Изобретение относится к измерительной технике. Оно предназначено для повышения точности оценок параметров динамических моделей.
Известно устройство параметрической идентификации динамических систем, в основе которого лежит фильтр Калмана [1]. Однако синтезированные на его основе алгоритмы на практике достаточно неустойчивы, точность оценок низкая, а сами алгоритмы требуют больших вычислительных затрат [2].
Наиболее близким по технической сущности к заявленному изобретению является устройство идентификации параметров динамических систем на основе вариационных принципов [3], которое отличается от фильтра Калмана минимумом вычислительных затрат и высокой точностью. Однако модель динамики идентифицируемого параметра представлена дифференциальным уравнением первого порядка, что снижает скорость сходимости идентифицируемого параметра к его действительному значению и точность его оценки.
Избавиться от указанных недостатков позволяет устройство оценки параметров с использованием априорной информации в форме интеграла действия.
Цель изобретения - снижение объема вычислительных затрат, увеличение скорости сходимости идентифицируемых параметров к их действительному значению и точности их оценки.
Устройство содержит блоки: блок хранения констант, первый, второй, третий, четвертый, пятый блоки инверсии, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый, одиннадцатый, двенадцатый, тринадцатый, четырнадцатый, пятнадцатый блоки произведения, первый, второй, третий, четвертый, пятый, шестой, седьмой блоки вычитания, блок вычисления синуса числа, первый, второй блоки возведения в степень (-1), первый, второй, третий, четвертый блоки формирования модуля, первый, второй блоки деления.
На фиг. 1 представлены следующие блоки:
1 - блок хранения констант;
2.1 - первый блок инверсии;
2.2 - второй блок инверсии;
2.3 - третий блок инверсии;
2.4 - четвертый блок инверсии;
2.5 - пятый блок инверсии;
3.1 - первый блок произведения;
3.2 - второй блок произведения;
3.3 - третий блок произведения;
3.4 - четвертый блок произведения;
3.5 - пятый блок произведения;
3.6 - шестой блок произведения;
3.7 - седьмой блок произведения;
3.8 - восьмой блок произведения;
3.9 - девятый блок произведения;
3.10 - десятый блок произведения;
3.11 - одиннадцатый блок произведения;
3.12 - двенадцатый блок произведения;
3.13 - тринадцатый блок произведения;
3.14 - четырнадцатый блок произведения;
3.15 - пятнадцатый блок произведения;
4.1 - первый блок вычитания;
4.2 - второй блок вычитания;
4.3 - третий блок вычитания;
4.4 - четвертый блок вычитания;
4.5 - пятый блок вычитания;
4.6 - шестой блок вычитания;
4.7 - седьмой блок вычитания;
5 - блок вычисления синуса числа;
6.1 - первый блок возведения в степень (-1);
6.2 - второй блок возведения в степень (-1);
7.1 - первый блок формирования модуля;
7.2 - второй блок формирования модуля;
7.3 - третий блок формирования модуля;
7.4 - четвертый блок формирования модуля;
8.1 - первый блок деления;
8.2 - второй блок деления.
На фиг. 1 представлено устройство оценки параметров с использованием априорной информации в форме интеграла действия, при этом вход блока 1 является входом устройства, первый выход блока 1 соединен с первым входом блока 3.1, второй выход блока 1 соединен с входом блока 2.1, выход которого соединен со вторым входом блока 3.1, выход которого соединен с первым входом блока 4.1, третий выход блока 1 соединен с первым входом блока 3.2, четвертый выход блока 1 соединен со вторым входом блока 3.2, выход которого соединен со вторым входом блока 4.1, пятый выход блока 1 соединен с входом блока 5, выход которого соединен с первым входом блока 3.3, шестой выход блока 1 соединен со вторым входом блока 3.3, выход которого соединен с третьим входом блока 4.1, выход которого является первым выходом устройства; седьмой выход блока 1 соединен с входом блока 6.1, выход которого соединен с первым входом блока 3.7, восьмой выход блока 1 соединен с входом блока 7.1 и вторым входом блока 3.4, выход блока 7.1 соединен с входом блока 2.2, выход которого соединен с первым входом блока 3.4, выход которого соединен с первым входом блока 8.1, девятый выход блока 1 соединен с первым входом блока 3.5, десятый выход блока 1 соединен с входом блока 7.2, выход которого соединен со вторым входом блока 3.5, выход которого соединен со вторым входом блока 8.1, выход которого соединен с первым входом блока 4.3, одиннадцатый выход блока 1 соединен с первым входом блока 4.2, двенадцатый выход блока 1 соединен со вторым входом блока 4.2, выход которого соединен с первым входом блока 3.6, тринадцатый выход блока 1 соединен со вторым входом блока 3.6, выход которого соединен со вторым входом блока 4.3, выход которого соединен со вторым входом блока 3.7, выход которого является вторым выходом устройства; четырнадцатый выход блока 1 соединен с входом блока 6.2, выход которого соединен с первым входом блока 3.11, пятнадцатый выход блока 1 соединен с входом блока 7.3 и вторым входом блока 3.8, выход блока 7.3 соединен с входом блока 2.3, выход которого соединен с первым входом блока 3.8, выход которого соединен с первым входом блока 8.2, шестнадцатый выход блока 1 соединен с первым входом блока 3.9, семнадцатый выход блока 1 соединен с входом блока 7.4, выход которого соединен со вторым входом блока 3.9, выход которого соединен со вторым входом блока 8.2, выход которого соединен с первым входом блока 4.5, восемнадцатый выход блока 1 соединен с первым входом блока 4.4, девятнадцатый выход блока 1 соединен со вторым входом блока 4.4, выход которого соединен с первым входом блока 3.10, двадцатый выход блока 1 соединен со вторым входом блока 3.10, выход которого соединен со вторым входом блока 4.5, выход которого соединен со вторым входом блока 3.11, выход которого является третьим выходом устройства; двадцать первый выход блока 1 соединен с первым входом блока 3.12, двадцать второй выход блока 1 соединен с входом блока 2.4, выход которого соединен со вторым входом блока 3.12, выход которого соединен с первым входом блока 4.6, двадцать третий выход блока 1 соединен с первым входом блока 3.13, двадцать четвертый выход блока 1 соединен со вторым входом блока 3.13, выход которого соединен со вторым входом блока 4.6, двадцать пятый выход блока 1 соединен с третьим входом блока 4.6, выход которого является четвертым выходом устройства, двадцать шестой выход блока 1 соединен с первым входом блока 3.14, двадцать седьмой выход блока 1 соединен с входом блока 2.5, выход которого соединен со вторым входом блока 3.14, выход которого соединен с первым входом блока 4.7, двадцать восьмой выход блока 1 соединен с первым входом блока 3.15, двадцать девятый выход блока 1 соединен со вторым входом блока 3.15, выход которого соединен со вторым входом блока 4.7, тридцатый выход блока 1 соединен с третьим входом блока 4.7, выход которого является пятым выходом устройства.
Обосновать цель, заявленную в устройстве, и пояснить его работу позволит рассмотрение следующей задачи.
Принято, что при движении система переводится из начального состояния

в конечное состояние

под действием обобщенных сил Q выполняется соотношение, аналогичное принципу Гамильтона - Остроградского для интеграла действия

где Т - кинетическая энергия динамической системы;  - обобщенная координата и скорость; А - работа обобщенных внешних сил; t0, t1 - время начала и окончания процесса; δ' - знак, обозначающий бесконечно малую величину, не являющуюся вариацией.
- обобщенная координата и скорость; А - работа обобщенных внешних сил; t0, t1 - время начала и окончания процесса; δ' - знак, обозначающий бесконечно малую величину, не являющуюся вариацией.
Из требования (1) следует справедливость дифференциального уравнения Лагранжа второго рода

Пусть форма уравнения (2) известна и имеет вид

где z - неизвестный параметр; ƒ - функция, непрерывная вместе со своими частными производными.
Пусть динамика идентифицируемого параметра z описывается уравнением

где η - возмущение, имеющее смысл управления процессом идентификации.
Для (4) равенство, аналогичное (1), принимает вид

из которого вытекает уравнение Лагранжа второго рода в форме

где θ - кинетическая энергия динамики параметров; а - работа возмущения.
Уравнение наблюдения имеет вид

где y - наблюдение; H(q,t) - непрерывная вместе с частными производными функция; n(t) - белый гауссовский шум с известными локальными характеристиками.
Необходимо определить оценки параметра  из условия минимума функционала невязки
из условия минимума функционала невязки

где β - константа, характеризующая интенсивность шумов наблюдения.
Подробное решение поставленной задачи с доказательством приведено в [2]. Результатом доказательства постановки задачи (1)-(8) являются уравнения последовательной идентификации динамических систем [2]


Здесь  - функция чувствительности системы (3) по параметру
- функция чувствительности системы (3) по параметру  .
.
Пример идентификации параметров динамической системы
Рассмотрим динамическую систему с одной степенью свободы, дифференциальное уравнение движения которой в обобщенных координатах имеет вид

где q - обобщенная координата,
 - показатель степени затухания колебаний [с-1],
- показатель степени затухания колебаний [с-1],
 - частота собственных колебаний [с-1],
- частота собственных колебаний [с-1],
 - относительная амплитуда возмущающей силы [м/с],
- относительная амплитуда возмущающей силы [м/с],
μпр - приведенный коэффициент сопротивления,
спр - приведенная жесткость пружины,
mпр - приведенная масса,
F0 - возмущающая сила.
Уравнение наблюдения имеет вид

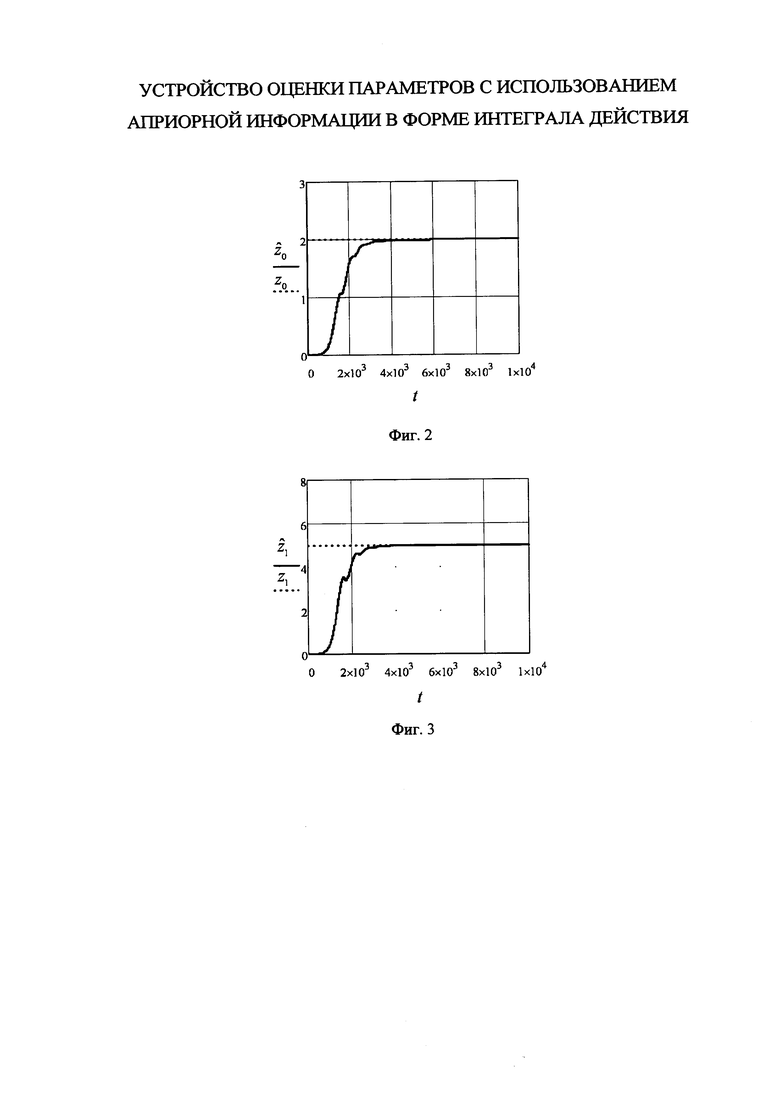
Требуется идентифицировать параметры z0=2 [с-1] и z1=5 [с-1] из условия минимума целевого функционала

В [4] показано, что в практических расчетах при построении синтезирующей функции следует использовать

где L - константа. Тогда решение поставленной задачи (10)-(12) на основе (9) с учетом (13) определяется следующей системой уравнений


где μ=0.5, L0=0.054, L1=0.096.
Результаты численного моделирования представлены на фиг. 2, где приведена идентификация показателя степени затухания колебаний, и фиг. 3, где изображен процесс идентификации коэффициента частоты собственных затуханий.
Относительная погрешность оценок параметров в установившемся режиме составляет соответственно δz0=0.48%, δz1=0.96%.
Идентификация параметров разработанным методом требует решения N=2(2n+1) дифференциальных уравнений первого порядка, где  . В рассматриваемом примере N=18. Для реализации фильтра Калмана в этом случае необходимо решить 54 дифференциальных уравнения первого порядка. Таким образом, использование предлагаемого метода обеспечит снижение вычислительных затрат.
. В рассматриваемом примере N=18. Для реализации фильтра Калмана в этом случае необходимо решить 54 дифференциальных уравнения первого порядка. Таким образом, использование предлагаемого метода обеспечит снижение вычислительных затрат.
Кроме того, анализ работ [1, 4, 5] позволяет утверждать об увеличение скорости сходимости идентифицируемых параметров к их действительному значению и точности их оценки при условии, что модель динамики идентифицируемого параметра представлена дифференциальным уравнением второго порядка.
Устройство работает следующим образом. В начальный момент времени t=t0 на вход блока 1 поступают начальные данные  , далее значение
, далее значение  с первого выхода блока 1 поступает на первый вход блока 3.1, значение
с первого выхода блока 1 поступает на первый вход блока 3.1, значение  поступает на вход блока 2.1, на выходе которого формируется значение
поступает на вход блока 2.1, на выходе которого формируется значение  и поступает на второй вход блока 3.1, на выходе которого формируется значение
и поступает на второй вход блока 3.1, на выходе которого формируется значение  и поступает на первый вход блока 4.1, значение
и поступает на первый вход блока 4.1, значение  с третьего выхода блока 1 поступает на первый вход блока 3.2, значение
с третьего выхода блока 1 поступает на первый вход блока 3.2, значение  с четвертого выхода блока 1 поступает на второй вход блока 3.2, на выходе которого формируется значение
с четвертого выхода блока 1 поступает на второй вход блока 3.2, на выходе которого формируется значение  и поступает на второй вход блока 4.1, значение t c пятого выхода блока 1 поступает на вход блока 5, на выходе которого формируется значение sin(t) и поступает на первый вход блока 3.3, значение h0 с шестого выхода блока 1 поступает на второй вход блока 3.3, на выходе которого формируется значение h0 sin(t) и поступает на третий вход блока 4.1, на выходе которого формируется значение
и поступает на второй вход блока 4.1, значение t c пятого выхода блока 1 поступает на вход блока 5, на выходе которого формируется значение sin(t) и поступает на первый вход блока 3.3, значение h0 с шестого выхода блока 1 поступает на второй вход блока 3.3, на выходе которого формируется значение h0 sin(t) и поступает на третий вход блока 4.1, на выходе которого формируется значение  , определяющее
, определяющее  , и поступает на первый выход устройства; значение μ с седьмого выхода блока 1 поступает на вход блока 6.1, на выходе которого формируется значение μ-1 и поступает на первый вход блока 3.7, значение
, и поступает на первый выход устройства; значение μ с седьмого выхода блока 1 поступает на вход блока 6.1, на выходе которого формируется значение μ-1 и поступает на первый вход блока 3.7, значение  с восьмого выхода блока 1 поступает на вход блока 7.1 и второй вход блока 3.4, на выходе блока 7.1 формируется значение
с восьмого выхода блока 1 поступает на вход блока 7.1 и второй вход блока 3.4, на выходе блока 7.1 формируется значение  и поступает на вход блока 2.2, на выходе которого формируется значение
и поступает на вход блока 2.2, на выходе которого формируется значение  и поступает на первый вход блока 3.4, на выходе которого формируется значение
и поступает на первый вход блока 3.4, на выходе которого формируется значение  и поступает на первый вход блока 8.1, значение L0 с девятого выхода блока 1 поступает на первый вход блока 3.5, значение
и поступает на первый вход блока 8.1, значение L0 с девятого выхода блока 1 поступает на первый вход блока 3.5, значение  с десятого выхода блока 1 поступает на вход блока 7.2, на выходе которого формируется значение
с десятого выхода блока 1 поступает на вход блока 7.2, на выходе которого формируется значение  и поступает на второй вход блока 3.5, на выходе которого формируется значение
и поступает на второй вход блока 3.5, на выходе которого формируется значение  и поступает на второй вход блока 8.1, на выходе которого формируется значение
и поступает на второй вход блока 8.1, на выходе которого формируется значение  и поступает на первый вход блока 4.3, значение у с одиннадцатого выхода блока 1 поступает на первый вход блока 4.2, значение
и поступает на первый вход блока 4.3, значение у с одиннадцатого выхода блока 1 поступает на первый вход блока 4.2, значение  с двенадцатого выхода блока 1 поступает на второй вход блока 4.2, на выходе которого формируется значение
с двенадцатого выхода блока 1 поступает на второй вход блока 4.2, на выходе которого формируется значение  и поступает на первый вход блока 3.6, значение G0 с тринадцатого выхода блока 1 поступает на второй вход блока 3.6, на выходе которого формируется значение
и поступает на первый вход блока 3.6, значение G0 с тринадцатого выхода блока 1 поступает на второй вход блока 3.6, на выходе которого формируется значение  и поступает на второй вход блока 4.3, на выходе которого формируется значение
и поступает на второй вход блока 4.3, на выходе которого формируется значение  и поступает на второй вход блока 3.7, на выходе которого формируется значение
и поступает на второй вход блока 3.7, на выходе которого формируется значение  , определяющее
, определяющее  , и поступает на второй выход устройства; значение μ с четырнадцатого выхода блока 1 поступает на вход блока 6.2, на выходе которого формируется значение μ-1 и поступает на первый вход блока 3.11, значение
, и поступает на второй выход устройства; значение μ с четырнадцатого выхода блока 1 поступает на вход блока 6.2, на выходе которого формируется значение μ-1 и поступает на первый вход блока 3.11, значение  с пятнадцатого выхода блока 1 поступает на вход блока 7.3 и второй вход блока 3.8, на выходе блока 7.3 формируется значение
с пятнадцатого выхода блока 1 поступает на вход блока 7.3 и второй вход блока 3.8, на выходе блока 7.3 формируется значение  и поступает на вход блока 2.3, на выходе которого формируется значение
и поступает на вход блока 2.3, на выходе которого формируется значение  и поступает на первый вход блока 3.8, на выходе которого формируется значение
и поступает на первый вход блока 3.8, на выходе которого формируется значение  и поступает на первый вход блока 8.2, значение L1 с шестнадцатого выхода блока 1 поступает на первый вход блока 3.9, значение
и поступает на первый вход блока 8.2, значение L1 с шестнадцатого выхода блока 1 поступает на первый вход блока 3.9, значение  с семнадцатого выхода блока 1 поступает на вход блока 7.4, на выходе которого формируется значение
с семнадцатого выхода блока 1 поступает на вход блока 7.4, на выходе которого формируется значение  и поступает на второй вход блока 3.9, на выходе которого формируется значение
и поступает на второй вход блока 3.9, на выходе которого формируется значение  и поступает на второй вход блока 8.2, на выходе которого формируется значение
и поступает на второй вход блока 8.2, на выходе которого формируется значение  и поступает на первый вход блока 4.5, значение y с восемнадцатого выхода блока 1 поступает на первый вход блока 4.4, значение
и поступает на первый вход блока 4.5, значение y с восемнадцатого выхода блока 1 поступает на первый вход блока 4.4, значение  с девятнадцатого выхода блока 1 поступает на второй вход блока 4.4, на выходе которого формируется значение
с девятнадцатого выхода блока 1 поступает на второй вход блока 4.4, на выходе которого формируется значение  и поступает на первый вход блока 3.10, значение G1 с двадцатого выхода блока 1 поступает на второй вход блока 3.10, на выходе которого формируется значение
и поступает на первый вход блока 3.10, значение G1 с двадцатого выхода блока 1 поступает на второй вход блока 3.10, на выходе которого формируется значение  и поступает на второй вход блока 4.5, на выходе которого формируется значение
и поступает на второй вход блока 4.5, на выходе которого формируется значение  и поступает на второй вход блока 3.11, на выходе которого формируется значение
и поступает на второй вход блока 3.11, на выходе которого формируется значение  ? определяющее
? определяющее  , и поступает на третий выход устройства; значение
, и поступает на третий выход устройства; значение  с двадцать первого выхода блока 1 поступает на первый вход блока 3.12, значение
с двадцать первого выхода блока 1 поступает на первый вход блока 3.12, значение  с двадцать второго выхода блока 1 поступает на вход блока 2.4, на выходе которого формируется значение - и поступает на второй вход блока 3.12, на выходе которого формируется значение
с двадцать второго выхода блока 1 поступает на вход блока 2.4, на выходе которого формируется значение - и поступает на второй вход блока 3.12, на выходе которого формируется значение  и поступает на первый вход блока 4.6, значение G0 с двадцать третьего выхода блока 1 поступает на первый вход блока 3.13, значение с двадцать четвертого выхода блока 1 поступает на второй вход блока 3.13, на выходе которого формируется значение
и поступает на первый вход блока 4.6, значение G0 с двадцать третьего выхода блока 1 поступает на первый вход блока 3.13, значение с двадцать четвертого выхода блока 1 поступает на второй вход блока 3.13, на выходе которого формируется значение  и поступает на второй вход блока 4.6, значение
и поступает на второй вход блока 4.6, значение  с двадцать пятого выхода блока 1 поступает на третий вход блока 4.6, на выходе которого формируется значение
с двадцать пятого выхода блока 1 поступает на третий вход блока 4.6, на выходе которого формируется значение  , определяющее
, определяющее  , и поступает на четвертый выход устройства; значение
, и поступает на четвертый выход устройства; значение  с двадцать шестого выхода блока 1 поступает на первый вход блока 3.14, значение
с двадцать шестого выхода блока 1 поступает на первый вход блока 3.14, значение  с двадцать седьмого выхода блока 1 поступает на вход блока 2.5, на выходе которого формируется значение - и поступает на второй вход блока 3.14, на выходе которого формируется значение
с двадцать седьмого выхода блока 1 поступает на вход блока 2.5, на выходе которого формируется значение - и поступает на второй вход блока 3.14, на выходе которого формируется значение  и поступает на первый вход блока 4.7, значение G1 с двадцать восьмого выхода блока 1 поступает на первый вход блока 3.15, значение
и поступает на первый вход блока 4.7, значение G1 с двадцать восьмого выхода блока 1 поступает на первый вход блока 3.15, значение  с двадцать девятого выхода блока 1 поступает на второй вход блока 3.15, на выходе которого формируется значение
с двадцать девятого выхода блока 1 поступает на второй вход блока 3.15, на выходе которого формируется значение  и поступает на второй вход блока 4.7, значение
и поступает на второй вход блока 4.7, значение  с тридцатого выхода блока 1 поступает на третий вход блока 4.7, на выходе которого формируется значение
с тридцатого выхода блока 1 поступает на третий вход блока 4.7, на выходе которого формируется значение  , определяющее
, определяющее  , и поступает на пятый выход устройства.
, и поступает на пятый выход устройства.
В следующий момент времени работа устройства повторяется до момента t-t1, при этом обеспечивается максимальная точность оцениваемых параметров  и
и  .
.
Литература
1. Браммер К., Зиффлинг Г. Фильтр Калмана-Бьюси. М.: Наука, 1982. 210 с.
2. Костоглотов А.А., Лазаренко С.В., Дерябкин И.В., Чеботарев А.В., Ценных Б.М. Метод идентификации параметров динамических систем на основе совмещенного с физическими принципами синтеза // Нелинейный мир, 2012 г., Том №10, №11 с. 801-809.
3. Патент РФ №2464615 от 20.10.2012 г. Устройство идентификации параметров динамических систем на основе вариационных принципов // Андрашитов Д.С., Костоглотов А.А., Кузнецов А.А., Лазаренко С.В., Сметанникова Н.А.
4. Костоглотов А.А., Костоглотов А.И., Лазаренко С.В. Объединенный принцип максимума в задачах оценки параметров движения маневрирующего летательного аппарата // Радиотехника и электроника, 2009, №4 (54), С. 450-457.
5. Андрашитов Д.С, Костоглотов А.А., Лазаренко С.В., Дерябкин И.В. Анализ функционирования алгоритмов параметрической идентификации информационно-управляющих систем, удовлетворяющих принципу Гамильтона-Остроградского // Динамика сложных систем XXI век. Том 8, №2, 2014 г. - С. 90-95.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство идентификации параметров акселерометра | 2014 |
|
RU2628279C2 |
| Устройство идентификации параметров динамических звеньев информационно-управляющих систем | 2014 |
|
RU2632681C2 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ ДИНАМИЧЕСКИХ СИСТЕМ НА ОСНОВЕ ВАРИАЦИОННЫХ ПРИНЦИПОВ | 2011 |
|
RU2464615C1 |
| ЦИФРОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ МНОГОКАСКАДНЫЙ ФИЛЬТР | 2010 |
|
RU2436228C1 |
| ЦИФРОВОЕ УСТРОЙСТВО ОЦЕНКИ ПАРАМЕТРОВ ЛЧМ-СИГНАЛОВ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2015 |
|
RU2602391C1 |
| ЦИФРОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ РЕКУРСИВНЫЙ ФИЛЬТР | 2007 |
|
RU2357357C2 |
| ЦИФРОВОЙ ИНТЕЛЛЕКТУАЛЬНЫЙ ИТЕРАТИВНЫЙ ФИЛЬТР | 2007 |
|
RU2362265C1 |
| АДАПТИВНЫЙ ЭКСТРАПОЛЯТОР | 2015 |
|
RU2601143C1 |
| Устройство оценки состояния и идентификации параметров моделей динамических систем | 2016 |
|
RU2653939C1 |
| Устройство управления автоматическими системами при структурной неопределенности | 2018 |
|
RU2697728C1 |
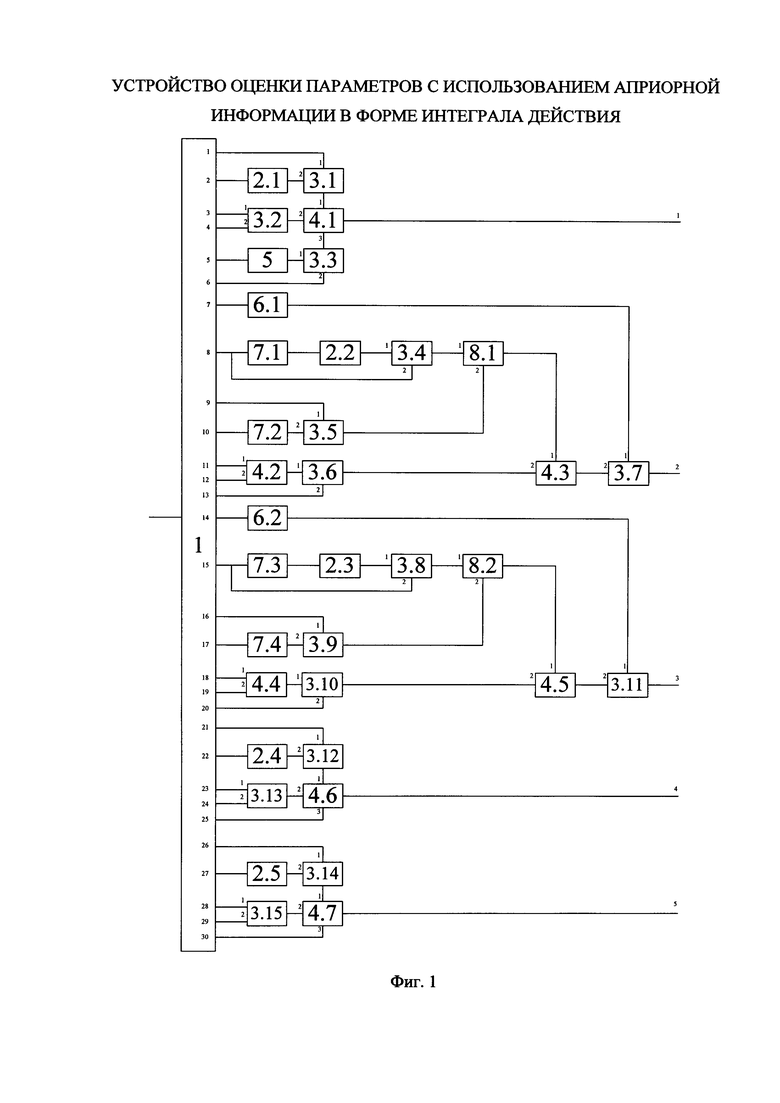
Устройство оценки параметров с использованием априорной информации в форме интеграла действия содержит блок хранения констант, пять блоков инверсии, пятнадцать блоков произведения, семь блоков вычитания, блок вычисления синуса угла, два блока возведения в степень (-1), четыре блока формирования модуля, два блока деления, соединенные определенным образом. Обеспечивается снижение объема вычислительных затрат, увеличение скорости сходимости идентифицируемых параметров к их действительному значению и точность их оценки. 3 ил.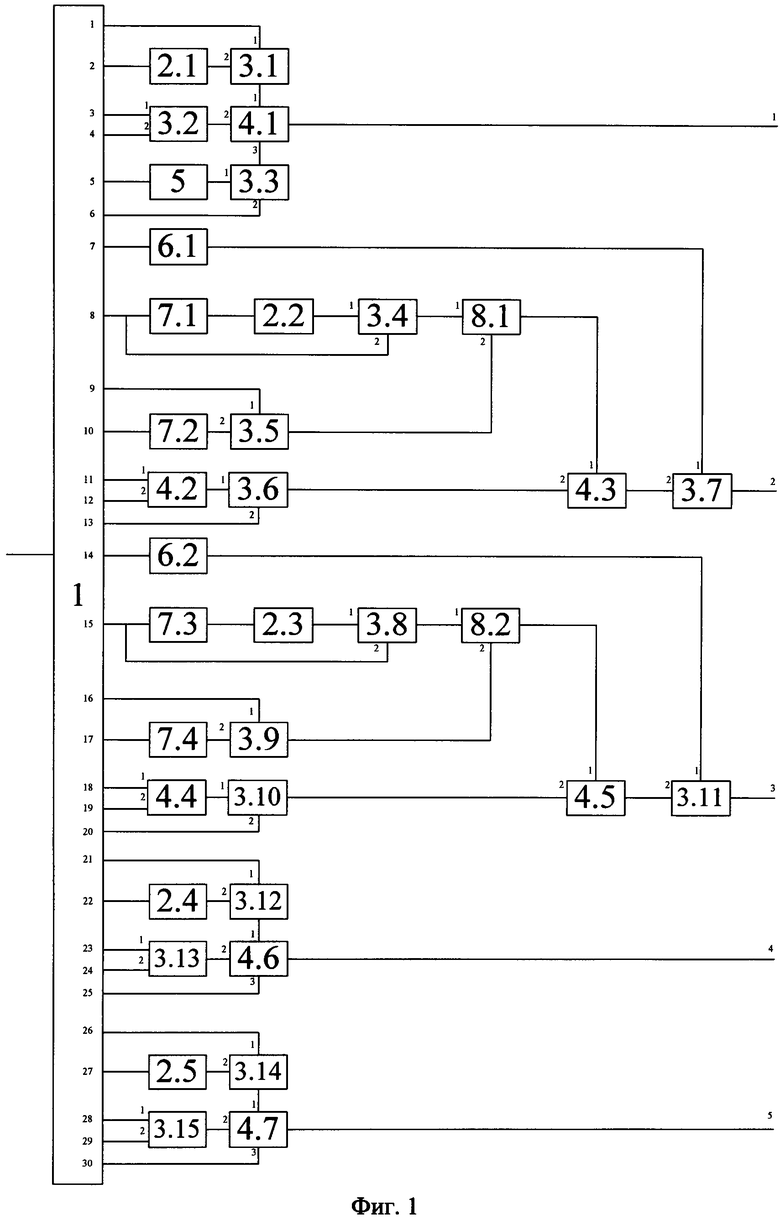
Устройство оценки параметров с использованием априорной информации в форме интеграла действия. содержащее блоки: блок хранения констант, первый, второй, третий блоки вычитания, отличающееся тем, что в него введены блоки инверсии, блоки произведения, четвертый, пятый, шестой, седьмой блоки вычитания, блоки возведения в степень (-1), блоки формирования модуля, блоки деления, при этом вход блока (1) является входом устройства, первый выход блока (1) соединен с первым входом блока (3.1), второй выход блока (1) соединен с входом блока (2.1), выход которого соединен со вторым входом блока (3.1), выход которого соединен с первым входом блока (4.1), третий выход блока (1) соединен с первым входом блока (3.2), четвертый выход блока (1) соединен со вторым входом блока (3.2), выход которого соединен со вторым входом блока (4.1), пятый выход блока (1) соединен с входом блока (5), выход которого соединен с первым входом блока (3.3), шестой выход блока (1) соединен со вторым входом блока (3.3), выход которого соединен с третьим входом блока (4.1), выход которого является первым выходом устройства; седьмой выход блока (1) соединен с входом блока (6.1), выход которого соединен с первым входом блока (3.7), восьмой выход блока (1) соединен с входом блока (7.1) и вторым входом блока (3.4), выход блока (7.1) соединен с входом блока (2.2), выход которого соединен с первым входом блока (3.4), выход которого соединен с первым входом блока (8.1), девятый выход блока (1) соединен с первым входом блока (3.5), десятый выход блока (1) соединен с входом блока (7.2), выход которого соединен со вторым входом блока (3.5), выход которого соединен со вторым входом блока (8.1), выход которого соединен с первым входом блока (4.3), одиннадцатый выход блока (1) соединен с первым входом блока (4.2), двенадцатый выход блока (1) соединен со вторым входом блока (4.2), выход которого соединен с первым входом блока (3.6), тринадцатый выход блока (1) соединен со вторым входом блока (3.6), выход которого соединен со вторым входом блока (4.3), выход которого соединен со вторым входом блока (3.7), выход которого является вторым выходом устройства; четырнадцатый выход блока (1) соединен с входом блока (6.2), выход которого соединен с первым входом блока (3.11), пятнадцатый выход блока (1) соединен с входом блока (7.3) и вторым входом блока (3.8), выход блока (7.3) соединен с входом блока (2.3), выход которого соединен с первым входом блока (3.8), выход которого соединен с первым входом блока (8.2), шестнадцатый выход блока (1) соединен с первым входом блока (3.9), семнадцатый выход блока (1) соединен с входом блока (7.4), выход которого соединен со вторым входом блока (3.9), выход которого соединен со вторым входом блока (8.2), выход которого соединен с первым входом блока (4.5), восемнадцатый выход блока (1) соединен с первым входом блока (4.4), девятнадцатый выход блока (1) соединен со вторым входом блока (4.4), выход которого соединен с первым входом блока (3.10), двадцатый выход блока (1) соединен со вторым входом блока (3.10), выход которого соединен со вторым входом блока (4.5), выход которого соединен со вторым входом блока (3.11), выход которого является третьим выходом устройства; двадцать первый выход блока (1) соединен с первым входом блока (3.12), двадцать второй выход блока (1) соединен с входом блока (2.4), выход которого соединен со вторым входом блока (3.12), выход которого соединен с первым входом блока (4.6), двадцать третий выход блока (1) соединен с первым входом блока (3.13), двадцать четвертый выход блока (1) соединен со вторым входом блока (3.13), выход которого соединен со вторым входом блока (4.6), двадцать пятый выход блока (1) соединен с третьим входом блока (4.6), выход которого является четвертым выходом устройства, двадцать шестой выход блока (1) соединен с первым входом блока (3.14), двадцать седьмой выход блока (1) соединен с входом блока (2.5), выход которого соединен со вторым входом блока (3.14), выход которого соединен с первым входом блока (4.7), двадцать восьмой выход блока (1) соединен с первым входом блока (3.15), двадцать девятый выход блока (1) соединен со вторым входом блока (3.15), выход которого соединен со вторым входом блока (4.7), тридцатый выход блока (1) соединен с третьим входом блока (4.7), выход которого является пятым выходом устройства.
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ЛАГРАНЖЕВЫХ ДИНАМИЧЕСКИХ СИСТЕМ НА ОСНОВЕ ИТЕРАЦИОННОЙ РЕГУЛЯРИЗАЦИИ | 2013 |
|
RU2528133C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ ДИНАМИЧЕСКИХ СИСТЕМ НА ОСНОВЕ ВАРИАЦИОННЫХ ПРИНЦИПОВ | 2011 |
|
RU2464615C1 |
| RU 2013139442 A, 10.03.2015 | |||
| US 7024336 B2, 04.04.2006 | |||
| US 20150323912 A1, 12.11.2015. | |||

