Изобретение относится к средствам снижения магнитного поля подводного или надводного объекта, в частности к автоматическим регуляторам его магнитного поля.
Известны автоматические регуляторы магнитного поля объекта, которые, управляя установленными на нем источниками компенсирующего электромагнитного поля, обеспечивают требуемый уровень результирующего магнитного поля объекта. Примером таких регуляторов могут служить регуляторы: УРТ-860, ДВС-860, РТКП, «Кадмий-Р ».
Известен также автоматический регулятор магнитного поля подводного или надводного объекта, реализующий возможность автоматизированной настройки его системы компенсации, - прототип предлагаемого изобретения (патент на изобретение №2416547 от 25.08.2009), включающий в себя блоки приема сигналов от навигационного комплекса, от датчиков магнитного поля Земли или датчиков магнитного поля объекта, блок формирования алгоритма управления системой автоматического управления магнитным полем объекта, блоки управления компенсаторами магнитного поля объекта, блок распределения сигналов управления эффективностью компенсаторов магнитного поля объекта.
Устройства, входящие в состав блоков регулятора магнитного поля, являются источниками пульсаций магнитного поля объекта. При этом отдельные гармоники этих пульсаций достигают значительной величины, что является существенным недостатком регулятора.
Задачей предлагаемого изобретения является уменьшение пульсаций магнитного поля объекта при компенсации его магнитного поля.
Поставленная задача решается благодаря тому, что автоматический регулятор магнитного поля подводного или надводного объекта, включающий блок приема сигналов от навигационного комплекса, от датчиков магнитного поля Земли или датчиков магнитного поля объекта, блок формирования алгоритма управления системы автоматического управления магнитным полем объекта, компенсаторы магнитного поля объекта, блоки управления компенсаторами магнитного поля объекта, блок распределения сигналов управления эффективностью компенсаторов магнитного поля объекта, имеет следующие отличия - дополнительно в цепь токов обмоток размагничивания включены датчики гармоник токов подавляемых пульсаций, к выходам которых подключены блоки гальванической развязки, к выходам которых подключены фильтры гармоник токов подавляемых пульсаций, к выходам которых подключены блоки регулировки фаз гармоник пульсаций, к выходам которых подключены блоки усиления и согласования сигналов с параметрами соответствующей обмотки размагничивания.
Введение этих блоков позволяет уменьшить пульсации магнитного поля объекта с регулятором, обеспечивающим компенсацию его магнитного поля.
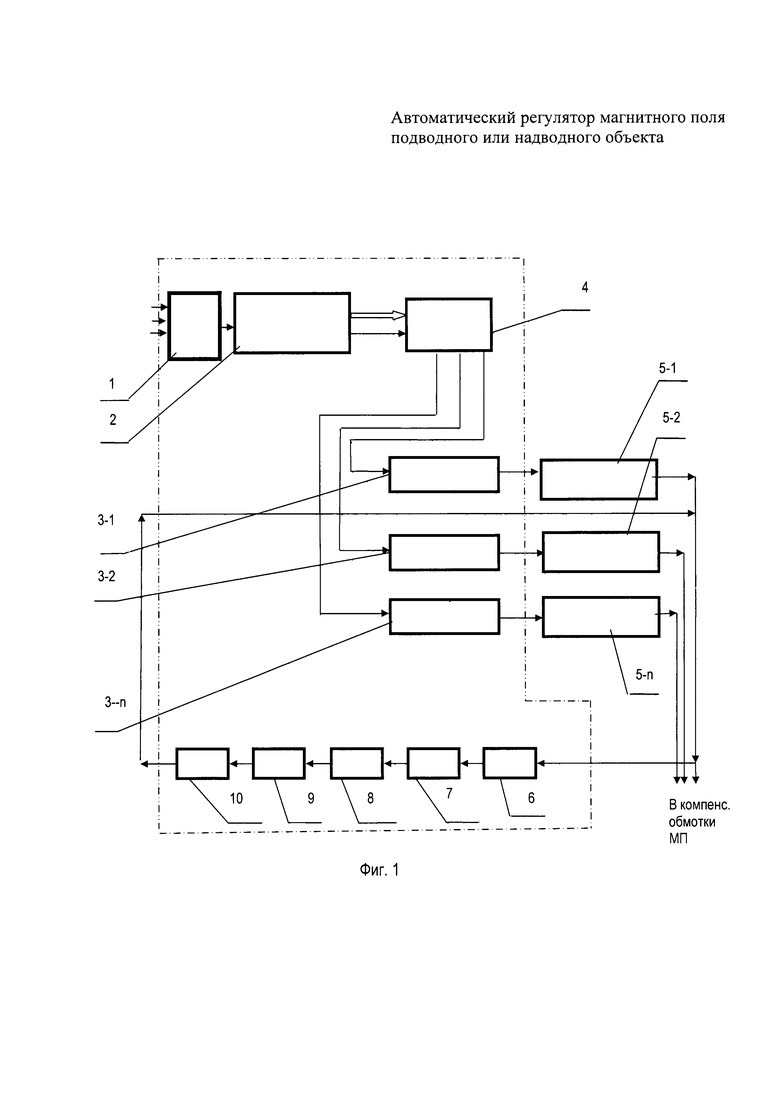
Сущность изобретения поясняется фиг. 1, на которой представлена блок-схема автоматического регулятора магнитного поля подводного или надводного объекта, обеспечивающего уменьшение (подавление) пульсаций в компенсационных обмотках, получающих питание от управляемых компенсаторов, например компенсатора 5-1.
На фиг. 1
1 - блок приема сигналов;
2 - блок формирования алгоритма управления;
3-1, 3-2…3-n - блоки управления компенсаторами;
4 - блок распределения сигналов управления;
5-1, 5-2…5-n - компенсаторы;
6 - датчики гармоник токов;
7 - блоки гальванической развязки;
8 - фильтры гармоник токов;
9 - блоки регулировки фаз токов;
10 - блоки усиления и согласования.
Автоматический регулятор магнитного поля подводного или надводного объекта состоит из блока приема сигналов 1 от навигационного комплекса, от датчиков магнитного поля Земли или датчиков магнитного поля объекта (на фиг. 1 не показано), блока формирования алгоритма управления 2 системой автоматического управления магнитным полем объекта, блоков управления компенсаторами 3-1, 3-2…3-n магнитного поля, блока распределения сигналов 4 управления эффективностью компенсаторов магнитного поля, компенсаторов 5-1, 5-2…5-n магнитного поля, датчиков гармоник токов 6 подавляемых пульсаций, блоков гальванической развязки 7, фильтров гармоник токов 8 подавляемых пульсаций, блоков регулировки фаз токов 9, компенсирующих пульсации, блоков усиления токов, компенсирующих пульсации в обмотках размагничивания и согласования выходов этих блоков с параметрами размагничивающих обмоток 10.
Рассмотрим работу предлагаемого автоматического регулятора магнитного поля на примере осуществления подавления пульсаций в компенсационной обмотке, получающей питание от компенсатора 5-1.
На вход блока приема сигналов 1 поступают сигналы от навигационного комплекса, от датчиков магнитного поля Земли или датчиков магнитного поля объекта. С выхода этого блока сигналы поступают на вход блока формирования алгоритма управления 2, в котором по программе реализуется требуемый алгоритм управления системой автоматического управления магнитным полем объекта. С выхода этого блока сигналы поступают в блок распределения сигналов 4, который в режиме автоматизированной настройки корректирует их в соответствии с командами, полученными от блока формирования алгоритма управления. С выхода блока распределения откорректированные сигналы поступают на входы блока управления компенсаторами 3-1, обеспечивающие необходимую эффективность компенсатора 5-1 магнитного поля объекта соответственно.
Датчик гармоник токов 6, установленный в цепи компенсирующей обмотки, получающей питание от компенсатора 5-1, управляемого блоком управления компенсатором 3-1, измеряет пульсации тока в этой обмотке и вырабатывает необходимый управляющий сигнал. Этот сигнал через блоки гальванической развязки 7 цепи компенсатора 5-1 и цепи, реализующей подавление пульсаций тока в этой обмотке, поступает на вход фильтра гармоник тока 8, выделяющих гармоники пульсаций тока в обмотке размагничивания.
Сигналы, соответствующие величине выделенных гармоник, поступают в блоки регулировки фаз 9 токов, обеспечивающих сдвиг фазы тока, компенсирующего пульсации в обмотке размагничивания. С выхода блоков регулировки фаз 9 эти сигналы поступают на вход блока усиления и согласования 10.
Блок усиления и согласования 10 обеспечивает усиление токов, компенсирующих пульсации в обмотке размагничивания, и согласование выходов этих блоков с параметрами обмотки размагничивания. С выхода блока усиления и согласования 10 сигналы поступают в компенсационную обмотку магнитного поля (МП) объекта.
Аналогично происходит осуществление подавления пульсаций в компенсационной обмотке, получающей питание от компенсаторов 5-2…5-n.
Использование предлагаемого изобретения позволяет уменьшить (подавить) пульсации магнитного поля объекта, компенсация которого обеспечивается регулятором, реализующим его электромагнитную компенсацию.
Таким образом, предлагаемый автоматический регулятор магнитного поля подводного или надводного объекта за счет дополнительного включения датчиков гармоник токов подавляемых пульсаций, блоков гальванической развязки, фильтров гармоник токов подавляемых пульсаций, блоков регулировки фаз токов, компенсирующих пульсации, и блоков усиления токов, подавляющих пульсации в обмотках размагничивания, и согласование выходов этих блоков с параметрами обмоток размагничивания обеспечивает достижение заявляемого технического результата, что выгодно отличает его от прототипа.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР МАГНИТНОГО ПОЛЯ ПОДВОДНОГО ИЛИ НАДВОДНОГО ОБЪЕКТА | 2012 |
|
RU2516915C2 |
| РЕГУЛЯТОР МАГНИТНОГО ПОЛЯ НАДВОДНОГО (ПОДВОДНОГО) ОБЪЕКТА | 2011 |
|
RU2477494C2 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР МАГНИТНОГО ПОЛЯ ПОДВОДНОГО ИЛИ НАДВОДНОГО ОБЪЕКТА | 2009 |
|
RU2416547C1 |
| СПОСОБ ЦИФРОВОЙ КОМПЕНСАЦИИ ЭЛЕКТРОМАГНИТНОЙ ДЕВИАЦИИ ДЛЯ МАГНИТНОГО ЭЛЕКТРОННОГО КОМПАСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2210060C2 |
| ПОДВИЖНЫЙ МОРСКОЙ АППАРАТ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2011 |
|
RU2478059C1 |
| ИСТОЧНИК ПИТАНИЯ ДЛЯ СТАНЦИЙ БЕЗОБМОТОЧНОГО РАЗМАГНИЧИВАНИЯ КОРАБЛЕЙ | 2014 |
|
RU2552625C1 |
| Арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2023 |
|
RU2836682C2 |
| ИСТОЧНИК ПИТАНИЯ ЭЛЕКТРОМАГНИТНЫХ КОМПЕНСАТОРОВ | 2005 |
|
RU2289192C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| Способ автоматического размагничивания кораблей | 2021 |
|
RU2771186C1 |
Автоматический регулятор магнитного поля подводного или надводного объекта содержит блок приема сигналов от навигационного комплекса, датчиков магнитного поля Земли или датчиков магнитного поля объекта, блок формирования алгоритма управления системы автоматического управления магнитным полем объекта, блоки управления компенсаторами магнитного поля объекта, компенсаторы, блок распределения сигналов управления, датчики гармоник токов, блок гальванической развязки, фильтры гармоник токов подавляемых пульсаций, блоки регулировки фаз токов, блоки усиления и согласования сигналов с параметрами соответствующей обмотки размагничивания. Обеспечивается уменьшение пульсаций магнитного поля объекта при компенсации его магнитного поля. 1 ил. 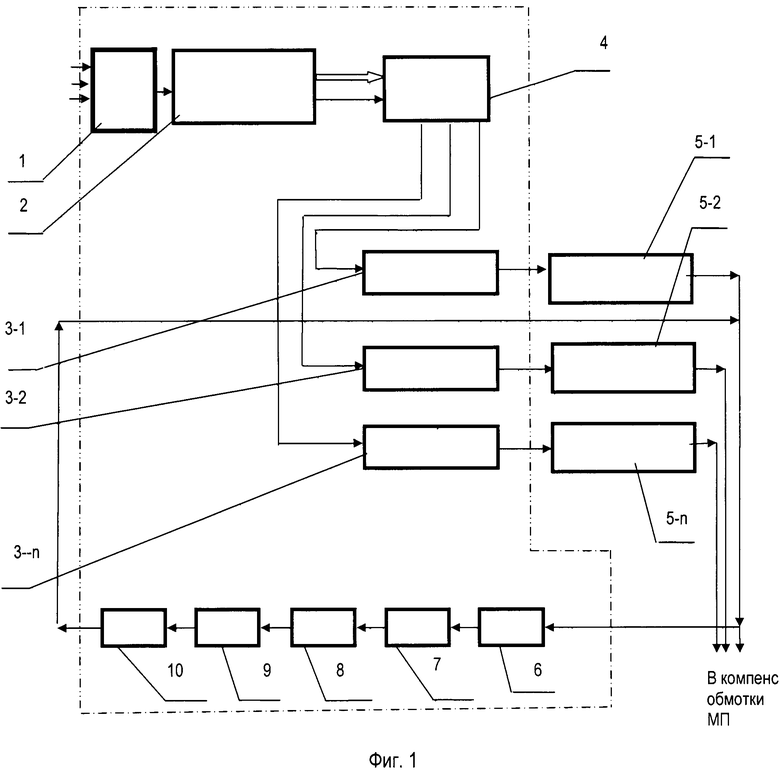
Автоматический регулятор магнитного поля подводного или надводного объекта, включающий блок приема сигналов от навигационного комплекса, от датчиков магнитного поля Земли или датчиков магнитного поля объекта, блок формирования алгоритма управления системы автоматического управления магнитным полем объекта, компенсаторы магнитного поля объекта, блоки управления компенсаторами магнитного поля объекта, блок распределения сигналов управления эффективностью компенсаторов магнитного поля объекта, отличающийся тем, что дополнительно в цепь токов обмоток размагничивания включены датчики гармоник токов подавляемых пульсаций, к выходам которых подключены блоки гальванической развязки, к выходам которых подключены фильтры гармоник токов подавляемых пульсаций, к выходам которых подключены блоки регулировки фаз гармоник пульсаций, к выходам которых подключены блоки усиления и согласования сигналов с параметрами соответствующей обмотки размагничивания.
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР МАГНИТНОГО ПОЛЯ ПОДВОДНОГО ИЛИ НАДВОДНОГО ОБЪЕКТА | 2012 |
|
RU2516915C2 |
| РЕГУЛЯТОР МАГНИТНОГО ПОЛЯ НАДВОДНОГО (ПОДВОДНОГО) ОБЪЕКТА | 2011 |
|
RU2477494C2 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР МАГНИТНОГО ПОЛЯ ПОДВОДНОГО ИЛИ НАДВОДНОГО ОБЪЕКТА | 2009 |
|
RU2416547C1 |
| KR 101614041 B1, 20.04.2016 | |||
| US 8584586 B1, 19.11.2013. | |||

