Изобретение относится к специализированным средствам контроля и диагностики функционирования интегрированных информационно-управляющих систем беспилотных летательных аппаратов (БПЛА) и может быть использовано при производстве таких систем для наладки, а также проведения испытаний.
Известна автоматизированная контрольно-проверочная аппаратура (АКПА), содержащая ПЭВМ, коммутатор сигналов, блок контроля цепей, блок управления, многоканальный блок сравнения, виртуальный эталон, коммутатор, формирователь выходных сигналов, мультиплексор, блок нормализации, состоящий из измерителя напряжения и измерителя цепи.
Недостатком данной АКПА является жесткая связь аппаратной структуры с конкретным типом объекта контроля. При создании АКПА для нового объекта контроля необходимо полностью повторять цикл разработки.
Известна выбранная в качестве ближайшего аналога АКПА, состоящая из многоканального блока сравнения, виртуального эталона, блока нормализации, мультиплексора, коммутатора, формирователя выходных сигналов, блока управления, формирователя АСП, блока хранения эталонов, блока хранения результатов контроля, индикатора исправности [2].
Недостатками известной АКПА являются:
- узкая специализация аппаратных средств, что требует повторения цикла разработки АКПА для применения ее при контроле и диагностике функционирования нового объекта контроля;
- затруднена оперативная обработка протоколов контроля и диагностики, поскольку все результаты сохраняются во внутреннюю энергонезависимую память АКПА, доступ к которой возможен только при подключении технологической ПЭВМ;
- контроль и диагностика большого количества объектов контроля с разными наборами тестов затруднено, поскольку смена эталона или набора эталонов возможна только при подключении технологической ПЭВМ.
Задача изобретения - создание быстродействующей АКПА, ориентированной на контроль и диагностику определенного класса устройств, обеспечивающей сокращение времени разработки очередной АКПА за счет внедрения специализированной модульной архитектуры АКПА с реконфигурируемой структурой составных частей.
Для достижения указанных результатов в АКПА, содержащую формирователь выходных сигналов, выход которого соединен с входом объекта контроля, блок управления, соединенный с коммутатором и формирователем выходных сигналов, и блок нормализации, согласно изобретению введены ПЭВМ, контроллер интерфейса, устройство измерения длительностей и задержек, блок имитаторов, блок АЦП, блок ЦАП, при этом контроллер интерфейса соединен с ПЭВМ и блоком управления, блок имитаторов соединен с блоком управления и блоком ЦАП, выход которого соединен с формирователем выходных сигналов, блок нормализации соединен с блоком управления и объектом контроля, блок АЦП соединен с блоком нормализации и коммутатором, устройство измерения длительностей и задержек соединено с коммутатором и блоком управления, при этом контроллер интерфейса, блок управления, устройство измерения длительностей и задержек, коммутатор и блок имитаторов объединены в решающее устройство на основе программируемой логической интегральной схемы (ПЛИС), блок АЦП, блок ЦАП и решающее устройство на основе ПЛИС объединены в универсальный решающий модуль, блок нормализации и формирователь выходных сигналов объединены в специализированный модуль ввода/вывода.
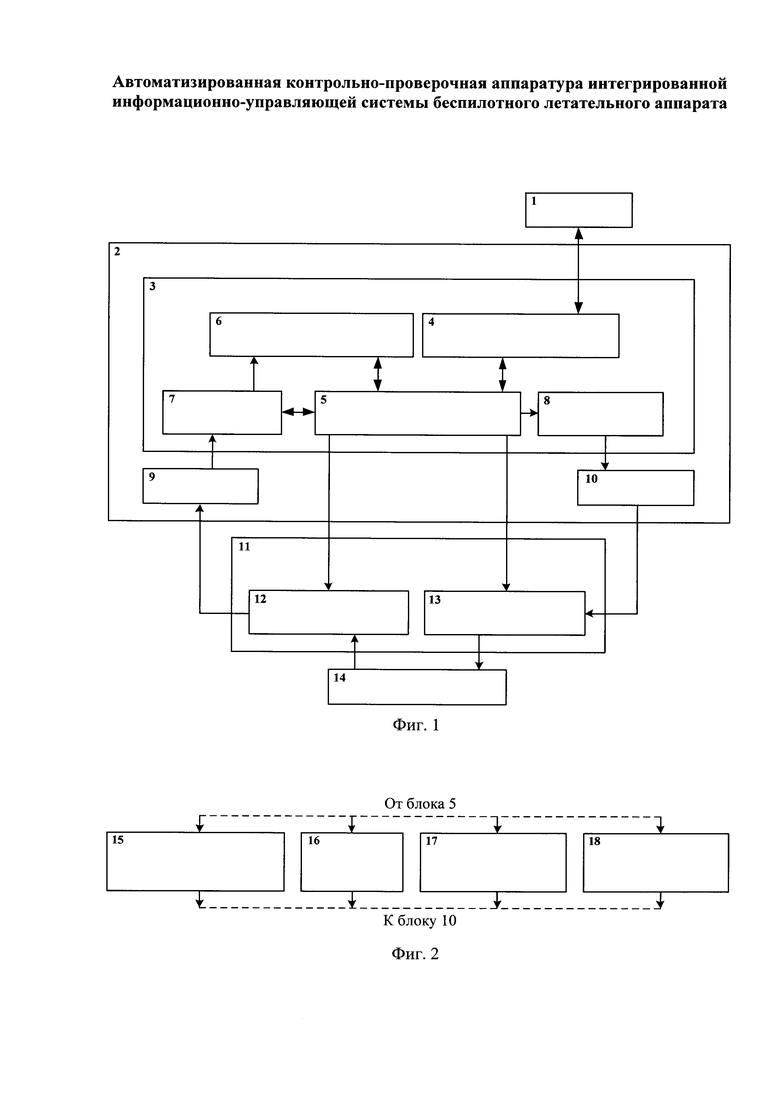
Структурная схема АКПА, подключенной к объекту контроля, представлена на фигуре 1, где 1 - ПЭВМ; 2 - универсальный решающий модуль; 3 - решающее устройство на основе ПЛИС; 4 - контроллер интерфейса; 5 - блок управления; 6 - устройство измерения длительностей и задержек; 7 - коммутатор; 8 - блок имитаторов; 9 - блок АЦП; 10 - блок ЦАП; 11 - специализированный модуль ввода/вывода; 12 - блок нормализации; 13 - формирователь выходных сигналов; 14 - объект контроля.
Структура блока имитаторов представлена на фигуре 2, где 15 - имитатор сигнала с времяимпульсной модуляцией; 16 - имитатор гироскопа; 17 - формирователь сигналов обратных связей; 18 - формирователь релейных сигналов.
Обобщенная структура АКПА состоит из
- ПЭВМ 1, реализующей функции управления, диалога с оператором, отображения и долговременного хранения информации;
- универсального решающего модуля 2, осуществляющего выдачу тестовых воздействий и прием анализируемых сигналов;
- специализированного модуля ввода/вывода 11, учитывающего особенности конкретного тестируемого устройства.
Применение ПЭВМ 1 для управления, отображения результатов контроля и диагностики, а также долгосрочного хранения информации существенно упрощает структуру АКПА, облегчает взаимодействие оператора с аппаратурой и уменьшает затраты на создание комплекта АКПА. Более того, ПЭВМ 1 может быть использована для работы с несколькими комплектами универсальных и специализированных модулей, что удобно при работе с большим числом различных объектов контроля 14.
Программное обеспечение ПЭВМ построено по модульному принципу и позволяет проводить тестирование объекта контроля 14 как в автоматическом, так и в ручном режиме. В автоматическом режиме оператор задает параметры и запускает проверку. По окончании проверки формируется подробный отчет о выполненных тестах. В ручном режиме оператор может в реальном масштабе времени менять состояния управляющих сигналов, полетное задание и наблюдать результаты обработки их объектом контроля 14.
Полностью возложить поставленные перед АКПА задачи на ПЭВМ 1 невозможно, поэтому задачи формирования тестовых воздействий и обработки реакции объекта контроля 14 в реальном времени возлагаются на универсальный решающий модуль 2, который состоит из решающего устройства на основе ПЛИС 3, блока АЦП 9 и блока ЦАП 10. Блоки АЦП 9 и ЦАП 10 представляют собой наборы многоканальных аналогово-цифровых и цифроаналоговых преобразователей. Универсальность реализуется в рамках определенного класса объектов контроля 14, а именно интегрированных информационно-управляющих систем беспилотных летательных аппаратов. Особенности каждого конкретного объекта контроля 14 учитываются за счет реконфигурации решающего устройства на основе ПЛИС 3, которое состоит из контроллера интерфейсов 4, блока управления 5, устройства измерения длительностей и задержек 6, коммутатора 7, блока имитаторов 8.
Контроллер интерфейса 4 обеспечивает обмен информацией между ПЭВМ 1 и блоком управления 5. Частным случаем контроллера интерфейса может быть контроллер PCI или PXI [3, 4]. Программное обеспечение ПЭВМ 1 управляет АКПА посредством операций чтения/записи в регистры блока управления 5. Блок имитаторов 8 (см. фиг. 2) предназначен для формирования в цифровом виде тестовых воздействий путем имитации рабочего окружения объекта контроля 14 и может состоять из имитатора сигнала с времяимпульсной модуляцией 15, имитатора гироскопа 16, формирователя сигналов обратных связей 17, формирователя релейных сигналов 18. Коммутатор 7 предназначен для передачи данных из заданных блоком управления 5 каналов АЦП в устройство измерения длительностей и задержек 6 либо в блок управления 5 для трансляции информации через контроллер интерфейса 4 в ПВЭМ 1 для последующего анализа.
Специализированный модуль ввода/вывода 11 уникален для каждого типа объекта контроля 14, поскольку на аппаратном уровне учитывает его особенности. Данный модуль состоит из блока нормализации 12 и формирователя выходных сигналов 13. Блок нормализации 12 содержит пассивные компоненты для имитации нагрузок и преобразователи уровней на основе операционных усилителей, оптронов, транзисторных ключей. Формирователь выходных сигналов 13 построен на аналогичных компонентах и предназначен для формирования входных сигналов для объекта контроля 14 с необходимыми характеристиками по нагрузочной способности, напряжению и т.п.
АКПА работает следующим образом. Объект контроля 14 подключают к специализированному модулю ввода/вывода 11, при помощи программного обеспечения ПЭВМ 1 оператор выбирает набор тестов и запускает процесс контроля и диагностики.
В соответствии с каждым тестом из выбранного набора в регистры блока управления 5 заносятся параметры блока имитаторов 8, коммутатора 7, устройства измерения длительностей и задержек 6. Блок управления 5 синхронизирует работу блока имитаторов и устройства измерения длительностей и задержек 6 для быстроизменяющихся сигналов. Измерение других параметров (амплитуда, средний уровень, частота колебаний и т.д.), а также параметров медленно изменяющихся сигналов осуществляется путем записи выходных сигналов объекта контроля 14 в буферное ОЗУ, входящее в состав блока управления 5. Дальнейший анализ полученных данных ведется программным обеспечением ПЭВМ 1.
По результатам выполнения каждой проверки на экран ПЭВМ 1 выводится сообщение о соответствии объекта контроля техническим условиям по определенному пункту. В случае обнаружения отказа выводится сообщение об ошибке с рекомендациями по устранению. По окончании выполнения всех тестов из выбранного набора на экран ПЭВМ 1 выводится полный протокол контроля и диагностики, который может быть сохранен для дальнейшего анализа.
Из приведенного описания функционирования АКПА видно, что влияние оператора на процесс контроля и диагностики минимизирован: требуется подключить объект контроля к АКПА, выбрать набор тестов, запустить его выполнение и дождаться формирования протокола проверок. Далее оператор либо признает объект контроля годным, либо занимается анализом неисправностей в соответствии с рекомендациями, сформированными программным обеспечением АКПА.
Таким образом, за счет построения АКПА на основе ПЭВМ 1 и разделения аппаратных средств на универсальный решающий модуль 3 и специализированный модуль ввода/вывода 11, а также введения решающего устройства на основе ПЛИС 3, обеспечивающего реконфигурацию аппаратной структуры цифровой части универсального решающего модуля 3, многообразие характеристик АКПА реализуется за счет замены платы ввода/вывода и коррекции программного обеспечения ПК и модуля формирования, а задача разработки АКПА для очередного варианта объекта контроля 14 сводится к корректировке программного обеспечения ПЭВМ 1, реконфигурации структуры решающего устройства на основе ПЛИС 3 и разработке специализированного модуля ввода/вывода 11.
Такой подход к построению КПА значительно сокращает время разработки и упрощает дальнейшее применение, поскольку не требуется изменять концептуальные или схемотехнические решения, выполнять разработку конструкции всего аппаратного комплекса КПА, разрабатывать программное обеспечение.
Источники информации
1. Патент РФ RU 2250565 С2.
2. Патент РФ RU 2474861 С1 – прототип.
3. Тук М.Ю. 6.2. Шина PCI // Аппаратные интерфейсы ПК. Энциклопедия. - СПб.: Питер, 2002. - 528 с.
4. Стандарт модульного измерительного оборудования PXI: PCI eXtensions for Instrumentation Tutorial [Электронный ресурс]. Режим доступа: http://www.radio-electronics.com/info/t_and_m/pxi/pxi.php, свободный.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАЗЕМНЫЙ ПУЛЬТ КОНТРОЛЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2803480C1 |
| АВТОМАТИЗИРОВАННАЯ КОНТРОЛЬНО-ПРОВЕРОЧНАЯ АППАРАТУРА ДЛЯ ПРОВЕРКИ И РЕГУЛИРОВАНИЯ ЦЕПЕЙ ЭНЕРГЕТИЧЕСКОГО И ИНФОРМАЦИОННОГО ВЗАИМОДЕЙСТВИЯ СИСТЕМЫ САМОЛЕТ - СИЛОВАЯ УСТАНОВКА | 2005 |
|
RU2294056C1 |
| АВТОМАТИЗИРОВАННАЯ КОНТРОЛЬНО-ПРОВЕРОЧНАЯ АППАРАТУРА | 2011 |
|
RU2474861C1 |
| АВТОМАТИЗИРОВАННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ЗАПРАВКОЙ КРИОГЕННОГО РАЗГОННОГО БЛОКА | 1995 |
|
RU2084011C1 |
| УПРАВЛЯЮЩАЯ ЭВМ | 2005 |
|
RU2316807C2 |
| УСТРОЙСТВО ИМИТАЦИИ КАНАЛА СПУТНИКОВОЙ СВЯЗИ С ВЫПУСКНЫМ БУКСИРУЕМЫМ АНТЕННЫМ УСТРОЙСТВОМ В ДМВ ДИАПАЗОНЕ | 2020 |
|
RU2767180C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ УПРАВЛЕНИЯ ПОДГОТОВКОЙ ДВИГАТЕЛЬНЫХ УСТАНОВОК И ТЕХНОЛОГИЧЕСКИМ ОБОРУДОВАНИЕМ РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ НА ТЕХНИЧЕСКОМ И СТАРТОВОМ КОМПЛЕКСАХ | 2015 |
|
RU2604362C1 |
| МНОГОКАНАЛЬНОЕ ПРИЕМНО-ДЕМОДУЛИРУЮЩЕЕ УСТРОЙСТВО ФАЗОМАНИПУЛИРОВАННЫХ СИГНАЛОВ СИСТЕМ СВЯЗИ | 2005 |
|
RU2305375C2 |
| СПОСОБ И УСТРОЙСТВО ОБРАБОТКИ СИГНАЛОВ ЛИНИЙ СВЯЗИ ПО МОДЕЛИ СИГНАЛА И ПЕРЕПРОГРАММИРУЕМЫМ ЭЛЕКТРИЧЕСКИМ СХЕМАМ | 2005 |
|
RU2317641C2 |
| АВТОМАТИЗИРОВАННАЯ КОНТРОЛЬНО-ПРОВЕРОЧНАЯ АППАРАТУРА ДЛЯ ПРОВЕРКИ ЦЕПЕЙ ЭНЕРГЕТИЧЕСКОГО И ИНФОРМАЦИОННОГО ВЗАИМОДЕЙСТВИЯ МНОГОКАНАЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ | 2012 |
|
RU2509371C2 |
Автоматизированная контрольно-проверочная аппаратура (АКПА) интегрированной информационно-управляющей системы беспилотного летательного аппарата содержит ПЭВМ, универсальный решающий модуль и модуль ввода-вывода. Универсальный решающий модуль содержит решающее устройство на основе программируемой логической интегральной схемы (ПЛИС), АЦП, ЦАП. Решающее устройство содержит контроллер интерфейса, устройство измерения длительностей и задержек, блок управления, коммутатор, блок имитаторов. Модуль ввода-вывода содержит блок нормализации, формирователь выходных сигналов. Обеспечивается повышение быстродействия АКПА и возможность ее реконфигурации. 2 ил.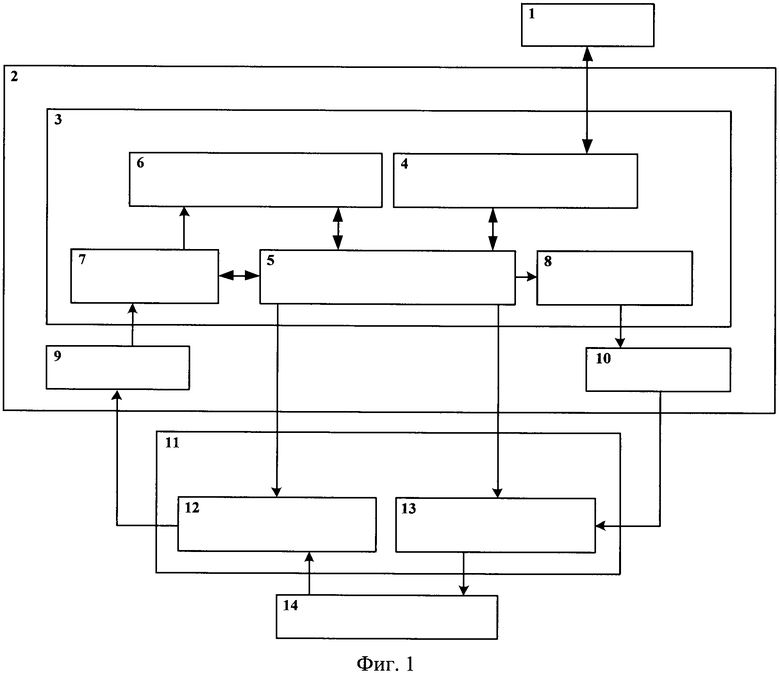
Автоматизированная контрольно-проверочная аппаратура интегрированной информационно-управляющей системы беспилотного летательного аппарата, содержащая формирователь выходных сигналов, выход которого соединен с входом объекта контроля, блок управления, соединенный с коммутатором и формирователем выходных сигналов, и блок нормализации, отличающаяся тем, что в ее состав введены ПЭВМ, контроллер интерфейса, устройство измерения длительностей и задержек, блок имитаторов, блок АЦП, блок ПАП, при этом контроллер интерфейса соединен с ПЭВМ и блоком управления, блок имитаторов соединен с блоком управления и блоком ЦАП, выход которого соединен с формирователем выходных сигналов, блок нормализации соединен с блоком управления и объектом контроля, блок АЦП соединен с блоком нормализации и коммутатором, устройство измерения длительностей и задержек соединено с коммутатором и блоком управления, при этом контроллер интерфейса, блок управления, устройство измерения длительностей и задержек, коммутатор и блок имитаторов объединены в решающее устройство на основе программируемой логической интегральной схемы (ПЛИС), блок АЦП, блок ЦАП и решающее устройство на основе ПЛИС объединены в универсальный решающий модуль, блок нормализации и формирователь выходных сигналов объединены в специализированный модуль ввода/вывода.
| ПОСАДОЧНАЯ МАШИНА | 1930 |
|
SU23004A1 |
| Устройство для определения скорости и направления ветра | 1939 |
|
SU56662A1 |
| СПОСОБ ТЕХНИЧЕСКОГО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА С ПОДДЕРЖКОЙ ПРИНЯТИЯ РЕШЕНИЙ И КОМПЛЕКС КОНТРОЛЬНО-ПРОВЕРОЧНОЙ АППАРАТУРЫ С ИНТЕЛЛЕКТУАЛЬНОЙ СИСТЕМОЙ ПОДДЕРЖКИ ПРИНЯТИЯ РЕШЕНИЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2557771C1 |
| WO 2014001799 A1, 03.01.2014 | |||
| US 9443436 B2, 13.09.2016. | |||

