Изобретение относится к судовым средствам магнитной защиты надводного (подводного) объекта, в частности к автоматическим регуляторам его магнитного поля.
Известны автоматические регуляторы магнитного поля объекта, которые, управляя установленными на нем источниками компенсирующего электромагнитного поля, обеспечивают требуемый уровень результирующего магнитного поля объекта. В качестве примера могут служить регуляторы: УРТ-860, ДВС-860, РТКП, «Кадмий-Р».
Известен также прототип - «Автоматический регулятор магнитного поля подводных или надводных объектов» (разрешение на выдачу патента №200913 2080/11 (044982) от 25.08.2009 г.).
В прототип включены блоки приема сигналов от навигационного комплекса (НК) и от датчиков магнитного поля Земли (ДЗ) или датчиков магнитного поля объекта (ДО), блок формирования алгоритма управления системой автоматического управления магнитным полем, блоки управления компенсаторами магнитного поля, а также блок распределения сигналов управления эффективностью этих компенсаторов.
В соответствии с заданным алгоритмом функционирования блок распределения управляет автономными источниками питания секций компенсационных обмоток объекта, обеспечивающих электромагнитную компенсацию его магнитного поля.
Качество магнитной защиты объекта во многом обеспечивается комплексом работ, связанных с настройкой системы компенсации его магнитного поля и предусматривающих:
- измерение и расчет составляющих вектора индукции магнитного поля объекта;
- регулировку ампер-витков секций компенсационных обмоток;
- настройку автоматического регулятора, формирующего сигналы управления источниками питания секций компенсационных обмоток.
Существуют два способа проведения работ:
- на «стопе», путем измерения магнитного поля объекта переносными датчиками на 4-х главных магнитных курсах в соответствии с определенной сеткой точек;
- на «ходу», при измерении и фиксации проходных характеристик на магнитно-измерительном стенде с использованием датчиков, стационарно установленных на дне его акватории (патент №2142143, класса G01R 33/02, B63G 9/06).
Оба способа предусматривают участие оператора - одного или группы специалистов, анализирующих результаты измерений и принимающих решение о требуемой корректировке ампер-витков в соответствующих секциях компенсационных обмоток объекта.
Для реализации указанных операций требуется длительный срок нахождения объекта на магнитно-измерительном стенде. Сокращение срока является одной из важнейших задач при его размагничивании.
Одним из путей решения поставленной задачи является проведение работ по настройке регулятора, наладке системы автоматической компенсации магнитного поля, измерению магнитного поля объекта и обработке результатов измерений во время маневрирования объекта на магнитно-измерительном стенде без непосредственного участия оператора.
Для этого необходимо обеспечить соединение блоков аппаратуры, осуществляющих измерение магнитного поля объекта, и блоков, обрабатывающих результаты этих измерений, с блоками аппаратуры, обеспечивающими управление источниками питания в секциях компенсационных обмоток.
Регулятор-прототип не позволяет реализовать такое соединение и, следовательно, возможность проведения необходимых работ во время маневрирования объекта на магнитно-измерительном стенде без непосредственного участия оператора. Это является существенным недостатком прототипа.
Задачей предлагаемого изобретения является сокращение времени нахождения объекта на магнитно-измерительном стенде за счет уменьшения сроков проведения работ, связанных с наладкой системы электромагнитной компенсации и производимых во время маневрирования объекта на стенде без непосредственного участия оператора.
Цель достигается за счет того, что в автоматическом регуляторе магнитного поля подводного или надводного объекта, включающем блоки:
- приема сигналов от навигационного комплекса и от датчиков магнитного поля объекта или Земли;
- формирования алгоритма управления в системе автоматической компенсации магнитного поля объекта;
- управления компенсаторами магнитного поля объекта;
- распределения сигналов управления эффективностью этих компенсаторов;
дополнительно введен блок, обеспечивающий прием и преобразование сигналов от датчиков магнитного поля, и блок, обеспечивающий прием и преобразование сигналов о текущих координатах объекта и датчиков магнитного поля. Датчики установлены на магнитно-измерительном стенде.
Выход блока для приема и преобразования сигналов датчиков магнитного поля магнитно-измерительного стенда соединен с одним из входов блока формирования алгоритма управления, а выход блока, обеспечивающего прием и преобразование сигналов о координатах объекта и датчиков стенда, соединен с другим входом блока формирования алгоритма управления.
Сущность предлагаемого изобретения поясняется рисунком, на котором представлена блок-схема регулятора управления магнитным полем объекта с указанием основных составляющих:
НК - навигационный комплекс объекта;
ДЗ - датчики магнитного поля Земли, установленные на объекте;
ДО - датчики магнитного поля объекта;
1 - блок приема входных сигналов от НК, ДЗ, ДО;
2 - блок формирования алгоритма управления;
3 - блоки управления электромагнитными компенсаторами;
4 - блок распределения;
5 - электромагнитные компенсаторы;
6 - блок приема и преобразования сигналов о текущих координатах объекта и датчиков магнитного поля;
7 - блок приема и преобразования сигналов от датчиков магнитного поля стенда.
В режиме настройки регулятора и системы электромагнитной компенсации объекта работа осуществляется следующим образом.
В блок приема входных сигналов 1 поступают сигналы от установленных на объекте датчиков ДЗ, ДО или от навигационного комплекса НК. В соответствии с требуемым алгоритмом функционирования, реализуемым в блоке формирования алгоритма управления 2, по заданной программе в блоке вырабатываются управляющие сигналы, поступающие на входы блоков управления электромагнитными компенсаторами 3.
Входной управляющий сигнал, поступающий в каждый из блоков, автоматически корректируется в блоке распределения 4 по командам из блока формирования алгоритма управления 2. Это производится с учетом результатов обработки сигналов, полученных от датчиков магнитного поля магнитно-измерительного стенда, поступающих в него через блок приема и преобразования сигналов 7, и сигналов о текущих координатах объекта и датчиков стенда, поступающих через блок 6. Обработка сигналов производится в соответствии с заданной программой.
Сигналы с выхода блоков управления электромагнитными компенсаторами 3 поступают на входы электромагнитных компенсаторов 5 для формирования требуемого магнитного поля объекта.
Блок приема и преобразования сигналов от датчиков магнитного поля магнитно-измерительного стенда и блок приема и преобразования сигналов о текущих координатах объекта и датчиков стенда, включенные в состав регулятора, при обработке результатов измерений в блоке формирования алгоритма управления по заданной программе, позволяют во время маневрирования объекта на стенде осуществлять необходимое воздействие на электромагнитные компенсаторы. Это обеспечивает настройку регулятора магнитного поля объекта и системы его электромагнитной компенсации без непосредственного участия оператора.
Наладка системы электромагнитной компенсации объекта, реализуемая во время его маневрирования на стенде при использовании указанных блоков без непосредственного участия оператора, позволяет существенно сократить срок нахождения объекта на магнитно-измерительном стенде.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР МАГНИТНОГО ПОЛЯ ПОДВОДНОГО ИЛИ НАДВОДНОГО ОБЪЕКТА | 2009 |
|
RU2416547C1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР МАГНИТНОГО ПОЛЯ ПОДВОДНОГО ИЛИ НАДВОДНОГО ОБЪЕКТА | 2012 |
|
RU2516915C2 |
| СПОСОБ ИЗМЕРЕНИЯ МАГНИТНОГО ПОЛЯ НАДВОДНОГО ИЛИ ПОДВОДНОГО ОБЪЕКТА ПРИ НАЛАДКЕ ЕГО СИСТЕМЫ ЭЛЕКТРОМАГНИТНОЙ КОМПЕНСАЦИИ | 2011 |
|
RU2489727C2 |
| Автоматический регулятор магнитного поля подводного или надводного объекта | 2017 |
|
RU2658241C1 |
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2023 |
|
RU2836682C2 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
Изобретение относится к судовым средствам магнитной защиты надводного (подводного) объекта, в частности к регуляторам магнитного поля объекта. Сущность изобретения заключается в том, что регулятор магнитного поля надводного (подводного) объекта включает блоки приема сигналов от навигационного комплекса и датчиков магнитного поля Земли или датчиков магнитного поля объекта, блок формирования алгоритма управления системы автоматического управления магнитным полем объекта, блоки управления компенсаторами магнитного поля объекта и блок распределения сигналов управления эффективностью этих компенсаторов, при этом в него введен блок, обеспечивающий прием и преобразование сигналов от датчиков магнитного поля, установленных на магнитно-измерительном стенде, и блок, обеспечивающий прием и преобразование сигналов о текущих координатах объекта и датчиков стенда, причем выход блока, обеспечивающего прием и преобразование сигналов от датчиков магнитного поля магнитно-измерительного стенда, соединен с одним из входов блока формирования алгоритма управления, а выход блока, обеспечивающего прием и преобразование сигналов о текущих координатах объекта и датчиков стенда, соединен с другим входом блока формирования алгоритма управления. Технический результат - настройка системы электромагнитной компенсации магнитного поля объекта без непосредственного вмешательства оператора. 1 ил.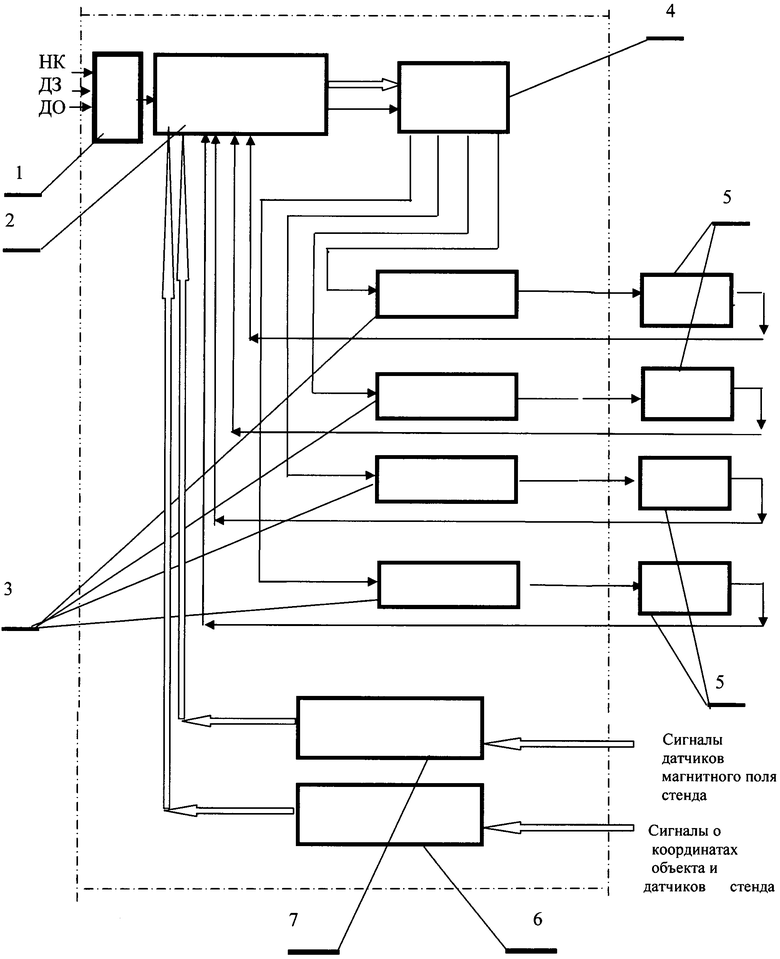
Регулятор магнитного поля надводного (подводного) объекта, включающий блоки приема сигналов от навигационного комплекса и датчиков магнитного поля Земли или датчиков магнитного поля объекта, блок формирования алгоритма управления системы автоматического управления магнитным полем объекта, блоки управления компенсаторами магнитного поля объекта и блок распределения сигналов управления эффективностью этих компенсаторов, отличающийся тем, что в него введен блок, обеспечивающий прием и преобразование сигналов от датчиков магнитного поля, установленных на магнитно-измерительном стенде, и блок, обеспечивающий прием и преобразование сигналов о текущих координатах объекта и датчиков стенда, причем выход блока, обеспечивающего прием и преобразование сигналов от датчиков магнитного поля магнитно-измерительного стенда, соединен с одним из входов блока формирования алгоритма управления, а выход блока, обеспечивающего прием и преобразование сигналов о текущих координатах объекта и датчиков стенда, соединен с другим входом блока формирования алгоритма управления.
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР МАГНИТНОГО ПОЛЯ ПОДВОДНОГО ИЛИ НАДВОДНОГО ОБЪЕКТА | 2009 |
|
RU2416547C1 |
| ИСТОЧНИК ПИТАНИЯ ЭЛЕКТРОМАГНИТНЫХ КОМПЕНСАТОРОВ | 2010 |
|
RU2414740C1 |
| JP 2005195479 А, 21.07.2005 | |||
| DE 4243533 А1, 23.06.1994. | |||

