Область техники, к которой относится изобретение
Настоящее изобретение относится к рулевому устройству.
Уровень техники
Рулевые устройства известны из уровня техники. Транспортное средство содержит рулевое колесо, которым манипулируют вручную. Рулевое колесо механически соединено с управляемыми колесами, имеющими сцепление с землей, чтобы обеспечить управление транспортным средством.
Известна также гидравлическая система рулевого управления, в которой рулевое колесо имеет гидравлическое соединение с управляемыми колесами транспортного средства. При возникновении в гидросистеме утечки необходимо принимать соответствующие меры предосторожности, чтобы сохранить управляемость транспортного средства. Одной из таких мер является обеспечение системы резервирования, т.е. предусмотрение двух параллельных систем рулевого управления, тогда в случае отказа одной из систем рулевого управления, другая система рулевого управления сможет управлять транспортным средством.
При нормальном функционировании транспортного средства используется заранее заданное передаточное число рулевого управления, т.е., для поворота управляемых колес из крайнего левого стопорного положения в крайнее правое стопорное положение требуется определенное число оборотов рулевого колеса.
При некоторых обстоятельствах, в частности, когда гидравлические насосы больше не в состоянии подавать жидкость под давлением, известен вариант использования системы, в которой отсутствует усиление рулевого управления. При таких условиях водителю становится труднее управлять транспортным средством, поэтому передаточное число рулевого управления устанавливается на меньшее значение, чтобы облегчить водителю управление, несмотря на то, что это потребует большего числа оборотов рулевого колеса для выполнения конкретной команды рулевого управления.
Таким образом, из уровня техники известна методика устанавливать для системы рулевого управления нормальное передаточное число рулевого управления и пониженное передаточное число рулевого управления при определенных обстоятельствах.
Некоторые транспортные средства, в частности, сельскохозяйственные машины, при выполнении определенных сельскохозяйственных операций, в частности, таких операций, как пахота или опрыскивание в поле, проходят поле, совершая по существу прямолинейное движение, но на поворотной полосе, в частности, на краю поля, указанное транспортное средство должно совершить крутой поворот и возвратиться в направлении, с которого оно только что прибыло, чтобы продолжить пахоту, опрыскивание или т.п. В таких условиях водитель должен быстро поворачивать рулевое колесо, что может быть утомительным, и/или водитель может вообще не успеть достаточно быстро повернуть рулевое колесо.
Кроме того, когда сельскохозяйственные машины выполняют сельскохозяйственные операции в поле, в частности, пахоту или опрыскивание, предпочтительно обеспечить для них автоматическую систему рулевого управления, в частности, систему GPS (Global Positioning System, глобальная навигационная система), поскольку такие автоматические системы могут быть более точными, чем ручное управление.
Краткое описание чертежей
Ниже изобретение описано более подробно на примере его частных вариантов выполнения, раскрытых со ссылкой на прилагаемые чертежи, на которых показаны:
фигура 1 - общий вид транспортного средства, содержащего рулевое устройство согласно настоящему изобретению,
фигура 2 - вариант осуществления рулевого устройства согласно настоящему изобретению,
фигуры 3 и 4 - некоторые клапаны с фигуры 2 в альтернативной позиции,
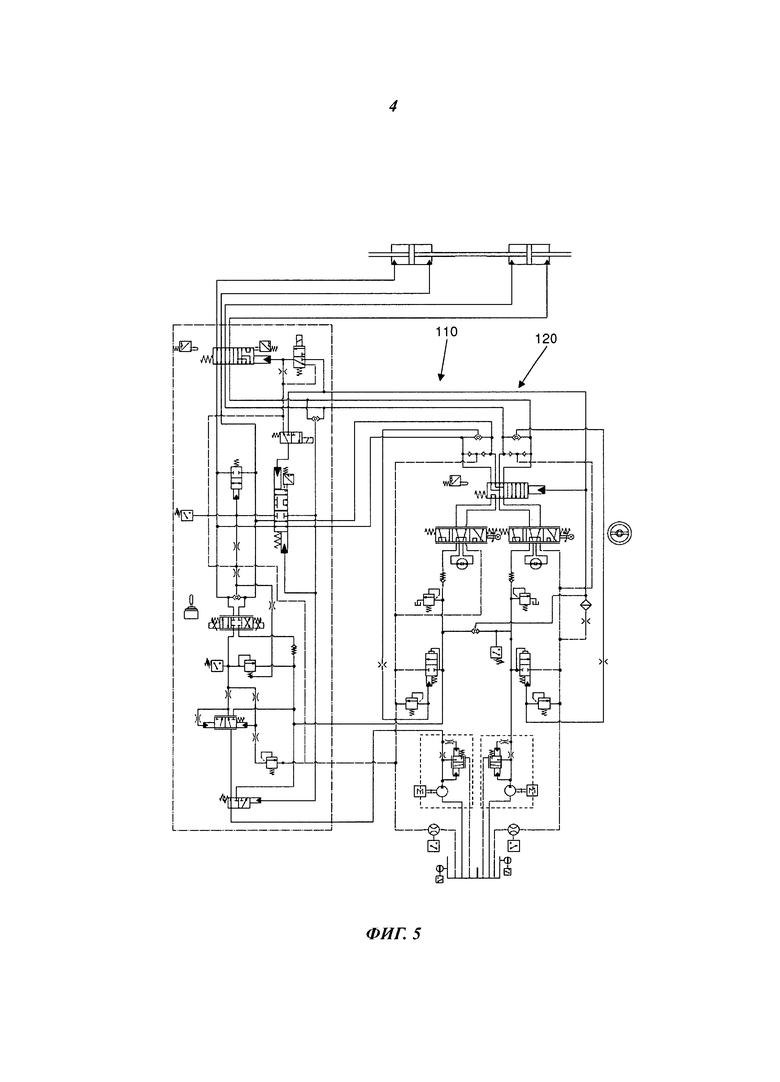
фигура 5 - еще один вариант рулевого устройства согласно настоящему изобретению,
фигуры 5А и 5B - частичные изображения с фигуры 5,
фигуры 6, 7 и 8 - клапаны с фигуры 5 в альтернативной позиции,
фигура 9 - еще один вариант рулевого устройства согласно настоящему изобретению,
фигуры 9А и 9B - частичные изображения с фигуры 9,
фигура 10 - конструкция цилиндра, которая может быть использована для настоящего изобретения,
и фигура 11 - еще один вариант цилиндра, который может быть использован в настоящем изобретении.
Осуществление изобретения
На фигуре 1 показано транспортное средство 10, содержащее рулевое устройство согласно настоящему изобретению. Транспортное средство имеет кабину 12, которая установлена на шасси 13. Транспортное средство 10 имеет передние, сцепляющиеся с землей колеса 14А и 14B, которые являются управляемыми колесами. Транспортное средство имеет также задние сцепляющиеся с землей колеса 15А и 15B. В данном случае сцепляющиеся с землей колеса 15А и 15B являются не управляемыми.
В кабине распложено рулевое колесо 11. Его можно использовать для поворота сцепляющихся с землей управляемых колес относительно по существу вертикальной оси с целью управления транспортным средством.
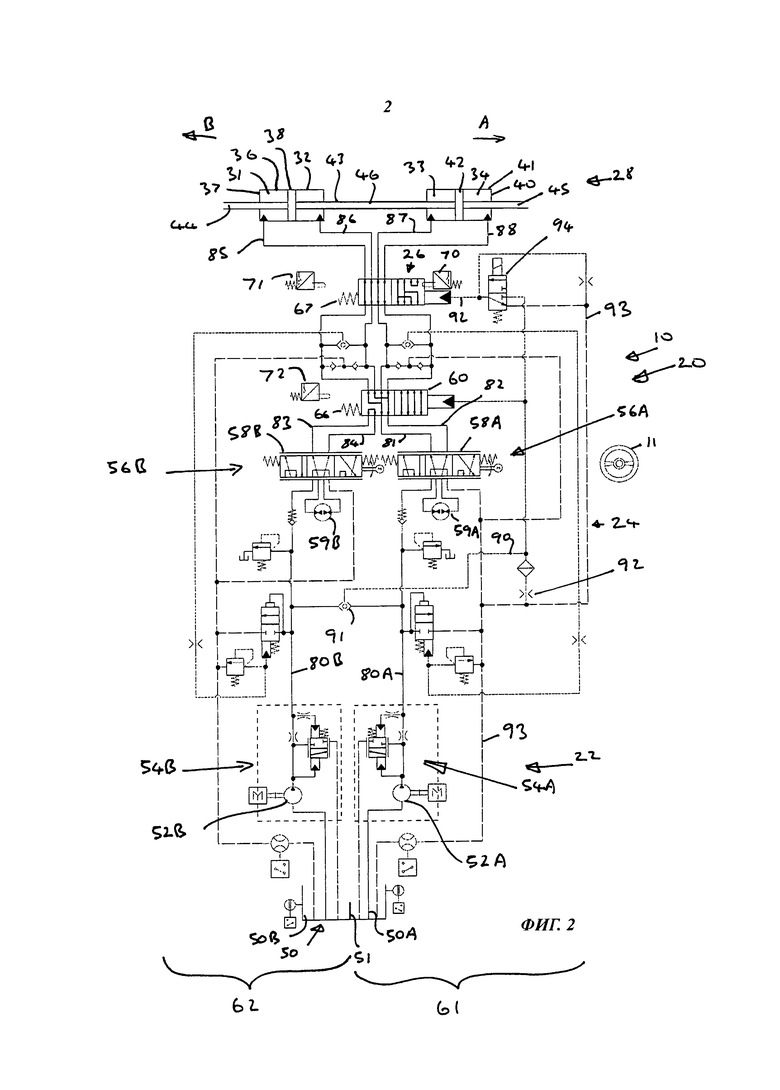
На фигуре 2 показано рулевое устройство 20. Основными компонентами системы рулевого управления являются насосная система 22, система рулевого управления 24, клапан 26 переключения передаточного числа рулевого управления и цилиндр 28 рулевого управления. Система рулевого управления содержит несколько дублирующих или "резервных" компонентов, которые служат для того, чтобы в случае отказа некоторых компонентов транспортное средство 10 оставалось управляемым.
Цилиндр 28 рулевого управления содержит первую гидравлическую напорную камеру 31, вторую гидравлическую напорную камеру 32, третью гидравлическую напорную камеру 33 и четвертую гидравлическую напорную камеру 34. Первая и вторая напорные камеры образованы как часть гидравлического цилиндра 36 двойного действия, содержащего цилиндр 37 и поршень 38. Третья и четвертая гидравлические камеры образованы как часть гидравлического цилиндра 40 двойного действия, содержащего цилиндр 41 и поршень 42. Тяга 43 соединяет поршень 38 с поршнем 42. Тяга 44 соединяет поршень 38 с рычагом рулевого управления или аналогичным элементом переднего левого колеса. Тяга 45 соединяет поршень 42 с рычагом рулевого управления или аналогичным элементом переднего правого колеса. Цилиндры 37 и 41 прикреплены к шасси/мосту или аналогичному элементу транспортного средства. Поршни 38 и 42 и тяги 43, 44 и 45 образуют поршневой/тяговый узел 46, который может перемещаться в направлении стрелки А (т.е. вправо на фигуре 2) или в направлении стрелки В (т.е. влево на фигуре 2), чтобы обеспечивать управление транспортным средством, как описано ниже.
Таким образом, подача гидравлической жидкости в первую или третью или в первую и третью гидравлические напорные камеры заставляет поршневой/тяговый узел 46 перемещаться в направлении стрелки А, поворачивая при этом транспортное средство в одном направлении. Альтернативно этому подача гидравлической жидкости во вторую или в четвертую или во вторую и в четвертую гидравлические напорные камеры заставляет поршневой/тяговый узел 46 перемещаться в направлении стрелки В, поворачивая при этом транспортное средство во втором направлении. В зависимости от конструкции соединения рычагов рулевого управления с колесами перемещение поршневого/тягового узла 46 в направлении стрелки А может вызывать поворот транспортного средства вправо или влево.
Система 20 рулевого управления содержит бак 50 для гидравлической жидкости, который разделен на первую часть 50А и вторую часть 50B перегородкой 51.
Насосная система содержит первый насос 52А и второй насос 52B. Первый насос 52А и второй насос 52B приводятся в действие двигателем М, который в данном случае представляет собой пусковой двигатель транспортного средства 10.
С первым насосом 52А соединен клапан 54А управления потоком, который регулирует поток жидкости под давлением, поступающий в систему 20 рулевого управления, при этом избыточная жидкость возвращается в бак 50 для гидравлической жидкости.
Аналогично этому со вторым насосом 52B соединен клапан 54B управления потоком, который также регулирует поток жидкости под давлением, поступающий в систему 20 рулевого управления, при этом избыточная жидкость возвращается в бак 50 для гидравлической жидкости.
Система рулевого управления 24 содержит первый блок 56А рулевого управления и второй блок 56B рулевого управления. Первый блок 56А рулевого управления состоит из первого направляющего клапана 58А в сочетании с первым дозатором 59А. Аналогично этому второй блок 56B рулевого управления состоит из второго направляющего клапана 58B в сочетании со вторым дозатором 59B. Каждый блок 56А и 56B управления может образовывать гидравлический мотор системы рулевого управления. Такие гидравлические моторы хорошо известны специалистам в данной области техники, они позволяют подавать дозированные количества гидравлической жидкости в рулевые цилиндры, чтобы направлять транспортное средство соответственно вправо или влево.
Рулевое колесо 11 соединяется с обоими блоками 56А и 56B управления, при этом поворот рулевого колеса вправо заставляет первый и второй блоки 56А и 56B управления направлять гидравлическую жидкость в соответствующие гидравлические напорные камеры, таким образом, транспортное средство направляется вправо, а поворот рулевого колеса влево заставляет первый и второй блоки 56А и 56B управления направлять гидравлическую жидкость в соответствующие гидравлические напорные камеры, таким образом, транспортное средство направляется влево, как более подробно описано ниже.
Общее функционирование системы рулевого управления осуществляется следующим образом:
Нормальное функционирование
Первый насос 52А предназначен для отбора гидравлической жидкости из первой части 50А бака 50 для гидравлической жидкости и подачи ее в виде жидкости под давлением в первый блок 56А рулевого управления. В зависимости от команды системы рулевого управления, подаваемой рулевым колесом, первый блок рулевого управления будет подавать гидравлическую жидкость либо в третью гидравлическую напорную камеру 33, если необходимо повернуть транспортное средство в первом направлении, либо в четвертую гидравлическую напорную камеру 34, если необходимо повернуть транспортное средство во втором направлении, или предотвратит поступление жидкости в третью или четвертую гидравлическую напорную камеру, если необходимо сохранять текущую настройку системы рулевого управления.
Аналогично этому второй насос 52B предназначен для отбора гидравлической жидкости из второй части 50B бака 50 для гидравлической жидкости и подачи жидкости под давлением во второй блок 56B рулевого управления. Как указано выше, второй блок 56B рулевого управления соединяется с первым блоком 56А рулевого управления (и с рулевым колесом). Поэтому первый и второй блоки рулевого управления работают во взаимодействии, и второй блок рулевого управления подает жидкость под давлением либо в первую гидравлическую напорную камеру, либо во вторую гидравлическую напорную камеру, либо прекращает подачу гидравлической жидкости в первую или во вторую гидравлическую напорную камеру, в зависимости от команды системы рулевого управления.
Таким образом, первая часть 50А бака 50 для гидравлической жидкости, первый насос 52А, первый блок 56А рулевого управления и гидравлический цилиндр 40 двойного действия образуют первую систему 61 рулевого управления, а вторая часть 50B бака 50 для гидравлической жидкости, второй насос 52B, второй блок 56B рулевого управления и гидравлический цилиндр 36 двойного действия образуют вторую систему 62 рулевого управления. При этом следует понимать, что первая система 61 рулевого управления вместе со второй системой 62 рулевого управления образуют дублирующую систему или резервирующую систему. При этом в случае отказа некоторых компонентов первой системы 61 рулевого управления транспортным средством можно будет управлять при помощи второй системы 62 рулевого управления, и, аналогично, в случае отказа некоторых компонентов второй системы 62 рулевого управления транспортным средством можно будет управлять при помощи первой системы 61 рулевого управления.
Функционирование после отказа насосов
Система рулевого управления содержит также клапан 60, функционирование которого описано в одновременно поданной настоящим заявителем Европейской заявке на изобретение №08154567.5, содержание которой включено в данное описание посредством ссылки.
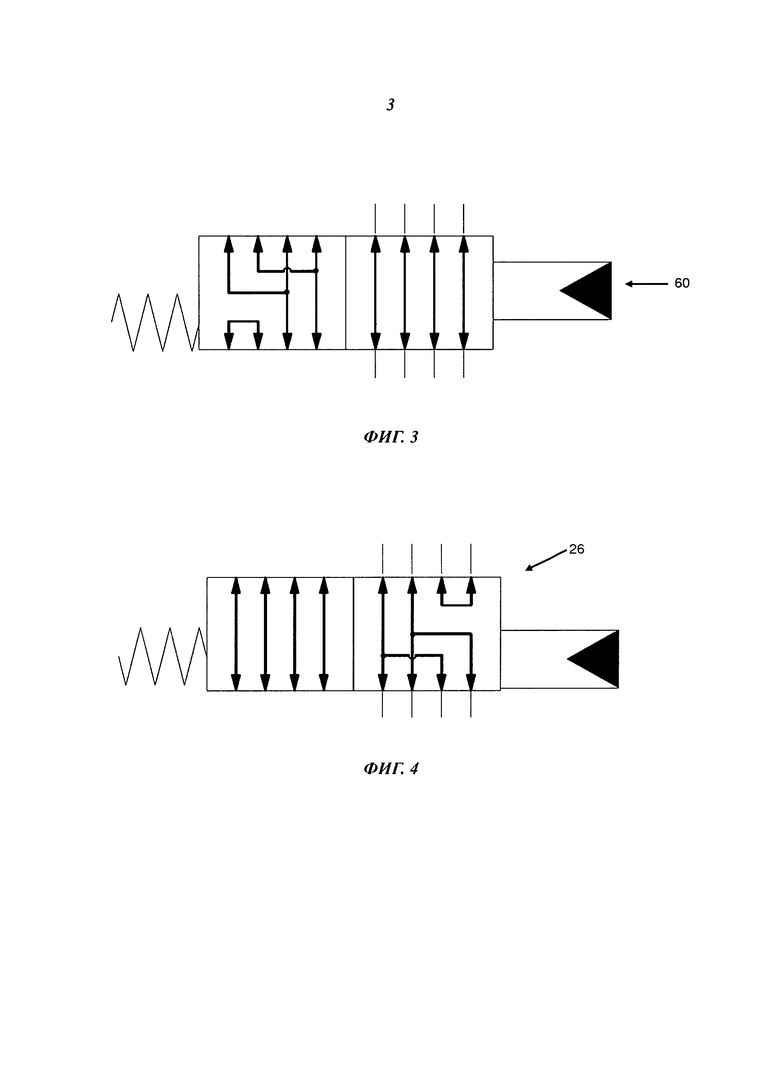
Клапан 60 представляет собой двухпозиционный клапан, который смещен в показанную на фиг. 2 позицию под действием пружины 66, когда транспортное средство не используется. При включении пускового двигателя М транспортного средства, первый и второй насосы создают гидравлическое давление в гидравлических трубопроводах 80А и 80B. Это, в свою очередь, создает гидравлическое давление в гидравлической линии 90 управления при помощи маятникового клапана 91. Отверстие 92 поддерживает давление в гидравлической линии 90 управления таким образом, чтобы клапан 66 перемещался в позицию, показанную на фигуре 3. При таких обстоятельствах (и с клапаном 26 переключения передаточного числа рулевого управления в позиции, показанной на фигуре 2) можно видеть, что первый блок 56А рулевого управления подает гидравлическую жидкость в гидравлический цилиндр 40 двойного действия, а второй блок 56B рулевого управления подает, соответственно, гидравлическую жидкость в гидравлический цилиндр 36 двойного действия в зависимости от команды системы рулевого управления.
В том случае, если, как первый, так и второй насосы не могут подавать гидравлическую жидкость, давление в трубопроводах 80А и 80B будет падать до нуля и, следовательно, давление в гидравлической линии 90 управления также будет падать до нуля, поскольку гидравлическая жидкость будет проходить через отверстие 92 и возвращаться по сливному трубопроводу 93 в бак для гидравлической жидкости. При таких обстоятельствах клапан 60 под действием пружины 66 переместится в позицию, показанную на фигуре 2. Таким образом, указанный клапан заставляет выходной поток (содержащийся в одном из гидравлических трубопроводов 81 и 82) первого блока 56А рулевого управления поступать в гидравлический цилиндр 36 двойного действия и гидравлический цилиндр 40 двойного действия. Этот выходной поток создается не первым и вторым насосами, а генерируется водителем, который поворачивает рулевое колесо, в свою очередь, поворачивающее дозатор 59А, создающий указанный поток. Поскольку выходной поток из дозатора 59А подается в два гидравлических цилиндра, рулевое колесо приходится поворачивать в два раза больше, чтобы получить такое же изменение направления поворота, как в случае работы насосов и нахождения клапана 60 в позиции, показанной на фигуре 3. Таким образом, передаточное число рулевого управления, т.е. угол поворота передних сцепляющихся с землей колес транспортного средства, деленный на угол поворота рулевого колеса, меньше в том случае, когда клапан 60 находится в позиции, показанной на фигуре 2, чем в том случае, когда клапан 60 находится в позиции, показанной на фигуре 3. Так, например, в одном варианте осуществления, когда клапан находится в позиции, показанной на фигуре 3, может потребоваться четыре оборота рулевого колеса для поворота сцепляющихся с землей колес "от упора до упора" (т.е. из крайнего правого стопорного положения в крайнее левое стопорное положение или наоборот). Однако если клапан 60 находится в позиции, показанной на фигуре 2, для поворота от упора до упора может потребоваться 8 оборотов рулевого колеса. Это является предпочтительным, поскольку для поворота от упора до упора с клапаном, который находится в позиции, показанной на фигуре 2, требуется меньшая сила, и поскольку эта сила создается водителем, у водителя появляется больше возможностей для управления транспортным средством.
Если подытожить, то при нормальном функционировании во время эксплуатации транспортного средства клапан 60 будет находиться в позиции, показанной на фигуре 3 и только в исключительных случаях, если таковые возникнут, клапан 60 будет находиться в позиции, показанной на фигуре 2.
Таким образом, при нормальных условиях в вышеуказанном примере потребуется четыре оборота рулевого колеса, чтобы совершить поворот от упора до упора.
Быстродействующее управление
В общих чертах, клапан 26 переключения передаточного числа рулевого управления позволяет селективно изменять нормальное передаточное число рулевого управления (в вышеприведенном примере четыре оборота от упора до упора) на более высокое отношение (например, два оборота от упора до упора).
Более подробно, клапан 26 переключения передаточного числа рулевого управления, находясь в позиции, показанной на фигуре 2, обеспечивает, например, четыре оборота от упора до упора.
Однако клапан 26 можно переместить в позицию, показанную на фигуре 4, при этом в данном случае потребуется, например, только 2 оборота от упора до упора.
Более подробно, клапан 26 переключения представляет собой золотниковый клапан, который под действием пружины 67 смещен в позицию, показанную на фигуре 2, но который может быть перемещен в позицию, показанную на фигуре 4, при приложении управляющего давления в гидравлической линии 92 управления. Как показано на фигуре 2, во время эксплуатации транспортного средства давление в гидравлической линии 92 управления падает до нуля вследствие ее соединения со сливным трубопроводом 93. При необходимости получения более высокого передаточного числа рулевого управления водитель может использовать переключатель или аналогичный элемент (не показан), подключенный к разгрузочному клапану 94 рулевого управления (который представляет собой соленоидный клапан), чтобы соединить гидравлическую линию 90 управления с гидравлической линией 92 управления. При этом гидравлическая линия 92 управления будет находиться под давлением (поскольку гидравлическая линия 90 управления находится под давлением, как описано выше), заставляя клапан 26 переключения передаточного числа рулевого управления перемещаться в позицию, показанную на фигуре 4. При таких обстоятельствах выходной поток из блока 56А рулевого управления (по гидравлическим трубопроводам 81 или 82) и выходной поток из блока 56B рулевого управления (по гидравлическим трубопроводам 83 или 84) будут направлены в трубопроводы 85 и 86 гидравлического цилиндра 36 двойного действия. Важно отметить, что ни один из выходных потоков из первого и второго блоков 56 рулевого управления не будет направлен к гидравлическому цилиндру 40 двойного действия. Вместо этого трубопроводы 87 и 88, связанные с гидравлическим цилиндром 40 двойного действия, соединяются вместе при помощи клапана 26, когда он находится в позиции, показанной на фигуре 4. Поскольку выходные потоки из обоих блоков 56А и 56B управления направляются к одному гидравлическому цилиндру двойного действия (гидравлический цилиндр 36), это приводит в результате к увеличению передаточного числа рулевого управления. Важно отметить, что другой гидравлический цилиндр двойного действия (гидравлический цилиндр 40) находится в плавающем режиме, т.е. поршень 42 неограничен в движении и может свободно перемещаться в направлении стрелки А или стрелки В под действием поршня 38.
Датчик в виде переключателя 70 определяет, когда клапан 26 находится в позиции, показанной на фигуре 2, а датчик в виде переключателя 71 определяет, когда клапан 26 находится в позиции, показанной на фигуре 4. Датчик в виде переключателя 72 определяет, когда клапан 60 находится в позиции, показанной на фигуре 3. Это предусмотрено в целях проверки безопасности.
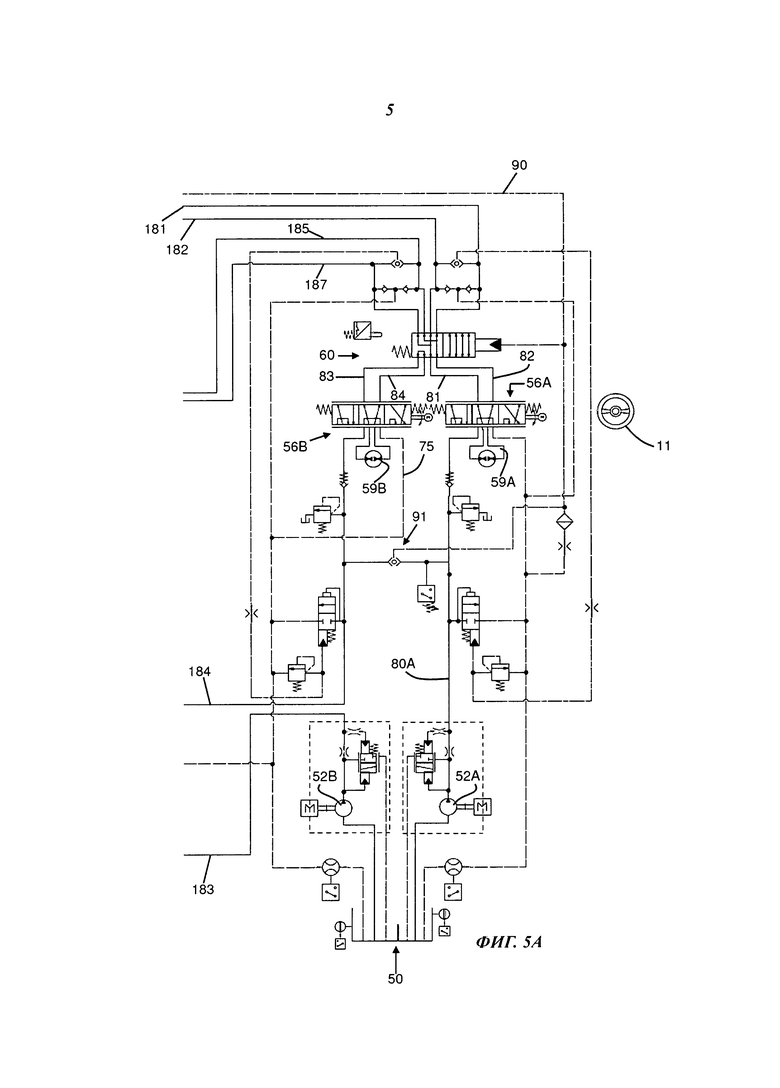
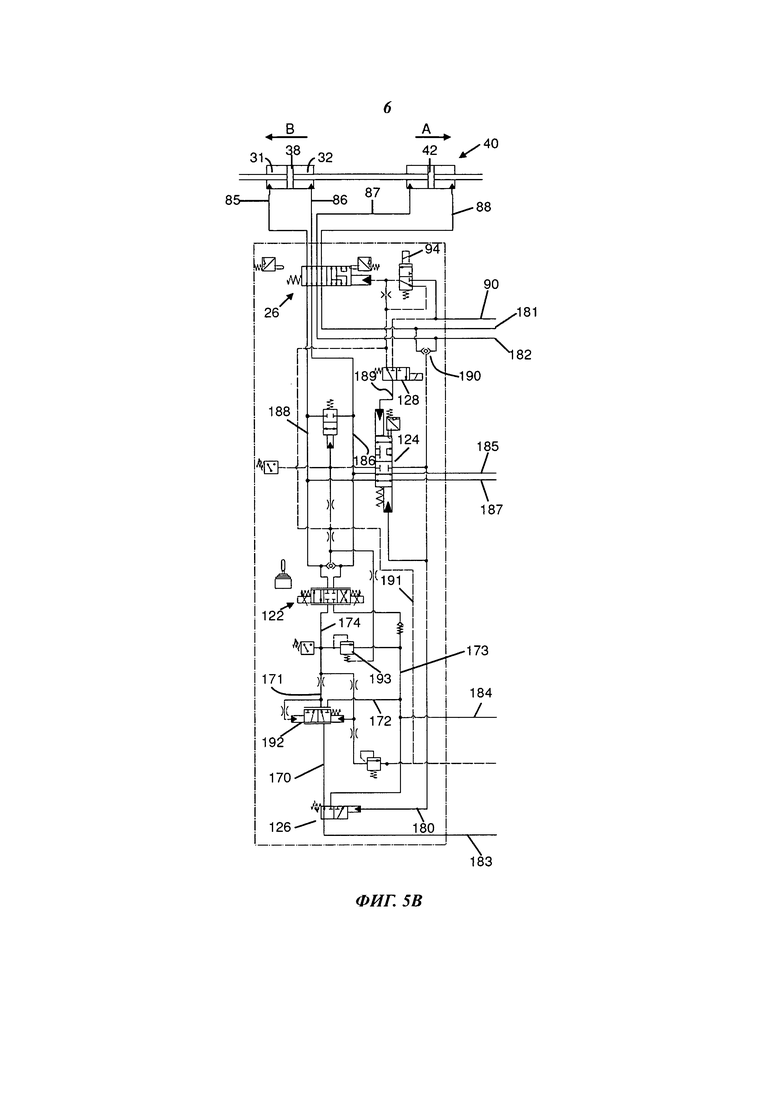
На фигуре 5 показан вариант 120 исполнения системы 20 рулевого управления. Компоненты систем 120 и 20 рулевого управления, которые выполняют одну и ту же функцию, обозначены одинаковыми ссылочными номерами. Система 120 рулевого управления установлена на транспортном средстве 110.
Говоря в общих чертах, систему 120 рулевого управления можно использовать одним из двух способов. Во-первых, системой 120 рулевого управления может управлять водитель, поворачивая рулевое колесо 11. Работа системы в этом случае описана выше применительно к системе 20 рулевого управления. Во-вторых, системой 120 рулевого управления можно управлять автоматически при помощи автоматической системы рулевого управления, в частности, GPS-системы рулевого управления. В этом случае клапан 122 рулевого управления системы GPS может иметь автоматическое управление для обеспечения управления транспортным средством.
Система 120 рулевого управления может селективно переключаться между управлением водителем (ручное рулевое управление) и автоматическим рулевым управлением (рулевое управление при помощи системы GPS) путем переключения золотникового клапана 124 выбора системы рулевого управления GPS.
Более подробно:
Нормальный режим рулевого управления
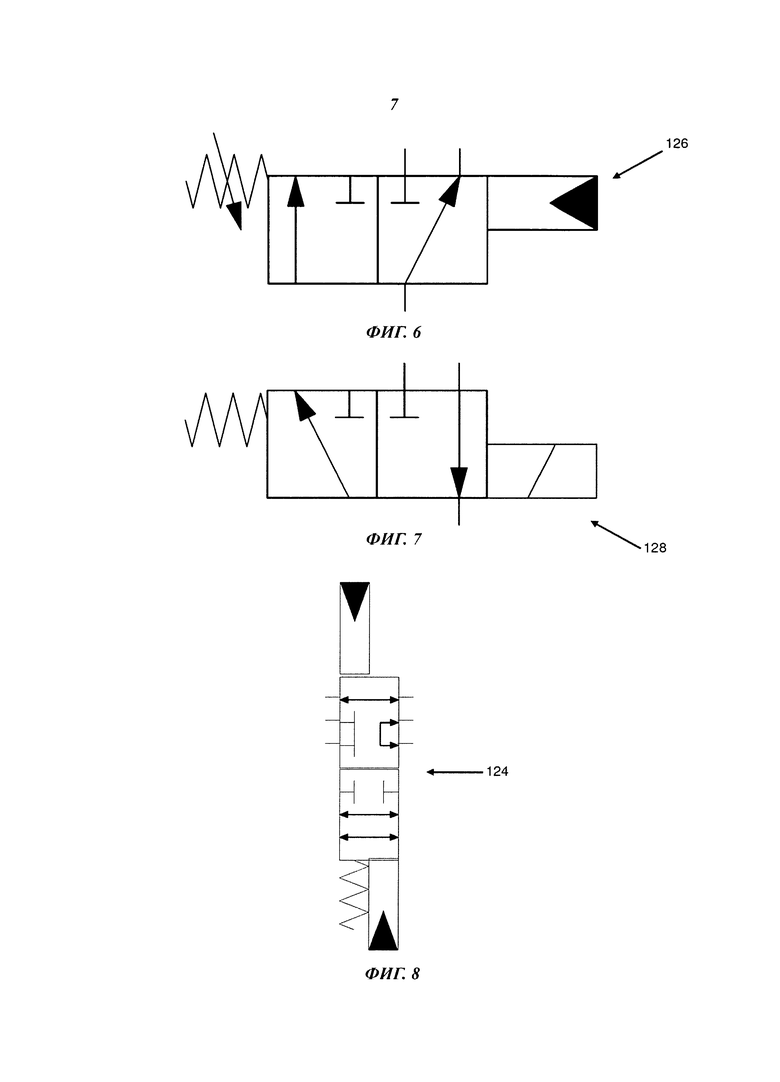
При эксплуатации транспортного средства 110 в нормальном режиме рулевого управления золотниковый клапан 124 выбора рулевого управления системы GPS находится в позиции, показанной на фигуре 5. Предохранительный отсечной клапан 126 рулевого управления системы GPS находится в позиции, показанной на фигуре 5. Соответственно, жидкость под давлением из насоса 52B будет проходить в трубопровод 183 через предохранительный отсечной клапан 126 рулевого управления системы GPS, затем в трубопровод 170 и далее к регулятору 192 расхода рулевого управления системы GPS.
Регулятор 192 расхода рулевого управления системы GPS представляет собой пропорциональный клапан и, соответственно, соединяет трубопровод 170 с одним или другим или обоими гидравлическими трубопроводами 171 или 172. Гидравлическая жидкость, проходящая по трубопроводу 172, будет поступать в трубопровод 184 и далее во второй блок 56B рулевого управления. Гидравлическая жидкость, проходящая по трубопроводу 171, не сможет проходить через клапан 122 рулевого управления системы GPS и поэтому будет проходить через клапан 193 нейтральной цепи рулевого управления системы GPS в трубопровод 173, а затем по трубопроводу 184 во второй блок 56B рулевого управления. Соответственно, во второй блок 56B рулевого управления подается жидкость под давлением из второго насоса 52B аналогично системе 20 рулевого управления, хотя эта жидкость под давлением не проходит через предохранительный отсечной клапан 126 рулевого управления системы GPS и регулятор 192 расхода рулевого управления системы GPS, и некоторая часть жидкости проходит через клапан 193 нейтральной цепи рулевого управления системы GPS.
Гидравлические трубопроводы 81 и 82 системы 120 рулевого управления соединяются с гидравлическими трубопроводами 87 и 88, соответственно, аналогично системе 20 рулевого управления (когда клапан 60 находится в позиции, показанной на фигуре 3, а клапан 26 находится в позиции, показанной на фигуре 5). Трубопровод 84 соединяется с трубопроводом 185 (когда клапан 60 находится в позиции, показанной на фигуре 3), который, в свою очередь, соединяется с трубопроводом 186 (при помощи золотникового клапана 124 выбора системы рулевого управления GPS, когда он находится в позиции, показанной на фигуре 5), который далее соединяется с трубопроводом 86 (когда клапан 26 переключения передаточного числа рулевого управления находится в позиции, показанной на фигуре 5). Соответственно, трубопровод 84 системы 120 рулевого управления соединяется с трубопроводом 86 аналогично системе 20 рулевого управления, однако, при помощи золотникового клапана выбора системы рулевого управления GPS. Аналогично этому трубопровод 83 соединяется с трубопроводом 187 (когда клапан 60 находится в позиции, показанной на фигуре 3), который, в свою очередь, соединяется с трубопроводом 188 (при помощи золотникового клапана 124 выбора системы рулевого управления GPS, когда он находится в позиции, показанной на фигуре 5), который далее соединяется с трубопроводом 85 (когда клапан 26 переключения передаточного числа рулевого управления находится в позиции, показанной на фигуре 5). Соответственно, трубопровод 83 системы 120 рулевого управления соединяется с трубопроводом 85 аналогично системе 20 рулевого управления, однако, при помощи золотникового клапана 124 выбора системы рулевого управления GPS. При этом следует понимать, что соединения между насосами 52А и 52B, блоками рулевого управления 52А и 52B и гидравлическими цилиндрами 36 и 40, как показано в системе 120 рулевого управления, в нормальном режиме управления функционально эквивалентны соединениям этих компонентов в системе 20 рулевого управления, когда она работает в нормальном режиме управления. Соответственно, управление системой 120 рулевого управления в ее нормальном режиме соответствует описанному выше управлению системой 20 рулевого управления в нормальном режиме.
Автоматическое рулевое управление
Когда требуется автоматическое рулевое управление, водитель включает переключатель или аналогичный элемент (не показан), соединенный с соленоидным клапаном 128, при этом клапан 128 перемещается в позицию, показанную на фигуре 7, в результате чего давление из гидравлического трубопровода 90 передается в гидравлическую линию 189 управления, что, в свою очередь, заставляет золотниковый клапан 124 выбора системы рулевого управления GPS перемещаться в позицию, показанную на фигуре 8. При его нахождении в этой позиции поток рулевого управления, направленный в гидравлические трубопроводы 85 и 86 и из них, проходит через клапан 122 рулевого управления системы GPS. Клапан 122 рулевого управления системы GPS представляет собой пропорциональный клапан, которым управляет система рулевого управления GPS, которая автоматически определяет, куда следует повернуть транспортное средство. Такие системы рулевого управления GPS известны из уровня техники и используются, например, во время пахоты поля или при выполнении других сельскохозяйственных операций в поле, в частности, опрыскивания. Такие системы рулевого управления GPS могут обеспечивать большую точность, чем ручное рулевое управление транспортным средством, и, таким образом, предотвращают, например, проведение пахоты или опрыскивания дважды на одной части поля, в то время как другая часть поля остается невспаханной или неопрысканной. Кроме того, такие автоматические системы рулевого управления помогают уменьшить утомляемость водителя.
В зависимости от команды системы рулевого управления клапан 122 рулевого управления системы GPS направляет жидкость под давлением из гидравлического трубопровода 174 в трубопровод 188, в трубопровод 85 и в первую гидравлическую напорную камеру 31 для обеспечения ведения транспортного средства в первом направлении, или клапан рулевого управления системы GPS направляет жидкость под давлением в трубопровод 186, а затем в трубопровод 86 и во вторую гидравлическую напорную камеру 32, чтобы обеспечить ведение транспортного средства во втором направлении, или, при отсутствии команды системы рулевого управления клапан 122 рулевого управления системы GPS будет расположен, как показано на фигуре 5, сохраняя, таким образом, существующую позицию рулевого управления. При этом следует понимать, что если жидкость под давлением поступает в первую гидравлическую напорную камеру, жидкость из второй гидравлической напорной камеры 32 возвращается в бак для гидравлической жидкости по гидравлическому трубопроводу 86, гидравлическому трубопроводу 186, через клапан 122 рулевого управления системы GPS, по гидравлическим трубопроводам 173 и 184, через второй блок 56B рулевого управления, по трубопроводу 83, через клапан 60 (который находится в позиции, показанной на фигуре 3), по трубопроводу 187, через золотниковый клапан 124 выбора системы рулевого управления GPS, который находится в позиции, показанной на фигуре 8, по трубопроводу 185, через клапан 60, который находится в позиции, показанной на фигуре 3, через второй блок 56 рулевого управления в бак по сливному трубопроводу 75. Аналогично этому, если клапан 122 рулевого управления системы GPS подает жидкость под давлением во вторую гидравлическую напорную камеру 32, то гидравлическая жидкость, выходящая из первой гидравлической напорной камеры 31, будет возвращаться в бак для гидравлической жидкости по аналогичному пути.
Поскольку поршень 38 будет перемещаться в направлении стрелки А или стрелки В при переключении клапана 122 рулевого управления системы GPS, то поршень 42, в свою очередь, будет аналогично перемещаться в направлении стрелки А или стрелки В, соответственно. Это приведет к созданию потока гидравлической жидкости в трубопроводах 87 и 88, который вызовет поток жидкости в трубопроводах 81 и 82 и, следовательно, в блоке 59А рулевого управления, что заставит поворачиваться блок рулевого управления, и, соответственно, приведет к повороту рулевого колеса 11. Поскольку блок 59А рулевого управления и рулевое колесо 11 поворачиваются, то аналогично этому будет поворачиваться блок 59B рулевого управления. Это приведет к появлению вышеуказанного обратного потока в трубопроводах 83 и 84.
Таким образом, при рулевом управлении в автоматическом режиме насос 52B подает гидравлическую жидкость к клапану 122 рулевого управления системы GPS. Далее клапан 122 рулевого управления системы GRS направляет гидравлическую жидкость в первую или во вторую гидравлические напорные камеры 31 и 32 или не направляет ее ни в одну из камер и при этом направляет обратный поток из первой или второй гидравлической напорной камеры в бак 50 для гидравлической жидкости. Поскольку поршень 38 перемещается в направлении стрелки А или стрелки В, то поршень 42, в свою очередь, перемещается аналогично этому, что вызывает появление потока, который проходит через дозатор 59А и заставляет поворачиваться рулевое колесо. Поворот дозатора 59А и рулевого колеса 11 вызывает поворот дозатора 59B, который возможен, благодаря выходному потоку из трубопроводов 83 и 84, соединяющимся вместе у золотникового клапана 124 выбора системы рулевого управления GPS, который находится в позиции, показанной на фигуре 8.
Поток из насоса 52А измеряется первым дозатором 59А, когда он поворачивается в результате команды системы рулевого управления.
Функционирование после отказа насосов
Система 120 рулевого управления функционирует аналогично системе 20 рулевого управления в случае, когда ни первый, ни второй насос не могут подавать гидравлическую жидкость. Вкратце, при таких обстоятельствах клапан 60 перемещается из позиции, показанной на фигуре 3, в позицию, показанную на фигуре 2, что приводит к уменьшению передаточного числа рулевого управления.
Быстродействующее рулевое управление
В режиме быстродействующего рулевого управления система 120 рулевого управления функционирует аналогично системе 20 рулевого управления. При этом в режиме быстродействующего рулевого управления клапан 26 переключения передаточного числа рулевого управления перемещается из позиции, показанной на фигуре 5, в позицию, показанную на фигуре 4, что приводит к увеличению передаточного числа рулевого управления.
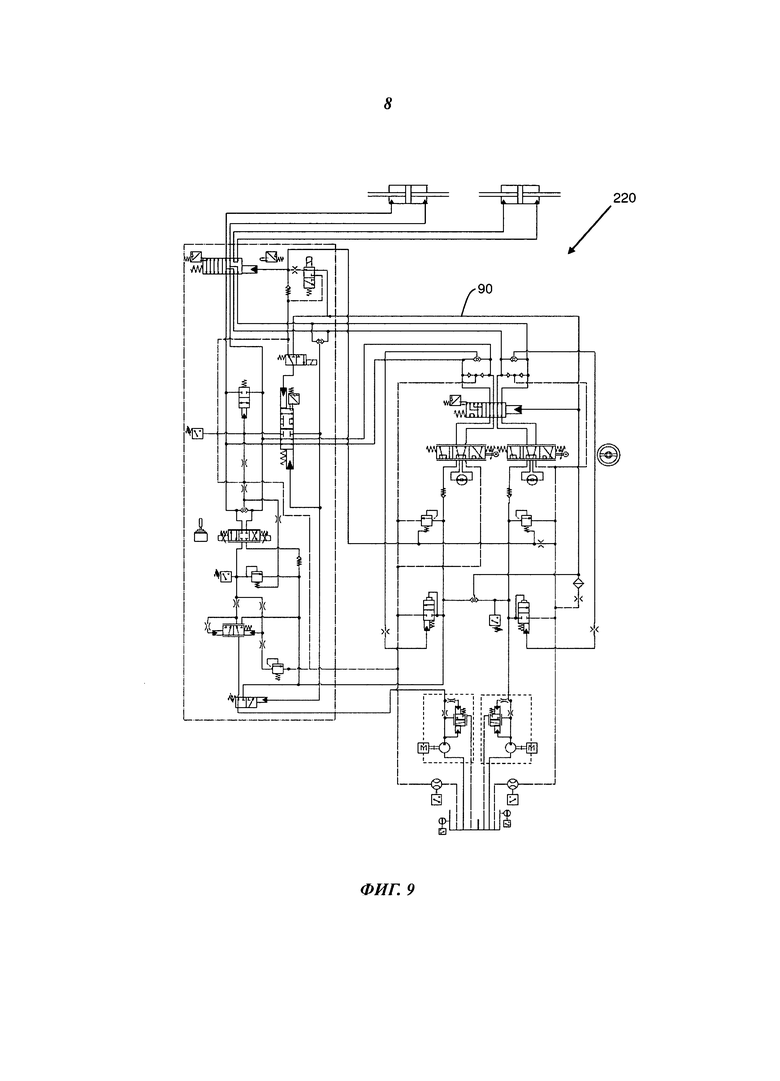
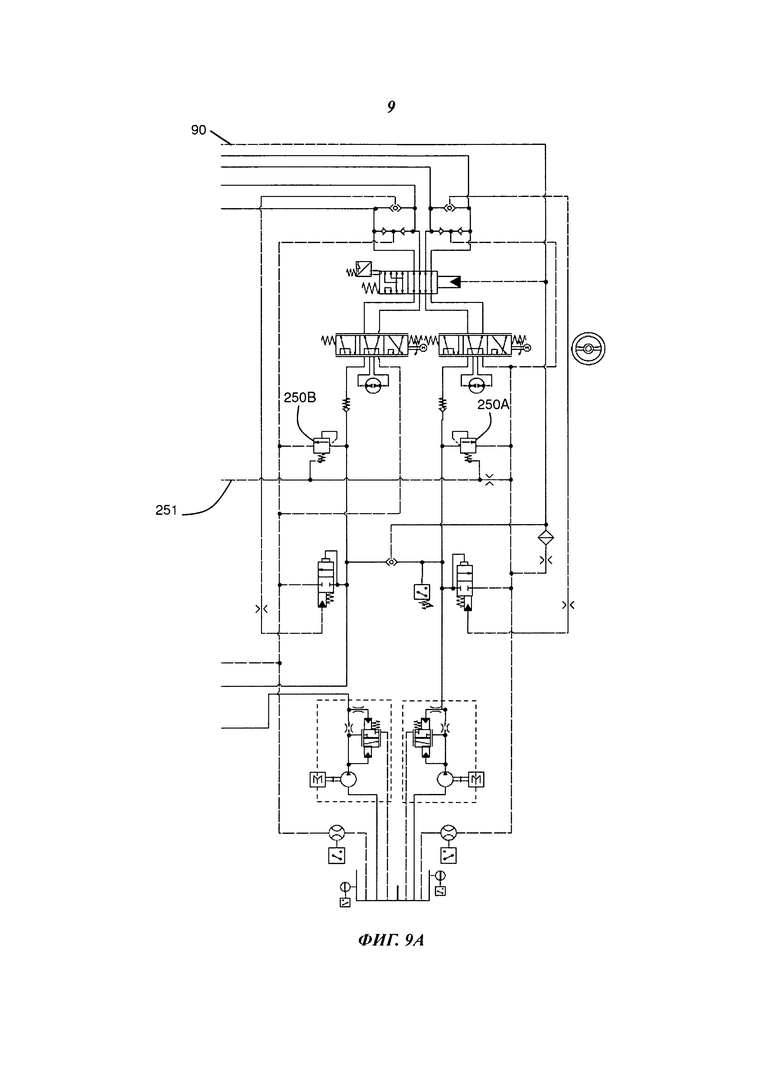
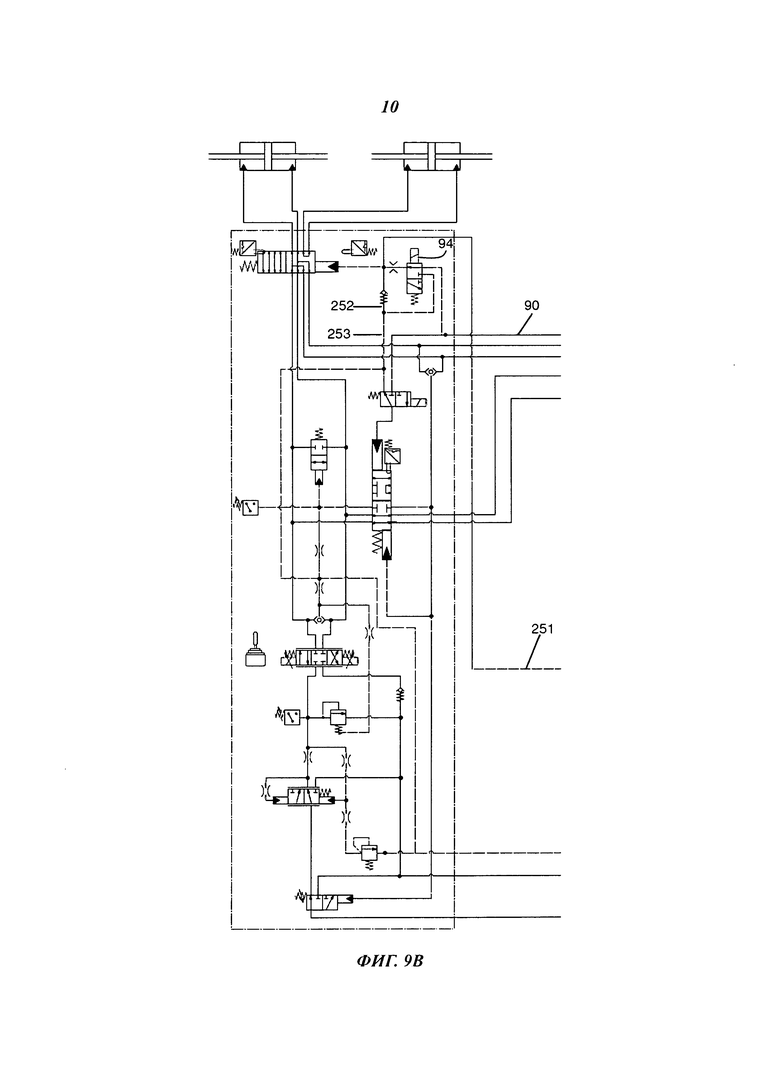
На фигуре 9 показано рулевое устройство 220, которое представляет собой вариант исполнения системы 120 рулевого управления. Компоненты рулевого устройства 220, которые функционируют аналогично соответствующим компонентам системы 120 рулевого управления, обозначены идентичными ссылочными номерами. Рулевое устройство 220 содержит первый и второй предохранительные клапаны 250А и 250B последовательности. Эти клапаны соединяются при помощи гидравлической линии 251 управления с обратным клапаном 252.
При этом предохранительные клапаны 250А и 250B последовательности в сочетании с обратным клапаном 252 позволяют повышать давление, используемое для управления транспортным средством, в режиме быстродействующего рулевого управления по сравнению с нормальным режимом управления. Это повышение давления может быть предпочтительным для компенсации эффективного уменьшения давления в области поршня во время эксплуатации в этом режиме.
В нормальном режиме управления клапан 94 переключения режима рулевого управления, показанный на фигуре 9, находится в позиции клапана 94 переключения режима рулевого управления, показанной на фигуре 2, поэтому гидравлическая линия 251 управления соединяется со сливным трубопроводом 253, давление в трубопроводе 251 отсутствует, а предохранительные клапаны 250А и 250B последовательности открываются в одном примере под давлением 100 бар. Однако когда выбран режим быстродействующего рулевого управления, и клапан 94 переключения режима рулевого управления из позиции, показанной на фигуре 9, перемещается в позицию, показанную на фигуре 9, гидравлическая линия 90 управления будет повышать давление в трубопроводе 251, но только до давления срабатывания обратного клапана 252, составляющего одном примере 60 бар. Таким образом, давление 60 бар в трубопроводе 252 прикладывается к пружинам предохранительных клапанов 250А и 250B последовательности, что приводит к повышению разгрузочного давления, в данном примере - 160 бар для предохранительных клапанов 250А и 250B последовательности.
Как показано на фигуре 2, первая и вторая гидравлические напорные камеры находятся внутри гидравлического цилиндра 36 двойного действия, а третья и четвертая гидравлические камеры - внутри гидравлического цилиндра 40 двойного действия. В этом примере тяга 43 используется, как в гидравлическом цилиндре 36 двойного действия, так и в гидравлическом цилиндре 40 двойного действия. В других вариантах осуществления тяга 43 может состоять из двух частей, при этом одна часть используется в гидравлическом цилиндре 36 двойного действия, а вторая часть - в гидравлическом цилиндре 40 двойного действия, при этом указанные две части представляют собой отдельные части, которые в рабочем положении соединяются вместе. В одном примере, в котором тяга 43 может состоять из двух отдельных частей, каждая часть может быть соединена с соответствующим рычагом рулевого управления, при этом два рычага рулевого управления, в свою очередь, соединяются вместе при помощи рулевой тяги.
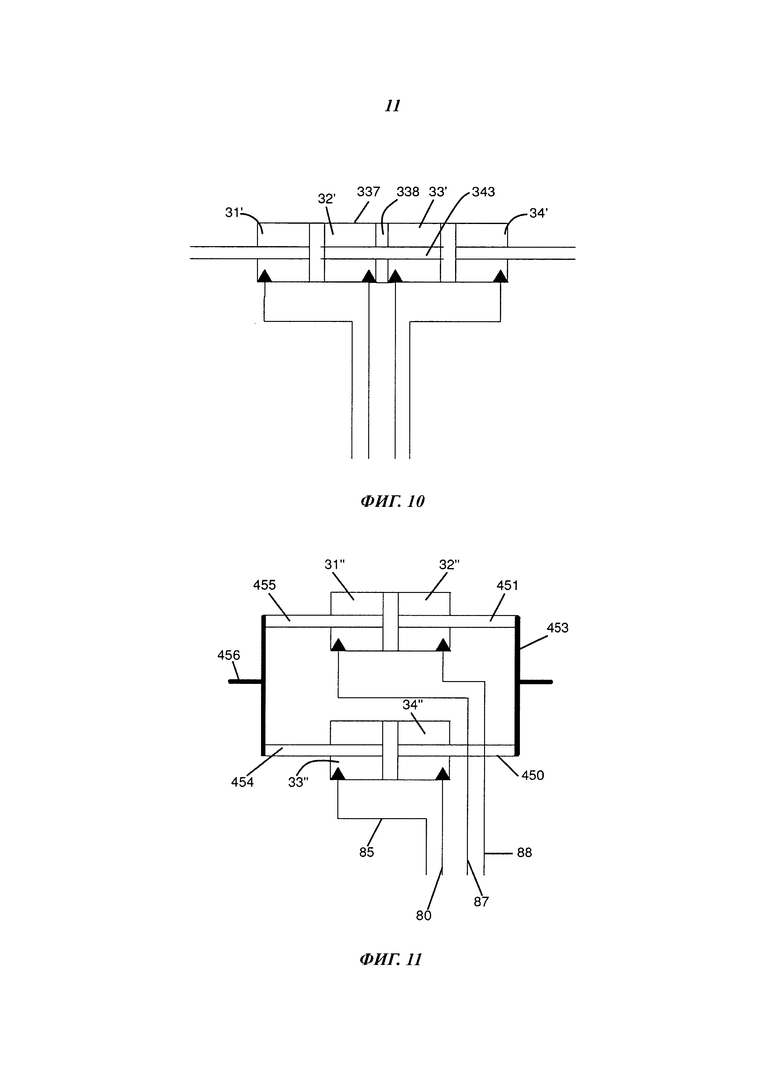
На фигуре 10 показан вариант изобретения, характеризующийся тем, что первая гидравлическая напорная камера 31', вторая гидравлическая напорная камера 32', третья гидравлическая напорная камера 33' и четвертая гидравлическая напорная камера 34' расположены в одном цилиндре 337. Стенка (или центральная уплотнительная прокладка) 338 отделяет вторую гидравлическую напорную камеру 32' от третьей гидравлической напорной камеры 33', при этом соответствующие уплотнения окружают тягу 343.
Как показано на фигуре 2 и фигуре 10, первая, вторая, третья и четвертая гидравлические напорные камеры расположены последовательно. На фигуре 11 показана конструкция, в которой первая и вторая гидравлические напорные камеры 31ʺ и 32ʺ установлены параллельно третьей и четвертой гидравлическим напорным камерам 33ʺ и 34ʺ. Тяга 450 и тяга 451 соединяются муфтой 453 (показанной схематически). Аналогично этому тяга 454 и тяга 455 соединяются муфтой 456 (показанной схематической). Муфты 453 и 456 соединяются соответствующим тяговым устройством с управляемыми сцепляющимися с землей колесами или аналогичными элементами.
Изобретение описано применительно к транспортному средству с управляемыми передними колесами. Однако изобретение может быть в равной степени использовано для транспортных средств, в которых управляемыми являются задние колеса, или альтернативно к транспортным средствам, которые имеют рулевое управление с разрезной поперечной рулевой штангой (известное также как рулевое управление с расчлененной трапецией).
Как описано выше, тяги 43, 44 и 45 представлены как отдельные тяги. Эти тяги можно соединить пригодным устройством друг с другом или с соответствующим поршнем. Соединительное устройство может представлять собой резьбовое соединение. При этом в других вариантах осуществления тяги 43 и 44 могут представлять собой одну объединенную тягу, тяги 44 и 45 могут представлять собой одну объединенную тягу или тяги 43, 44 и 45 могут представлять собой одну объединенную тягу.
Как описано выше, двигатель М представляет собой пусковой двигатель транспортного средства, например, дизельный двигатель. При этом следует понимать, что может быть использован пусковой двигатель любого типа. Пусковой двигатель может приводить в действие насос при помощи коробки переключения передач или аналогичного элемента. Однако в других вариантах изобретения могут быть использованы другие типы пускового двигателя, отличные от двигателя внутреннего сгорания, в частности, дизельный двигатель.
В одном аспекте настоящего изобретения используется автоматическая система рулевого управления, например, система рулевого управления GPS. При этом могут использоваться другие типы автоматических систем рулевого управления, например, автоматическая система навигации дорожного движения (a lane guidance automatic steering system), применяемая для движения по дорогам. Альтернативно этому навигация может осуществляться при помощи любой системы управления навигацией, например, лазерной системы управления навигацией.
Поскольку настоящее изобретение относится к автоматическим системам рулевого управления, такие автоматические системы рулевого управления могут соответствовать требованиям Директивы №79 Европейской экономической комиссии ООН "Единообразные требования к аттестации транспортных средств в части рулевого оборудования".
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ПОДВЕСКИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2408475C2 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА ДЛЯ ПОДВЕСКИ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2341383C2 |
| УСТРОЙСТВО И СПОСОБ ПОДДЕРЖАНИЯ СОЗДАННОГО ГИДРАВЛИЧЕСКОГО ДАВЛЕНИЯ | 2017 |
|
RU2695932C1 |
| ГИДРООБЪЕМНОЕ РУЛЕВОЕ УПРАВЛЕНИЕ | 1992 |
|
RU2026225C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА КОЛЁС | 2011 |
|
RU2540298C1 |
| Система рулевого управления транспортного средства | 1984 |
|
SU1459963A1 |
| ВОЗДУХОДУВНЫЙ АППАРАТ ДЛЯ ЧАСТИЦ | 2019 |
|
RU2754055C2 |
| Система рулевого управления транспортного средства | 1985 |
|
SU1710420A1 |
| ВОЗДУХОДУВНЫЙ АППАРАТ ДЛЯ ЧАСТИЦ | 2019 |
|
RU2793045C2 |
| Гидравлическая система рулевого управления транспортного средства | 1982 |
|
SU1136746A3 |
Группа изобретений относится к вариантам выполнения рулевого устройства. Устройство содержит первую гидравлическую напорную камеру, вторую гидравлическую напорную камеру, третью гидравлическую напорную камеру и четвертую гидравлическую напорную камеру, насосную систему для подачи жидкости под давлением в систему рулевого управления, систему рулевого управления, обеспечивающую подачу жидкости под давлением в одну или более напорных камер из группы, включающей первую, вторую, третью и четвертую гидравлические напорные камеры. Система рулевого управления имеет первый режим, в котором жидкость под давлением одновременно подается в первую и третью гидравлические напорные камеры для обеспечения ведения в первом направлении или жидкость под давлением одновременно подается во вторую и четвертую гидравлические напорные камеры для обеспечения ведения во втором направлении. Система рулевого управления имеет второй режим, в котором жидкость под давлением подается автоматической системой рулевого управления в первую или в третью гидравлическую напорную камеру для обеспечения ведения в первом направлении или жидкость под давлением подается автоматической системой рулевого управления во вторую или в четвертую гидравлическую напорную камеру для обеспечения ведения во втором направлении, и при этом передаточное число рулевого управления во втором режиме выше, чем в первом режиме. Обеспечивается автоматическое управление с разными режимами работы. 2 н. и 16 з.п. ф-лы, 11 ил.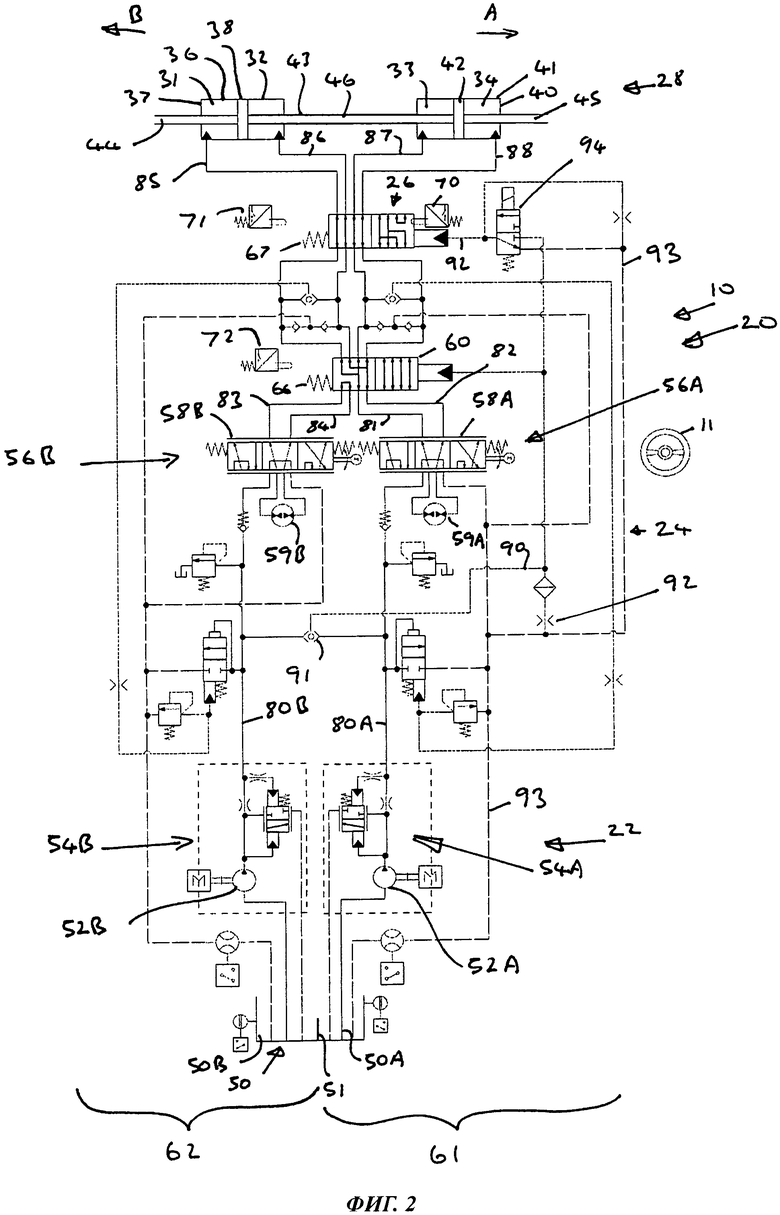
1. Рулевое устройство, содержащее первую гидравлическую напорную камеру, вторую гидравлическую напорную камеру, третью гидравлическую напорную камеру и четвертую гидравлическую напорную камеру, при этом первая и третья напорные камеры выполнены с возможностью избирательного управления для обеспечения ведения в первом направлении, а вторая и четвертая напорные камеры выполнены с возможностью избирательного управления для обеспечения ведения во втором направлении,
насосную систему для подачи жидкости под давлением в систему рулевого управления,
систему рулевого управления, обеспечивающую подачу жидкости под давлением в одну или более гидравлических напорных камер из группы, включающей указанные первую, вторую, третью и четвертую гидравлические напорные камеры,
при этом система рулевого управления имеет первый режим, при котором жидкость под давлением одновременно подается в первую и третью гидравлические напорные камеры для обеспечения ведения в первом направлении или жидкость под давлением одновременно подается во вторую и четвертую гидравлические напорные камеры для обеспечения ведения во втором направлении,
причем система рулевого управления имеет второй режим, при котором жидкость под давлением подается в одну из первой и третьей гидравлических напорных камер для обеспечения ведения в первом направлении или жидкость под давлением подается в одну из второй и четвертой гидравлических напорных камер для обеспечения ведения во втором направлении,
при этом передаточное число рулевого управления во втором режиме больше, чем в первом режиме.
2. Рулевое устройство по п.1, в котором при нахождении системы рулевого управления во втором режиме жидкость под давлением подается только в одну из первой и третьей гидравлических напорных камер для обеспечения ведения в первом направлении или жидкость под давлением подается только в одну из второй и четвертой гидравлических напорных камер для обеспечения ведения во втором направлении.
3. Рулевое устройство по п.1 или 2, содержащее
первый блок рулевого управления,
второй блок рулевого управления,
при этом при нахождении системы рулевого управления в первом режиме
первый блок рулевого управления избирательно подает жидкость под давлением в одну из первой и третьей камер одновременно со вторым блоком рулевого управления, подающим жидкость под давлением в другую из первой и третьей камер, для обеспечения ведения в первом направлении, или
первый блок рулевого управления избирательно подает жидкость под давлением в одну из второй и четвертой камер одновременно со вторым блоком рулевого управления, подающим жидкость под давлением в другую из второй и четвертой камер, для обеспечения ведения во втором направлении.
4. Рулевое устройство по п.3, в котором при нахождении системы рулевого управления во втором режиме первый блок рулевого управления избирательно подает жидкость под давлением в одну из первой и третьей гидравлических напорных камер одновременно со вторым блоком рулевого управления, подающим жидкость под давлением в указанную одну из первой и третьей гидравлических напорных камер, для обеспечения ведения в первом направлении, или
первый блок рулевого управления избирательно подает жидкость под давлением в одну из второй и четвертой гидравлических напорных камер одновременно со вторым блоком рулевого управления, подающим жидкость под давлением в указанную одну из второй и четвертой гидравлических напорных камер, для обеспечения ведения во втором направлении.
5. Рулевое устройство по п.4, содержащее клапан, имеющий первую позицию, которая определяет указанный первый режим, и вторую позицию, которая определяет указанный второй режим.
6. Рулевое устройство по п.5, в котором указанный клапан представляет собой золотниковый клапан или соленоидный клапан.
7. Рулевое устройство по п.5 или 6, содержащее первый датчик, определяющий нахождение указанного клапана в первой позиции, и/или второй датчик, определяющий нахождение указанного клапана во второй позиции.
8. Рулевое устройство по п.3, в котором насосная система содержит первый насос для подачи жидкости под давлением в первый блок рулевого управления и второй насос для подачи жидкости под давлением во второй блок рулевого управления.
9. Рулевое устройство по любому из пп.1, 2, 4, 5, 6, 8, в котором жидкость под давлением подается в одну или более гидравлических напорных камер из группы, включающей указанные первую, вторую, третью и четвертую гидравлические напорные камеры, когда система рулевого управления работает в первом режиме, при более низком давлении, чем давление жидкости, подаваемой в одну или более гидравлических напорных камер из группы, включающей указанные первую, вторую, третью и четвертую гидравлические напорные камеры, когда система рулевого управления работает во втором режиме.
10. Рулевое устройство по п.9, содержащее разгрузочный клапан, выполненный с возможностью сброса давления находящейся под давлением жидкости на первый уровень, когда система рулевого управления работает в первом режиме, и с возможностью сброса давления на второй уровень, более высокий, чем первый уровень, когда система рулевого управления работает во втором режиме.
11. Рулевое устройство по п.3, в котором система рулевого управления имеет третий режим, в котором только один из первого и второго блоков рулевого управления избирательно подает жидкость в первую и третью гидравлическую напорную камеру для обеспечения ведения в первом направлении, или
указанный только один из первого и второго блоков рулевого управления избирательно подает жидкость во вторую и четвертую гидравлическую напорную камеру для обеспечения ведения во втором направлении,
при этом передаточное число рулевого управления в третьем режиме меньше, чем в первом режиме.
12. Рулевое устройство по любому из пп.1, 2, 4, 5, 6, 8, 10, 11, в котором система рулевого управления имеет четвертый режим, в котором жидкость под давлением подается автоматической системой рулевого управления в одну из первой и третьей гидравлических напорных камер для обеспечения ведения в первом направлении или жидкость под давлением подается автоматической системой рулевого управления в одну из второй и четвертой гидравлических напорных камер для обеспечения ведения во втором направлении.
13. Рулевое устройство, содержащее первую гидравлическую напорную камеру, вторую гидравлическую напорную камеру, третью гидравлическую напорную камеру и четвертую гидравлическую напорную камеру, при этом первая и третья напорные камеры выполнены с возможностью избирательного управления для обеспечения ведения в первом направлении, а вторая и четвертая напорные камеры выполнены с возможностью избирательного управления для обеспечения ведения во втором направлении,
насосную систему для подачи жидкости под давлением в систему рулевого управления,
систему рулевого управления, обеспечивающую подачу жидкости под давлением в одну или более напорных камер из группы, включающей указанные первую, вторую, третью и четвертую гидравлические напорные камеры,
при этом система рулевого управления имеет первый режим, в котором жидкость под давлением одновременно подается в первую и третью гидравлические напорные камеры для обеспечения ведения в первом направлении или жидкость под давлением одновременно подается во вторую и четвертую гидравлические напорные камеры для обеспечения ведения во втором направлении,
причем система рулевого управления имеет второй режим, в котором жидкость под давлением подается автоматической системой рулевого управления в одну из первой или третьей гидравлических напорных камер для обеспечения ведения в первом направлении или жидкость под давлением подается автоматической системой рулевого управления в одну из второй или четвертой гидравлических напорных камер для обеспечения ведения во втором направлении.
14. Рулевое устройство по п.13, в котором при нахождении системы рулевого управления во втором режиме другая из первой и третьей напорных камер соединяется с другой из второй и четвертой напорных камер.
15. Рулевое устройство по п.14, содержащее
первый блок рулевого управления,
второй блок рулевого управления,
при этом при нахождении системы рулевого управления в первом режиме
первый блок рулевого управления избирательно подает жидкость под давлением в одну из первой и третьей камер одновременно со вторым блоком рулевого управления, подающим жидкость под давлением в другую из первой и третьей камер, для обеспечения ведения в первом направлении, или
первый блок рулевого управления избирательно подает жидкость под давлением в одну из второй и четвертой камер одновременно со вторым блоком рулевого управления, подающим жидкость под давлением в другую из второй и четвертой камер, для обеспечения ведения во втором направлении.
16. Рулевое устройство по п.15, в котором при нахождении системы рулевого управления во втором режиме другая из первой и третьей напорных камер при помощи одного из первого и второго блоков рулевого управления соединяется с другой из второй и четвертой напорных камер.
17. Рулевое устройство по п.16, в котором при нахождении системы рулевого управления во втором режиме другой из первого и второго блоков рулевого управления работает в плавающем режиме.
18. Рулевое устройство по п.17, в котором первый выход другого из первого и второго блоков рулевого управления соединяется со вторым выходом другого из первого и второго блоков рулевого управления, обеспечивая тем самым плавающий режим.
| US 2009038876 A1, 12.02.2009 | |||
| US 6279675 B1, 28.08.2001 | |||
| GB 1380354 A, 15.01.1975 | |||
| JP 3220952 B2, 22.10.2001 | |||
| СПОСОБ РАЗРАБОТКИ УГЛЕВОДОРОДНОГО СЫРЬЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2322608C1 |

