Область техники, к которой относится изобретение
Изобретение относится к системам регулирования и контроля движения дорожного транспорта и предназначено для обнаружения и видеофиксации нарушений правил дорожного движения транспортными средствами, в том числе для видеофиксации транспортных средств, превышающих скорость.
Уровень техники
Известен фоторадарный комплекс «КРИС», выпускаемый в стационарном [с информацией можно ознакомиться в сети Интернет по адресу http://www.simicon.ru/rus/product/gun/photoradar_kris_c.html] и передвижном [http://www.simicon.ru/rus/product/gun/photoradar_kris_p.html] вариантах. Этот комплекс представляет собой радиолокатор (радар) с узкой диаграммой направленности, совмещенный с ТВ-камерой стандарта PAL, угол обзора которой совпадает с основным лепестком диаграммы направленности радара. Также в конструкцию включен ИК-прожектор для ночной работы и блок обработки информации. Когда в зону контроля въезжает транспортное средство (далее - ТС), радар измеряет его скорость, фиксируется несколько кадров с ТВ-камеры, после чего распознается государственный регистрационный знак (далее - ГРЗ), а наиболее качественная фотография ТС и данные о цели записываются в журнал. Недостатком этого комплекса является то, что он позволяет осуществлять контроль не более двух полос движения ТС (при наличии на них не более одного автомобиля в момент фиксации), а в типовом варианте стационарного размещения (над полосой) - не более одной полосы. Таким образом, для контроля многополосной дороги требуются возведение дорогостоящей конструкции над проезжей частью и установка соответствующего количества фоторадарных датчиков.
Известен фоторадарный комплекс фирмы Sensys (http://www.sensys.se/web/Over view.aspx), Speed Safety System (SSS) содержащий радар, видеоблок, соединенный с ними процессорный блок и осветительный блок. Радар выполнен с возможностью одновременного измерения скорости, дальности и азимута транспортного средства. Видеоблок включает в себя видеокамеру с объективом и модуль управления, выполненный с возможностью управления видеокамерой и объективом. Наблюдение за скоростью целей происходит вплоть до дальности 150 м. На определенном фиксированном расстоянии, удобном для получения высококачественного снимка (обычно порядка 40 м), на так называемой «линии отсчета» фиксируется изображение автомобиля, и его фото вместе с информацией о скорости и местоположении на дороге сохраняется для последующего распознавания номерного знака. Использование многоцелевого радара позволяет измерять параметры нескольких целей одновременно.
К недостаткам данного комплекса можно отнести следующие:
1. В данном комплексе используется камера высокого разрешения. С ростом разрешения падает чувствительность, что ведет к необходимости использования мощной вспышки. Для матрицы высокого разрешения требуется сложная дорогая оптика также высокого разрешения.
2. Для обработки изображения с высоким разрешением (и большим полем обзора) требуются большие компьютерные ресурсы, а значит высокое потребление, тепловыделение, для которого потребуется эффективный теплоотвод. Все это ведет к повышению габаритов, веса и потребляемой мощности. В описании, в частности, указывается, что для размещения оборудования SSS используется специальный монтажный бокс с встроенными блоками питания и кондиционером.
3. Использование в прототипе так называемой «Линии отсчета» - линии, по достижении которой камера получает команду от радара на фотографирование. В описании прототипа указано, что для распознавания используется единственная фотография, полученная на «линии отсчета». Использование для распознавания единственной фотографии существенно повышает требования к компьютерным ресурсам для распознавания. Эти требования могут быть существенно снижены при использовании «коллекций» изображений похожих номерных знаков, которые формируются из результатов распознавания номеров при обработке непрерывного видеопотока. Кроме того, применение коллекций резко повышает достоверность и вероятность распознавания.
4. Фотографирование в одной определенной позиции («Линии отсчета») увеличивает вероятность получения кадра, на котором номерной знак автомобиля на дальней полосе заслоняется автомобилем на ближней полосе.
5. В течение времени наблюдения скорость ТС может меняться, и, в результате, момент фотографирования на «Линии отсчета» может не совпасть с тем моментом, когда скорость цели была максимальной и выше разрешенного порога. Таким образом, часть нарушителей может оказаться необнаруженными.
В качестве прототипа выбран фоторадарный комплекс «Стрелка»,
использующий «Способ определения скорости движения и координат транспортных средств с последующей их идентификацией и автоматической регистрацией нарушений правил дорожного движения, и устройство для его осуществления» [патент РФ на изобретение № 2382416, опубл. 20 февраля 2010 г.]. Данный фоторадарный комплекс содержит радар, видеокамеру распознавания ГРЗ и блок управления и обработки данных. Радар включает в себя модуль обработки сигналов, обеспечивающий вычисление скорости и дальности всех ТС, находящихся на выбранном участке дорожного полотна, а данные с видеокамеры панорамного обзора совместно с данными радара используются для получения скоростей и координат ТС, их идентификации и передачи данных для автоматической регистрации нарушений Правил дорожного движения.
Данный комплекс также позволяет одновременно контролировать до 4 полос движения с помощью видеокамеры высокого разрешения с широкоугольным объективом. Причем для установки комплекса не требуется строительство специальных несущих конструкций над дорогой, возможна установка на консольном кронштейне на столбе, рядом с краем проезжей части.
Принципиальная особенность этого устройства - измерение скорости и фотографирование (с распознаванием номеров) производятся всегда в разное время. Определение полосы движения, по которой движется автомобиль, производится в результате анализа видеопотока, получаемого при съемке видеокамерой. Определение дальности и скорости производится с помощью импульсного радиолокатора. Таким образом, система обеспечивает определение местоположения автомобиля в дальней зоне (на расстоянии 300-500 м от точки съемки). Фотографирование для распознавания номерных знаков происходит с расстояния порядка 50 м, т.е. существенно позже, после определения координат и скорости автомобиля. Привязка обнаруженного на большом расстоянии движущегося автомобиля к его фотографии крупным планом происходит посредством отслеживания траектории движения. Перемещение автомобиля из дальней зоны, где производится измерение скорости, но номерной знак неразличим, в ближнюю зону, где фотографируются и распознаются номера, отслеживается посредством анализа видеоизображения, получаемого с камеры высокого разрешения.
Таким образом, распознавание номерных знаков и корректное присвоение измеренной скорости к идентифицированной цели производится по результатам компьютерного анализа изображения цели. В прототипе получение качественного изображения целей на многополосной дороге достигается применением ТВ-камеры высокого разрешения, что неизбежно ведет к необходимости применения мощного быстродействующего компьютера и сверхмощной вспышки для получения изображения на телекамере. По материалам сайта http://td-str.ru/file.aspx?id=16233 общий вес прибора превышает 90 кг, объем - около 0,5 куб.м, потребляемая мощность - около 1 кВт.
Таким образом, ключевой проблемой имеющихся в настоящее время решений является техническое противоречие между необходимостью получения высокого качества изображения и стремлением сократить компьютерные и энергетические ресурсы (быстродействие, мощность, габариты), необходимые для его получения и обработки.
Задачей настоящего изобретения является создание комплекса видеофиксации и измерения скорости движения и координат транспортных средств, обеспечивающего достоверное распознавание номерных знаков ТС-нарушителей на дороге с количеством полос не менее четырех непосредственно в момент измерения при минимальных энергетических и компьютерных затратах, минимальных габаритах комплекса.
Раскрытие изобретения
Для решения поставленной задачи предлагается комплекс видеофиксации и измерения скорости движения и координат транспортных средств, содержащий радар, видеокамеру, включающую в себя светочувствительный сенсор и электронный модуль, объектив, модуль управления, выполненный с возможностью управления видеокамерой и объективом, процессорный блок, связанный с радаром и видеокамерой, а также осветительный блок. В отличие от прототипа радар выполнен с возможностью одновременного измерения скоростей и координат всех транспортных средств, находящихся в зоне контроля видеокамеры, процессорный блок выполнен с возможностью автоматического распознавания изображений номерных знаков, полученных с видеокамеры, одновременно с измерениями радара, причем зона контроля видеокамеры охватывает не менее четырех полос движения, а изображение номерного знака содержит не менее N пикселей по ширине, где N определяется по формуле

где U - геометрическая ширина номерного знака;
S - геометрическая ширина линий, которыми выполнено изображение символов на номерном знаке.
В предпочтительном варианте размеры светочувствительного сенсора видеокамеры, его разрешение, фокусное расстояние объектива и расстояние до объекта съемки выбраны исходя из соотношения
где f - фокусное расстояние объектива;
U - геометрическая ширина номерного знака;
Q - разрешение сенсора по горизонтали;
R - расстояние до объекта съемки;
2m - ширина рабочей зоны светочувствительного сенсора.
Предпочтительно рабочая зона светочувствительного сенсора составляет половину его общей площади, другая половина которой защищена от попадания света.
Предпочтительно светочувствительный сенсор имеет зону распознавания, составляющую от 0,4 от 0,8 рабочей зоны сенсора в зависимости от размеров и разрешения светочувствительного сенсора, характеристик объектива и ширины контролируемой дороги.
Видеокамера может быть выполнена с возможностью обеспечения наблюдения за транспортным средством на длине пробега L, большей минимально возможной длины пробега L0 транспортного средства в зоне контроля, необходимой для автоматического распознавания номерного знака транспортного средства, где L0 определяется по формуле

где М - количество фотоизображений автомобиля в зоне контроля;
V - скорость автомобиля, м/с;
F - частота кадров видеокамеры, кадр/с.
Светочувствительный сенсор видеокамеры предпочтительно размещен под углом к ее оптической оси, причем угол наклона рассчитан по формуле
θ - угол между нормалью к плоскости светочувствительного сенсора и оптической осью объектива, рад;
f - фокусное расстояние объектива;
Н - высота установки камеры над дорогой;
β - угол наклона оптической оси объектива к плоскости дороги.
Длина L пробега автомобиля в зоне контроля на первой (четвертой) полосе определяется при этом выражением
<a> в этом выражении определяется из условия равенства пробегов на первой L1 и четвертой L2 полосах движения и составляет

где 

W=wp(n-1),
γ - угол между проекцией оптической оси объектива на плоскость дороги и направлением движения транспорта,
2n - высота рабочей зоны светочувствительного сенсора,
Wp - ширина одной полосы движения на дороге,
n - количество полос на проезжей части дороги.
Предпочтительно видеокамера установлена с возможностью регулирования углов ее наклона, крена и поворота.
Светочувствительный сенсор видеокамеры предпочтительно выполнен с возможностью регулирования уровня усиления для различных его областей в зависимости от перепада освещенности зоны контроля.
Радар может быть установлен под углом к оптической оси объектива видеокамеры.
Комплекс может дополнительно содержать иллюминатор для защиты объектива от загрязнений.
Осветительный блок предпочтительно содержит основной инфракрасный прожектор, синхронизированный с видеокамерой.
Основной инфракрасный прожектор предпочтительно содержит множество узконаправленных прожекторов, сумма диаграмм направленности которых составляет диаграмму направленности основного прожектора.
В предпочтительном варианте основной инфракрасный прожектор установлен с возможностью обеспечения равномерной засветки зоны контроля.
В предпочтительном варианте комплекс дополнительно снабжен многофункциональным жидкокристаллическим дисплеем для настройки положения камеры и управления параметрами комплекса.
Комплекс также может быть дополнительно снабжен интерфейсом пользователя для настройки положения видеокамеры.
Техническим результатом является обеспечение возможности определения параметров движения (скорости и координат) транспортных средств с одновременным распознаванием номерных знаков для всех ТС, находящихся в зоне контроля на дороге с количеством полос не менее четырех.
Выбор параметров комплекса в соответствии с предложенными аналитическими выражениями позволяет при сокращении потребляемых энергетических, компьютерных ресурсов и габаритов повысить достоверность распознавания.
Краткое описание чертежей
На Фиг.1 показана блок-схема комплекса видеофиксации и измерения скорости движения и координат транспортных средств.
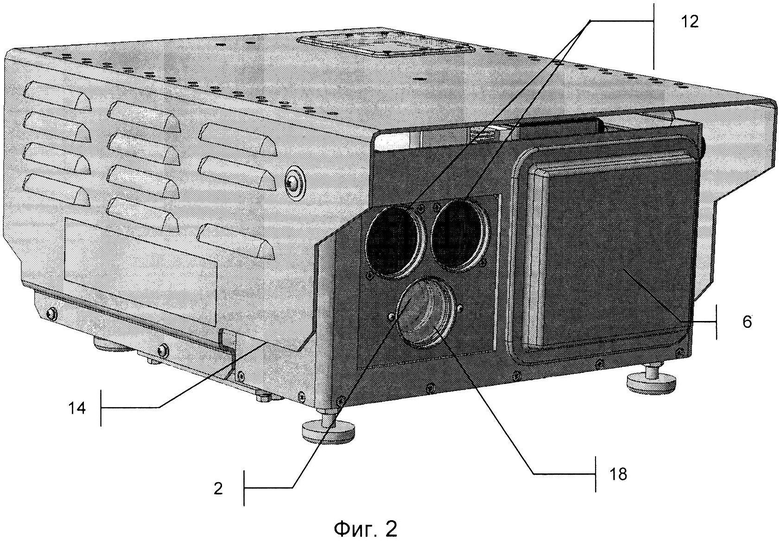
На Фиг.2 показан общий вид спереди комплекса видеофиксации и измерения скорости движения и координат транспортных средств.
На Фиг.3 показан общий вид сзади комплекса видеофиксации и измерения скорости движения и координат транспортных средств.
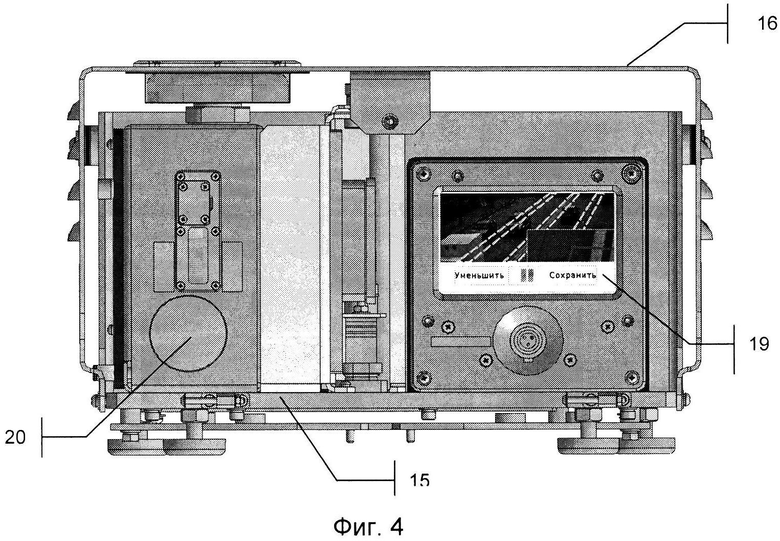
На Фиг.4 показан вид комплекса сзади со стороны ЖК-дисплея с настроечным интерфейсом.
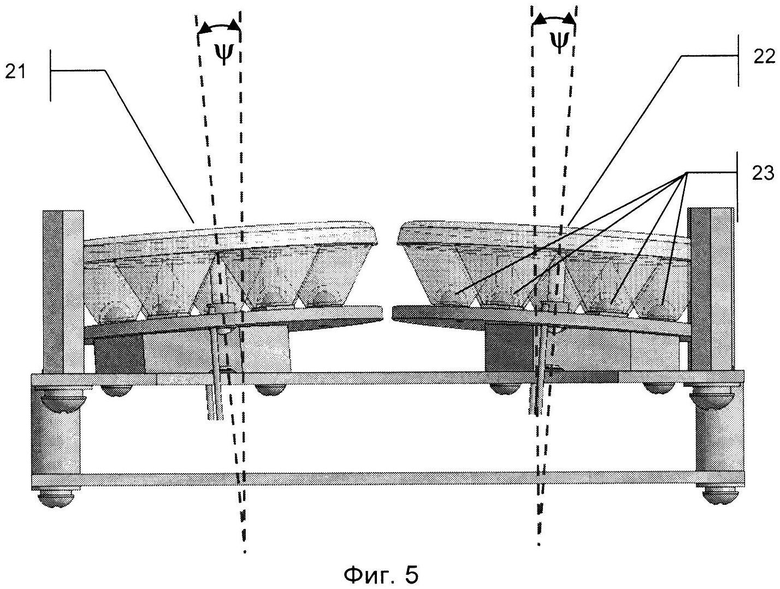
На Фиг.5 показан встроенный инфракрасный прожектор.
На Фиг.6 показан комплекс, закрепленный на опоре.
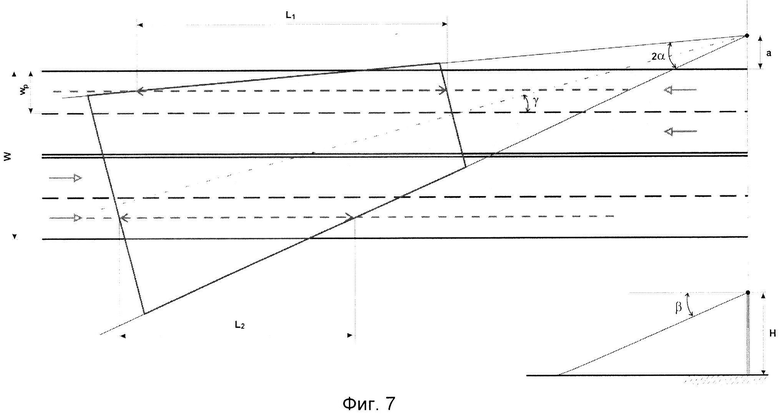
На Фиг.7 показан схематический вид зоны контроля на четырехполосной дороге.
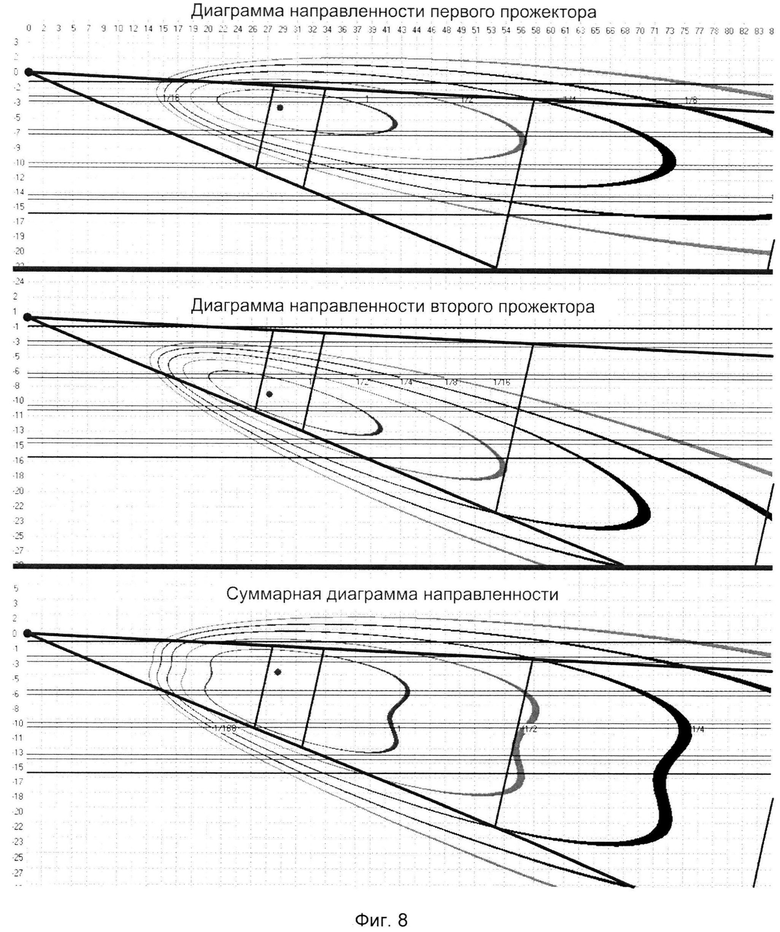
На Фиг.8 показана диаграмма направленности инфракрасного прожектора.
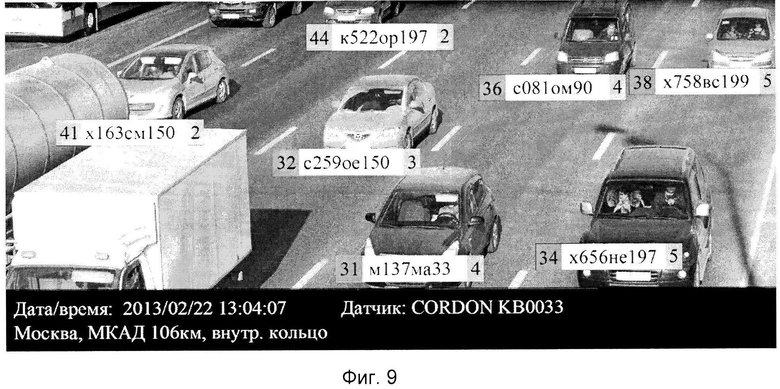
На Фиг.9 показан образец фотографии автомобилей, полученной с помощью комплекса видеофиксации и измерения скорости движения и координат транспортных средств.
Осуществление изобретения
Комплекс на Фиг.1 состоит из видеоблока 1, в состав которого входят широкоугольный объектив 2, видеокамера 3 высокого разрешения, модуль 4 управления и модуль 5 индикации, многоцелевого радара 6 и процессорного блока 7 с программным обеспечением для обработки получаемой информации, распознавания знаков государственной регистрации и формирования фотокадров с измеренными скоростями и номерными знаками. Поле зрения видеокамеры 3 согласовано с зоной контроля радара 6. Видеокамера 3 и радар 6 взаимосвязаны с процессорным блоком 7. Процессорный блок 7 включает в себя измерительный модуль 8, взаимосвязанные с ним модуль 9 управления и устройство 10 хранения, и модуль 11 связи, взаимосвязанный с модулем 9 управления.
Работа радара 6 основана на принципе фазовой пеленгации. Радар 6 включает в себя передатчик, не менее двух приемников и модуль цифровой обработки сигналов. Передатчик излучает комбинированный сигнал, сочетающий линейную частотную модуляцию и частотную манипуляцию, благодаря чему обеспечивается сочетание высокой точности и скорости измерения параметров целей (дальность, скорость) в модуле цифровой обработки. Приемники принимают отраженный сигнал, по разности фаз между сигналами с различных приемников блок цифровой обработки определяется направление на цель. Все данные о целях в уже обработанном виде непрерывно передаются на измерительный модуль комплекса.
Таким образом, данные радара позволяют определить все параметры движения каждой цели в зоне контроля.
На Фиг.2-4 показан общий вид комплекса видеофиксации и измерения скорости движения и координат транспортных средств. Комплекс включает в себя видеоблок 1 со встроенными инфракрасными прожекторами 12, многоцелевой радар 6, процессорный блок 7, а также модуль 13 климат-контроля. Каждый из блоков размещен в отдельном герметичном корпусе, и все они помещены в кожух 14, состоящий из общего основания 15, защитного откидного козырька 16 и откидной крышки 17. Блоки смонтированы на основании 15, снабженном разъемами для их коммутации, и сверху закрыты защитным козырьком 16. Кожух выполнен во всепогодном исполнении. Встроенные инфракрасные прожекторы 12 синхронизированы с видеокамерой 3 и способны обеспечивать визуальную читаемость и автоматическое распознавание стандартных знаков государственной регистрации в любое время суток.
Видеоблок 1 защищен прозрачным иллюминатором 18 (Фиг.2), через который производится наблюдение за дорогой. Степень прозрачности иллюминатора ключевым образом влияет на качество изображения, а следовательно, и на необходимый уровень подсветки, и на необходимые для обработки изображения ресурсы. Таким образом, поддержание заданной прозрачности иллюминатора также является важным фактором экономии ресурсов прибора. Для поддержания чистоты иллюминатора прибор снабжен и средством контроля его прозрачности. В частности, для контроля за прозрачностью внутри прибора в непосредственной близости от внутренней поверхности иллюминатора установлена оптопара (светодиод-фотодиод) таким образом, чтобы отраженный свет на фотоприемник от светодиода попадал только в том случае, если иллюминатор загрязнен. Анализируя уровень отражений, можно определить степень загрязненности иллюминатора, что позволяет выдать сигнал на увеличение мощности подсветки.
Видеоблок 1 снабжен встроенным резистивным сенсорным дисплеем 19 (Фиг.4), предназначенным для настройки и ориентирования комплекса при монтаже. Использование персонального компьютера для настройки комплекса не требуется. Дисплей 19 снабжен подогревом, обеспечивающим возможность функционирования при отрицательных температурах.
Комплекс также включает в себя устройство чтения-записи карт памяти типа SD/SDHC. На карту памяти записываются данные о целях, включающие в себя две фотографии нарушителя, распознанный номер, зафиксированную скорость ТС, метку о движении по полосе общественного транспорта, направление движения, дату и время нарушения, значение максимально допустимой скорости на данном участке дороги, название контролируемого участка, географические координаты, серийный номер датчика. Карта памяти 3D и SIM-карта защищены герметичной крышкой 20 (Фиг.4), обеспечена быстрая замена карт.
Комплекс также содержит встроенный модуль навигации GPS/GLONASS, обеспечивающий определение местонахождения комплекса. Географические координаты комплекса включаются в постановление об административном правонарушении.
Модуль 13 климат-контроля служит для обеспечения работы комплекса в широком диапазоне температур. Обеспечивается удаленный мониторинг состояния внешней системы охлаждения с целью предупреждения отказов.
Осветительный блок (Фиг.5) содержит инфракрасный прожектор 12, состоящий из нескольких (в конкретном примере - из двух) узконаправленных прожекторов 21, 22 на основе ИК-светодиодов 23, сумма диаграмм направленности которых составляет диаграмму направленности прожектора. Осветительный блок способен обеспечивать визуальную читаемость и автоматическое распознавание стандартных знаков государственной регистрации в любое время суток.
Комплекс снабжен высокоскоростным диагностическим каналом связи для осуществления удаленной технической поддержки производителем (включая возможность удаленного обновления встроенного комплекса программного обеспечения).
В комплексе обеспечена поддержка передачи данных как по проводным каналам связи (Ethernet), так и по защищенным беспроводным каналам (VPN-канал через 3G, Wi-Fi). Кроме того, предусмотрена возможность питания как от аккумуляторного бокса со стандартным свинцово-кислотным аккумулятором, так и от сети 220 В.
Комплекс установлен на поворотном устройстве 24 (Фиг.6), обеспечивающем его крепление и нужную ориентацию по отношению к дороге. В заявленном комплексе также обеспечена совместимость с уже используемыми системами крепления фоторадарных комплексов.
Параметры видеоблока ключевым образом влияют на необходимые аппаратно-программные ресурсы и экономичность системы в целом, т.к. именно в видеомодуле происходят формирование и первичная обработка полученного изображения.
Ниже приводятся выражения для расчета технически обоснованных ограничений, учет которых при проектировании позволяет, с одной стороны, обеспечить уверенное распознавание и контроль транспорта на 4-полосной дороге, а с другой стороны, позволяют не допустить избыточности ресурсов при общем построении системы.
Для автоматического распознавания изображение номерного знака должно содержать не менее N пикселей по ширине,
где N определяется по формуле

где U - геометрическая ширина номерного знака;
S - геометрическая ширина линий, которыми выполнено изображение символов на номерном знаке.
Видеокамера содержит светочувствительный сенсор, причем размеры сенсора, его разрешение, фокусное расстояние объектива и расстояние до объекта съемки выбраны исходя из соотношения
где f - фокусное расстояние объектива;
U - геометрическая ширина номерного знака;
Q - разрешение сенсора по горизонтали;
R - расстояние до объекта съемки;
2m - ширина рабочей зоны светочувствительного сенсора.
Такой выбор параметров позволяет обеспечить возможность видеонаблюдения за 4-полосной дорогой с возможностью одновременного контроля всех проходящих по ней транспортных средств. Для достоверного распознавания номерного знака транспортного средства частота кадров, обеспечиваемая камерой, должна выбираться из условия получения такой длины пробега L транспортного средства в зоне контроля, чтобы L>L0, где L0 определяется по формуле
где М - количество фотоизображений автомобиля в зоне контроля;
V - скорость автомобиля, м/сек;
F - частота кадров видеокамеры, кадр/сек.
Поскольку камера расположена наклонно по отношению к плоскости дороги, то для повышения резкости изображения светочувствительный сенсор видеокамеры также размещается наклонно по отношению к оптической оси, причем угол наклона рассчитан по формуле
где θ - угол между нормалью к плоскости светочувствительного сенсора и оптической осью объектива, рад;
f - фокусное расстояние объектива;
Н - высота установки камеры над дорогой;
Р - угол наклона оптической оси объектива к плоскости дороги.
Длина пробега автомобиля в зоне контроля (Фиг.7) на первой L1 (четвертой L2) полосе определяется при этом выражением
<a> в этом выражении определяется из условия равенства пробегов на первой L1 и четвертой L2 полосах движения и составляет
где
W=wp(n-1),
γ - угол между проекцией оптической оси объектива на плоскость дороги и направлением движения транспорта,
2n - высота рабочей зоны светочувствительного сенсора,
Wp - ширина одной полосы движения на дороге,
n - количество полос движения на проезжей части дороги.
Выбор параметров светочувствительной матрицы, фокусного расстояния объектива, частоты кадров и др. характеристик видеосистемы в соответствии с приведенными выражениями позволяет обеспечить одновременный контроль за транспортом на 4-полосной дороге при минимально необходимых аппаратных и программных ресурсах.
Дополнительная возможность повышения качества изображения без увеличения программно-аппаратных ресурсов реализована в приборе за счет раздельного управления уровнем усиления по строкам светочувствительного сенсора. Такое управление позволяет создать адаптивную систему, подстраивающуюся под реально существующий перепад освещенности зоны контроля как в дневное, так и в ночное время. В частности, в верхней зоне светочувствительной матрицы (соответствующей ближней части зоны контроля) усиление может быть установлено меньшим, чем в нижней, для компенсации естественного перепада освещенности, создаваемого ИК-прожектором на дороге.
Прожектор 12, состоящий из нескольких ИК-светодиодов 23 (Фиг.5), включается строго синхронно с видеокамерой, обеспечивая подсветку зоны контроля точно в те моменты, когда срабатывает затвор видеокамеры. Длительность вспышки прожектора устанавливается исходя из длительности экспозиции камеры и регулируется в зависимости от качества изображения.
Существенное влияние на качество изображения имеет и равномерность засветки зоны контроля. Поэтому в конструкции ИК-прожектора предприняты специальные меры для ее обеспечения. В частности, прожектор выполнен из нескольких узконаправленных прожекторов (в конкретном исполнении - два узконаправленных прожектора 21, 22, Фиг.5, ширина диаграммы каждого 10 градусов), причем они расположены так, что угол 2ψ между их оптическими осями в горизонтальной плоскости составляет половину ширины диаграммы направленности, т.е. 2ψ=10 градусов, а в вертикальной - 0. В результате, в конкретном исполнении, при использовании 2 узконаправленных прожекторов суммарная диаграмма направленности прожектора имеет ширину 20 градусов по азимуту и 10 градусов по углу места (Фиг.8 - диаграмма направленности ИК-прожектора). Таким образом, во-первых, обеспечивается равномерная освещенность зоны контроля и, во-вторых, ресурсы прожектора не расходуются для освещения той области дороги, которая находится вне зоны обзора камеры.
Для контроля за правильностью установки прибора, его первичной настройки и регулировки прибор имеет в своем составе жидкокристаллический сенсорный дисплей 19 (Фиг.3, 4), отображающий контролируемый участок дороги, причем прибор установлен на поворотном устройстве 24, обеспечивающем возможность плавной регулировки углов установки и фиксации положения прибора у дороги (Фиг.6).
Дисплей 19 отображает также и специальный настроечный интерфейс (Фиг.4), позволяющий оператору рассчитывать положение маркеров, которые необходимо разместить на дороге для корректной установки прибора. Настройка положения прибора производится затем по этим маркерам. Интерфейс на дисплее также позволяет оператору настроить и основные параметры прибора (расположение и границы полос движения на дороге, пороги скорости и т.п.).
Комплекс на Фиг.1 работает следующим образом. Многоцелевой радар 6 непрерывно передает в измерительный блок 8 данные обо всех целях в зоне контроля: скорость, дистанция, азимут. Видеокамера 3 с широкоугольным объективом 2, согласованным с зоной контроля радара 6, передает видеоматериал в измерительный модуль 8, в котором изображения ТС сопрягаются с данными, полученными от радара 6, таким образом, осуществляется фиксация целей. Далее измерительный модуль 8 осуществляет распознавание ГРЗ проезжающих транспортных средств, выявляет нарушителей, формирует изображения и сохраняет данные о нарушителях в журнал на устройстве 10 хранения. Данные о зафиксированных целях также могут высылаться на внешние устройства через модуль 11 связи, поддерживающий различные технологии проводной и беспроводной передачи данных.
Управление этими процессами осуществляется модулем 9 управления процессорного блока 7. Модуль 4 управления видеоблока 1 управляет работой видеокамеры 3, воспринимает команды пользователя, взаимодействует с ним через модуль 5 индикации с соответствующим интерфейсом.
Блочная конструкция комплекса обеспечивает высокую ремонтопригодность и возможность модернизации.
Комплекс автоматически измеряет скорость всех транспортных средств в зоне контроля (Фиг.9) и сохраняет две фотографии для каждого нарушителя: общим планом (групповой снимок всей зоны контроля с выделением данного нарушителя) и крупным планом (фотография нарушителя с визуально различимым номерным знаком). Комплекс предназначен для работы при неподвижном расположении на высоте от 1 до 10 метров от уровня проезжей части дороги.
Таким образом, заявленный комплекс видеофиксации и измерения скорости движения и координат транспортных средств обеспечивает достоверное распознавание номерных знаков ТС-нарушителей на дороге с количеством полос не менее четырех непосредственно в момент измерения при минимальных энергетических и компьютерных затратах и минимальных габаритах комплекса.


Изобретение относится к системам регулирования и контроля движения дорожного транспорта, а именно к комплексу видеофиксации и измерения скорости движения и координат транспортных средств. Комплекс содержит радар, видеокамеру со светочувствительным сенсором, объектив, модуль управления, процессорный и осветительный блоки. Радар выполнен с возможностью одновременного измерения скорости и координат всех транспортных средств, находящихся в зоне контроля видеокамеры. Процессорный блок выполнен с возможностью автоматического распознавания изображений номерных знаков одновременно с измерениями радара. Зона контроля видеокамеры охватывает не менее четырех полос движения. Изображение номерного знака содержит не менее N пикселей по ширине, где N определяется по формуле , где U - геометрическая ширина номерного знака; S - геометрическая ширина линий, которыми выполнено изображение символов на номерном знаке. Технический результат заключается в обеспечении возможности определения параметров движения (скорости и координат) транспортных средств с одновременным распознаванием номерных знаков для всех ТС, находящихся в зоне контроля на дороге с количеством полос не менее четырех. 12 з.п. ф-лы, 9 ил.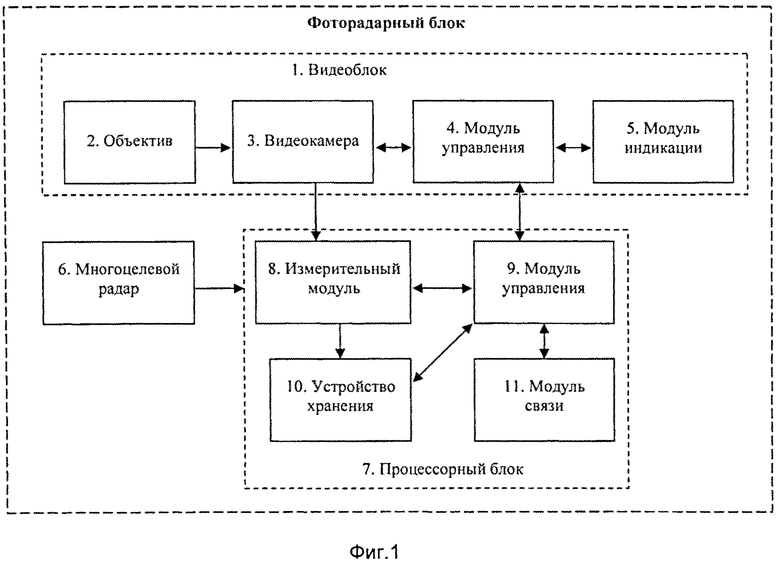
1. Комплекс видеофиксации и измерения скорости движения и координат транспортных средств, содержащий радар, видеокамеру, включающую в себя светочувствительный сенсор, объектив, модуль управления, выполненный с возможностью управления видеокамерой и объективом, процессорный блок, связанный с радаром и видеокамерой, а также осветительный блок, радар выполнен с возможностью одновременного измерения скорости и координат всех транспортных средств, находящихся в зоне контроля видеокамеры, процессорный блок выполнен с возможностью автоматического распознавания изображение номерных знаков, полученных с видеокамеры, одновременно с измерениями радара, причем зона контроля видеокамеры охватывает не менее четырех полос движения, отличающийся тем, что рабочая зона светочувствительного сенсора составляет половину его общей площади, размеры светочувствительного сенсора видеокамеры, его разрешение, фокусное расстояние объектива и расстояние до объекта съемки выбраны исходя из соотношения:
,
где f - фокусное расстояние объектива;
U - геометрическая ширина номерного знака;
Q - разрешение светочувствительного сенсора по горизонтали;
R - расстояние до объекта съемки;
2m - размер светочувствительного сенсора по горизонтали,
а изображение номерного знака содержит не менее N пикселей по ширине, где N определяется по формуле
,
где U - геометрическая ширина номерного знака;
S - геометрическая ширина линий, которыми выполнено изображение символов на номерном знаке.
2. Комплекс по п.1, отличающийся тем, что светочувствительный сенсор имеет зону распознавания, составляющую от 0,4 до 0,8 рабочей зоны сенсора в зависимости от размеров и разрешения светочувствительного сенсора, характеристик объектива и ширины контролируемой дороги.
3. Комплекс по п.1, отличающийся тем, что видеокамера выполнена с возможностью обеспечения наблюдения за транспортным средством на длине пробега L, большей минимально возможной длины пробега L0 транспортного средства в зоне контроля, необходимой для автоматического распознавания номерного знака транспортного средства, где L0 определяется по формуле
,
где М - количество фотоизображений автомобиля в зоне контроля;
V - скорость автомобиля, м/с;
F - частота кадров видеокамеры, кадр/с.
4. Комплекс по п.1, отличающийся тем, что светочувствительный сенсор видеокамеры размещен под углом к ее оптической оси, причем угол наклона рассчитан по формуле
,
где θ - угол между нормалью к плоскости светочувствительного сенсора и оптической осью объектива;
f - фокусное расстояние объектива;
Н - высота установки видеокамеры над дорогой;
β - угол наклона оптической оси объектива к плоскости дороги.
5. Комплекс по п.1, отличающийся тем, что видеокамера установлена с возможностью регулирования углов ее наклона, крена и поворота, при этом длина L пробега автомобиля в зоне контроля определяется выражением
,
<a> - вычисляется из условия равенства пробегов по первой и четвертой полосам и определяется выражением
,
где ,
,
,
,
 ,
,
γ - угол между проекцией оптической оси объектива на плоскость дороги и направлением движения транспорта,
2n - высота рабочей зоны светочувствительного сенсора,
Wp - ширина одной полосы движения на дороге,
n - количество полос на проезжей части дороги.
6. Комплекс по п.1, отличающийся тем, что светочувствительный сенсор видеокамеры выполнен с возможностью регулирования уровня усиления для различных его областей в зависимости от перепада освещенности зоны контроля.
7. Комплекс по п.1, отличающийся тем, что радар установлен под углом к оптической оси объектива видеокамеры.
8. Комплекс по п.1, отличающийся тем, что он дополнительно содержит иллюминатор для защиты объектива от загрязнений.
9. Комплекс по п.1, отличающийся тем, что осветительный блок содержит инфракрасный прожектор, синхронизированный с видеокамерой.
10. Комплекс по п.9, отличающийся тем, что инфракрасный прожектор содержит множество узконаправленных прожекторов, сумма диаграмм направленности которых составляет диаграмму направленности основного прожектора.
11. Комплекс по п.9, отличающийся тем, что инфракрасный прожектор установлен с возможностью обеспечения равномерной засветки зоны контроля.
12. Комплекс по п.1, отличающийся тем, что он дополнительно снабжен многофункциональным жидкокристаллическим дисплеем для настройки положения камеры и управления параметрами комплекса.
13. Комплекс по п.1, отличающийся тем, что он дополнительно снабжен интерфейсом пользователя для настройки положения видеокамеры.
| Газовая горелка для водоподогревателей проточного типа | 1956 |
|
SU113398A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Прядильный станок | 1927 |
|
SU9042A1 |
| Горелка для жидкого топлива для резки и сварки под водой | 1933 |
|
SU52226A1 |
| WO 8707057 A1, 19.11.1987 | |||

