Изобретение относится к области морской техники и может быть использовано для поиска морских объектов.
Известно, что для поиска морских объектов используют различные измерительные устройства, основанные на регистрации в водной среде материальных тел и присущих им физических полей. Из-за особенностей распространения в воде различных видов энергии наиболее широкое распространение получили гидроакустические средства поиска, основанные на законах распространения в воде звука.
Одним из подобных устройств является радиогидроакустический буй (РГБ), включающий корпус, батарею, парашютную систему, передатчик, приемник с гидрофонами, запоминающее устройство, кабель-трос, антенну, механизм автоотцепа, блок управления, часовой механизм [1 - Техническое описание радиогидроакустического буя РГБ-Н-СТ. - М.: Воениздат, 1974]. РГБ состоят на вооружении Военно-морских сил многих государств уже долгое время и применяются авиацией для наблюдения за подводной средой [2 - Б.И. Родионов. Противолодочные силы и средства флотов. - М.: Воениздат, 1977]. Недостатком РГБ являются ограничения, связанные с возможностями его применения в плохих погодных условиях, а также в арктических морях, покрытых льдом.
Известен радиогидроакустический буй реактивный (РГБР), доставляемый в район поиска ракетой [3 - Патент RU 2400392 С1. Устройство радиогидроакустический буй реактивный / Новиков А.В., Никитченко Н.П., Долбилин Р.В., Никитченко С.Н. - М.: ФИПС, 2010. Бюл. №27]. Так как носителями РГБР являются надводные корабли и суда, то по погодным условиям их применение имеет меньше ограничений, чем при использовании авиации. Однако наличие ледового покрова не дает возможности использовать и РГБР.
Известен подводный аппарат (ПА), применяемый ведущими морскими державами для поиска морских объектов и физического воздействия на них. Таким подводным аппаратом, представляющим собой самодвижущийся, само- или телеуправляемый подводный снаряд, является торпеда, которая состоит из головной части с размещающимися в ней зарядом взрывчатого вещества, взрывателем, бортовой системой управления (БСУ), средней части, в которой находятся источник энергии и двигатель, и хвостовой части с движителем, приводами рулевых машинок и наружным оперением с рулями [4 - Военно-морской словарь / Гл. ред. В.Н. Чернавин. - М.: Воениздат, 1989. - 511 с. С. 431]. Недостатком торпеды является небольшая продолжительность функционирования, определяемая временем работы ее энергосиловой установки, что не позволяет применять ее в качестве эффективного поискового средства.
В общем случае ПА подразделяются на обитаемые и необитаемые, которые в свою очередь делятся на автономные (АНПА) и дистанционно управляемые (ДУПА). АНПА и ДУПА способны эффективно решать задачи поиска, обнаружения, идентификации и уничтожения морских мин, не подвергая людей риску, вести гидроакустическую разведку, собирать гидрографическую и батиметрическую информацию, обследовать районы планируемых операций, подводные гидротехнические сооружения и др. [5 - И. Белоусов. Современные и перспективные необитаемые подводные аппараты ВМС США // Зарубежное военное обозрение, 2013, №5. С. 79-88].
Корпус ПА обычно имеет обтекаемую цилиндрическую форму, иногда другую, как, например, у АНПА «Манта». ПА оснащают средствами движения и энергообеспечения, гидроакустическими и телевизионными средствами поиска, навигационным оборудованием, средствами связи, отсеком для полезной нагрузки и приборами управления [6 - Сиденко К.С., Илларионов Г.Ю. Подводная лодка и автономный необитаемый подводный аппарат // Морская радиоэлектроника, №2, 2008]. Однако ПА имеет ограниченную область возможного применения. Так, для наблюдения за подводной средой и ведения поисковых действий в ледовых условиях, существующие ПА малопригодны из-за недостаточной автономности и поисковой производительности, а также из-за отсутствия устойчивой связи с пунктом управления, находящимся на поверхности.
Наиболее близким аналогом предлагаемого технического решения является АНПА ALTEX, используемый для океанографических исследований и маркировки траектории АНПА подо льдом, для чего на АНПА загружают 12 радиобуев. Радиобуи способны проплавлять лед и выносить на поверхность льда антенну связи со спутником. Перед выпуском буя АНПА снижает скорость хода до 1 уз, переходит на глубину 50 м и выполняет поиск льда толщиной до 1 м. Обнаружив подходящее место, АНПА выпускает радиобуй, который приледняется к нижней кромке льда, раздвигает телескопический корпус и подает к точке соприкосновения со льдом химический состав Pyrosolve-Z. В результате взаимодействия данного химического состава и морской воды запускается экзотермическая химическая реакция. Выделяемого в процессе реакции тепла хватает для проплавления льда, имеющего толщину 1 м. В образовавшееся отверстие из радиобуя выдвигается на поверхность антенна, служащая для связи со спутником [7 - В.А. Катенин, А.В. Катенин. Минная угроза и навигационно-гидрографическое обеспечение противоминных действий // Оборонный заказ, интернет-приложение №15, 2007. http://www.ozakaz.ru/index.php/articles/n-15-06-2007/167-2011-03-26-18-16-34]. Однако функциональные возможности АНПА ALTEX также ограниченны, так как он не имеет средств поиска подводных объектов.
Целью изобретения является разработка подводного аппарата, способного осуществлять поиск подводных объектов в заданном районе, в том числе покрытом льдом, а также разработка способа применения такого подводного аппарата при проведении поиска.
Для достижения цели изобретения предлагается поисковый подводный аппарат, несущий в качестве полезной нагрузки буи, оборудованные телескопическим поплавком с устройством для плавления льда и выдвижной антенной, оснащенный бортовой системой управления, связи и навигации, источником энергии, двигателем, движителем, приводами рулевых машинок и наружным оперением с рулями, имеющий устройство отделения буев и приемоизлучающее устройство для определения толщины льда. Дополнительно поисковый подводный аппарат оснащается акустическим модемом и плавучим якорем с устройством его постановки, буи являются радиогидроакустическими и дополнительно оборудуются акустическим модемом.
Радиогидроакустические буи предназначаются для наблюдения за подводной обстановкой, поиска подводных объектов и передачи информации об обнаруженных объектах на командный пункт.
Передача информации на командный пункт производится по радиотехнической и/или гидроакустической линиям связи. При отсутствии прямой связи РГБ с командным пунктом применяется ретранслятор: летательный аппарат, надводный корабль (судно), АНПА или подводная лодка.
Подводный аппарат после постановки всех РГБ ложится в дрейф или на грунт и контролирует работу РГБ. Для предотвращения сильного дрейфа или сноса он использует плавучий якорь.
Предлагается способ применения поискового подводного аппарата, включающий приготовление подводного аппарата к пуску, в ходе которого проверяют работоспособность его бортовой системы управления, вводят в нее программу и маршрут движения, производят пуск подводного аппарата с носителя и движение его по заданному маршруту в расчетную или заданную точку, осуществляют подвсплытие подводного аппарата на заданную глубину, где производят поиск льда с допустимой толщиной, отделяют первый буй, выполняют движение подводного аппарата в следующую точку, обследуют толщину льда и выпускают второй буй, повторяют эту операцию до израсходования всех буев, после выпуска буя с подводного аппарата производят его всплытие и приледнение к нижней кромке льда, с помощью устройства для плавления льда подают к месту контакта со льдом морскую воду и реагирующий с ней химический состав, запускают экзотермическую реакцию, расплавляют во льду отверстие и выдвигают через него на поверхность антенну. Для поиска подводных объектов используют радиогидроакустические буи, после приледнения буя отделяют его нижнюю часть с расположенными в ней гидрофонами и акустическим модемом, разматывают кабель, заглубляют ее на установленную глубину поиска и начинают поиск подводных объектов, после выпуска всех буев укладывают подводный аппарат на грунт или в дрейф или на плавучий якорь и используют его в качестве подводного ретранслятора для передачи информации от акустического модема буя на командный пункт, обнаруживают гидрофоном буя подводный объект и передают об этом информацию на командный пункт по линии радиосвязи и/или по линии звукоподводной связи.
Поисковый подводный аппарат выставляется с носителя, которым может быть подводная лодка, надводный корабль или судно, безэкипажный катер, летательный аппарат или береговой комплекс.
Сущность разработанного способа применения автономного поискового подводного аппарата при поиске подводных объектов показана на фиг. 1 и 2.
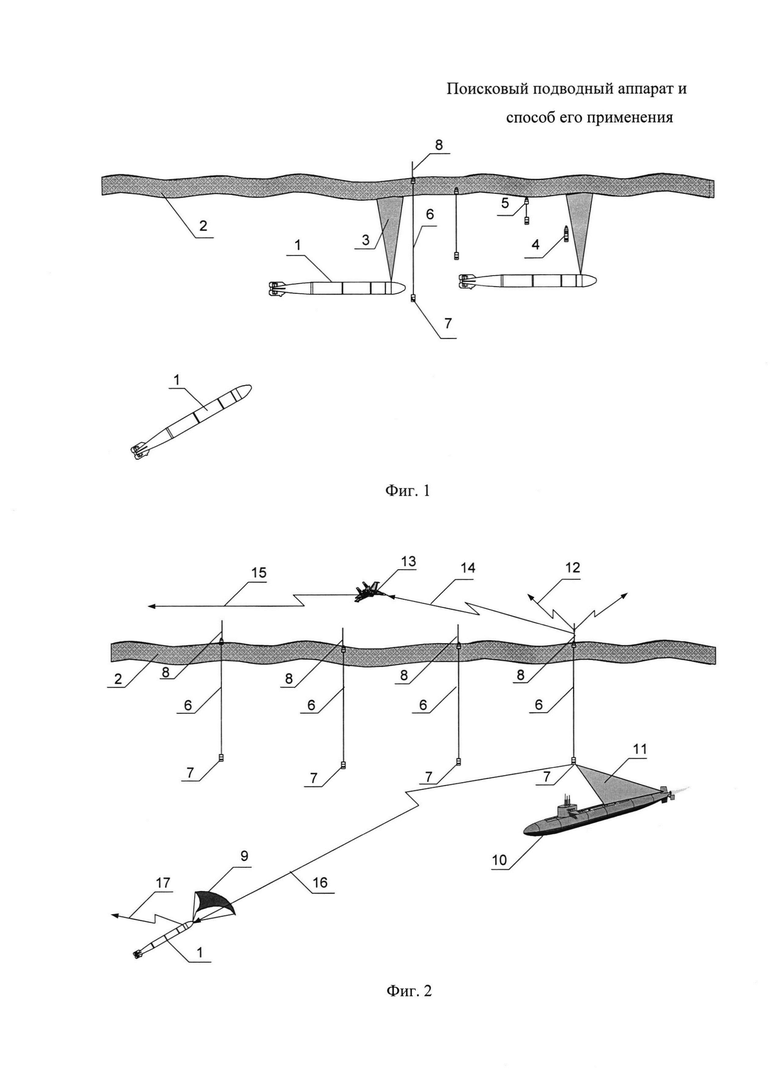
На фиг. 1 представлен процесс постановки поисковым подводным аппаратом радиогидроакустических буев. Цифрами обозначены: 1 - поисковый подводный аппарат (ППА); 2 - слой льда; 3 - зондирующий луч и обследование толщины льда ППА в расчетной точке; 4 - РГБ, выпущенный с ППА; 5 - верхняя часть (поплавок) РГБ с устройством для плавления льда и выдвижной антенной после приледнения к нижней кромке льда; 6 - кабель РГБ; 7 - нижняя часть РГБ с гидрофонами и акустическим модемом; 8 - выдвинутая на поверхность антенна РГБ.
На фиг. 2 показана работа радиогидроакустических буев и поискового подводного аппарата при поиске и обнаружении подводного объекта. Цифрами обозначены: 1 - ППА, находится в дрейфе и контролирует работу РГБ; 2 - слой льда; 6 - кабель РГБ; 7 - нижняя часть РГБ с гидрофонами и акустическим модемом; 8 - выдвинутая на поверхность антенна РГБ; 9 - плавучий якорь, выставленный ППА для уменьшения дрейфа; 10 - подводный объект; 11 - зона срабатывания гидрофона РГБ, обнаружившего подводный объект; 12 - передача антенной РГБ радиосигнала об обнаружении подводного объекта; 13 - летательный аппарат; 14 - прием радиосигнала РГБ летательным аппаратом; 15 - ретрансляция радиосигнала РГБ летательным аппаратом на командный пункт; 16 - излучение гидроакустического сигнала акустическим модемом РГБ об обнаружении подводного объекта и прием его ППА; 17 - переизлучение ППА гидроакустического сигнала РГБ об обнаружении подводного объекта на командный пункт.
Техническим результатом предложенного поискового подводного аппарата и способа его применения при поиске подводных объектов является возможность осуществления наблюдения за подводной средой и проведения поиска подводных объектов в районах, покрытых льдом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА ПОДВОДНЫХ ОБЪЕКТОВ ПОДО ЛЬДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662323C1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2709059C1 |
| СПОСОБ И УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2655592C1 |
| СПОСОБ ПРИМЕНЕНИЯ НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА ПОДО ЛЬДОМ | 2020 |
|
RU2757006C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И КОНТРОЛЯ В НЕМ АКУСТИЧЕСКИХ ОБЪЕКТОВ | 2023 |
|
RU2806775C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| СПОСОБ МОНИТОРИНГА ПОДВОДНОЙ ОБСТАНОВКИ В МОРСКОМ РАЙОНЕ | 2023 |
|
RU2797206C1 |
| РАДИОБУЙ ПОДВОДНОГО ПЛАВСРЕДСТВА ПОДЛЕДНЫЙ | 2018 |
|
RU2690788C1 |
| СИСТЕМА ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2659314C2 |
| КОНТРОЛИРУЕМЫЙ МОБИЛЬНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК | 2021 |
|
RU2766365C1 |
Изобретение относится к области морской техники и может быть использовано для поиска морских объектов. Предложен поисковый подводный аппарат, несущий в качестве полезной нагрузки буи, оборудованные телескопическим поплавком с устройством для плавления льда и выдвижной антенной, оснащенный бортовой системой управления, связи и навигации, источником энергии, двигателем, движителем, приводами рулевых машинок и наружным оперением с рулями, имеющий устройство отделения буев и приемоизлучающее устройство для определения толщины льда. Дополнительно поисковый подводный аппарат оснащен акустическим модемом и плавучим якорем с устройством его постановки, буи являются радиогидроакустическими и дополнительно оборудованы акустическим модемом. Предложен также способ применения поискового подводного аппарата. Технический результат заключается в улучшении эксплуатационных характеристик поискового подводного аппарата. 2 н.п. ф-лы, 2 ил.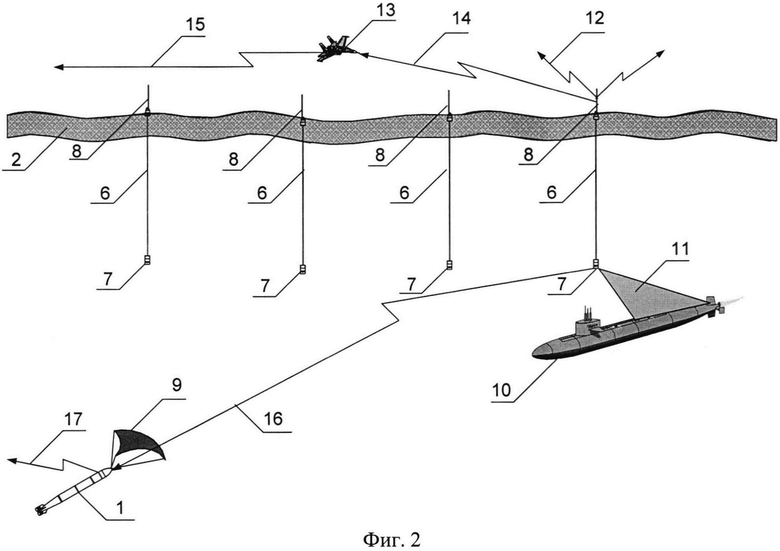
1. Поисковый подводный аппарат, несущий в качестве полезной нагрузки буи, оборудованные телескопическим поплавком с устройством для плавления льда и выдвижной антенной, оснащенный бортовой системой управления, связи и навигации, источником энергии, двигателем, движителем, приводами рулевых машинок и наружным оперением с рулями, имеющий устройство отделения буев и приемоизлучающее устройство для определения толщины льда, отличающийся тем, что дополнительно подводный аппарат оснащается акустическим модемом и плавучим якорем с устройством его постановки, буи являются радиогидроакустическими и дополнительно оборудуются акустическим модемом.
2. Способ применения поискового подводного аппарата, включающий приготовление подводного аппарата к пуску, в ходе которого проверяют работоспособность его бортовой системы управления, вводят в нее программу и маршрут движения, производят пуск подводного аппарата с носителя и движение его по заданному маршруту в расчетную или заданную точку, осуществляют подвсплытие подводного аппарата на заданную глубину, где производят поиск льда с допустимой толщиной, отделяют первый буй, выполняют движение подводного аппарата в следующую точку, обследуют толщину льда и выпускают второй буй, повторяют эту операцию до израсходования всех буев, после выпуска буя с подводного аппарата производят его всплытие и приледнение к нижней кромке льда, с помощью устройства для плавления льда подают к месту контакта со льдом морскую воду и реагирующий с ней химический состав, запускают экзотермическую реакцию, расплавляют во льду отверстие и выдвигают через него на поверхность антенну, отличающийся тем, что для поиска подводных объектов используют радиогидроакустические буи, после приледнения буя отделяют его нижнюю часть с расположенными в ней гидрофонами и акустическим модемом, разматывают кабель, заглубляют ее на установленную глубину поиска и начинают поиск подводных объектов, после выпуска всех буев укладывают подводный аппарат на грунт или в дрейф или на плавучий якорь и используют его в качестве подводного ретранслятора для передачи информации от акустического модема буя на командный пункт, обнаруживают гидрофоном буя подводный объект и передают об этом информацию на командный пункт по линии радиосвязи и/или по линии звукоподводной связи.
| Статья "В.А.Катенин, А.В.Катенин | |||
| Минная угроза и навигационно-гидрографическое обеспечение противоминных действий", опублик | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2578807C2 |
| JP H10111352 A, 28.04.1998 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА НАД МОРСКОЙ АКВАТОРИЕЙ С ПОДВОДНОГО ПЛАВСРЕДСТВА | 2001 |
|
RU2210087C1 |
| US 5119341 A, 02.06.1992. | |||

