-морской словарь / Гл. ред. В.Н. Чернавин. М.: Воениздат, 1989]. Применяемые для поиска корабли, авиация, стационарные системы, а также технические устройства (ГАС, РГБ и подводные аппараты) входят составляющими элементами в создаваемые мобильные и стационарные системы освещения подводной обстановки. Время функционирования системы освещения подводной обстановки может составлять от нескольких часов до нескольких суток на период выполнения ею поисковых задач (носители с ГАС, РГБ), а также достигать нескольких месяцев и даже лет (подводные аппараты с большой автономностью и стационарные ГАС).
Существующие средства поиска и освещения подводной обстановки зачастую демаскируют себя работой устройств, излучающих различные шумы. Стационарные пассивные средства наблюдения менее заметны для объектов поиска, но отсутствие мобильности является их недостатком.
Относительно малую заметность имеют самоходные подводные аппараты, разрабатываемые для океанологических исследований и морской геологоразведки с конца 1960-х гг. [Автономные подводные аппараты. Материалы сайта Института проблем морских технологий Дальневосточного отделения РАН, 2002]. В настоящее время самоходные необитаемые подводные аппараты (НПА) считаются в ведущих морских державах приоритетным направлением, они применяются с надводных кораблей и подводных лодок [И. Белоусов. Современные и перспективные необитаемые подводные аппараты ВМС США // Зарубежное военное обозрение №5, 2013. С. 79-88]. В ВМС США с 1996 г. реализуется программа разработки автономных НПА нового поколения «Манта», предназначенных для обнаружения и уничтожения подводных лодок, мин и других подводных целей, а также ведения разведки, решения обеспечивающих и специальных задач [Сиденко К.С., Илларионов Г.Ю. Подводная лодка и автономный необитаемый подводный аппарат // МРЭ, №2, 2008].
Бортовая поисковая аппаратура самоходного НПА включает ГАС переднего и бокового обзора, цифровую видеокамеру, датчики для измерения параметров морской воды (температуры и удельной электрической проводимости). Полученные данные записываются на жесткий магнитный накопитель для последующего анализа результатов после подъема НПА на борт носителя. Для обеспечения двусторонней связи между пунктом управления и НПА в позиционном положении используют системы спутниковой навигации и звукоподводной связи. Для применения НПА и управления им на позиции на носитель устанавливают модули в габаритах морских транспортных контейнеров, спускоподъемное устройство, сменный комплект аккумуляторных батарей и автоматизированное рабочее место (АРМ) оператора. АРМ оператора комплектуется персональным переносным компьютером и предназначено для планирования операции, ввода данных, отображения на дисплее с цветовым кодированием информации формы и размеров гидролокационного изображения объекта [Белоусов И. Современные и перспективные необитаемые подводные аппараты ВМС США // Зарубежное военное обозрение №5, 2013. С. 79-88].
Самоходные НПА имеют корпус обтекаемой цилиндрической или иной формы, средства движения и энергообеспечения, гидроакустические и телевизионные средства поиска подводных объектов, навигационное оборудование, средства связи, отсек для полезной нагрузки, приборы управления. Для передачи на пункт управления информации об обнаруженных подводных объектах НПА оборудуют аппаратурой связи с гидроакустическим или радиотехническим каналом. Точность определения координат обнаруженных НПА объектов зависит от ошибок его навигационной системы, для уменьшения которых, особенно при длительной автономной работе, НПА оборудуют системой спутниковой навигации. Периодичность сеанса уточнения места НПА зависит от требуемой точности навигации и характеристик имеющейся навигационной системы [Сиденко К.С., Илларионов Г.Ю. Подводная лодка и автономный необитаемый подводный аппарат // МРЭ, №2, 2008]. В целях дистанционного управления НПА используют акустический модем [Акустический модем АМ-300. http://www.diveservice.ru/].
Известен самоходный автономный НПА ALTEX, используемый для океанографических исследований и маркировки своей траектории подо льдом, для чего на НПА загружают 12 радиобуев. Радиобуи способны проплавлять лед и выносить на поверхность льда антенну связи со спутником. Перед выпуском буя НПА снижает скорость хода до 1 уз., переходит на глубину 50 м и выполняет поиск льда толщиной до 1 м. Обнаружив подходящее место, НПА выпускает радиобуй, который приледняется к нижней кромке льда, раздвигает телескопический корпус и подает к точке соприкосновения со льдом химический состав Pyrosolve-Z. В результате взаимодействия данного химического состава и морской воды запускается экзотермическая химическая реакция. Выделяемого в процессе реакции тепла хватает для проплавления льда, имеющего толщину 1 м. В образовавшееся отверстие из радиобуя выдвигается на поверхность антенна, служащая для связи со спутником [В.А. Катенин, А.В. Катенин. Минная угроза и навигационно-гидрографическое обеспечение противоминных действий // Оборонный заказ, интернет-приложение №15, 2007. http://www.ozakaz.ru/index.php/articles/n-15-06-2007/167-2011-03-26-18-16-341.
Известен способ освещения подводной обстановки, выбранный в качестве прототипа изобретения, при котором производят поиск подводных объектов с применением самоходного автономного НПА, оснащенного системой обнаружения цели при движении по заданному маршруту, который устанавливают в его бортовую систему управления перед пуском, обнаруживают подводный объект системой обнаружения цели, передают информацию о цели на пункт управления по действующей линии связи, классифицируют обнаруженную цель, контролируют на пункте управления точность удержания места НПА на заданном маршруте по времени его движения под управлением инерциальной навигационной системы и в случае ее уменьшения ниже допустимой выстреливают в район действия НПА реактивный РГБ, с помощью которого уточняют географическое положение НПА и обнаруженных им подводных объектов [Патент RU 2578807 С2. Способ освещения подводной обстановки/ Новиков А.В., Корнеев Г.Н., Королев В.Э. - М.: ФИПС, 2016. Бюл. №9].
Однако указанный выше способ освещения подводной обстановки, основанный на применении самоходного автономного НПА, также имеет недостатки. Для такого НПА характерна малая скрытность вследствие наличия демаскирующих признаков, сопровождающих работу его двигательно-движительной установки, использования бортовой ГАС в активном режиме или средств звукоподводной связи, а также малая автономность, ограниченная возможностями системы энергообеспечения средств движения НПА.
В начале 2000-х гг. в США появились автономные НПА с переменной плавучестью - глайдеры, отличительной особенностью которых является полное отсутствие двигательно-движительной установки. Глайдеры приводятся в движение за счет изменения своей плавучести, используя ее в качестве движущей силы. Они имеют большую автономность (до нескольких месяцев) и малую гидроакустическую заметность. Их оснащение бортовыми измерительно-информационными комплексами позволяет вести скрытный сбор гидрологической и другой интересующей информации. Управление глайдером осуществляют по программе бортового процессора с использованием системы курсоуказания, считывающего устройства, глубиномера, кренометра и дифферентометра. Каждые 2-3 ч производят всплытие глайдера в позиционное положение для обмена данными с пунктом управления с помощью аппаратуры системы спутниковой связи, а также для уточнения местоположения по данным космической радионавигационной системы, антенные устройства которых установлены на вертикальном стабилизаторе [Белоусов И. Современные и перспективные необитаемые подводные аппараты ВМС США // Зарубежное военное обозрение №5, 2013. С. 79-88].
Прототипом предлагаемого устройства является глайдер, который в качестве полезной нагрузки несет навесное оборудование, закрепленное на корпусе, а также гибкую протяженную буксируемую антенну (ГПБА) длиной 15 м, используемую для поиска подводных объектов [Аспекты практического применения подводных глайдеров на базе опытной эксплуатации // Журнал «Новый оборонный заказ», СПб., №4 (41), 2016. http://dfnc.ru/category/2016-4-41/]. Недостатками глайдера является дискретность связи с пунктом управления (1 раз в 2-3 часа) и невозможность его работы подо льдом.
Целями изобретения является разработка способа и устройства освещения подводной обстановки, которые в значительной степени лишены указанных выше недостатков, то есть позволяют производить наблюдение за подводной средой в заданном районе скрытно и продолжительное время при наличия льда на поверхности моря и оперативно информировать пункт управления об обнаруженных подводных объектах.
Предлагается способ освещения подводной обстановки, при котором производят поиск подводных объектов автономным необитаемым подводным аппаратом (НПА), оснащенным системой обнаружения цели при его движении по заданному маршруту, для чего устанавливают маршрут в бортовую систему управления НПА перед пуском, обнаруживают подводный объект, передают информацию о цели на пункт управления по действующей линии связи, классифицируют обнаруженную цель, контролируют на пункте управления точность удержания места НПА на заданном маршруте. Дополнительно в качестве НПА применяют подводный аппарат с переменной плавучестью, на корпусе которого закрепляют не менее одного радиобуя, оснащают его гибкой протяженной буксируемой антенной для поиска подводных объектов, радиобуй оснащают устройством для плавления льда, с обнаружением подводной цели и ее распознаванием записывают данные о ней на запоминающее устройство радиобуя, устройством для определения толщины льда обследуют толщину ледового покрова, в месте, где толщина льда соответствует заданной, отделяют радиобуй от корпуса НПА и под действием его положительной плавучести обеспечивают всплытие радиобуя и его приледнение к нижней кромке льда, где с помощью устройства для плавления льда проплавляют во льду отверстие, в которое выдвигают антенну и поднимают на поверхность для организации связи со спутником или летательным аппаратом.
Для реализации разработанного способа предлагается устройство освещения подводной обстановки, представляющее собой подводный аппарат с переменной плавучестью, оснащенный бортовыми системами управления, курсоуказания и обнаружения цели с гибкой протяженной буксируемой антенной. Дополнительно на корпусе НПА устанавливается узел крепления, к которому крепится радиобуй, имеющий запоминающее устройство, связанное с бортовой системой управления НПА, НПА оснащается устройством для определения толщины льда, а радиобуй устройством для плавления льда.
Техническое осуществление предлагаемых способа и устройства освещения подводной обстановки иллюстрируется чертежами, на которых:
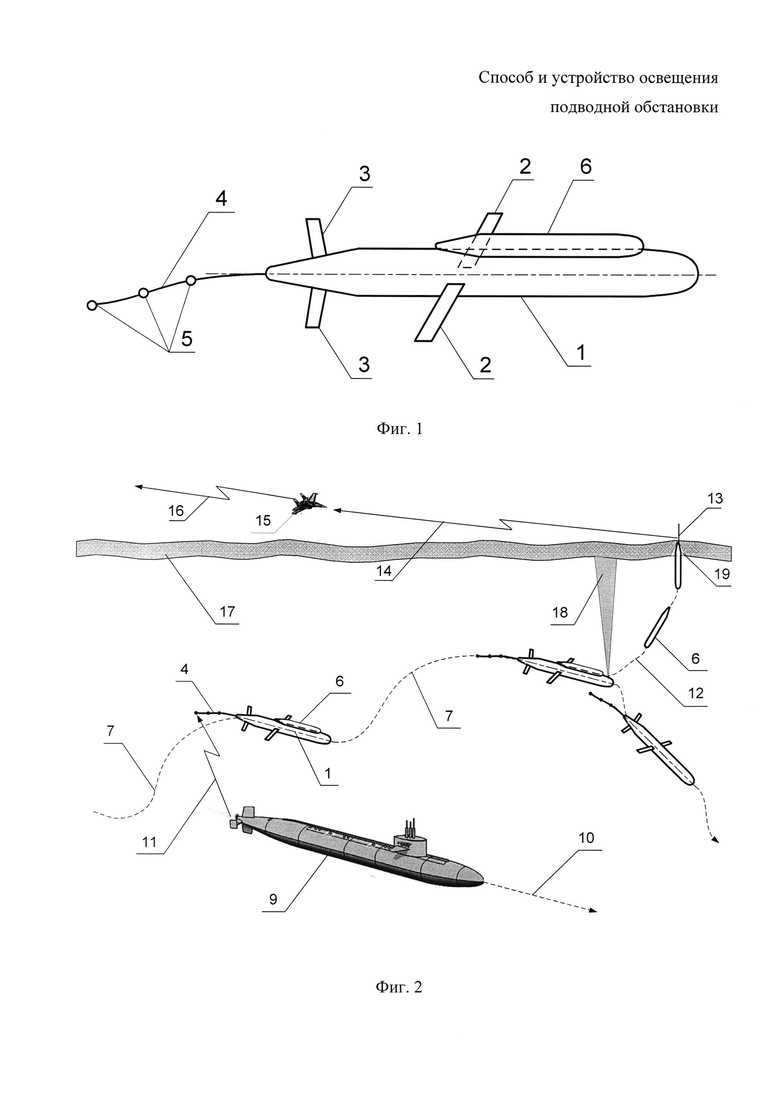
Фиг. 1 - устройство освещения подводной обстановки;
Фиг. 2 - способ освещения подводной обстановки.
На фиг. 1 показано устройство освещения подводной обстановки и его основные элементы: 1 - корпус НПА; 2 - горизонтальное крыло; 3 - вертикальный руль-стабилизатор; 4 - гибкая буксируемая протяженная антенна (ГПБА); 5 - гидрофон; 6 - радиобуй.
На фиг. 2 изображен способ освещения подводной обстановки с использованием предлагаемого устройства. Цифрами обозначены: 1 - корпус НПА; 4 - гибкая буксируемая протяженная антенна; 6 - радиобуй; 7 - слой льда; 8 - подводный объект (цель); 9 - траектория подводного объекта (цели); 10 - обнаружение подводного объекта (цели) гидрофонами ГПБА; 11 - траектория НПА; 12 - обследование НПА толщины ледового покрова; 13 - отсоединение радиобуя от НПА; 14 - проплавленное во льду отверстие; 15 - антенна всплывшего радиобуя; 16 - передача информации об обнаруженном подводном объекте (цели) с антенны всплывшего радиобуя на летательный аппарат; 17 - летательный аппарат; 18 - передача информации об обнаруженном подводном объекте (цели) с летательного аппарата на пункт управления.
Техническими результатами предлагаемых способа и устройства освещения подводной обстановки являются возможность длительно и скрытно вести наблюдение за подводной средой в заданном районе при наличии в нем ледового покрова, оперативно передавать данные об обнаруженном объекте на пункт управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2709059C1 |
| УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2018 |
|
RU2735447C2 |
| Автономное устройство обнаружения нарушителей на морском участке границы | 2022 |
|
RU2785655C1 |
| РАДИОБУЙ ПОДВОДНОЙ ЛОДКИ | 2017 |
|
RU2688544C1 |
| РАДИОБУЙ ПОДВОДНОГО ПЛАВСРЕДСТВА ПОДЛЕДНЫЙ | 2018 |
|
RU2690788C1 |
| ПОИСКОВЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2017 |
|
RU2650298C1 |
| СПОСОБ ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2668494C2 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| САМОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ И СПОСОБ ЕГО ПОДЪЕМА ИЗ-ПОДО ЛЬДА | 2019 |
|
RU2729852C1 |
| СИСТЕМА ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2659314C2 |
Изобретение относится к области морской техники и предназначено для освещения подводной обстановки. Предлагается способ освещения подводной обстановки, при котором производят поиск подводных объектов автономным необитаемым подводным аппаратом (НПА), оснащенным системой обнаружения цели при его движении по заданному маршруту. В качестве НПА применяют подводный аппарат с переменной плавучестью, на корпусе которого закрепляют не менее одного радиобуя, оснащают его гибкой протяженной буксируемой антенной для поиска подводных объектов, радиобуй оснащают устройством для плавления льда, с обнаружением подводной цели и ее распознаванием записывают данные о ней на запоминающее устройство радиобуя, обследуют толщину ледового покрова, в месте, где толщина льда соответствует заданной, отделяют радиобуй от корпуса НПА и обеспечивают приледнение радиобуя к нижней кромке льда, где проплавляют во льду отверстие, в которое выдвигают антенну и поднимают на поверхность для организации связи со спутником или летательным аппаратом. Предложено также устройство освещения подводной обстановки. Технический результат заключается в возможности длительно и скрытно вести наблюдение за подводной средой в заданном районе при наличии в нем ледового покрова, оперативно передавать данные об обнаруженном объекте на пункт управления. 2 н.п. ф-лы, 2 ил.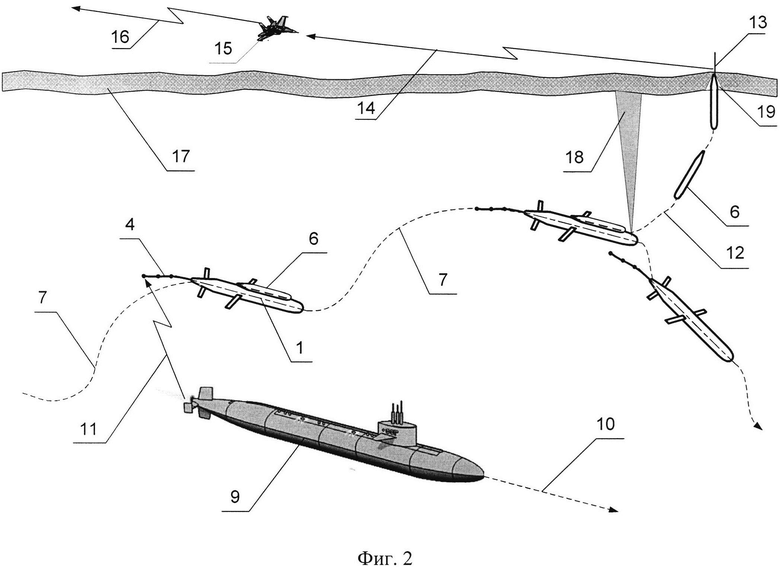
1. Способ освещения подводной обстановки, при котором производят поиск подводных объектов автономным необитаемым подводным аппаратом (НПА), оснащенным системой обнаружения цели при его движении по заданному маршруту, для чего устанавливают маршрут в бортовую систему управления НПА перед пуском, обнаруживают подводный объект, передают информацию о цели на пункт управления по действующей линии связи, классифицируют обнаруженную цель, контролируют на пункте управления точность удержания места НПА на заданном маршруте, отличающийся тем, что в качестве НПА применяют подводный аппарат с переменной плавучестью, на корпусе которого закрепляют не менее одного радиобуя, оснащают его гибкой протяженной буксируемой антенной для поиска подводных объектов, радиобуй оснащают устройством для плавления льда, с обнаружением подводной цели и ее распознаванием записывают данные о ней на запоминающее устройство радиобуя, устройством для определения толщины льда обследуют толщину ледового покрова, в месте, где толщина льда соответствует заданной, отделяют радиобуй от корпуса НПА и под действием его положительной плавучести обеспечивают всплытие радиобуя и его приледнение к нижней кромке льда, где с помощью устройства для плавления льда проплавляют во льду отверстие, в которое выдвигают антенну и поднимают на поверхность для организации связи со спутником или летательным аппаратом.
2. Устройство освещения подводной обстановки, представляющее собой подводный аппарат с переменной плавучестью, оснащенный бортовыми системами управления, курсоуказания и обнаружения цели с гибкой протяженной буксируемой антенной, отличающийся тем, что на корпусе НПА устанавливается узел крепления, к которому крепится радиобуй, имеющий запоминающее устройство, связанное с бортовой системой управления НПА, НПА оснащается устройством для определения толщины льда, а радиобуй устройством для плавления льда.
| Статья "Аспекты практического применения подводных глайдеров на базе опытной эксплуатации" | |||
| Журнал "Новый оборонный заказ", 4 (41), 2016 | |||
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2578807C2 |
| РЕАКТИВНАЯ СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2012 |
|
RU2510353C2 |
| JP H10111352 A, 28.04.1998 | |||
| УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ СРЕДЫ РЕАКТИВНЫМ СНАРЯДОМ СО ВЗРЫВНЫМ ИСТОЧНИКОМ ЗВУКА (ВАРИАНТЫ) | 2009 |
|
RU2397916C1 |
| US 5119341 A, 02.06.1992. | |||

