Изобретение относится к области устройств наблюдения, предназначенных для обнаружения надводных и подводных целей, при решении задач охраны протяженных морских участков, способных автономно эксплуатироваться длительное время, за счет возможности пополнять электроэнергию в процессе эксплуатации.
Устройство представляет собой подводный аппарат с переменной плавучестью - глайдер, оснащенный бортовыми системами управления, гидроакустическими системами обнаружения, в том числе с гибкой протяженной буксируемой антенной, системой звукоподводной связи и генерации электроэнергии.
Протяженность морской границы России составляют около сорока тысяч километров. Водный рубеж расположен на расстоянии 12 морских миль от побережья и еще на 200 морских миль располагается российская экономическая зона. Морские границы России располагаются в акваториях трех океанов. Ближайшими соседями России считаются Япония и США, поскольку эти страны отделяются от нее узкими проливами. Соединенные Штаты Америки и РФ разделяет Берингов пролив, расположенный между российским о. Ратманова и американским о. Крузенштерна. Граница с Японией находится между Сахалином, Южными Курильскими островами с нашей стороны и островом Хоккайдо со стороны Японии. Главный океанический сосед - Канада. Морские границы России и Канады разделяются Северным ледовитым океаном. Это самая длинная пограничная черта, проходящая по Чукотскому, Восточно-Сибирскому, Карскому, Баренцеву морям, а также по морю Лаптевых. По международным соглашениям, в близлежащем океане России принадлежат все внутренние воды, такие как Белое море, Чешская и Печорская губа, территориальные водоемы вдоль берега всех морей (протяженностью шестнадцать морских миль), а также двести миль экономической зоны далее территориальных, а это свыше 4 миллионов квадратных километров. Морские границы России составляют по временной протяженности десять часовых поясов с запада на восток. Протяженность морских границ России такова, что требует грамотно организованной охраны и огромного количества ресурсов, технических и человеческих в том числе.
Использованием только плавсредств невозможно обеспечить охрану морской границы России, для эффективного контроля необходимо комплексное применение, как корабельного состава, так и авиации, в том числе и беспилотной, стационарных и подвижных постов наблюдения и различных других технических средств. Для обеспечения непрерывного контроля за надводной и подводной обстановкой необходимо оснащение пограничных органов современными средствами вооружения, военной и специальной техникой.
Для непрерывного контроля за обстановкой на морском участке границы используются стационарные пассивные гидроакустические комплексы, способные обнаруживать по гидроакустическому полю подводные и надводные объекты, вести гидроакустическое наблюдение за обнаруженными надводными и подводными объектами с определением курса, скорости и модели их поведения, автоматизированной классификацией объектов по их шумоизлучению.
Эффективными средствами наблюдения за надводной и подводной обстановкой выступают специальные подводные роботы, которые обнаруживают любые движущиеся объекты и определют их координаты. Беспилотные подводные роботы могут самостоятельно охранять морские границы России, контролировать заданную акваторию и передавать на берег информацию.
Известно устройство освещения подводной обстановки (Патент RU №2735447 от 2020 г), представляющее собой подводный аппарат с переменной плавучестью - глайдер, оснащенный бортовыми системами управления, курсоуказания и обнаружения цели с гибкой протяженной буксируемой антенной, на корпусе глайдера устанавливается узел крепления, к которому крепится радиобуй, имеющий источник тока, запоминающее устройство, связанное с бортовой системой управления глайдера, аэростат, к которому крепится кабель-трос и антенна, устройство запуска аэростата, включающее газогенератор или баллон со сжатым газом, редуктор и самовскрывающийся клапан.
Недостатками этого устройства является малая автономность устройства, ограниченная возможностями системы энергообеспечения движения и использования средств обнаружения и управления, а также отсутствие возможности использования в зимнее время при ледовой обстановке.
Известен также способ освещения подводной обстановки (Патент RU №2578807 от 2016 г), при котором производят поиск подводных объектов с применением самоходного автономного необитаемого подводного аппарата, оснащенного системой обнаружения цели при движении по заданному маршруту, который устанавливают в его бортовую систему управления перед пуском, обнаруживают подводный объект системой обнаружения цели, передают информацию о цели на пункт управления по действующей линии связи, классифицируют обнаруженную цель, контролируют на пункте управления точность удержания места необитаемого подводного аппарата на заданном маршруте по времени его движения под управлением инерциальной навигационной системы и в случае ее уменьшения ниже допустимой выстреливают в район действия реактивный РГБ, с помощью которого уточняют географическое положение необитаемого подводного аппарата и обнаруженных им подводных объектов.
Недостатком этого способа освещения подводной обстановки, основанного на применении самоходного автономного необитаемого подводного аппарата, является малая автономность ограниченная возможностями системы энергообеспечения средств движения и сопровождающих работу его двигательно-движительной установки, использования бортовой ГАС в активном режиме или средств звукоподводной связи.
Наиболее близкой по технической сущности к заявленному изобретению является способ и устройство освещения подводной обстановки (Патент RU №2655592 от 2018 г), при котором производят поиск подводных объектов автономным необитаемым подводным аппаратом, оснащенным системой обнаружения цели при его движении по заданному маршруту, для чего устанавливают маршрут в бортовую систему управления перед пуском, обнаруживают подводный объект, передают информацию о цели на пункт управления по действующей линии связи, классифицируют обнаруженную цель, контролируют на пункте управления точность удержания места необитаемого подводного аппарата на заданном маршруте, применяют подводный аппарат с переменной плавучестью, на корпусе которого закрепляют не менее одного радиобуя, оснащают его гибкой протяженной буксируемой антенной для поиска подводных объектов, радиобуй оснащают устройством для плавления льда, с обнаружением подводной цели и ее распознаванием записывают данные о ней на запоминающее устройство радиобуя, устройством для определения толщины льда обследуют толщину ледового покрова, в месте, где толщина льда соответствует заданной, отделяют радиобуй от корпуса аппарата и под действием его положительной плавучести обеспечивают всплытие радиобуя и его приледнение к нижней кромке льда, где с помощью устройства для плавления льда проплавляют во льду отверстие, в которое выдвигают антенну и поднимают на поверхность для организации связи со спутником или летательным аппаратом.
Недостатком этого устройства является сложность конструкции, необходимость наличия на борту необитаемого подводного аппарата больших запасов электроэнергии, необходимой как для осуществления движения аппарата по заданному маршруту, так и работы всех технических средств: гидроакустической станции и средств распознавания целей, автоматики и устройства плавления льда, средств радиосвязи.
Задачей изобретения является создание устройства, способного длительное время автономно осуществлять контроль подводной и надводной обстановки на заданном морском (речном) участке, используя для своего перемещения в водной среде изменения остаточной плавучести, осуществлять обнаружение в различных режимах, классифицировать объекты и передавать эту информацию на пункт управления по звукоподводной связи. Обеспечивать большую автономность работы за счет восполнения запасов электроэнергии в процессе эксплуатации.
Требуемый технический результат достигается тем, что автономное устройство обнаружения нарушителей на морском участке границы, представляющее собой подводный аппарат-глайдер с переменной плавучестью, перемещение глайдера в водной среде по глубине осуществляется за счет изменения остаточной плавучести. Для этого вместо силовой установки с гребным винтом глайдер оснащен системой автоматического управления плавучестью, которая формирует управляющие воздействия в виде изменения величины и знака остаточной плавучести глайдера. Исполнительный тракт состоит из балластной цистерны, размещенной во внутреннем прочном корпусе глайдера, и эластомерной емкости в проницаемой части внутреннего корпуса, распределительных электромагнитных клапанов, гидронасоса рабочей жидкости (обычно минеральное масло). В устройство при подготовке к эксплуатации закладывается маршрут патрулирования. Для осуществления контроля на морском участке границы и обнаружении нарушителей устройство оснащается гибкой протяженной буксируемой антенной для гидроакустического поиска в пассивном режиме и гидроакустической станцией в носовой части с возможностью активного поиска, а также обеспечения звукоподводной связи. Автономное устройство обнаружения нарушителей на морском участке границы состоит из внешнего и внутреннего корпусов, причем внутренний выступает на треть из внешнего, а внешний имеет большее сечение. В выступающей носовой части внутреннего корпуса располагается гидроакустическая станция и проницаемая часть с эластомерной емкостью. В средней части расположено крыло из двух шарнирно прикрепленных к корпусу консолей, установленных на оси вращения, проходящей за центром давления крыла с возможностью саморегуляции угла атаки крыла в зависимости от скорости и направления набегающего потока. В кормовой части, в межкорпусном пространстве вокруг внутреннего корпуса установлена крыльчатка на валу гидрогенератора, расположенного во внутреннем корпусе. Гидрогенератор совместно с аккумуляторной батареей обеспечивают генерацию, хранение и обеспечение электроэнергией средств обнаружения и распознавания, управления движением и связи. Водный поток истекает из кормовой части автономного устройства обнаружения нарушителей на морском участке границы через систему разносторонне направленных водоводов с электромагнитными клапанами.
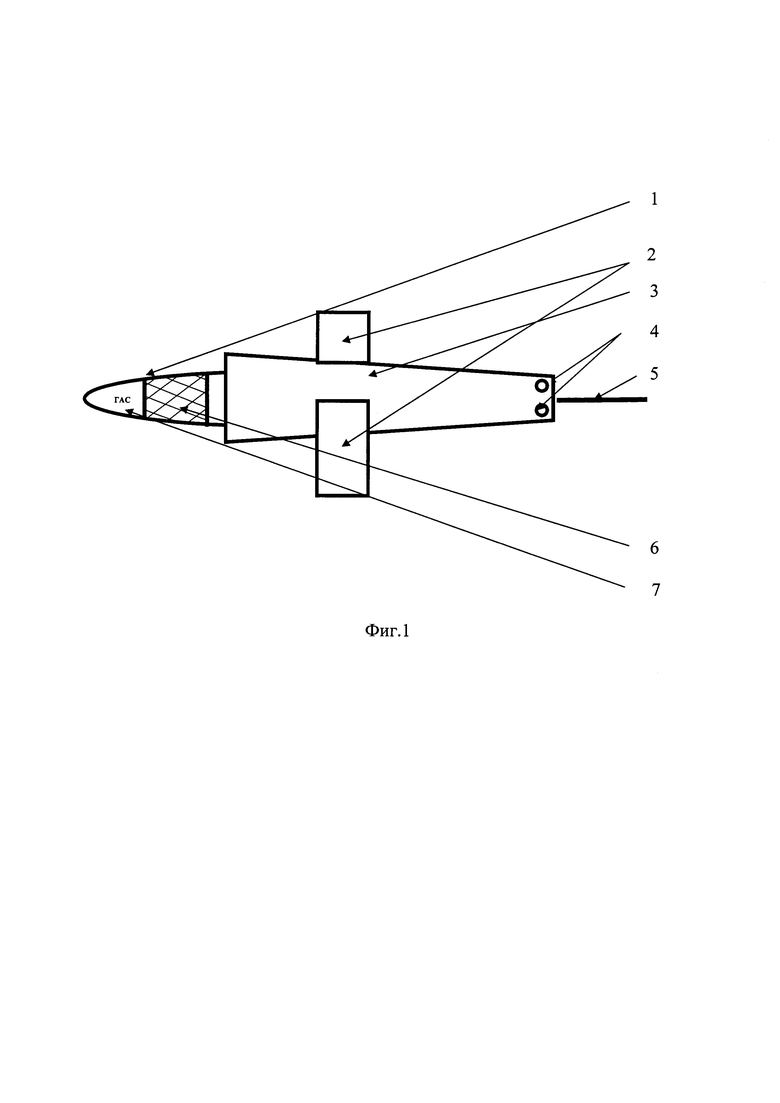
Сущность изобретения поясняется чертежом, где на Фиг. 1 представлено, автономное устройство обнаружения нарушителей на морском участке границы, состоящее из:
1. - внутренний корпус устройства;
2. -крыло;
3. - внешний корпус устройства;
4. - система разносторонне направленных водоводов;
5. - гибкая протяженная буксируемая антенна;
6. - проницаемая часть с эластомерной емкостью;
7. - гидроакустическая станция.
Изобретение работает следующим образом: перемещение подводного аппарата-глайдера в водной среде по глубине осуществляется за счет изменения остаточной плавучести. Для этого он оснащается системой автоматического управления плавучестью, которая формирует управляющие воздействия в виде изменения величины и знака остаточной плавучести глайдера. Исполнительный тракт системы автоматического управления плавучестью состоит из балластной цистерны, размещенной во внутреннем корпусе устройства (1), и эластомерной емкости в проницаемой части (6) внутреннего корпуса, распределительных электромагнитных клапанов, гидронасоса рабочей жидкости (обычно минеральное масло). При постоянном массовом водоизмещении объемное водоизмещение аппарата может управляемо меняться при откачке рабочей жидкости из балластной цистерны в эластичную емкость или, наоборот, подаче жидкости из емкости в цистерну, приводя к изменению плавучести. При спуске на воду автономное устройство обнаружения нарушителей на морском участке границы постепенно погружается по пологой наклонной траектории. Затем он всплывает по восходящей к поверхности траектории и далее цикл повторяется. Для увеличения пологой траектории перемещения устройства под водой оно снабжено крылом (2), состоящим из двух шарнирно прикрепленных к корпусу консолей, установленных на оси вращения, проходящей за центром давления крыла с возможностью саморегуляции угла атаки крыла в зависимости от скорости и направления набегающего потока.
Управление по курсу устройства осуществляют за счет системы разносторонне направленных водоводов (4) с электромагнитными клапанами. Открытие или закрытие различных групп водоводов позволяет осуществлять изменение направления движения устройства.
Обнаружение морских целей автономным устройством обнаружения нарушителей на морском участке производится с помощью гибкой протяженной буксируемой антенны (5) и гидроакустической станции (7).
Применение гибкой протяженной буксируемой антенны (5) позволяет вести постоянный поиск в пассивном режиме обнаружения. При обнаружении, с помощью вычислительных средств устройства и заранее заложенных гидроакустических образов, производится классификация вида обнаруженного объекта и осуществляется передача информации об обнаружении по каналам звукоподводной связи гидроакустической станции (7) на пункт управления. При необходимости более точного определения места, параметров движения и вида нарушителя применяется гидроакустическая станция (7) в том числе и в активном режиме. Происходит так же гидроакустическое подсвечивание цели для более точного определения ее характеристик.
Снабжение всех энергопотребляющих систем автономного устройства обнаружения нарушителей на морском участке осуществляется электроэнергией от аккумуляторной батареи и гидрогенератора, расположенного во внутреннем корпусе. При движении устройства водный поток, обтекающий внутренний корпус (1), захватывается внешним корпусом (3) и далее поступает в межкорпусное пространство. На валу гидрогенератора, по периметру корпуса, и заполняя все межкорпусное пространство, установлена крыльчатка с расположенными под углом лопастями. Набегающий водный поток вращает крыльчатку, и гидрогенератор вырабатывает электроэнергию, поступающую потребителям и накапливаемую на аккумуляторной батареи. Сопротивление, создаваемое лопастями крыльчатки, дополнительно увеличивает пологую траекторию движения устройства. Далее водный поток поступает в систему разносторонне направленных водоводов (4) с электромагнитными клапанами и истекает из устройства.
Автономное устройство обнаружения нарушителей на морском участке границы позволит длительное время автономно осуществлять контроль за подводной и надводной обстановкой на заданном морском (речном) участке границы.
Изобретение относится к области устройств наблюдения, предназначенных для обнаружения надводных и подводных целей, при решении задач охраны протяженных морских участков, способных автономно эксплуатироваться длительное время, за счет возможности пополнять электроэнергию в процессе эксплуатации. Автономное устройство обнаружения нарушителей на морском участке границы представляет собой подводный аппарат-глайдер с переменной плавучестью, движущийся по заранее заданному маршруту за счет изменения своей плавучести, оснащенный гибкой протяженной буксируемой антенной для поиска подводных объектов, и состоит из внешнего и внутреннего корпусов. Внутренний выступает на треть из внешнего большего в сечении корпуса, в выступающей носовой части внутреннего корпуса располагается гидроакустическая станция и проницаемая часть с эластомерной емкостью. В средней части расположено крыло из двух шарнирно прикрепленных к корпусу консолей, установленных на оси вращения, проходящей за центром давления крыла с возможностью саморегуляции угла атаки крыла в зависимости от скорости и направления набегающего потока. В кормовой части в межкорпусном пространстве вокруг внешнего корпуса установлена крыльчатка на валу гидрогенератора, расположенного во внутреннем корпусе, соединенного с аккумуляторной батареей. Водный поток истекает из устройства в кормовой части через систему разносторонне направленных водоводов с электромагнитными клапанами. Достигается увеличение времени автономно осуществлять контроль за подводной и надводной обстановкой на заданном морском или речном участке границы. 1 ил.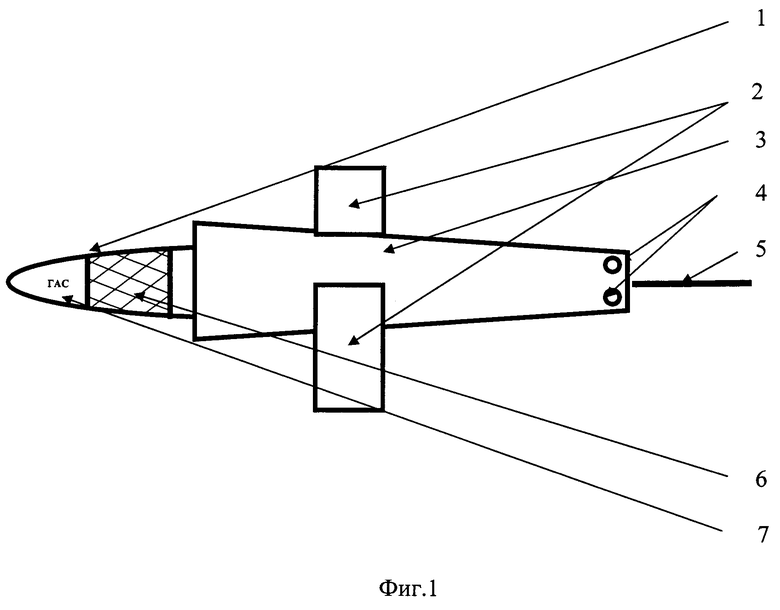
Автономное устройство обнаружения нарушителей на морском участке границы, представляющее собой подводный аппарат-глайдер с переменной плавучестью, движущийся по заранее заданному маршруту за счет изменения своей плавучести, оснащенный гибкой протяженной буксируемой антенной для поиска подводных объектов, отличающееся тем, что состоит из внешнего и внутреннего корпусов, внутренний выступает на треть из внешнего большего в сечении корпуса, в выступающей носовой части внутреннего корпуса располагается гидроакустическая станция и проницаемая часть с эластомерной емкостью, в средней части расположено крыло из двух шарнирно прикрепленных к корпусу консолей, установленных на оси вращения, проходящей за центром давления крыла с возможностью саморегуляции угла атаки крыла в зависимости от скорости и направления набегающего потока, в кормовой части в межкорпусном пространстве вокруг внешнего корпуса установлена крыльчатка на валу гидрогенератора, расположенного во внутреннем корпусе, соединенного с аккумуляторной батареей, обеспечивающей электропитание средств обнаружения и распознавания, управления движением и связи, водный поток истекает из устройства в кормовой части через систему разносторонне направленных водоводов с электромагнитными клапанами.
| СПОСОБ И УСТРОЙСТВО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2017 |
|
RU2655592C1 |
| US 5119341 A1, 02.06.1992 | |||
| ПОДВОДНЫЙ ПЛАНЕР (ВАРИАНТЫ) | 2012 |
|
RU2490164C1 |
| Необитаемый подводный аппарат для глубоководных погружений | 2020 |
|
RU2733190C1 |

