Изобретение относится к области военной техники и может быть реализовано в виде программы для электронных вычислительных машин (ЭВМ) автоматизированной системы управления (АСУ) войсками для определения районов радиоконтроля (РРК), в которых должны обеспечиваться наилучшие условия функционирования рационально расположенных мобильных радиоприемных комплексов (МРПК) и определения оптимальных маршрутов перемещения МРПК в выбранном РРК или при смене РРК.
В качестве прототипа, используемого при разработке изобретения, для определения РРК принят патент на изобретение «Способ оценки местности» (патент RU №2600096, МПК G06F 19/00, МПК H04W 40/20 от 16.12.2014 г.).
При перемещении МРПК в назначенный район своевременность прибытия комплекса достигается выбором оптимального маршрута перемещения, который должен быть оптимизирован по кратчайшему пути перемещения за минимально возможное время с учетом тактико-технических характеристик МРПК, ориентированных на выполнение требований по сохранению максимально возможных характеристик радиоконтроля при передислокации и перенацеливании.
В настоящее время известны способы определения оптимальных маршрутов перемещения мобильных объектов на местности, основанные на анализе информации о способах перемещения по местности с использованием ЦКМ и других источников.
Например, известен способ прокладки маршрута для разнотипных транспортных комплексов с различной проходимостью участков с использованием геоинформационных технологий и ЦКМ (патент RU №2045773, МПК G06F 17/16 от 19.10.1995 г.), где в качестве основного критерия выбора оптимального маршрута является экономия горюче-смазочных материалов. Недостатком данного способа является то, что выбранный критерий качества для определения оптимального маршрута не учитывает географический характер местности.
Известен способ прокладывания оптимального маршрута движения мобильных объектов по пересеченной местности [Дорогов А.Ю., Лесных В.Ю., Раков В.И., Титов Г.С. Алгоритмы оптимального движения мобильных объектов по пересеченной местности и транспортной сети / Санкт-Петербургский государственный электротехнический университет, выпуск №3, 2006 г.], решающий задачу нахождения оптимальных путей по уровню транспортных затрат для ряда технических приложений: оценка транспортной доступности территориально-распределенных систем охраны, планирование оптимальных маршрутов движения робототехнических систем на пересеченной местности, моделирование прокладки маршрутов в тренажерах мобильных систем и компьютерных играх. Основным недостатком данного способа является то, что он не позволяет произвести предварительную фильтрацию по определенным признакам исходных данных до начала процесса выбора и построения оптимальных маршрутов перемещения и, тем самым, сократить размер выборки, подлежащей обработке, на ЭВМ, что требует применения мощных ресурсоемких программно-вычислительных систем и приводит к увеличению времени обработки информации.
Известен способ выбора траектории движения мобильного объекта в конфликтной среде [А.В. Добровидов, Е.Л. Кулида, И.М. Рудько. Выбор траектории движения объекта в конфликтной среде / М. Проблемы управления, выпуск №3, 2011 г.]. В данном способе рассматривается задача определения качества скрытного маневрирования объекта при прохождении им маршрута из заданной начальной точки в заданную конечную точку в некотором регионе, в котором объект сталкивается с противодействием ряда наблюдателей, осуществляющих поиск и обнаружение объекта. Критериями выбора оптимальной траектории движения мобильного объекта являются минимальное время прохождения траектории и вероятность его необнаружения на всей траектории движения ни одним из наблюдателей. Недостатком данного способа является то, что перемещение мобильного объекта осуществляется в анизотропной среде.
Констатируется, что наиболее близким по своей сущности к заявляемому изобретению является способ прокладывания маршрута передвижения на пересеченной местности (патент RU №2439, МПК G01C 21/34 от 15.07.2010 г.), в котором оптимальный маршрут движения определялся исходя из оценки географических свойств местности на основании критерия проходимости без предварительной оценки эффективности применения мобильных комплексов в конечной точке маршрута, что является существенным недостатком при принятии решения на применение мобильных комплексов по предназначению.
Задача определения оптимального маршрута перемещения в общей постановке формулируется следующим образом [6]. На карте местности необходимо определить маршрут движения от стартового множества точек к множеству конечных точек, обладающий минимальными затратами.
Сущность изобретения заключается в предварительном анализе, изучении и оценке района местности, предназначенной для развертывания МРПК, методом оптимизации, например методом динамического программирования с использованием аддитивного критерия качества (целевой функции) [1, 13, 14], при этом в качестве составляющих критерия вводят, например, математические, информационные либо геометрические примитивы, характеризующие, например, непригодность зон для размещения МРПК и исключение этих зон из расчета, с последующим определением оптимального маршрута перемещения МРПК от пункта дислокации до выбранных приемных позиций на основании условий проходимости маршрута движения, тактико-технических характеристик перемещаемых МРПК и определенных критериев оптимальности (минимальное затраченное время на перемещение, кратчайший по длине путь, минимальные энергетические затраты, защитные и маскирующие свойства местности и т.д.). В качестве инструмента для выбора оптимального маршрута перемещения предлагается использовать алгоритм Дейкстры [4, 5]. Применение данного алгоритма обусловлено тем, что данный алгоритм находит в множестве исходных маршрутов движения, представленных в виде графа, единственный наилучший путь, обладающий требуемыми оптимальными свойствами. Для решения данной задачи возможно применение алгоритма Флойда, алгоритма поиска в ширину, алгоритма Форда-Беллмана. Однако, в отличие от алгоритма поиска в ширину, алгоритм Дейкстры работает только с дугами графа, вес которых равен единице. Алгоритм Форда-Беллмана работает с дугами, имеющими отрицательный вес. В нашем случае вес дуг не может быть отрицательным, т.к. учитываемые в методике затраченное время на перемещение, длина пути, энергетические затраты не могут быть отрицательными. Алгоритм Флойда требует большого количества времени и информационных ресурсов для проведения вычислительных операций.
На первоначальном этапе определения РРК, с целью выбора наиболее оптимальных позиций пригодных к развертыванию МРПК, путем оптимизации минимизируют географическую зону возможного размещения, с учетом исключения составляющих административного и физико-географического (и другого) характера, формируя возможные районы размещения на цифровой карте местности (ЦКМ). Минимизация приводит к снижению объема информации (без потери качества), что сокращает размер выборки, подлежащей обработке на ЭВМ и, как следствие, снижает требования к аппаратным ресурсам, что позволяет, например, использовать малогабаритные мобильные компьютерные средства.
На следующем этапе проводят структурирование и прогнозную оценку минимизированной рабочей зоны с целью возможного выбора определенных типов МРПК, которые могут быть наиболее эффективно размещены и применены в данной географической зоне для выполнения задач радиоконтроля, для чего вводят оперативно-тактические условия функционирования и параметры, ограничивающие применение и размещение выбранных МРПК в данном РРК. Далее для выбранных МРПК оценивается уровень электромагнитной доступности (ЭМД) источников радиоизлучений (ИРИ) с целью определения и адаптации оптимальных приемных позиций для выполнения задач радиоконтроля в данной географической зоне.
В качестве инструментария для определения уровня ЭМД ИРИ используется алгоритм расчета мощности сигнала на входе приемника [7]. Эти расчеты базируются на вычислении потерь сигнала на трассе распространения радиоволн (РРВ) от ИРИ до МРПК, в соответствии с методами расчета затухания сигнала и/или напряженности поля на трассе РРВ в соответствии с рекомендациями международного союза электросвязи (МСЭ) [Рекомендация МСЭ-R Р.525-2, Рекомендация МСЭ-R Р.526-13, Рекомендация МСЭ-R Р.452-15, Рекомендация МСЭ-R Р.1546-5].
В соответствии с задачами радиоконтроля и выбранными МРПК методика расчета потерь [7] на трассе РРВ учитывает: особенности распространения радиоволн в различных диапазонах частот; тип трассы РРВ (сухопутная, морская, смешанная); особенности подстилающей поверхности на трассе РРВ (сухая почва, луг, лес, море); рельеф местности.
Итогом прогнозной оценки минимизированной рабочей зоны являются участки местности на ЦКМ оптимизированные для РК соответствующими МРПК по ЭМД ИРИ.
На следующем этапе оценивается возможность адаптации применения МРПК в спрогнозированном РРК с целью повышения уровня ЭМД ИРИ, и в случае возможности повышения ЭМД проводится адаптация и уточнение позиций пригодных для размещения МРПК.
Маршруты перемещения МРПК при изменении приемных позиций РРК представляются в виде ориентированного взвешенного графа, вершины которого представляют некоторые контрольные точки пути, при этом построение графа определяется исходными данными (тактико-техническими характеристиками МРПК, временем года, климатическими и погодными условиями, временем суток), ограничениями (административного характера (закрытые для перемещения по каким-либо соображениям участки пути и т.д.), наличием энергетических ресурсов, средней скоростью движения, ограничениями по проходимости участков пути (наличием и состоянием мостов, состоянием имеющихся дорог, наличием завалов, крупных рек и озер на пути движения и т.д.), в зависимости от защитных и маскирующих свойств местности и других), критериями оптимизации (минимально затраченное время на перемещение, кратчайший по длине путь, минимальные энергетические затраты и т.д.) и осуществляется в соответствии с методикой прокладывания маршрута передвижения на пересеченной местности [15].
Выбор оптимального маршрута перемещения МРПК в РРК определяется алгоритмом Дейкстры. Результирующий оптимальный маршрут перемещения МРПК в РРК отображается на ЦКМ в виде линии с указанием координат приемных позиций МРПК и технических характеристик передвижения (длины пути, временных и энергетических затрат на перемещение МРПК и других).
При смене района радиоконтроля и необходимости перемещения МРПК в другой географический район представленный другими ЦКМ алгоритм определения нового РРК и алгоритм перемещения МРПК в этот район проводится аналогично методикам приведенным выше.
Техническим результатом предлагаемого изобретения является усовершенствованный способ определения районов радиоконтроля, включающий:
- методику выбора районов развертывания МРПК, основанную на способе оценки местности;
- методику перемещения МРПК, при адаптации их по уровню ЭМД ИРИ, внутри выбранного РРК;
- методику перемещения МРПК в новый географический район в случае их перенацеливания.
Учитывающий при этом:
- концепцию интегрирования геоинформационных систем и новых информационных технологий;
- оперативно-тактические условия функционирования и тактико-технические характеристики МРПК, предназначенных для размещения в выбранном районе;
- тактические свойства местности в сочетании с сезонными климатическими и погодными условиями;
- оценку возможностей по применению МРПК в минимизированном по географическим примитивам районе местности и оптимизированном РРК по уровню ЭМД ИРИ;
- определение оптимального маршрута перемещения при адаптации МРПК внутри РРК;
- определение оптимального маршрута перемещения МРПК в неоцененный район при перенацеливании с последующей его минимизацией и оптимизацией в соответствии с методикой выбора районов развертывания;
- затраченное время на перемещение МРПК, длину пути, энергетические затраты и т.д.
Достигаемым техническим результатом изобретения является снижение времени расчета, затрачиваемое на выбор районов развертывания, и снижение времени, затрачиваемое на определение оптимального маршрута перемещении МРПК в выбранный район развертывания или в другой географический район при перенацеливании, должностными лицами, принимающими решения, путем снижения субъективных факторов и ошибок, за счет уменьшения объема анализируемых данных в условиях априорной неопределенности на основе использования информационных технологий.
Целью настоящего изобретения является усовершенствованный способ определения РРК, позволяющий снизить время, затрачиваемое на выбор РРК, оптимизации процесса адаптации МРПК в РРК по уровню ЭМД и оптимизации процесса определения оптимального маршрута перемещения МРПК при адаптации внутри выбранного РРК или перемещение в новый географический район в случае перенацеливания МРПК.
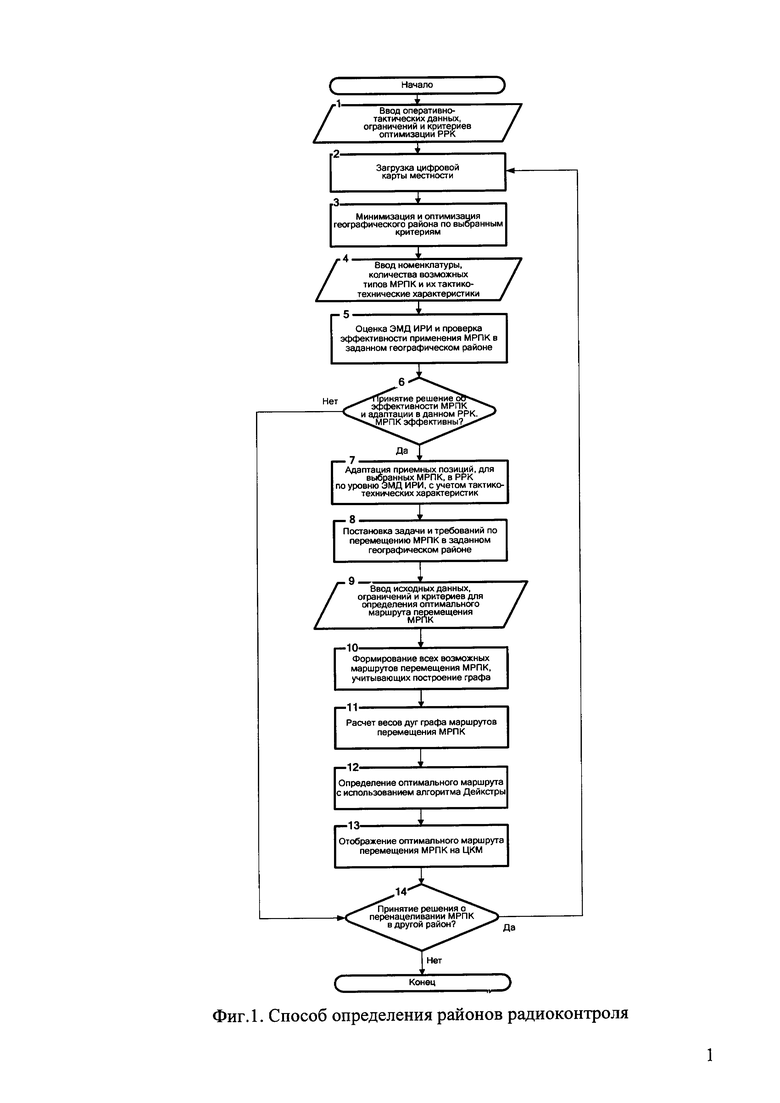
Решение цели реализовано в виде методики, представленной блок-схемой алгоритма на фиг. 1.
На этапе 1 вводятся оперативно-тактические данные по заданному географическому РРК, которые включают исходные данные по площади (сектору, зоне) оцениваемого района, времени суток (ночь, утро, вечер или день для весенне-осеннего или летнего времени), характеристики времени года (зима, весна-осень, лето), возможности прямой видимости и другие, в зависимости от поставленных задач, задаются ограничения и определяются частные и обобщенный критерии для минимизации и оптимизации определенного географического района с целью исключения из этого района зон, непригодных для размещения радиоприемных комплексов, например, по административным, географическим или физическим (или другим) параметрам (признакам), определяется инструментальное средство (комплекс) для реализации способа оценки размещения на местности в условиях заданного географического района с учетом принятых критериев и ограничений с привлечением ГИС, ГЛО-НАСС, ЦКМ и других современных технологий.
На этапе 2 производится загрузка цифровой карты местности для географической зоны определенной на этапе 1.
На этапе 3 путем оптимизации по частным критериям и обобщенному критерию производится минимизация географической зоны возможного размещения МРПК, с учетом исключения составляющих административного и физико-географического (и другого) характера, формируя возможные районы размещения МРПК на ЦКМ.
Далее после минимизации и оптимизации географических зон на ЦКМ по географическим критериям определяют номенклатуру (перечень) радиоприемных комплексов, которые могут быть использованы в данной географической зоне для выполнения задач радиоконтроля с последующей оценкой их эффективности по уровню ЭМД ИРИ.
Для этого на этапе 4 вводится номенклатура возможных типов МРПК, количество предполагаемых к применению МРПК, тактико-технические характеристики выбранных МРПК, которые учитывают требования, предъявляемые к размещению МРПК, и влияют на условия применения МРПК по предназначению в определенном на 1 этапе РРК.
На этапе 5 проводится расчет и оценка ЭМД ИРИ заданного географического района в соответствии с рекомендациями: МСЭ-R Р.525-2, МСЭ-R Р.526-13, МСЭ-R Р.452-15, МСЭ-R Р.1546-5. Затем проводится проверка эффективности применения МРПК в заданной географической зоне, путем сравнения возможностей, по применению выбранных МРПК, по уровню ЭМД ИРИ с расчетными данными и на этапе 6 принимается решение об эффективности применения МРПК и адаптации по уровню ЭМД ИРИ в данном РРК. В случае необходимости и возможности применения МРПК в РРК переходят к этапу 7, где проводится адаптация приемных позиций, наиболее подходящих для применения МРПК в РРК по уровню ЭМД ИРИ, с учетом их тактико-технических характеристик, включающих требования по размещению. Если принимается решение о неэффективности применения МРПК в данном географическом районе, то переходят к этапу 14, где принимается решение о перенацеливании МРПК в другой географический район.
На этапе 8 проводится постановка задачи на перемещение МРПК, на ЦКМ отмечаются исходные и конечные пункты перемещения, определяются требования по перемещению МРПК (к какому времени прибыть в конечные пункты, с какой средней скоростью совершить перемещение и т.д.) в заданный географический район.
На этапе 9 вводятся исходные данные (время года, климатические и погодные условия, время суток), определяются ограничения (административного характера (закрытые для перемещения по каким-либо соображениям участки пути и т.д.), наличие энергетических ресурсов, средняя скорость движения, ограничения в зависимости от защитных и маскирующих свойств местности и т.д.), на ЦКМ отмечаются непригодные для перемещения участки пути (ветхие и разрушенные мосты; завалы; дороги, крупные реки и озера, преодоление которых невозможно по тем или иным причинам и т.д.), определяются критерии оптимизации маршрутов перемещения (минимально затраченное время на перемещение, кратчайший по длине путь, минимальные энергетические затраты и т.д.).
На этапе 10 формируются все возможные маршруты перемещения МРПК и производится построение графа маршрутов перемещения МРПК в заданном географическом районе.
На этапе 11 производится расчет весов дуг графа маршрутов перемещения МРПК, учитывающих критерии оптимизации (минимально затраченное время на перемещение, кратчайший по длине путь, минимальные энергетические затраты и т.д.).
На этапе 12 производится определение оптимального маршрута перемещения, для выбранных на 4 этапе МРПК, с использованием алгоритма Дейкстры.
На этапе 13 на ЦКМ отображается оптимальный маршрут перемещения МРПК в РРК в виде линии с указанием координат приемных позиций МРПК и технических характеристик передвижения (длины пути, временных и энергетических затрат на перемещение МРПК и других).
На этапе 14 проверяется условие о перенацеливании МРПК в другой географический район. Если в зависимости от тех или иных причин требуется перенацеливание МРПК в другой РРК, то переходят к этапу 2, где производится загрузка нового географического района, с последующей его минимизацией, оптимизацией и определением оптимального маршрута перемещения МРПК во вновь загруженный РРК.
Предлагаемая методика вписывается в современную концепцию управления войсками следующим образом. Существует большая трудоемкость решения задач управления в условиях крайнего дефицита времени, отводимого на планирование операций (боевых действий), резко обостряет глобальную проблему полноты и своевременности обработки информации. С целью перехода на новый качественный уровень необходимо совместное использование современного инструментария (ГИС, ГЛОНАСС, ЦКМ и других) в автоматазированных системах управления военного назначения. Автоматизация процессов управления за счет новых информационных технологий и их использование на системном уровне управления войсками требует разработки и применения специальных технологий оценки обстановки в районах особого предназначения на подготовительном этапе, т.е. в мирное время. Поэтому необходимость решения задачи предварительной оценки географического района для размещения мобильных радиоприемных комплексов с возможностью их оперативного перемещения внутри этого района, либо в другой географический район при перенацеливании, с учетом тактических свойств местности, существует, так как является одной из важнейших задач при планировании и организации мероприятий радиоконтроля [2, 3].
Таким образом, предлагаемый способ определения районов радиоконтроля заключается в выполнении новых операций и новой последовательности их выполнения и обладает рядом существенных преимуществ, которые позволяют минимизировать и структурировать предполагаемый район размещения МРПК, сократить время принятия решения на развертывание и перемещение МРПК как внутри выбранного РРК, так и в новый географический район в случае их перенацеливания, обеспечить высокую степень использования информационных технологий, понизить субъективный фактор принятия решения должностными лицами, повысить эффективность применения МРПК по предназначению.
Таким образом, заявляемое техническое решение соответствует критерию изобретения «новизна».
Источники информации
1. Бэлман Р. Динамическое программирование. М.: Издательство иностранной литературы, 1960. - 400 с.
2. Гитис В. Основы пространственно-временного прогнозирования в геоинформатике. М.: Физматлит, 2004. - 256 с.
3. Рейклейтис Г. Оптимизация в технике. М.: Мир, 1986. - 347 с.
4. Емеличев В.А., Мельников О.И., Сарванов В.И., Тышкевич Р.И. Лекции по теории графов. М.: Наука, 1990. - 384 с.
5. Шапорев С.Д. Математическая логика. Курс лекций и практических занятий. М.: Наука, 2000. - 416 с.
6. Дорогов А.Ю., Лесных В.Ю., Раков В.И., Титов Г.С. Алгоритмы оптимального движения мобильных объектов по пересеченной местности и транспортной сети // СПБГЭУ. - 2006. - №3. - С. 419-427.
7. Калюжный Н.М., Галкин С.А., Коржуков К.Н., Семенов Г.Н., Чернов А.Б. Выбор методов оценивания потерь и разработка программных моделей для оценивания электромагнитной доступности средств радиомониторинга. // Вестник НТУ «ХПИ». - 2015. - №32. - С. 86-96.
8. Добровидов А.В., Кулида Е.Л., Рудько И.М. Выбор траектории движения объекта в конфликтной среде // М.: Проблемы управления. - 2011. - №3. - С. 64-75.
9. Рекомендация МСЭ-R Р.525-2. Расчет ослабления в свободном пространстве. 1994. - 3 с.
10. Рекомендация МСЭ-R Р.526-13. Распространение радиоволн за счет дифракции. 2013. - 37 с.
11. Рекомендация МСЭ-R Р.452-15. Процедура прогнозирования для оценки помех между станциями, находящимися на поверхности Земли, на частотах выше приблизительно 0,1 ГГц. 2013. - 54 с.
12. Рекомендация МСЭ-R Р.1546-5. Метод прогнозирования для трасс связи "пункта с зоной" для наземных служб в диапазоне частот от 30 МГц до 3000 МГц. 2013. - 57 с.
13. Ганиев А.Н., Чеботарь И.В., Серебряков Ю.И. и др. «Способ оценки местности». Патент РФ на изобретение №2600096, 2016. Бюл. №29
14. Ганиев А.Н., Чеботарь И.В., Серебряков Ю.И. и др. Комплексная методика формирования структуры радиотехнических систем и размещения ее в пространстве // Наукоемкие технологии. - М.: Радиотехника. - 2015. - №12. - С. 70-79.
15. Мухин А.И., Шлык A.M., Руднев Н.И. «Способ прокладывания маршрута передвижения на пересеченной местности». Патент РФ на изобретение №2439496, 2012. Бюл. №1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНКИ МЕСТНОСТИ | 2014 |
|
RU2600096C2 |
| СПОСОБ УПРАВЛЕНИЯ РАДИОЭЛЕКТРОННЫМИ СРЕДСТВАМИ КОНТРОЛЯ ОКРУЖАЮЩЕГО ПРОСТРАНСТВА | 2019 |
|
RU2718234C1 |
| СПОСОБ КОНТРОЛЯ ВОЗДУШНОГО ПРОСТРАНСТВА | 2017 |
|
RU2677367C2 |
| Способ прокладывания маршрута движения подвижных объектов по пересеченной местности | 2018 |
|
RU2681667C1 |
| ОДНОПОЗИЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2016 |
|
RU2657237C1 |
| МУЛЬТИПЛИКАТИВНЫЙ РАЗНОСТНО-ОТНОСИТЕЛЬНЫЙ СПОСОБ СТАЦИОНАРНО-МОБИЛЬНОГО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2558637C2 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ ТОПОГЕОДЕЗИЧЕСКОЙ ИНФОРМАЦИИ НА ОСНОВЕ ЦИФРОВЫХ КАРТ МЕСТНОСТИ (ЦКМ) | 2011 |
|
RU2452000C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОБИЛЬНОГО КОМПЛЕКСА НАВИГАЦИИ И ТОПОПРИВЯЗКИ В УСЛОВИЯХ БОЕВОГО ПРИМЕНЕНИЯ | 2010 |
|
RU2436042C1 |
| Способ обработки результатов радиомониторинга | 2017 |
|
RU2659486C1 |
| КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА РАДИОМОНИТОРИНГА | 2011 |
|
RU2459218C1 |
Изобретение относится к навигационному приборостроению и может найти применение в автоматизированных системах управления (АСУ) войсками для определения районов радиоконтроля (РРК), в которых должны обеспечиваться наилучшие условия функционирования рационально расположенных мобильных радиоприемных комплексов (МРПК) и определения оптимальных маршрутов перемещения МРПК в выбранном РРК или при смене РРК. Технический результат – расширение функциональных возможностей на основе усовершенствования способа определения РРК, обеспечивая снижение времени, затрачиваемого на выбор РРК, оптимизацию процесса адаптации МРПК в РРК по уровню ЭМД и процесса определения оптимального маршрута перемещения МРПК при адаптации внутри выбранного РРК или перемещение в новый географический район в случае перенацеливания МРПК. Для этого осуществляют предварительный анализ, изучение и оценку района местности, предназначенной для развертывания МРПК, методом оптимизации, например методом динамического программирования с использованием аддитивного критерия качества (целевой функции), при этом в качестве составляющих критерия вводят математические, информационные либо геометрические примитивы, характеризующие, например, непригодность зон для размещения МРПК и исключение этих зон из расчета, с последующим определением оптимального маршрута перемещения МРПК от пункта дислокации до выбранных приемных позиций на основании условий проходимости маршрута движения, тактико-технических характеристик перемещаемых МРПК и определенных критериев оптимальности (минимальное затраченное время на перемещение, кратчайший по длине путь, минимальные энергетические затраты, защитные и маскирующие свойства местности и т.д.). В качестве инструмента для выбора оптимального маршрута перемещения предлагается использовать алгоритм Дейкстры. При этом используют: - методику выбора районов развертывания МРПК, основанную на способе оценки местности; - методику перемещения МРПК, при адаптации их по уровню ЭМД ИРИ, внутри выбранного РРК; - методику перемещения МРПК в новый географический район в случае их перенацеливания. Учитывают: - концепцию интегрирования геоинформационных систем и новых информационных технологий; - оперативно-тактические условия функционирования и тактико-технические характеристики МРПК, предназначенных для размещения в выбранном районе; - тактические свойства местности в сочетании с сезонными климатическими и погодными условиями; - оценку возможностей по применению МРПК в минимизированном по географическим примитивам районе местности и оптимизированном РРК по уровню ЭМД ИРИ; - определение оптимального маршрута перемещения при адаптации МРПК внутри РРК; - определение оптимального маршрута перемещения МРПК в неоцененный район при перенацеливании с последующей его минимизацией и оптимизацией в соответствии с методикой выбора районов развертывания; - затраченное время на перемещение МРПК, длину пути, энергетические затраты и др. 1 ил.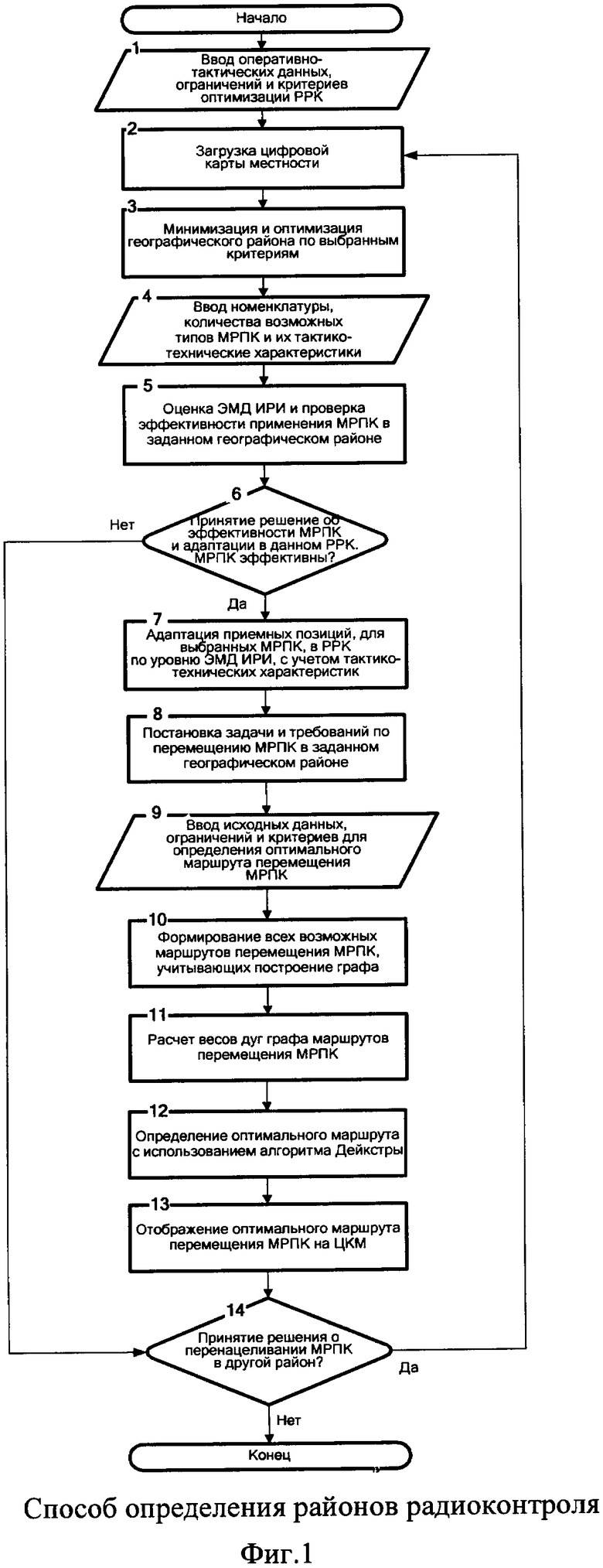
Способ определения районов радиоконтроля, включающий методику выбора районов развертывания мобильных радиоприемных комплексов, основанную на способе оценки местности, и методику перемещения мобильных радиоприемных комплексов между выбранными районами в случае их перенацеливания, отличающийся тем, что первоначальную оценку местности проводят по физико-географическим условиям, зафиксированным на цифровой карте местности (ЦКМ), осуществляют исключение зон, непригодных для размещения радиоприемных комплексов по эксплуатационно-техническим возможностям, присущим размещаемым радиоприемным средствам при выполнении задач управления, проводят оптимизацию ЦКМ с помощью методов динамического программирования по частным и обобщенному критериям района возможного размещения мобильных радиоприемных комплексов на местности, с последующей оценкой возможности применения мобильных радиоприемных комплексов по электромагнитной доступности источников радиоизлучений, передислокацию проводят по маршрутам, оптимизированным по кратчайшему пути перемещения за минимально возможное время с учетом тактико-технических характеристик мобильных радиоприемных комплексов, ориентированных на выполнение требований по сохранению максимально возможных характеристик радиоконтроля при передислокации и перенацеливании.
| СПОСОБ ОЦЕНКИ МЕСТНОСТИ | 2014 |
|
RU2600096C2 |
| УСТРОЙСТВО ВЫБОРА ОПТИМАЛЬНОГО МАРШРУТА МАНЕВРА | 1992 |
|
RU2045773C1 |
| Способ получения щелочного катализатора на основе моносиланолята калия для поликонденсации диалкил-(алкил-арил) циклосилоксанов | 1960 |
|
SU134668A1 |
| WO 2006024298 А1, 09.03.2006 | |||
| Дорогов А.Ю., Лесных В.Ю., Раков В.И., Титов Г.С | |||
| Алгоритмы оптимального движения мобильных объектов по пересеченной местности и транспортной сети // СПБГЭУ | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| - С | |||
| Устройство для биологического очищения сточных вод | 1924 |
|
SU419A1 |
| Состав и структура средств управления удаленным доступом, рис | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Мяльно-трепальный станок для обработки тресты лубовых растений | 1922 |
|
SU200A1 |
| - М.: Солон-Пресс, 2006. | |||

