Изобретение относится к области цифровой обработки радиолокационной информации и может быть использовано в любой области техники для экстраполяции координат движущихся объектов.
Известен фильтр «скользящего» сглаживания линейной траектории [1, с. 383], состоящий из сумматоров, усилителей и линий задержек. Недостатком этого фильтра является низкая точность сопровождения маневрирующих объектов, обусловленная несоответствием используемой кинематической модели прямолинейного движения для экстраполяции его координат действительному закону изменения координат движущегося по произвольной траектории объекта.
Наиболее близким по технической сущности и достигаемому результату является экстраполятор, используемый для экстраполяции процессов, которые аппроксимируются многочленом, имеющим конечную производную, равную нулю, и содержащий: запоминающие устройства, вход экстраполятора, сумматор, выход экстраполятора, вычислительные блоки и соответствующие связи между ними [2]. В основу экстраполятора положено полиномиальное представление экстраполируемого процесса, что не отражает его истинного закона изменения, а лишь является его аппроксимацией на ограниченном участке наблюдения.
Применение такого экстраполятора в системах сопровождения для экстраполяции координат маневрирующих объектов приводит в некоторых случаях к недопустимому увеличению динамических ошибок, что обусловлено несоответствием полиномиального представления экстраполируемого процесса его действительному характеру. Этот недостаток ограничивают применение указанного экстраполятора в системах радиолокационных системах вторичной обработки информации, функционирующих в сложной помеховой обстановке в реальном масштабе времени.
Техническим результатом является повышение точности оценки координат маневрирующих объектов за счет снижения динамических ошибок экстраполяции в условиях неопределенности закона изменения координат.
Технический результат достигается тем, что экстраполятор, содержащий цепочку последовательно соединенных первого запоминающего устройства, вход которого является входом экстраполятора, первого блока вычитания, вычитающий вход которого соединен с выходом запоминающего устройства, а суммирующий вход - с входом экстраполятора, сумматора, первый вход которого соединен с выходом первого блока вычитания, второй - с входом экстраполятора, а выход является выходом экстраполятора, дополнительно содержит 4 входа, 3 блока умножения, 2 блока выделения модуля, второй блок вычитания, блок отношения и 3 запоминающих устройства, при этом второй вход экстраполятора соединен со вторым входом второго запоминающего устройства, первый вход которого соединен с выходом экстраполятора, выход второго запоминающего устройства соединен с вычитающим входом второго блока вычитания, вторым входом первого запоминающего устройства, суммирующим входом первого блока вычитания, входом первого блока выделения модуля, а также вторым входом сумматора, суммирующий вход второго вычитающего устройства соединен с четвертым входом экстраполятора, выход второго блока вычитания соединен с первым входом третьего блока умножения, второй вход которого соединен с выходом третьего запоминающего устройства, вход которого соединен с пятым входом экстраполятора, выход третьего блока умножения соединен с четвертым входом сумматора, третий вход которого соединен с выходом второго блока умножения, второй вход которого соединен с выходом второго запоминающего устройства, вход которого соединен с третьим входом экстраполятора, первый вход второго блока умножения соединен с выходом блока отношения, первый вход которого соединен с выходом первого блока выделения модуля, вход второго блока выделения модуля и первый вход первого блока умножения соединены с выходом первого блока вычитания, выход второго блока выделения модуля соединен с первым входом первого блока умножения, выход которого соединен со вторым входом блока отношения.
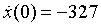
На фиг.1 представлена структурная схема адаптивного экстраполятора, которая состоит из запоминающих устройств 1, 4, 9 и 13, вычитающих устройств 2 и 11, сумматора 3, блоков выделения модуля 5 и 8, блока отношения 6, блоков умножения 7, 10 и 12. Адаптивный экстраполятор также имеет входы 14-18 и выход 19.
В основу построения адаптивного экстраполятора положено выражение [3]

где 




Выражение (1) получено в [3] с использованием требования соответствия любой физически реализуемой траектории движения вариационному принципу Гамильтона - Остроградского.
Адаптивный экстраполятор работает следующим образом. За один такт, равный шагу экстраполяции, до начала работы адаптивного экстраполятора на его входы 16 и 17 подаются значения










поступающее на выход сумматора и на первый вход второго запоминающего устройства, с выхода которого через один такт оно уже в виде значения и

Снижение динамической ошибки экстраполяции координат маневрирующего объекта достигается за счет оптимального выбора соотношения между величиной текущего значения невязки 
Ниже приведен пример определения текущих оценок координат движущегося объекта с использованием предлагаемого устройства и устройства-прототипа методом статистического моделирования.
Пример.
В одном пространственном измерении рассматривается движение маневрирующего объекта. Уравнение наблюдения

где 

Устройство-прототип реализовано в алгоритме оценивания, известном как α-β-фильтр [1]. За показатель точности выбрана средняя квадратическая ошибка (СКО) оценки координат объекта 
Исходные данные для статистического моделирования: начальное значение наблюдаемой координаты и скорости ее изменения 
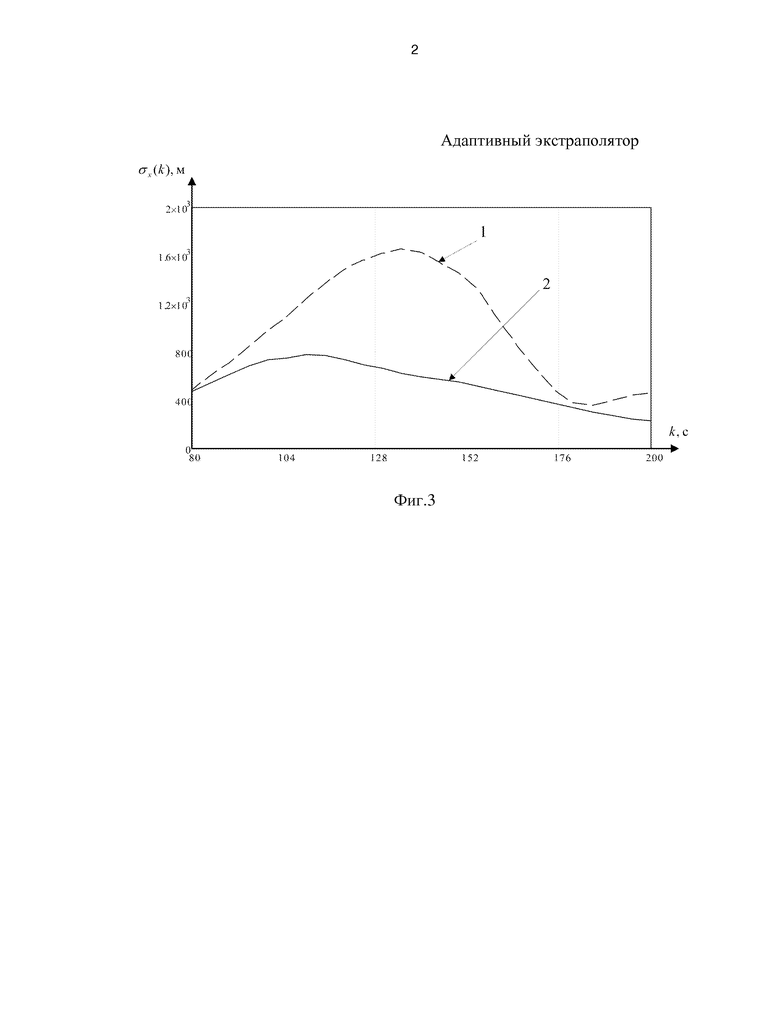
Результаты статистического моделирования для интервала маневрирования объекта: с 80-й по 200-ю секунды - представлены на фигуре 3, где цифрами обозначены: 1 - СКО оценки координаты α-β фильтра; 2 - СКО оценки координаты адаптивного экстраполятора (1). Как видно, в условиях приведенного примера по сравнению с α-β фильтром использование предлагаемого технического решения позволяет повысить точность оценки координат маневрирующих объектов за счет снижения динамических ошибок до 60%.
Результаты, приведенные в примере, позволяют сделать заключение о повышении точности оценки координат маневрирующего объекта за счет снижения динамических ошибок экстраполяции в сравнении с прототипом при использовании предлагаемого технического решения.
Литература
1. Кузьмин С. З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974. 432 с.
2. А. с. СССР №415672, МПК6 G06G7/30, заявл. 02.07.71; опубл. 15.02.74.
3. Костоглотов А.А., Кузнецов А.А., Лазаренко С. В., Ценных Б.М. Анализ функционирования фильтра объединенного принципа максимума при сопровождении маневрирующей цели //Труды XII всероссийского совещания по проблемам управления. ВСПУ-2014, Москва ИПУ РАН, 16-19 июня 2014. С. 378-338.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ ЭКСТРАПОЛЯТОР С КОРРЕКЦИЕЙ ПРОГНОЗА | 2020 |
|
RU2740337C1 |
| Экстраполятор с адаптацией по целевому функционалу | 2021 |
|
RU2780197C1 |
| АДАПТИВНЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2012 |
|
RU2492506C1 |
| Квазилинейный адаптивный экстраполятор | 2017 |
|
RU2675906C1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| ПРОГНОЗАТОР | 1996 |
|
RU2113006C1 |
| Экстраполятор | 1981 |
|
SU1003108A1 |
| Система экстремального регулирования | 1981 |
|
SU1029140A1 |
| Адаптивная система регулирования многомерного объекта | 1981 |
|
SU1174901A1 |
| Адаптивный прогнозирующий регулятор для компенсации контролируемых возмущений | 1981 |
|
SU1125603A1 |
Изобретение относится к области цифровой обработки радиолокационной информации. Техническим результатом является повышение точности оценки координат маневрирующих объектов за счет снижения динамических ошибок экстраполяции в условиях неопределенности закона изменения координат. Адаптивный экстраполятор содержит цепочку последовательно соединенных первого запоминающего устройства, вход которого является входом экстраполятора, первого блока вычитания, вычитающий вход которого соединен с выходом запоминающего устройства, а суммирующий вход - с входом экстраполятора, сумматора, первый вход которого соединен с выходом первого блока вычитания, второй - с входом экстраполятора, а выход является выходом экстраполятора, три блока умножения, два блока выделения модуля, второй блок вычитания, блок отношения и три запоминающих устройства. 3 ил.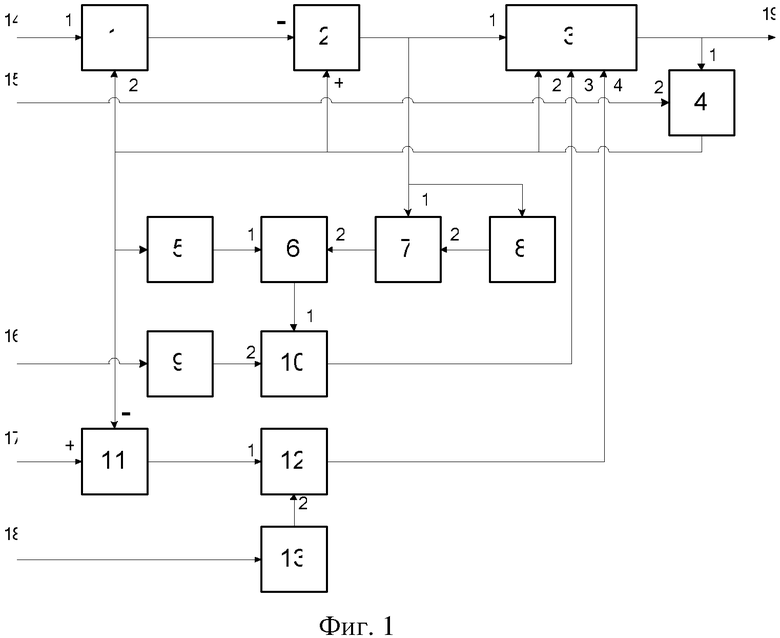
Адаптивный экстраполятор, содержащий цепочку последовательно соединенных первого запоминающего устройства, вход которого является входом экстраполятора, первого блока вычитания, вычитающий вход которого соединен с выходом запоминающего устройства, а суммирующий вход - с входом экстраполятора, сумматора, первый вход которого соединен с выходом первого блока вычитания, второй - с входом экстраполятора, а выход является выходом экстраполятора, отличающийся тем, что он дополнительно содержит 4 входа, 3 блока умножения, 2 блока выделения модуля, второй блок вычитания, блок отношения и 3 запоминающих устройства, при этом второй вход экстраполятора соединен со вторым входом второго запоминающего устройства, первый вход которого соединен с выходом экстраполятора, выход второго запоминающего устройства соединен с вычитающим входом второго блока вычитания, вторым входом первого запоминающего устройства, суммирующим входом первого блока вычитания, входом первого блока выделения модуля, а также вторым входом сумматора, суммирующий вход второго вычитающего устройства соединен с четвертым входом экстраполятора, выход второго блока вычитания соединен с первым входом третьего блока умножения, второй вход которого соединен с выходом третьего запоминающего устройства, вход которого соединен с пятым входом экстраполятора, выход третьего блока умножения соединен с четвертым входом сумматора, третий вход которого соединен с выходом второго блока умножения, второй вход которого соединен с выходом второго запоминающего устройства, вход которого соединен с третьим входом экстраполятора, первый вход второго блока умножения соединен с выходом блока отношения, первый вход которого соединен с выходом первого блока выделения модуля, вход второго блока выделения модуля и первый вход первого блока умножения соединены с выходом первого блока вычитания, выход второго блока выделения модуля соединен с первым входом первого блока умножения, выход которого соединен со вторым входом блока отношения.
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 2010 |
|
RU2444038C1 |
| Экстраполятор | 1981 |
|
SU1003108A1 |
| US 5381357 A, 10.01.1995 | |||
| Способ получения коньячного спирта | 1978 |
|
SU700543A1 |

