Изобретение относится к транспортному машиностроению, конкретно к гидроприводам рулевого управления транспортных средств, в частности колесных.
Целью настоящего изобретения является улучшение управляемости транспортного средства.
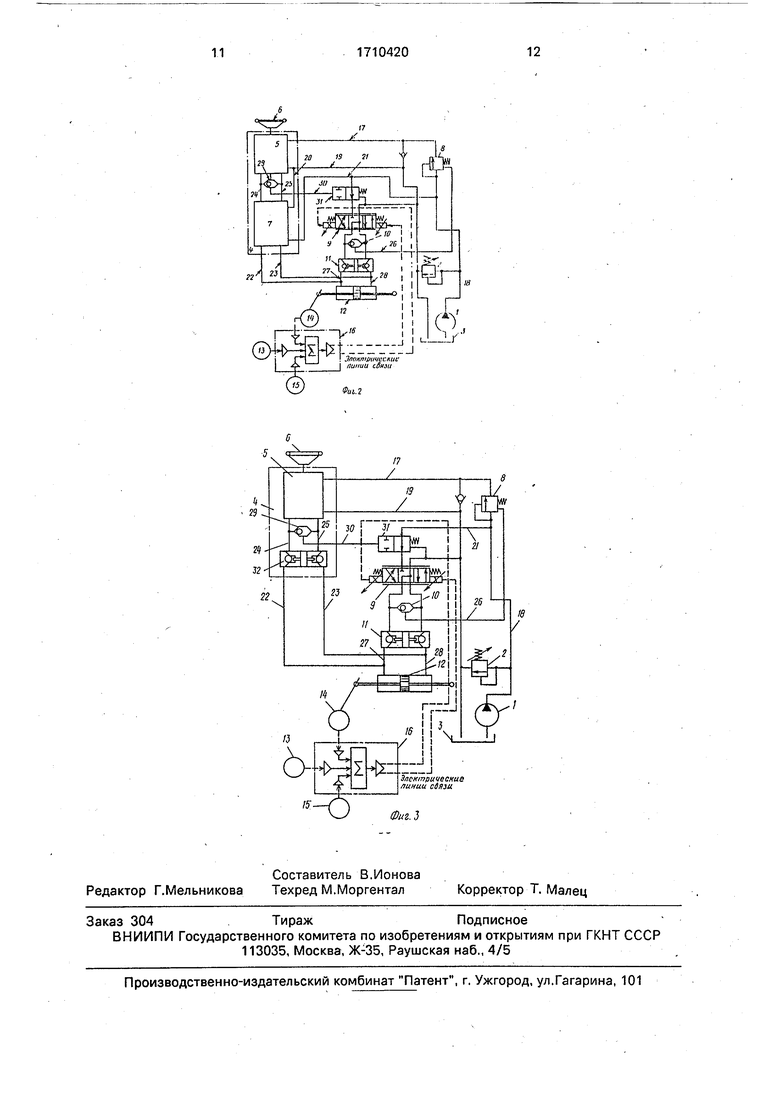
На фиг. v1 приведена принципиальная структурная схема предложенной системы;
на фиг. 2 - схема системы, реализующей режим ручного вождения; на фиг, 3 - то же в режиме автоматического вождения.
Система рулевого управления содержит насос 1, предохранительный клапан 2, гид- 5 робак 3, устройство 4 ручного управления, содержащее гидравлический,рулевой механизм 5, распределительное устройство которого механически связано с рулевым колесом 6, а также усилитель 7 потока, гид- 10 роуправляемый напорный клапан 8, четырехлинейный электрогидравлический усилитель 9 пропорционального действия, клапан ИЛИ 10. гидрозамок 11, гидроцилиндр 12 поворота, датчики траектории дви- 15 жения 13, положения штока гидроцилиндра поворота 14, крена 15 и усилитель,16.
Гидравлический рулевой механизм 5 сообщен напорной гидролинией 17 черезгидроуправляемый напорный клапан 8 с 20 выходом 18 насоса 1 и сливной гидролинией 19 с гидробаком 3.
Усилитель 7 потока гидролинией 20 соединен со сливной гидролинией 19, гидролинией 21 -свыходом 18насоса, гидролиниями 25 22 и 23 - с полостями гидроцилиндра 12 и рабочими гидролиниями 24 и 25 - с гидравлическим рулевым механизмом 5.
Датчики 13,14 и 15 электрически соединены через усилитель 16с входами управления 30 четырехлинейного электрогидравлического усилителя 9 пропорционального действия, первая линия которого соединена с выходом 18 насоса, вторая -со сливной гидролииией 19, а третья и четвертая - с входами клапана ИЛИ 35 10 и входами гидрозамка 11, а линия управления 26 гидроуправляемого напорного клапана 8 соединена с выходом клапана ИЛИ 10.
В нейтральной позиции четырехлинейного электрогидравлического усилителя 9 40 пропорционального действия его вторая, третья и четвертая линии соединены между собой, а в одной из рабочих позиций первая линия соединена с третьей, а вторая - с четвертой, а в другой позиции первая линия 45 соединена с четвертой, а вторая - с третьей.
Выходы гидрозамка 11 гидролиниями 27 и 28 сообщены с полостями гидроцилиндра 12 поворота.
На фиг. 2 и 3 рабочие гидролинии 24 и 50 25 сообщены с входами дополнительного клапана ИЛИ 29. выход которого гидролинией 30 сообщен с полостью управления дополнительного двухпозиционного гидроклапана 31. в одной из позиций которого 55 выход 18 насоса 1 сообщен с первой линией четырехпозиционного электрогидравлического усилителя пропорционального действия, а в другой выход 18 насоса 1 разобщен с первой линией, указанного усилителя. В
системе может быть установлен дополнительный гидрозамок 32.
При работе системы в режиме ручного управления питание усилителя 16 выключено.
При этом первая линия четырехлинейного электрогидравлического усилителя 9 пропорционального действия, сообщенная с выходом 18 насоса 1,.заперта. При отсутствии управляющих воздействий на рулевом колесе 6 полости гидроцилиндра 12 поворота заперты усилителем поток или гидрозамком устройства 4 ручного управления. При этом рабочая жидкость через гидроуправляемый напорный клапан 8 и гидравлический рулевой механизм 5 по гидролинии 19 поступает в гидробак 3.
При повороте рулевого колеса 6 в какую-либо сторону гидравлический рулевой механизм 5 подает рабочую жидкость по рабочим гидролиниям 24 или 25 к усилителю 7 потока (фиг. 1 и 2), гидроуправляемый гидрораспределитель которого под действием перепада в гидролиниях 24 смещается, и рабочая жидкость по гидролинии 21 подводится по одной из гидролиний 22 или 23 к одной из полостей гидроцилиндра 12 поворота, другая полость которого через вторую из гидролиний 22 или 23 сообщена гидролиниями 20 и 19 с гидробаком 3. Происходит поворот колесной машины. В случае, если вместо усилителя потока используется гидрозамок 32 (фиг. 3). подвод рабочей жидкости и слив в гидробак эеализуются через гидравлический рулевой механизм 5. в остальном принцип работы аналогичен ранее рассмотренному.
При работе в данном режиме управления должна сохраняться пропорциональность между скоростью поворота рулевого колеса и скоростью перемещения штока гидроцилиндра поворота, кинематически связанного с механизмом поворота машины.
Наличие дополнительного клапана ИЛИ 29 (фиг. 2 и 3) приводит к смене рабочих позиций дополнительного двухпозиционного гидроклапана 31 в моменты поворота рулевого колеса, что не оказывает влияния на процесс вождения в режиме ручного управления.
Работа автомата вождения в режиме аварийного управления сводится к следующему.
Питание усилителя 16 выключено.
Подача рабочей жидкости в полости гидроцилиндра осуществляется с помощью гидравлического рулевого механизма 5, гидромотор которого в этом случае работает как насос, вращение которого осуществляется через вал рулевого колеса. Рабочая жидкость к гидравлическому рулевому механизму поступает через обратный клапан гидролинии слива. Гидролиния 21 заперта запорным устройством усилителя потока. Давление на выходе насоса отсутствует. Подача рабочей жидкости в гидроцилиндр в этом случае осуществляется так же, как и в режиме ручного управления, однако поступление рабочей жидкости к усилителю потока по гидролинии 21 отсутствует, и скорость перемещения штока гидроцилиндра определяется пропускной способностью гидравлического рулевого механизма.
При работе автомата в режиме автоматического вождения питание усилителя 16 включено..
При отсутствии управляющих и возмущающих воздействий, что соответствует движению колесной машины согласно заданной траектории, работа автомата сводится к следующему.
Золотник распределительного устройства гидравлического рулевого механизма 5 находится в нейтральном положении, величины давлений в рабочих гидролиниях 24 и 25 равны, при этом гидроуправляемый распределитель усилителя 7 потока (фиг. 1 и 2) находится в нейтральной позиции, запира$ полости гидроцилиндра 12.Величина сигналов рассогласования на усилителе 16 равна нулю, что соответствует нейтральному положению четырехлинейного злектрогидравлического усилителя 9, при котором полости гидроцилиндра также герметизируются гидрозамком 11. При зтом поток рабочей жидкости поступает в гидробак 3 через гидроуправляемый напорный клапан и гидравлический рулевой механизм 5, а величина давления на выходе насоса определяется усилием пружины напорного клапана и гидравлической проводимостью гидравлического рулевого механизма, что и определяется рабочий перепад на кромке усилителя 9. Под действием пружины дополнительный двухпозиционный клапан находится в позиции, при которой выход 18 насоса гидролинией 21 сообщен с первой линией электрогидравлического усилителя 9.
При отклонений колесной машины от заданной траектории движения, определяемой, например, следом (бороздой, следом маркера и т.д.), датчик 13 траектории вырабатывает сигнал, который усиливается на усилителе 16 и поступает на вход одного из электромеханических преобразователей электрогидравлического усилителя 9. Золотник последнего смещается, и рабочая жидкость через гидрозамок и одну из гидролиний 27 или 28 поступает в полость гидроцилиндра 12, шток последнего смещается, осуществляя поворот рабочих органов и машины в целом.
Поворот машины происходит до тех
пор, пока величина сигнала датчика траектории не будет скомпенсирована величиной сигнала датчика положения штока гидроцилиндра.
В моменты поворота под действием перепада давлений в третьей и четвертой линиях усилителя 9 запорный элемент клапана ИЛИ переключается и сообщает соответствующую линию с полостью напорного клапана 8 со стороны пружины, что приводит к
автоматическому изменению давления на выходе 18 насоса в зависимости от изменения нагрузки на рабочих органах управления поворотом, что стабилизирует перепад на кромках электрогидравлического усилителя, а следовательно, и скоростные показатели системы.
При многократном повторении движения относительно заданной траектории (например, во время пахоты, культивации, сева
и т.д.) происходит накопление ошибок, что приводит к деформации траектории, которая корректируется за счет поворота рулевого колеса механиком-водителем, что требует автоматического переключения автомата с режима автоматического вождения на режим ручного управления.
При вращении рулевого колеса (фиг. 2 и 3)в рабочих гидролиниях 24 и 25 появляется перепад давлений, что при водит к срабатыванию запорного элемента дополнительного клапана ИЛИ 29, и под действием давления на его выходе дополнительный двухпозиционный клапан 31 смещается в другую рабочую позицию, при которой первая линия электрогидравлического усилителя 9 отсечена от выхода 18 насоса, что и отключает систему с режима автоматического вождения.
Под действием перепада в рабочих гидролиниях 24 и 25 система переходит в режим ручного управления, работа которого рассмотрена выше.
Таким образом, траектория корректируется за счет ручного управления. В моменты прекращения вращения рулевого колеса перепад в рабочих гидролиниях исчезает, гидроуправляемый распределитель усилителя 7 потока становится в нейтральное положение, а дополнительный двухпозиционный клапан 31 под действием пружины становится в позицию, при которой выход насоса сообщен с первой линией электрогидравлического усилителя 9 и система переходит в режим автоматического вождения.
При движении по наклонным участкам пути, вызывающим поперечный крен колесных машин, под действием возмущающих воздействий, вызванных изменением положения координат датчика траектории относительно заданных траекторных , происходит изменение траектории движения. В целях реализации автоматической коррекции траектории движения в системе установлен датчик 15 крена, который при кренах выдает сигнал, пропорциональный углу крена, который усиливается на усилителе, что приводит к повороту колесной машины до тех пор, пока сигналы датчиков траектории и положения не хомпенсируют наведенное возмущение. Движение машины происходит по скорректированной траектории.
Формула изобретения 1. Система рулевого управления транспрртного средства, содержащая гидравлический рулевой механизм механически связанный с рулевым колесом и гидравлически соединенный напорной гидррлинией через гидроуправляемый напорный клапан с насосом и сливной гидролинией с гидробаком, усилитель потока, гидравлически соединенный с полостями гидроцилиндра поворота, с гидробаком, посредством рабочих гидролиний - с гидравлическим рулевым механизмом, а также с насосом, четырехлинейный электрогидравлический усилитель пропорционального действия, первая линия, которого соединена с насосом, вторая - с гидробаком, а третья и четвертая линии соединены с входами клапана
ИЛИ и с входами гидрозамка, причем выход клапана ИЛИ соединен с линией управления гидроуправляемого напорного клапана, в нейтральной позиции четцрехлинейного
электрогидравлического усилителя его вторая, третья и четвертая линии выполнены с возможностью соединения между собой, одной из рабочих позиций первая линия соединена с третьей, а вторая - с четвертой, а в другой позиции первая линия - с четвертой, а вторая - с третьей, и датчики траектории движения, положения штока гидроцилиндра, поворота и крена, злектрически соединенные с входами управления
электрогидравлического усилителя, о т л ичающаяся тем, что, с целью улучшения упраэляемости транспортного средства, выходы гидрозамка гидравлически соединены с полостями гидроцилиндра поворота.
2. Система по п. 1, отличающаяся тем, что она снабжена дополнительным клапаном ИЛИ, входы которого соединены с рабочими гидролиниями, и гидроуправляемым нормально открытым двухпозиционным гидроклапаном, установленным в гидролинии, соединяющей четырехлинейный электрогидравлический усилитель с насосом, а линия управления гидроуправляемого гидроклапана соединена с выходом дополнительного
клапана ИЛИ.
3. Система попп. 1 и2, отличающаяся тем, что она снабжена дополнительным гидрозамком, установленным перед входами в полости исполнительного
гидроцилиндра поворота от гидравлического рулевого механизма.
Фиг. /

| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическое устройство рулевого управления транспортного средства | 1985 |
|
SU1337306A1 |
| Объемный гидропривод рулевого управления транспортного средства | 1984 |
|
SU1180291A1 |
| Система рулевого управления автопоезда | 1987 |
|
SU1474016A1 |
| Объединенная гидравлическая система рулевого управления и дополнительного потребителя на транспортном средстве (ее варианты) | 1983 |
|
SU1230906A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| Переключающее устройство системы управления транспортным средством | 1987 |
|
SU1706907A1 |
| Гидравлическая система рулевого управления транспортного средства | 1986 |
|
SU1316898A1 |
| Гидросистема рулевого управления колесного транспортного средства | 1983 |
|
SU1146227A1 |
| Система рулевого управления транспортного средства | 1984 |
|
SU1459963A1 |
| Стенд для испытаний систем рулевого управления транспортных средств | 1984 |
|
SU1219957A1 |

Изобретение относится к системам рулевого управления транспортных средств. Цель изобретения - улучшение управляемости. Система содержит насос 1, предохранительный клапан 2, гидробак 3, устройство 4 ручного управления, содержащее гидравлический рулевой механизм (ГРМ) 5, распределительное устройство которого механически связано с рулевым колесом 6, а также усилитель 1 потока, гидроуправляе- мый напорный клапан 8, четырехлинейный электрогидравлический усилитель 9 пропорционального действия, напорная гидролиния которого соединена с выходом насоса, клапан ИЛИ 10, гидрозамок 11, гидроцилиндр 12 поворота, датчики траектории движения 13, положения штока гидроцилиндра поворота 14, крена 15 и усилитель 16. Для улучшения показателей качества регулирования автомата вождения выходы гидрозамка дополнительно сообщены гидролиниями 27 и 28 с полостями гидроцилиндра 12 поворота. Для обеспечения коррекции траектории движения в режиме автоматического вождения за счет поворота рулевого колеса рабочие гидролинии 24 и 25 сообщены с входами дополнительного клапана ИЛИ 29, выход которого гидролинией 30 сообщен с полостью управления дополнительного двухпозиционного 'гидроклапана 31, в одной из рабочих позиций которого выход 18 насоса 1 сообщен с напорной линией четырехлинейного электрогидравлического усилителя пропорционального действия, а в другой выход 18 насоса 1 разобщен с напорной линией указанного усилителя. Во время работы системы распределительное устройство ГРМ 5 посредством рабочих гидролиний 24 и 25 может сообщаться с входами гидрозамка (вместо усилителя 7 потока), выходы которого сообщены с полостями гидроцилиндра 12 поворота. 2 з.п. ф-лы, 3 ил.-,^ЁОJb.hO О
| Объемный гидропривод рулевого управления транспортного средства | 1984 |
|
SU1180291A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
