Область применения
Настоящее изобретение относится к определению угла поворота колес транспортного средства. В частности, настоящее изобретение относится к определению угла поворота колес транспортного средства, имеющего систему рулевого управления с гидравлическим приводом, способом, в котором используется сочетание из по меньшей мере измеренных значений скорости рысканья, скорости транспортного средства и потока жидкости в системе гидропривода.
Уровень техники
Автоматические системы ведения иногда используются для ведения и/или управления работой системы рулевого управления транспортных средств, особенно транспортных средств, работающих во внедорожных условиях, например в сельском хозяйстве, строительстве, горных работах и лесном хозяйстве, таких как тракторы, комбайны, экскаваторы, грейдеры, самосвалы и другая мощная специализированная техника. Система ведения, как правило, предназначена для помощи оператору в ведении транспортного средства по заданному маршруту путем подачи оператору указаний или для фактического ведения транспортного средства в полностью автоматическом или полуавтоматическом режиме.
Системы ведения, как правило, включают блок GNSS (Глобальной навигационной спутниковой системы), включающий системы кинематики в реальном времени, геопозиционирования и прочие и определяющий, а во многих случаях и отображающий на устройстве вывода текущее место нахождения транспортного средства по отношению к заданной области и/или маршруту. Далее система ведения, как правило, хранит на борту транспортного средства заданный маршрут, сравнивает текущее положение транспортного средства с данным маршрутом и на основе данной информации формирует выходные сигналы (например, выдает указания для оператора или полностью ведет транспортное средство).
В автоматическом (или полуавтоматическом) режиме работы такая система должна осуществлять повороты транспортного средства. Для того чтобы система ведения эффективно осуществляла рулевое управление транспортным средством, она должна получать текущие значения угла поворота колес (измеренные или рассчитанные). Известные способы определения угла поворота колес транспортного средства включают способы, основанные на механических методах измерения углов, методах с использованием гироскопической системы и системы GNSS, а также на измерении потока жидкости в контуре гидропривода рулевого управления с помощью соответствующих датчиков потока.
Механические методы измерения угла поворота колес обычно основаны на использовании датчика, непосредственно измеряющего угловое положение колес транспортного средства, например потенциометрического или кодового датчика поворота, или им подобного. Методы измерений с помощью гироскопа и GNSS основаны на использовании гироскопа для определения угловой скорости рысканья, использовании системы GNSS для определения скорости транспортного средства и расчете на основе двух данных параметров угла поворота колес. И наконец, в системах с использованием датчиков потока жидкости в контуре рулевого управления транспортного средства производится интегрирование потока жидкости, поступающей к плунжеру гидроусилителя руля, и таким образом рассчитывается угол поворота колес транспортного средства.
При самостоятельной установке автоматических систем рулевого управления (в меньшей степени это касается установки таких систем при производстве транспортного средства) критическими факторами являются легкость установки и точность системы. Упомянутые выше известные системы измерений угла поворота колес по легкости установки располагаются следующим образом (от самой легкой до самой сложной): гироскоп и GNSS, датчик потока в гидравлическом контуре и механические системы измерения углов. Однако по точности системы располагаются обратным образом (от самой точной до наименее точной): механические системы измерения углов, датчики потока в гидравлическом контуре и системы с гироскопом и GNSS. Наглядно это показано в таблице ниже:
Как видно из таблицы, легкость установки и точность системы «обратно пропорциональны», то есть самая точная система является самой сложной в установке, а самая легкая в установке является наименее точной.
Из таблицы может также показаться, что системы измерения потока жидкости в гидравлическом контуре, занимающие среднее положение по точности и легкости в установке, являются оптимальным компромиссом между двумя данными параметрами. Однако серьезным недостатком систем измерения потока в гидравлическом контуре является проблема надежности и безопасности. А именно, если гидравлический датчик потока откажет и заблокирует гидравлический контур, управление колесами транспортного средства будет сильно затруднено, из-за того, что поток жидкости в гидравлическом контуре станет недостаточным. И это касается как ручного, так и автоматического режима рулевого управления, поскольку датчик потока фактически установлен в основной гидравлический контур рулевого управления.
Для решения данной существенной проблемы, угрожающей надежности и безопасности, параллельно всем датчикам потока устанавливаются аварийные перепускные клапаны, позволяющие оператору осуществлять рулевое управление транспортным средством даже в случае отказа датчиков потока. Однако даже если установлены такие аварийные перепускные клапаны, отклик транспортного средства на действия оператора ухудшается. И хотя это лучше, чем когда аварийные перепускные клапаны не установлены, безопасность управления транспортного средства в некоторой степени все равно страдает, поскольку отклик транспортного средства на рулевое управление ухудшается и оператору придется прилагать дополнительные усилия, чтобы его компенсировать.
Цель изобретения
Целью настоящего изобретения является предложить способ и систему определения угла поворота колес транспортного средства, которые позволяют преодолеть или по меньшей мере уменьшить один или более недостатков или проблем, связанных с существующими системами и описанными выше, или по меньшей мере представляют собой полезную альтернативу.
Сущность изобретения
В первом воплощении настоящего изобретения предлагается способ определения угла поворота колес транспортного средства, содержащий этапы:
определения угловой скорости рысканья транспортного средства;
определения скорости транспортного средства;
определения потока жидкости в гидравлическом узле рулевого управления, подключенном параллельно гидравлическому контуру ручного рулевого управления транспортного средства;
и обработки данных угловой скорости рысканья, скорости и потока жидкости для определения угла поворота колес транспортного средства.
Этап обработки предпочтительно содержит использование данных угловой скорости рысканья и скорости для получения начальной абсолютной оценки (или для обновления предыдущей оценки) угла поворота колес, и использование данных потока для получения относительной оценки угла поворота колес.
Реализация способа предпочтительно начинается при включении автоматического рулевого управления транспортным средством. Автоматическое рулевое управления предпочтительно включается оператором. После включения автоматического рулевого управления предпочтительно сначала выполняются этапы определения угловой скорости рысканья и скорости транспортного средства, и затем на этапе обработки предпочтительно используются полученные данные угловой скорости рысканья и скорости для выработки начальной оценки угла поворота колес.
Как только сделана начальная оценка угла поворота колеса транспортного средства, предпочтительно производится обработка вновь получаемых данных угловой скорости рысканья и скорости транспортного средства для обновления оценки угла поворота колес. После этого могут использоваться данные потока, получаемые с гидравлического узла рулевого управления, для относительной оценки (оценки изменений) угла поворота колес (например, изменений после включения системы автоматического рулевого управления).
Способ может дополнительно содержать этап определения положения транспортного средства относительно некоторой области (поля, района, страны, мира или иных областей). Положение транспортного средства предпочтительно определяется с использованием систем GNSS, кинематики в реальном времени и им подобных. Положение транспортного средства по отношению к по меньшей мере части области может отображаться на устройстве вывода. Устройство вывода предпочтительно расположено в кабине транспортного средства.
На устройстве вывода могут также отображаться одна или более из определяемых переменных, таких как, например, угловая скорость рысканья, скорость транспортного средства и определяемый угол поворота колес. Способ может дополнительно содержать этап ввода задаваемого маршрута. Заданный маршрут, или его часть, также может отображаться на устройстве вывода. В случаях когда задан маршрут, способ может дополнительно содержать этап отслеживания положения транспортного средства по отношению к заданному маршруту и выдачи сигналов управления, относящихся по меньшей мере к углу поворота колес, для удержания транспортного средства на заданном маршруте.
Во втором воплощении настоящего изобретения предлагается способ определения угла поворота колес транспортного средства для использования в автоматической системе рулевого управления, содержащий этапы:
включения автоматической системы рулевого управления;
проведения начальной оценки угла поворота колес, содержащего этапы:
определения угловой скорости рысканья транспортного средства;
определения скорости транспортного средства;
и обработки значений угловой скорости рысканья и скорости транспортного средства для получения начальной абсолютной оценки угла поворота колес;
после этого, по меньшей мере пока включена автоматическая система рулевого управления, следуют повторяющиеся этапы:
определения угловой скорости рысканья транспортного средства;
определения скорости транспортного средства
определения потока жидкости в гидравлическом узле рулевого управления, подключенном параллельно гидравлическому контуру ручного рулевого управления транспортного средства;
обработки данных угловой скорости рысканья и скорости для обновления абсолютной оценки угла поворота колес;
обработки данных потока жидкости для выработки относительной оценки (оценки изменений) угла поворота колес после включения автоматической системы рулевого управления;
и определения угла поворота колес транспортного средства на основе абсолютных и относительных оценок.
Этап определения угловой скорости рысканья транспортного средства предпочтительно содержит измерение выходного сигнала гироскопического датчика. Гироскопический датчик предпочтительно расположен на корпусе транспортного средства, еще более предпочтительно - в кабине транспортного средства. Гироскопический датчик (основной или дополнительный) может быть расположен по меньшей мере на одном из колес транспортного средства (для определения угловой скорости рысканья колеса и соответственно углового расположения данного колеса транспортного средства).
Этап определения скорости транспортного средства предпочтительно содержит расчет скорости транспортного средства по данным GNSS. Скорость транспортного средства может быть также получена с приборов, установленных на транспортном средстве (например, со спидометра).
В третьем воплощении изобретения предлагается система рулевого управления, определяющая угол поворота колес транспортного средства и содержащая:
блок определения угловой скорости рысканья;
блок определения скорости;
систему управления системой рулевого управления;
и гидравлический узел рулевого управления, подключенный параллельно гидравлическому контуру ручного рулевого управления транспортного средства, при этом гидравлический узел рулевого управления содержит:
блок гидравлических клапанов, связанный с системой управления системой рулевого управления, предназначенный для включения потока жидкости в гидравлических трубопроводах, подключенных к гидравлическому контуру рулевого управления;
датчик потока, установленный по меньшей мере в одном из гидравлических трубопроводов между блоком клапанов и гидравлическим контуром рулевого управления;
при этом система управления системой рулевого управления обрабатывает данные, получаемые от блока определения угловой скорости рысканья, блока определения скорости и датчика потока гидравлического узла рулевого управления, для определения угла поворота колес транспортного средства.
Система управления системой рулевого управления предпочтительно оценивает угол поворота колес путем обработки значения угловой скорости рысканья, полученного с блока определения угловой скорости рысканья, и значения скорости, полученного с блока определения скорости, для выработки абсолютной оценки угла поворота колес, и обработки измеренного значения потока, полученного с датчика потока гидравлического узла рулевого управления, для выработки относительной оценки угла поворота колес. Система управления системой рулевого управления предпочтительно обрабатывает значения абсолютных и относительных оценок для определения угла поворота колес.
Блок определения угловой скорости рысканья транспортного средства предпочтительно содержит гироскопический датчик. Гироскопический датчик предпочтительно расположен на корпусе транспортного средства, еще более предпочтительно - в кабине транспортного средства. Гироскопический датчик (основной или дополнительный) может быть расположен по меньшей мере на одном из колес транспортного средства (для определения угловой скорости рысканья данного колеса).
Система рулевого управления предпочтительно дополнительно содержит датчик GNSS. Блок определения скорости предпочтительно использует данные GNSS, получаемые с датчика GNSS, для расчета скорости транспортного средства.
Система рулевого управления может дополнительно содержать приборную панель, предпочтительно как часть системы управления системой рулевого управления. Приборная панель предпочтительно содержит пользовательский интерфейс, посредством которого оператор может взаимодействовать и/или осуществлять связь с системой. Приборная панель предпочтительно содержит устройство вывода. Приборная панель предпочтительно установлена в кабине транспортного средства, например на ветровом стекле или в стандартном гнезде DIN под радиоприемник). Приборная панель предпочтительно включает датчик GNSS и имеет связь с одной или более антеннами GNSS, которые могут быть установлены снаружи кабины.
Система управления системой рулевого управления может дополнительно содержать блок управления системой рулевого управления. Блок управления системой рулевого управления предпочтительно является принудительно включаемым. Включение блока управления системой рулевого управления предпочтительно осуществляется оператором. Блок управления системой рулевого управления может быть выполнен за единое целое с приборной панелью, или он может быть выполнен в виде отдельного устройства. В случае, если блок управления системой рулевого управления является отдельным устройством, он предпочтительно расположен снаружи кабины и электрически связан с приборной панелью посредством одного или более соединительных кабелей. В качестве альтернативы, или в дополнение к этому, блок управления системой рулевого управления может иметь беспроводную связь с приборной панелью и/или прочими компонентами системы.
Система рулевого управления предпочтительно является автоматической системой рулевого управления, и в предпочтительном воплощении, когда включена автоматическая система рулевого управления, поток жидкости имеется только в гидравлических трубопроводах между блоком клапанов и гидравлическим контуром системы рулевого управления.
Блок клапанов предпочтительно гидравлически связан со следующими компонентами: гидравлическим контуром ручной системы рулевого управления посредством двух гидравлических трубопроводов; напорным трубопроводом гидравлического насоса транспортного средства посредством еще одного гидравлического трубопровода и гидравлическим баком/резервуаром транспортного средства посредством еще одного гидравлического трубопровода. При включении системы управления системой рулевого управления и включении блока клапанов, система управления системой рулевого управления предпочтительно использует имеющиеся на транспортном средстве насос и резервуар для приведения в действие контура рулевого управления через блок клапанов. Выходные сигналы системы управления системой рулевого управления могут определяться множеством факторов, но главным образом они должны учитывать определяемый ей угол поворота колес.
В четвертом воплощении изобретения предлагается набор для автоматического рулевого управления транспортного средства, предназначенный для установки на существующее транспортное средство и содержащий:
блок определения угловой скорости рысканья;
блок определения скорости;
систему управления системой рулевого управления;
блок гидравлических клапанов, связанный с системой управления системой рулевого управления и предназначенный для включения потока жидкости в гидравлических трубопроводах, выполненных с возможностью их подключения к гидравлическому контуру ручного рулевого управления транспортного средства;
и датчик потока, установленный в гидравлическом трубопроводе между блоком клапанов и гидравлическим контуром рулевого управления, предназначенный для измерения потока жидкости в гидравлическом трубопроводе;
при этом система управления системой рулевого управления:
принимает и обрабатывает данные с блока определения угловой скорости рысканья, блока определения скорости и датчика потока для определения угла поворота колес транспортного средства;
и обрабатывает полученное значение угла поворота колес, вместе с прочими данными, для определения выходного сигнала системы управления
системой рулевого управления, который должен быть исполнен блоком гидравлических клапанов.
Система управления системой рулевого управления предпочтительно обрабатывает значение угловой скорости рысканья, полученное с блока определения угловой скорости рысканья, и значение скорости, полученное с блока определения скорости, для выработки или обновления абсолютной оценки угла поворота колес, обрабатывает измеренное значение потока, полученное с датчика потока, для выработки относительной оценки угла поворота колес, и обрабатывает значения абсолютной и относительной оценок для определения фактического угла поворота колес.
Краткое описание чертежей
Ниже приводится более подробное описание предпочтительных воплощений настоящего изобретения, приводимых только в качестве примеров, со ссылками на прилагаемые чертежи.
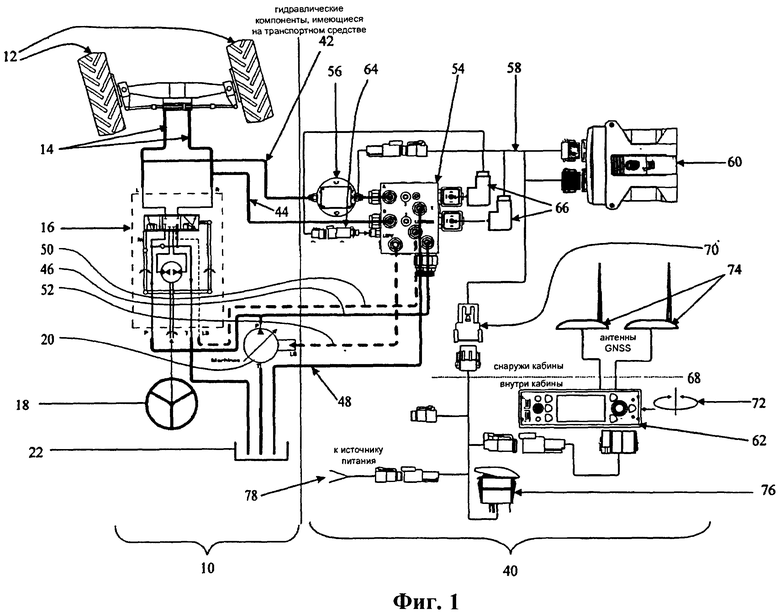
Фиг.1. Диаграмма, на которой показаны основные компоненты системы и связи между ними в соответствии с одним из воплощений настоящего изобретения.
Фиг.2. Диаграмма, на которой в общем представлен способ определения угла поворота колес, с использованием некоторых компонентов системы, изображенной на фиг.1.
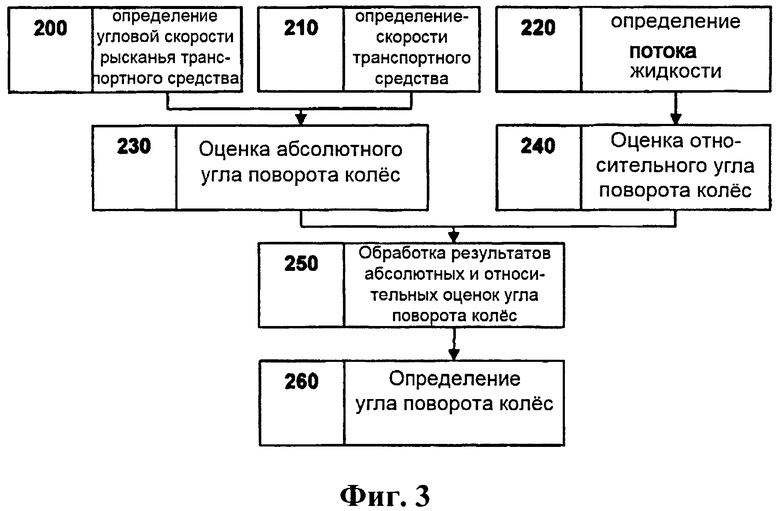
Фиг.3. Диаграмма, на которой более подробно представлен способ определения угла поворота колес, в общем представленный на фиг.2, в соответствии с одним из воплощений настоящего изобретения.
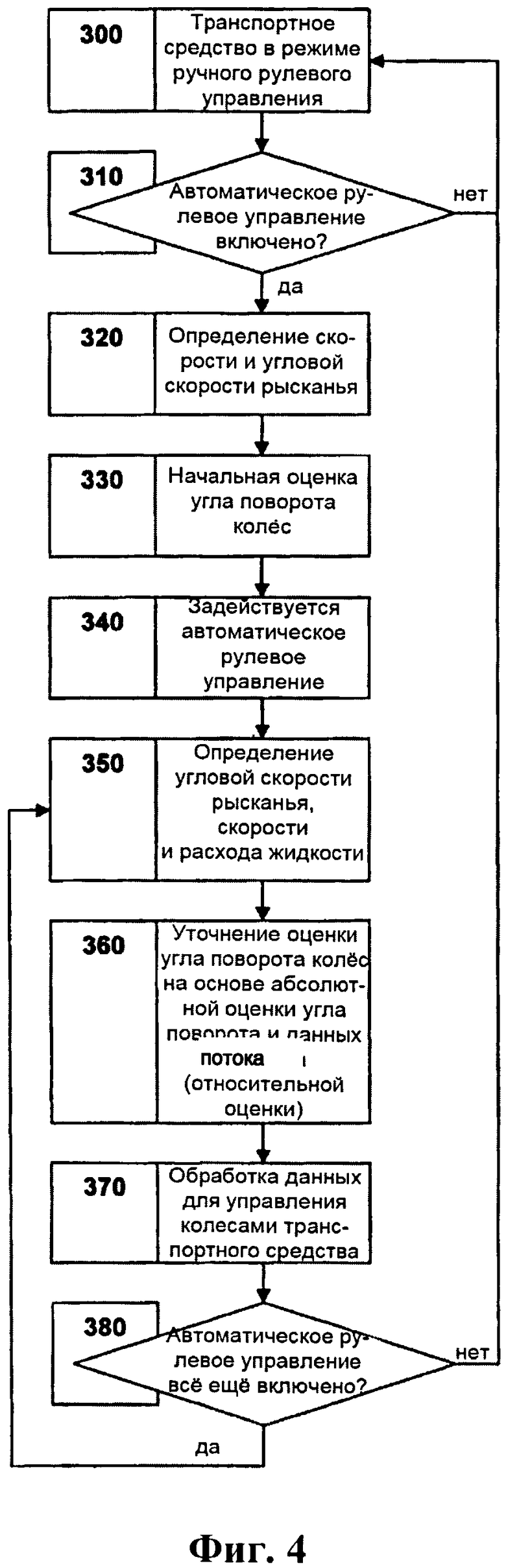
Фиг.4. Диаграмма, отображающая общий принцип работы автоматической системы рулевого управления, в которой используется определение угла поворота колес.
Подробное описание изобретения
На фиг.1 приведена диаграмма, отображающая основные компоненты транспортного средства 10 и автоматической системы 40 рулевого управления. Транспортное средство 10 имеет колеса 12, поворачиваемые за счет создания давления в гидравлических трубопроводах, подключенных к стандартному гидравлическому рулевому механизму 16. Гидравлический рулевой механизм 16, как правило, включающий гидравлические клапаны и орбитальный двигатель, управляется связанным с ними рулевым колесом 18. При работе транспортного средства оператор, как правило, вручную поворачивает рулевое колесо 18, в результате чего гидравлический рулевой механизм 16 создает поток жидкости в гидравлических трубопроводах 14, в результате чего осуществляется поворот колес 12 влево или вправо, то есть меняется их положение относительно корпуса транспортного средства.
Транспортное средство 10 включает также гидравлический насос 20, связанный с резервуаром 22 и гидравлическим рулевым механизмом 16. В показанном воплощении гидравлический насос 20 может работать с переменным потоком, перекачивая текучую среду в гидравлической системе из резервуара 22 через шланг к всасывающему патрубку насоса 20 (обозначен Т) и от напорного патрубка насоса 20 (обозначен, как ′Р′) через шланг к гидравлическому механизму 16 рулевого управления. Изображенный насос 20 имеет также датчик нагрузки, обозначенный как LS.
Автоматическая система 40 рулевого управления гидравлически связана с транспортным средством 10 гидравлическими трубопроводами 42 и 44, подключенными к существующим трубопроводам 14 рулевого управления транспортного средства 10 посредством гидравлического трубопровода 46, подключенного к напорной стороне гидравлического насоса 20 и гидравлического трубопровода, подключенного к резервуару 22. В качестве дополнительной возможности, система 40 рулевого управления может быть связана трубопроводами 50 и 52 с для измерений нагрузки (идущими от рулевого механизма 16 и насоса 20 соответственно).
Все гидравлические трубопроводы 42, 44, 46, 48, 50 и 52 гидравлически связаны с блоком 54 клапанов. Гидравлический трубопровод 42 подключен через датчик 56 потока, по причинам, которые станут понятными далее. Блок 54 клапанов электрически связан посредством электрических кабелей 58 с системой управления системой рулевого управления, выполненной в виде контроллера 60 рулевого управления и индикаторной панели 62. И хотя в показанном воплощении для обеспечения связи между различными компонентами используются электрические кабели 58, вместо по меньшей мере некоторых электрических кабелей или в дополнение к ним может использоваться беспроводная связь. Кроме того, хотя в данном воплощении показано, что контроллер 60 рулевого управления и индикаторная панель 62 являются отдельными компонентами, они могут быть также выполнены за единое целое.
Контроллер 60 рулевого управления электрически связан с блоком 54 клапанов посредством датчика 64 давления, датчика 56 потока и гидравлических исполнительных элементов 66. Контроллер 60 рулевого управления в данном воплощении расположен снаружи кабины (граница между внутренним и наружным пространством кабины обозначена пунктирной линией 68). Контроллер 60 рулевого управления и индикаторная панель 62 электрически связаны через разъем 70. На фиг.1 показано также множество прочих разъемов. Такие разъемы используются, как правило, для обеспечения модульности системы, а также для обеспечения возможности отсоединения различных частей или компонентов, например, при обслуживании системы. Сведущим в данной области техники будет понятно, что они в сущности не влияют на функционирование предмета изобретения (если иное не указано явно) и что они включены главным образом для удобства.
Индикаторная панель 62 включает блок определения угловой скорости рысканья, выполненный в виде внутреннего гироскопического датчика («гироскопа»), обозначенного номером позиции 72, и блок определения скорости, выполненный в виде системы GNSS. Система GNSS имеет один или более датчиков GNSS (как правило, расположенных на индикаторной панели 62) и подключена к одной или более антеннам 74 GNSS (на фиг.1 показаны две антенны), которые, как правило, устанавливают снаружи кабины для уменьшения потерь сигнала, во избежания помех и по прочим причинам. По одному или более показаниям положения транспортного средства с течением времени, получаемым системой GNSS, может быть определена скорость движения транспортного средства (а также азимутальное направление его движения). В качестве альтернативы, скорость движения транспортного средства может быть с приборов, имеющихся на транспортном средстве (например, со спидометра), или иными методами измерений. Измерения, проводимые системой GNSS, могут также использоваться для коррекции возможной систематической ошибки гироскопического датчика.
Индикаторная панель 62 связана также с выключателем 76 и источником питания 78. Питание 78 предпочтительно непосредственно берется от источника энергии, установленного на транспортном средстве, например от аккумуляторной батареи (не показана). В качестве альтернативы или в дополнение система 40 рулевого управления может иметь свой собственный источник энергии, например аккумуляторную батарею, и/или генератор (например, солнечную батарею).
Когда оператор ведет транспортное средство 10 в режиме ручного управления, система 40 рулевого управления, как правило, не активна. Система 40 может находиться в режиме ожидания или ином пассивном режиме или может наблюдать за положением транспортного средства 10, используя GNSS или иным образом, не вмешиваясь при этом активно в управление колесами транспортного средства (то есть обеспечивая обратную связь для оператора, но не управляя каким-либо образом движением транспортного средства).
При использовании системы 40 рулевого управления контроллер 60 рулевого управления и/или индикаторная панель 62 обрабатывают данные, получаемые системой GNSS через антенны 74 и определяют, в числе прочих параметров (таких как, например, место нахождения транспортного средства), скорость транспортного средства. Кроме того, с помощью гироскопа 72 контроллер 60 рулевого управления и/или индикаторная панель 62 определяют угловую скорость рысканья 10. Датчик 56 потока может использоваться для определения потока жидкости в гидравлическом трубопроводе 42 (как показано на данном чертеже, но в альтернативных воплощениях он может быть установлен на гидравлическом трубопроводе 44). Подразумевается, что трубопровод 42 является обратным по отношению к трубопроводу 44, поэтому, поскольку датчик потока может измерять поток в обоих направлениях, для определения потока жидкости в любом из трубопроводов 42 и 44 достаточно одного датчика потока (по меньшей мере для данного типа рулевого механизма). Поскольку гидравлические трубопроводы 42 и 44 подключены параллельно штатным гидравлическим трубопроводам 14, датчик 56 потока не будет определять поток жидкости в штатных гидравлических трубопроводах 14, когда транспортное средство находится в режиме ручного управления (то есть когда поворот колес осуществляется оператором с помощью рулевого колеса 18).
Как показано на фиг.2, при работе система 40 рулевого управления транспортного средства получает данные угловой скорости рысканья транспортного средства (этап 100), данные скорости транспортного средства (этап 110) и данные потока в гидравлическом контуре (этап 120). И хотя на данном чертеже показано, что данные этапы (100, 110 и 120) выполняются параллельно, подразумевается, что один или более этапов могут выполняться последовательно. Полученные данные (на этапах 100, 110 и 120) на последующем этапе (130) подвергаются обработке контроллером 60 рулевого управления и/или индикаторной панелью 62, и определяется угол 12 поворота колес (этап 140). Полученный угол поворота 12 может затем использоваться различными системами управления для автоматического ведения транспортного средства 10.
На фиг.3 дополнительно показано, что в одном из воплощений данные угловой скорости рысканья (определяемые на этапе 200) и данные скорости транспортного средства (определяемые на этапе 210) используются для выработки начальной оценки абсолютного угла 12 поворота колес или для обновления имеющейся оценки абсолютного угла поворота колес 12 (этап 230). После этого используются данные потока жидкости в гидравлических трубопроводах (полученные на этапе 220) для оценки относительного угла поворота колес (этап 240).
Оценка относительного угла поворота колес (получаемая на этапе 240) основана на прямом измерении потока жидкости в гидравлическом контуре, но позволяет получить только относительное изменение угла поворота колес, поскольку датчик 56 потока позволяет определить только изменения потока жидкости и не позволяет определить абсолютный угол расположения колес 12. Кроме того, поскольку датчик 56 не фиксирует никакого потока, когда транспортное средство 10 находится в режиме ручного управления (то есть когда колеса 12 поворачиваются только под действием рулевого механизма 16), угол поворота колес при включении системы 40 рулевого управления неизвестен (не может быть получен с датчика потока). Оценка абсолютного угла поворота колес (этап 230) и оценка относительного угла поворота колес после включения системы (этап 240) далее обрабатываются совместно (этап 250), и на их основе получается высокоточная оценка фактического угла расположения колес 12 по отношению к транспортному средству 10. Поскольку оценка абсолютного угла поворота колес время от времени обновляется (этап 230) и параллельно ей проводится точная оценка относительных изменений (этап 240), точность определения угла поворота колес также повышается.
На фиг.4 показана общая схема способа работы автоматической системы рулевого управления. Изначально транспортное средство находится в режиме ручного рулевого управления (этап 300) и остается в данном режиме до тех пор, пока не будет включена автоматическая система рулевого управления (на этапе 310). При включении автоматической системы 40 рулевого управления на этапе 310, как правило, оператором с помощью выключателя 76 определяются угловая скорость рысканья и скорость транспортного средства (этап 320) и рассчитывается начальная оценка абсолютного угла поворота колес (этап 330). Как только сделана начальная оценка угла поворота колес (этап 330), задействуется автоматическая система рулевого управления (этап 340).
Как только автоматическая система рулевого управления задействована (этап 340), определяются скорость транспортного средства, угловая скорость рысканья и поток в гидравлической системе (этап 350) для уточнения оценки угла поворота колес (этап 360). На практике на этапе 360 уточнения используются результаты последующих измерений угловой скорости рысканья и скорости, на основании которых обновляется оценка абсолютного угла поворота колес, и данные потока, получаемые с датчика 56 потока, для учета относительного изменения угла поворота колес после включения автоматической системы на этапе 310.
После этого контроллер 60 рулевого управления обрабатывает данные угла поворота колес, вместе с прочими данными (скорость, место нахождения, уклон местности и прочие) и выдает выходные сигналы для управления колесами транспортного средства (например, для удержания его на заданном маршруте) (этап 370). Автоматическая система 40 рулевого управления постоянно обновляет значения оценки угла поворота колес (этап 360) и осуществляет рулевое управление транспортным средством (этап 370) до тех пор, пока она не будет выключена (этап 380). Как только система будет выключена, транспортное средство 30 снова перейдет в режим ручного рулевого управления (обратно на этап 300).
Как показано на фиг.1, система 40 рулевого управления может быть включена с помощью выключателя 76, после чего индикаторная панель и/или контроллер 60 рулевого управления обрабатывают данные угловой скорости рысканья, полученные с гироскопа 72, и линейной скорости, полученные с антенн GNSS, в результате чего вырабатывается начальная оценка абсолютного угла расположения колес 12. Как только получена начальная оценка, контроллер 60 рулевого управления может начинать выдачу сигналов управления для включения блока 54 клапанов (посредством электрических кабелей 58 и гидравлических исполнительных элементов 66). Блок 54 клапанов направляет нужным образом жидкость в гидросистеме для поворота колес 12 на нужный угол (создавая необходимое давление в трубопроводах 42 или 44).
За счет использования данных угловой скорости рысканья, линейной скорости транспортного средства и потока жидкости в гидравлической системе система может достаточно точно определить угол поворота колес, и при этом лишена трудностей, типичных для установки датчиков непосредственного измерения угла расположения колес.
То, что датчик 56 потока расположен во вновь установленных трубопроводах 42 и 44, установленных параллельно штатной гидравлической системе, означает, что он не будет регистрировать поток, когда транспортное средство находится в режиме ручного рулевого управления (то есть он не будет регистрировать поток, пока блок 54 клапанов не будет активирован электрогидравлическими приводными элементами. Это означает, что датчик 56 потока может регистрировать только относительные изменения угла поворота колес, пока включена система автоматического рулевого управления. С другой стороны, благодаря тому, что датчик потока установлен параллельно штатным трубопроводам рулевого управления, система ручного рулевого управления не пострадает даже в случае отказа датчика (и даже, если он заблокирует трубопровод). Это не только делает предлагаемую систему более безопасной по сравнению с типичными аналогичными системами, в которых используется только датчик потока жидкости в гидравлическом приводе, но также снимает необходимость установки аварийных перепускных клапанов в обход датчика потока. При этом система обеспечивает практически такую же точность, как ранее использовавшиеся системы измерения потока, будучи более простой в установке, но обладающей повышенной надежностью и безопасностью.
В качестве угла поворота колес может определяться и использоваться фактический угол расположения колеса транспортного средства относительно корпуса транспортного средства, радиус кривизны траектории, вдоль которой движется транспортное средство, или иной аналогичный параметр. Подразумевается, что определение угла поворота колес может производиться на различных типах транспортных средств, включая, например, транспортные средства с рулевым управлением типа Аккермана (показано на фиг.1), рулевым управлением, воздействующим на задние колеса, дифференциальным управлением колесами на противоположных бортах и прочих.
Следует понимать, что терминология, употребляемая выше, используется только в целях описания, и если явно не указано иное, не должна рассматриваться как ограничивающая.
Сведущим в данной области техники будет понятно, что упомянутые выше компоненты транспортного средства 10, как правило, штатно установлены на транспортном средстве и, соответственно, могут иметься расхождения между типами и конфигурациями таких компонентов, установленных на транспортных средствах различных типов и производителей. Сведущим в данной области техники будет очевидно, что основополагающие принципы и идея настоящего изобретения сохраняются, даже если в конкретном случае требуются незначительные изменения или доработки.
Термины «определение» и «оценка» не следует интерпретировать в строгом их смысле, а скорее наоборот, следует понимать, что используются, как взаимно заменяющие друг друга (то есть определение может быть оценкой, а оценка может быть определением).
Если из контекста явно не следует иное, упоминание структурной части, компонента или этапа (или подобного понятия), не следует понимать, как относящееся только к данной структурной части, компоненту или этапу, а скорее может относится к одной или более упоминаемым структурным частям, компонентам, этапам и так далее.
В настоящем описании подразумевается, что термины «содержит», «содержащий», «включает», «включающий» и им подобные означают не исключающее включение, то есть означают, что способ, система или устройство, содержащие перечисляемые далее элементы, включают не исключительно данные элементы, а могут также включать прочие, не перечисляемые элементы.
Группа изобретений относится к способу определения угла поворота колес транспортного средства, способу определения угла поворота колес транспортного средства для использования в автоматической системе рулевого управления, системе рулевого управления, определяющей угол поворота колес транспортного средства и набору для автоматического рулевого управления. Способ определения угла поворота колес транспортного средства, в частности сельскохозяйственного транспортного средства, заключается в определении угловой скорости рысканья, определении скорости транспортного средства, определении потока жидкости в гидравлическом узле рулевого управления, подключенном параллельно гидравлическому контуру ручного рулевого управления транспортного средства, и обработке данных угловой скорости рысканья, скорости и потока жидкости для определения угла поворота колес транспортного средства. Обеспечивается повышение надежности и безопасности. 4 н. и 18 з.п. ф-лы, 4 ил.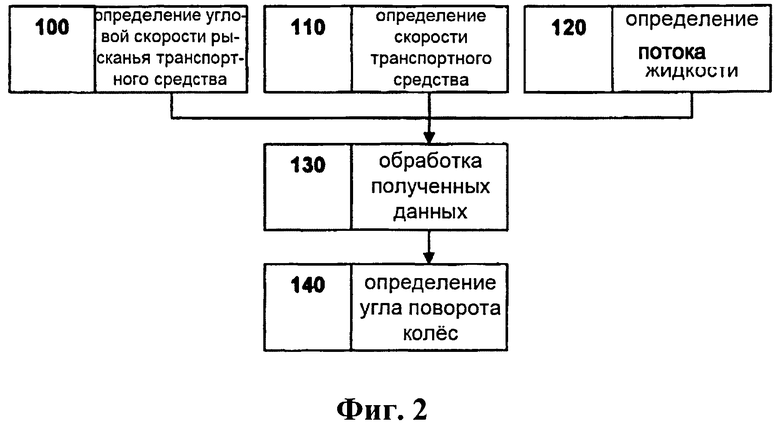
1. Способ определения угла поворота колес транспортного средства, содержащий этапы, на которых:
определяется угловая скорость рысканья транспортного средства
определяется скорость транспортного средства;
определяется поток жидкости в гидравлическом узле рулевого управления, подключенном параллельно гидравлическому контуру ручного рулевого управления транспортного средства;
и обрабатываются данные угловой скорости рысканья, скорости и потока жидкости для определения угла поворота колес транспортного средства.
2. Способ по п.1, при котором этап обработки содержит использование данных угловой скорости рысканья и скорости для выработки абсолютной оценки угла поворота колес.
3. Способ по п.1, при котором этап обработки содержит использование данных потока жидкости для выработки относительной оценки угла поворота колес.
4. Способ по п.1, дополнительно содержащий этап, на котором производится начальная оценка угла поворота колес на основе определяемых угловой скорости рысканья и скорости транспортного средства.
5. Способ определения угла поворота колес транспортного средства для использования в автоматической системе рулевого управления, содержащий этапы, на которых:
включают автоматическую систему рулевого управления;
проводится начальная оценка угла поворота колес, содержащая этапы, на которых:
определяется угловая скорость рысканья транспортного средства;
определяется скорость транспортного средства;
и обрабатываются результаты определения угловой скорости рысканья и скорости транспортного средства для выработки начальной абсолютной оценки угла поворота колес;
затем следуют повторяющиеся этапы, на которых:
определяется угловая скорость рысканья транспортного средства;
определяется скорость транспортного средства;
определяется поток жидкости в гидравлическом узле рулевого управления, подключенном параллельно гидравлическому контуру ручного рулевого управления транспортного средства;
обрабатываются данные угловой скорости рысканья и скорости для обновления абсолютной оценки угла поворота колес;
обрабатываются данные потока жидкости для выработки относительной оценки угла поворота колес после включения автоматической системы рулевого управления;
и определяется угол поворота колес транспортного средства на основе абсолютных и относительных оценок.
6. Способ по п.5, дополнительно содержащий этап, на котором определяется положение транспортного средства по отношению к некоторой области.
7. Способ по п.6, дополнительно содержащий этап, на котором проводится слежение за положением транспортного средства по отношению к заданному маршруту.
8. Способ по п.7, дополнительно содержащий этап, на котором подаются сигналы управления, относящиеся к углу поворота колес, для удержания транспортного средства на заданном маршруте.
9. Способ по любому из предшествующих пунктов, при котором этап определения угловой скорости рысканья транспортного средства содержит измерение выходного сигнала гироскопического датчика.
10. Способ по любому из пп.1-8, по которому этап определения скорости транспортного средства содержит расчет скорости транспортного средства по данным Глобальной Навигационной Спутниковой Системы (GNSS).
11. Способ по любому из пп.1-8, по которому этап определения потока жидкости в гидравлическом узле рулевого управления содержит использование датчика потока, установленного в гидравлическом трубопроводе между блоком клапанов гидравлического узла рулевого управления, подключенного параллельно контуру ручного рулевого управления транспортного средства, и гидравлическим контуром рулевого управления.
12. Система рулевого управления, определяющая угол поворота колес транспортного средства и содержащая:
блок определения угловой скорости рысканья;
блок определения скорости;
систему управления системой рулевого управления; и
гидравлический узел рулевого управления, подключенный параллельно гидравлическому контуру ручного рулевого управления транспортного средства, при этом гидравлический узел рулевого управления содержит:
блок гидравлических клапанов, связанный с системой управления системой рулевого управления, для включения потока жидкости в гидравлических трубопроводах, подключенных к гидравлическому контуру рулевого управления;
и датчик потока, установленный по меньшей мере в одном из гидравлических трубопроводов между блоком клапанов и гидравлическим контуром рулевого управления;
при этом система управления системой рулевого управления обрабатывает данные, получаемые с блока определения угловой скорости рысканья, блока определения скорости и датчика потока гидравлического узла рулевого управления для определения угла поворота колес.
13. Система по п.12, в которой система управления системой рулевого управления оценивает угол поворота колес путем обработки значений угловой скорости рысканья, полученного с блока определения угловой скорости рысканья, и скорости, полученного с блока определения скорости, для выработки абсолютной оценки угла поворота колес, и обработки измеренного значения потока, полученного с датчика потока гидравлического узла рулевого управления, для выработки относительной оценки угла поворота колес.
14. Система по п.12 или 13, в которой блок определения угловой скорости рысканья содержит гироскопический датчик.
15. Система по п.12 или 13, в которой блок определения скорости использует данные Глобальной Навигационной Спутниковой Системы (GNSS), получаемые с датчика Глобальной Навигационной Спутниковой Системы (GNSS).
16. Система по п.12 или 13, дополнительно содержащая блок управления системой рулевого управления, который является принудительно включаемым.
17. Система по п.16, в которой блок управления системой рулевого управления используется для удержания транспортного средства на заданном маршруте.
18. Система по п.16, в которой блок управления системой рулевого управления выполнен с возможностью включения потока жидкости в гидравлических трубопроводах, подключенных к гидравлическому контуру ручного рулевого управления транспортного средства.
19. Система по п.18, в которой при включенном блоке управления системой рулевого управления поток имеется только в гидравлических трубопроводах между блоком клапанов и гидравлическим контуром рулевого управления.
20. Система по п.16, в которой при включенном блоке управления системой рулевого управления блок управления системой рулевого управления использует штатные гидравлический насос и резервуар гидравлического контура ручного рулевого управления, имеющиеся на транспортном средстве.
21. Набор для автоматического рулевого управления, для установки на транспортное средство, содержащий:
блок определения угловой скорости рысканья;
блок определения скорости;
систему управления системой рулевого управления;
блок гидравлических клапанов, связанный с системой управления системой рулевого управления, для включения потока жидкости в гидравлических трубопроводах, выполненных с возможностью их подключения к гидравлическому контуру ручного рулевого управления транспортного средства;
и датчик потока, установленный в гидравлическом трубопроводе между блоком клапанов и гидравлическим контуром рулевого управления для измерения потока жидкости в гидравлическом трубопроводе;
при этом система управления системой рулевого управления выполнена с возможностью
приема и обработки данных с блока определения угловой скорости рысканья, блока определения скорости и датчика потока для определения угла поворота колес;
и обработки определяемого значения угла поворота колес для определения выходного сигнала системы управления системой рулевого управления, который должен быть исполнен блоком гидравлических клапанов.
22. Набор для автоматического рулевого управления по п.21, в котором система управления системой рулевого управления выполнена с возможностью обработки значения угловой скорости рысканья, полученного с блока определения угловой скорости рысканья, и скорости, полученного с блока определения скорости, для выработки или обновления абсолютной оценки угла поворота колес; обработки измеренного значения потока, полученного с датчика потока, для выработки относительной оценки угла поворота колес; и обработки значения абсолютных и относительных оценок для определения угла поворота колес транспортного средства.
| US 5267627 A, 07.12.1993 | |||
| US 2005178607 A1, 18.08.2005 | |||
| US 4718685 A, 12.01.1988 | |||
| RU 2008104696 A, 20.08.2005 |

