Арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания
Изобретение относится к области навигационных систем, магнитометрии и технической физике и предназначено для создания сильного постоянного магнитного поля, превышающего по напряженности значение магнитного поля Земли (МПЗ) в точке его размещения, а также к области морской техники для навигационного оборудования морских районов и обеспечения безопасности кораблевождения и определения в море своих координат плавательными средствами (надводными кораблями и судами, подводными лодками и аппаратами, подводными роботами, включая безэкинажные подвижные средства).
Предлагаемое техническое решение может быть использовано при разработке средств создания постоянного магнитного поля в заданной области с известными пространственными и временными характеристиками, применяемых в магнитометрических системах локальной навигации на открытом пространстве и внутри помещений, в том числе, в системах робототехнических устройств, системах навигации и стыковки автономных необитаемых подводных аппаратов, обеспечения полетов и посадки беспилотных летательных аппаратов и в других областях науки и техники.
Известно, что для формирования искусственного постоянного магнитного поля (точнее ею аномалий) в качестве источников последнего могут быть использованы, как постоянные магниты, так и предметы из магнитомягких материалов. Предметы из магнитомягких материалов, попадая в магнитное поле Земли, намагничиваются и ведут себя аналогично магнитным диполям, создающим магнитное поле  где
где  - вектор магнитного момента диполя, а
- вектор магнитного момента диполя, а  - вектор расстояния от диполя до рассматриваемой точки пространства. Данное свойство позволяет применять их в качестве искусственных магнитных навигационных ориентиров для определения места подвижных объектов с применением магнитометрических систем. Однако использование постоянных магнитов для создания магнитных аномалий предпочтительнее, так как величина индуцированного магнитного поля от объекта из магнитомягких материалов являемся функцией МПЗ, подверженного изменению во времени и анизотропии формы источника магнитной аномалии, которая может быть нарушена при размещении ориентира.
- вектор расстояния от диполя до рассматриваемой точки пространства. Данное свойство позволяет применять их в качестве искусственных магнитных навигационных ориентиров для определения места подвижных объектов с применением магнитометрических систем. Однако использование постоянных магнитов для создания магнитных аномалий предпочтительнее, так как величина индуцированного магнитного поля от объекта из магнитомягких материалов являемся функцией МПЗ, подверженного изменению во времени и анизотропии формы источника магнитной аномалии, которая может быть нарушена при размещении ориентира.
Известен способ обнаружения подводных ферромагнитных объектов (патент RU №2297650 С2, 20.04.2007 [1]). Сущность данного способа состоит в том, что буксируют два источника магнитного поля вдоль полосы обследования. Причем границы полосы обследования задают путем рассеивания ферромагнитного материла, сформированного в виде масс в 1 м2, размещенных на расстоянии 80-170 м друг от друга вдоль оси границы с образованием четырехугольника. Осуществляют посредством блока управления попеременной работы буксируемых источников магнитного ноля регистрацию суммарного магнитного поля буксируемых источников и ферромагнитных масс первичным трехкомпонентным преобразователем магнитного поля. Усиливают и преобразуют зарегистрированные сигналы суммарного магнитною поля буксируемых источников и ферромагнитных масс вторичным преобразователем. Передают усиленные и преобразованные сигналы суммарного магнитного поля буксируемых источников и ферромагнитных масс в вычислительный блок. В вычислительном блоке определяется сигнал, обусловленный наличием ферромагнитных масс или подводного ферромагнитного объекта. Передают сигнал с вычислительного блока на исполнительный блок с последующей его ретрансляцией в блок управления. Блок у правления обеспечивает движение буксируемых источников магнитного поля в заданных границах полосы обследования путем определении координат сигнала в навигационном модуле. Технический результат: расширение полосы обследования.
Недостатком известного способа [1] является то, что дальность действия магнитометра не является постоянной и определяется магнитными характеристиками объекта, помеховой обстановкой и чувствительностью.
К недостаткам магнитометрического обследования также относится невозможность точного определения местоположения объекта, а также значительная зависимость от вариаций магнитного ноля Земли.
Однако в некоторых случаях существенным преимуществом магнитометра, например, в сравнении с акустическими средствами является его эффективность в условиях реверберационных помех мелкого моря.
Известны также способ и устройство для создания магнитного поля, локализованного в нанометровой области пространства (патент RU №2447527 С1, 10.04.2012 [2]) при этом локализованное магнитное поле формируют в пространстве над зазором между открытыми торцами, лежащими в одной плоскости, двух параллельных ферромагнитных слоев, разделенных слоем, обеспечивающим антиферромагнитную связь между ферромагнитными слоями. Размеры локализации задают толщиной раздельного слоя между ферромагнитными слоями, которые выполняют из магнитомягких материалов с толщинами слоев h1 и h2, удовлетворяющих соотношению M1h1=M2H2, где M1 и M2 - намагниченности насыщения соответствующих ферромагнитных слоев, а направление поля над зазором задают разностью суммарных магнитных моментов ферромагнитных слоев.
Данное техническое решение может быть использовано для головок записи на магнитные носители с высокой плотностью информации и устройств для переключения снинтропных нанокомпонентов в электронике, повышения пространственного разрешения, чувствительности и функциональных возможностей магнитных сенсорных устройств, в частности магнитных силовых микроскопов, создание новых типов биочипов для биохимической диагностики среды на основе манипуляторов магнитными нанометками, сепарации биологических нанообъектов и химических веществ по их магнитным свойствам в микро- и нанообъемах, но для применения его в морских условиях практически не возможно.
Известны также способ обнаружения подводных ферромагнитных объектов и система для обнаружения подводных ферромагнитных объектов (патент RU №2615050 С2, 03.04.2017 [3]), которые от носятся к разведке с использованием магнитных полей и могут быть использованы для обнаружения подводных ферромагнитных объектов. Сущность: буксиру ют два источника магнитного ноля вдоль полосы обследования. Причем границы полосы обследования задают путем рассеивания ферромагнитного материла, сформированного в виде масс в 1 m3, размещенных на расстоянии 80-170 м друг от друга вдоль оси границы с образованием четырехугольника. Осуществляют посредством блока управления попеременной работы буксируемых источников магнитного поля регистрацию суммарного магнитного поля буксируемых источников и ферромагнитных масс первичным трехкомпонентным преобразователем магнитного поля. Усиливают и преобразуют зарегистрированные сигналы суммарного магнитного поля буксируемых источников и ферромагнитных масс вторичным преобразователем. Передают усиленные и преобразованные сигналы суммарного магнитного поля буксируемых источников и ферромагнитных масс в вычислительный блок. В вычислительном блоке определяется слипал, обусловленный наличием ферромагнитных масс или подводного ферромагнитного объекта. Передают сигнал с вычислительною блока на исполнительный блок с последующей его ретрансляцией в блок управления. Блок управления обеспечивает движение буксируемых источников магнитного поля в заданных границах полосы обследования путем определения координат сигнала в навигационном модуле. Предварительно выполняют батиметрическую съемку, посредством многолучевого эхолота, акустическое зондирование рельефа дна гидролокатором бокового обзора, по эхо и теневым контактам выявляют обнаруженные подводные объекты, выполняют картирование рельефа дна с выявлением линий водораздела и водосливных линий, дополнительно выполняют зондирование обнаруженного объекта, посредством лазерно-лучевого источника с передачей изображения на видеосистему с выделением границ на изображении посредством оператора Собела и детектора Канне. Система для обнаружения подводных ферромагнитных объектов состоит из измерительной системы магнитного поля, которая включает два буксируемых источника магнитного поля, подключенных посредством кабель-тросов соответственно к блоку питания через блок управления, два буксируемых первичных трехкомпонентных преобразователя магнитного поля, подключенных посредством кабель-тросов соответственно ко вторичному преобразователю через блок управления, вычислительный блок, вход которого подключен к выходу вторичного преобразователя, а выход подключен к входу исполнительною блока, многолучевого эхолота и гидролокатора боковою обзора, которые подключены через блок управления и вторичный преобразователь к вычислительному блоку, отличающаяся тем, что введены лазерно-лучевой модуль, видеосистема, блок обработки изображений, который через блок управления соединен с лазерно-лучевым модулем, многолучевым эхолотом, гидролокатором бокового обзора и вычислителем. Технический результат: повышение достоверности обнаружения подводных объектов.
Основным недостатком известного технического решения является то, что при создании искусственного навигационного ориентира на морском дне выполняют рассеивание ферромагнитного материала, сформированного в виде масс в 1 м3, с последующим его размещением на расстоянии 80-170 м друг от друга вдоль оси границы с образованием четырехугольника. Решение данной задачи во многом зависит от точности позиционирования как самою объекта с которого осуществляют установку ферромагнитного материала, так и ферромагнитных масс после их установки на морское дно. Создание подводного морского полигона, отвечающего требованиям по созданию подводною полигона существенно увеличивает время технологическою процесса, а соответственно и материальные затраты.
Известен также излучающий кабель плавкого типа, который содержит по меньшей мере один излучающий коаксиальный кабель и по меньшей мере один волновод с утечкой, при этом излучающий коаксиальный кабель и волновод с утечкой образуют интегрированную конструкцию, и излучающий коаксиальный кабель и волновод с утечкой расположены на расстоянии 0-20 мм друг от друга; при этом излучающий кабель дополнительно содержит внешнюю оболочку и наполнительный слой, и при этом внешняя оболочка обернута вокруг излучающего коаксиального кабеля и волновода с утечкой, и по меньшей мере одно заднее ребро для указания положения выступает из внешней боковой стенки внешней оболочки, и наполнительный слой предусмотрен между внешней оболочкой и излучающим коаксиальным кабелем и между внешней оболочкой и волноводом с утечкой (патент RU №2797865 С2, 09.06.2023[4]), что обеспечивает возможность передачи сигналов в более широкой полосе. Однако ввиду того, что волноводный проводник и внешний проводник снабжены периодическими излучающими канавками вдоль их соответствующих осевых направлений, и при этом в излучающих канавках используется одно или более эллиптических отверстий, прямоугольных отверстий, наклонных отверстий в виде «/ \», делительных отверстий, L-образных отверстий, U-образных отверстий, Е-образных отверстий, Т-образных отверстии, треугольных отверстий и многоугольных отверстий, и как излучающие канавки во внешнем проводнике, так и излучающие канавки в волноводном проводнике расположены в направлении в сторону от заднего ребра, то данное устройство представляет собой сложную конструкцию и его изготовление сопряжено с существенными трудовыми и материальными затратами.
Известна арктическая подводная навигационная система, предназначенная для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания (патент RU №2596244 С1, 10.09.2016 [5]), которая включает в себя проложенный по дну ведущий кабель, береговой генератор тока, судовую аппаратуру установленные вдоль трассы кабеля два и более гидроакустических маяка с различающимися частотами излучения импульсных сигналов, синхронизированных по тому же кабелю.
Для повышения точности навигационного обеспечения объектов навигации навигационную систему дополнительно комплектуют наземным комплексом с генератором тока крайне низких частот с возможностью генерирования и излучения электромагнитных импульсных сигналов по ведущему кабелю и генератором синхроимпульсов с возможностью синхронно или с «кодированной» задержкой времени излучать импульсные сигналы различающихся частот гидроакустическими маяками. При этом судовая аппаратура объектов навигации должна определять свое мест омоложение дальномерным методом но измеренным значениям времени прохождения сигнала от каждого датчика и гиперболическим методом от пары датчиков независимо от измеренной разности времени прохождения сигнала.
Для уменьшения демаскировании подводных объектов навигации при получении ими навигационной информации в навигационную систему дополнительно устанавливают ответвление от ведущего кабеля с гидроакустическим маяком-ответчиком с управляемой, адаптируемой дальностью действия двухсторонней звукоподводной связи, автономным источником питании и устройством его подзарядки по кабелю.
Для повышения надежности односторонней связи с подводным объектом навигации и устойчивости ею вождения по трассе ведущего кабеля судовой аппаратурой в навигационной системе возбуждают второе электромагнитное поле более высокой частоты, соразмерной необходимому уровню информационной емкости и надежности связи, и создают электромагнитный коридор судовождения по ведущему кабелю крайне низких частот.
При использовании навигационной системы на акваториях, отягощенных ледовой обстановкой, в ее состав дополнительно включают установленный по трассе ведущего кабеля эхоледомер с электронно-управляемой формой характеристики направленности, выполненный с возможностью определения наличия льда, измерения его толщины и размеров разводов в ледовом покрове, а также обнаружения несанкционированных надводных и подводных объектов и передачи информации по тому же кабелю на пункты управления проводкой судов.
Для использования навигационной системы на участках малых глубин в период сезонных и приливно-отливных изменений в ее состав дополнительно включают датчик гидростатического давления, встроенный ведущий кабель и служащий для передачи по тому же кабелю на наземный комплекс текущего значения глубины.
Известная арктическая подводная навигационная система [5] предназначена для обеспечения безопасною плавания судов и других плавсредств Северным морским путем и их проводки на наиболее сложных и ответственных участках.
Способ оборудования морских районов арктической подводной навигационной системой включает применение судна-укладчика ведущего кабеля, а в районах, отягощенных ледовой обстановкой, дополнительное привлечение ледокола. Такой способ навигационного оборудования морскою района, принятый за прототип изобретения, имеет свои недостатки.
Применение судна для укладки ведущею кабеля и ледокола, демаскирует оборудуемый район, так как используемые суда легко обнаруживаются береговыми, морскими, воздушными и космическими средствами наблюдения заинтересованных государств. В результате факт оборудования района арктической подводной навигационной системой становится общеизвестным и служит причиной для привлечения к нему дополнительного внимания. Таким образом, отсутствие скрытности оборудования района арктической подводной навигационной системой составляет главный недостаток существующего способа.
При этом технический результат, достигаемый при реализации известной системы навигации, состоит в повышении точности на безопасности судовождения на СМП при необходимом навигационном обеспечении, связи и управлении ледокольной и лоцманской проводкой судов и отдельных объектов навигации на наиболее сложных и ответственных его участках, например проливах и других опасных в навигационном отношении акваториях, кроме того, высокая точность судовождения относительно вертикальной плоскости ведущею кабеля, по меньшей мере, частично позволит с повышением интенсивности плавания в припайных ледовых полях сохранять коридор судоходным, не требующим ледокольного сопровождения.
Указанный недостаток может быть устранен, если для оборудования морского района подводной навигационной системой использовать в качестве укладчика ведущего кабеля плавсредство, обладающее необходимой скрытностью, то есть подводное.
Такое техническое решение известно из патента RU №2773538 С1, 06.06.2022 [6]), которое представляет собой группу изобретений и которое включает:
1. Способ установки навигационного оборудования морского района в арктической подводной навигационной системе для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания, при котором укладывают на дно вдоль трассы проводки плавсредств подводную навигационную систему с ведущим кабелем и создают электромагнитный коридор судовождения, укладку ведущего кабеля и его оборудования производят самоходным подводным аппаратом, который доставляют в заданный район на надводном, подводном или воздушном носителе, производят его предстартовую подготовку, устанавливают в бортовую систему управления подводного аппарата маршрутное задание и но готовности выпускают в воду, при подходе подводного аппарата к точке начала постановки ведущего кабеля уточняют с помощью географические координаты подводного аппарата направляют его в точку начала постановки ведущего кабеля, в этой точке отдают якорь-заземлитель с подсоединенным к нему ведущим кабелем и гидроакустическим датчиком, служащим для дистанционного включения и выключения системы ведущею кабеля по сигналу от объекта навигации, вытравливают ведущий кабель с вьюшки и укладывают его на грунт, в конечной точке завершают укладку ведущего кабеля, отдают якорь-заземлитель ведущего кабеля с подсоединенным к нему гидроакустическим датчиком, отделяемый блок с источником тока, генератором и аппаратурой для приема и излучения гидроакустических сигналов, в вариантном исполнении в концевых точках ведущего кабеля дополнительно вместе с якорем-заземлителем устанавливают гидроакустический маяк-ответчик или гидроакустический отметчик, после укладки ведущего кабеля и сопутствующею оборудования подводный аппарат направляют к носителю для подъема на борт и возвращения на базу, или укладывают на грунт в конечной точке без отделения блока с источником тока, генератором и аппаратурой для приема излучения гидроакустических сигналов, ведущий кабель располагают по морскому дну параллельно меридиана между двумя реперными точками с известными координатами, которые устанавливают по результатам батиметрических съемок с учетом рельефа морского дна и морских глубин, при этом в реперных точках предварительно устанавливают ориентир, выполненный из железобетона в виде усеченного конуса, снабженного ложбиной, ориентированной параллельно меридиана, и отражателями, размещенными на передней н задней поверхностях ориентира.
2. Самоходный подводный аппарат, имеющий бортовую систему управления, энергосиловую установку с источником энергии и двигателем, движитель, приводы рулевых машинок, стабилизаторы и рули, обеспечивающие движение подводного аппарата по заданному маршруту, навигационное оборудование, обеспечивающее работу подводного аппарата, со спутниковой, радио- или гидроакустической системой навигации, средства радио- и звукоподводной связи с пунктом управления, носителем и объектами навигации, отсек для полезной нагрузки, в отсеке для полезной нагрузки размещается оборудование подводной навигационной системы с ведущим кабелем, включающее устройство постановки ведущего кабеля с вьюшкой, ведущим кабелем, двумя гидроакустическими датчиками, двумя якорями с заземлителями, отделяемый или неотделяемый от подводного аппарата блок с источником тока, его преобразователем, генератором и аппаратурой приема излучения гидроакустических сигналов, включающей электронный блок с усилителем, шифратором и дешифратором, обеспечивающий создание электромагнитного коридора судовождения вдоль ведущего кабеля и связь подводного аппарата и выставленной им системы ведущего кабеля с носителем, пунктом управления и объектами навигации, дополнительно к якорю-заземлителителю могут крепиться гидроакустический маяк-ответчик или гидроакустический отметчик для обеспечения объектов навигации координатами и обозначения концов ведущего кабеля, при этом самоходный подводный аппарат дополнительно содержит светильники, обзорную и стационарную видеокамеры, датчики глубины и температуры, компенсаторы давления, блок плавучести, установленный в верхней части подводного аппарата, на выходе отсека полезной нагрузки дополнительно установлена видеокамера так, что ее ось визирования постоянно направлена в центр вытравляемого ведущего кабеля, обзорная видеокамера установлена посредством кронштейна над блоком плавучести в диаметральной плоскости подводного аппарата в его кормовой части, самоходный подводный аппарат дополнительно снабжен лазерными указателями, системой изменения плавучести, гидроакустическим маяком-ответчиком, мини-гидролокатором кругового обзора, инерционным измерительным устройством, обзорная видеокамера установлена на устройстве, обеспечивающем наклон и поворот камеры в диапазоне ±30 градусов и выполнена с десятикратным приближением изображения, светильники выполнены на светодиодах с мощностью светового потока не менее 2000 люмен с возможностью изменения цветовой температуры и плавной регулировки яркости свечения для уменьшении эффекта засветки от взвешенных в воде частиц, при этом блоки плавучести выполнены из композита на основе полых стеклянных микросфер (синтактика), инерционное измерительное устройство выполнено с мощным микроконтроллером, имеющим встроенную программу предварительной обработки данных, устройство постановки ведущего кабеля состоит из системы автоматической укладки ведущею кабеля представляет собой барабан для хранения кабеля, вращение барабана осуществляется с помощью бесколлекторного редуцированного электродвигателя в масло заполненном компенсированном корпусе, передача управляющего сигнала и питающего напряжения на ведущий кабель осуществляется с помощью установленного внутри барабана оптоэлектрического вращающегося коммутационного устройства, система автоматической укладки ведущего кабеля также состоит из винтового приводного вала, у кладчика, натяжителя кабеля и системы аварийной отдачи ведущего кабеля, система захвата и удержания ведущею кабеля, лебедки, укладчик представляет собой гайку винтовой передачи, перемещение которой согласовано с вращением барабана, натяжитель представляет собой систему подпружиненных роликов, позволяющих обеспечить необходимое натяжение кабеля, лебедка для укладки ведущего кабеля имеет как режим ручного управления, так и режим автоматического управления, система аварийной отдачи ведущего кабеля выполнена гильотинного типа, лебедка выполнена из конструкционных пластиков и сплавов алюминия, система захвата и удержания ведущего кабеля представляет собой створкустиловой рамы, которая приводится в действие редуцированным сервоприводом, самоходный подводный аппарат также оснащен одностепенным манипулятором с тросорезом, состоящим из тросореза, компенсированного маслонаполненного корпуса, бесколлекторного электродвигателя.
3. Арктическую подводную навигационную систему для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания, содержащую проложенный по дну ведущий кабель, посредством подводного аппарата, береговой генератор тока и судовую аппаратуру, в которой ведущий кабель проложен по дну вдоль меридиана между двумя реперными точками с известными координатами, которые устанавливают по результатам батиметрических съемок с учетом рельефа морского дна и морских глубин, при этом в реперных точках предварительно устанавливают ориентир, выполненный из железобетона в виде усеченного конуса, снабженного ложбиной, ориентированной параллельно меридиана, и отражателями, размещенными на передней и задней поверхностях ориентира, судовая аппаратура содержит инерциальную навигационную систему, и/или гидроакустический лаг, вычислительный блок, который своими входами соединен с выходами инерциальной навигационной системы и/или гидроакустического лага, ведущий кабель проложен по дну параллельно меридиана.
Такое построение системы арктической подводной навигационной системы для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания позволяет повысить точность определения местонахождения плавательного средства по сравнению с аналогами.
Однако для решения некоторых специальных задач, например, с использованием без экипажных плательных средств или подводных роботов в бассейне арктических морей достигаемая точность определения местонахождения таких плавательных средств не отвечает современным требованиям, предъявляемым к таким системам.
Задачей предлагаемого технического решения является повышение точности определения местонахождения плавательного средства в бассейне арктических морей при решении специальных задач.
Поставленная задача решается за счет того, что в арктической подводной навигационной системе для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания, содержащей проложенный по дну ведущий кабель, посредством подводного аппарата, береговой генератор тока и судовую аппаратуру, при этом ведущий кабель проложен по дну вдоль меридиана между двумя реперными точками с известными координатами, которые устанавливают по результатам батиметрических съемок с учетом рельефа морского дна и морских глубин, при этом в реперных точках предварительно устанавливают ориентир, выполненный из железобетона в виде усеченного конуса, снабженного ложбиной, ориентированной параллельно меридиана, и отражателями, размещенными на передней и задней поверхностях ориентира, судовая аппаратура содержит инерциальную навигационную систему, и/или гидроакустический лаг, вычислительный блок, который своими входами соединен с выходами инерциальной навигационной системы и/или гидроакустического лага, ведущий кабель проложен по дну параллельно меридиана, в отличие от прототипа [6], ведущий кабель выполнен из дискретных магнитных диполей из магнитотвердого материала типа викаллоя, измеритель магнитного поля выполнен с порогом чувствительности Bmin=0,7×10-9 Тл в диапазоне частот 0,1-1,0 Гц с рабочим диапазоном полей 20000-110000 нТл.
Сущность заявляемого изобретения заключается в создании искусственного навигационного ориентира из магнитотвердого материала.
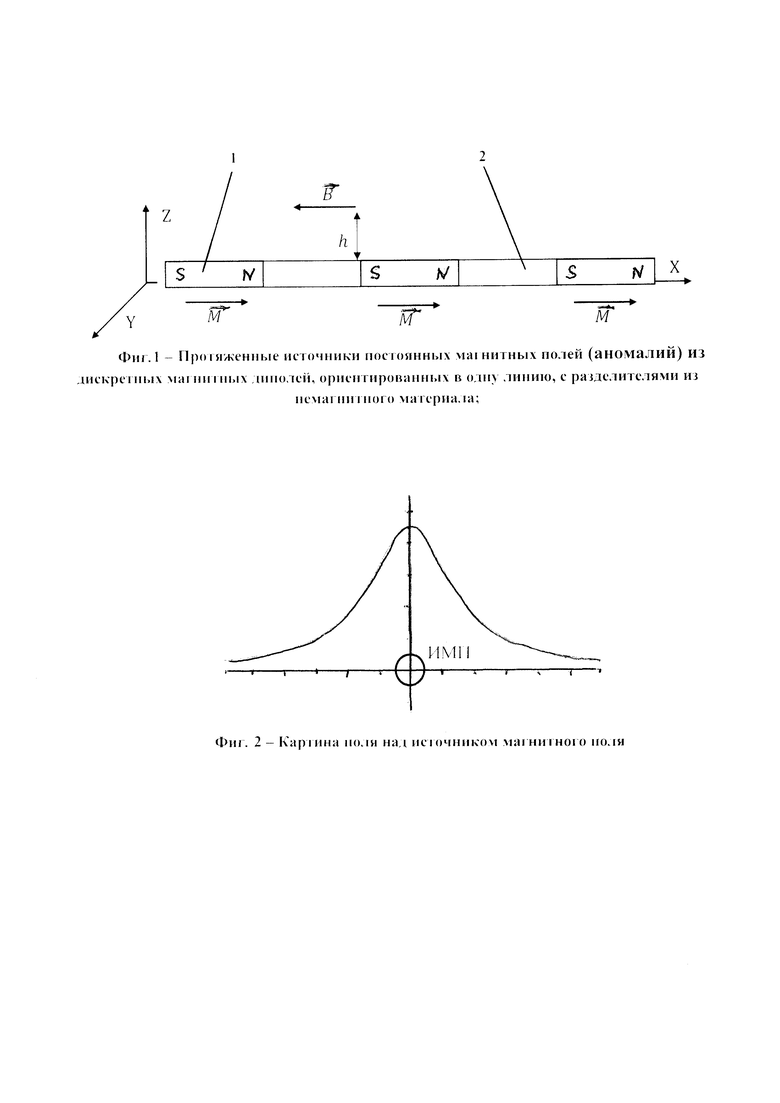
Сущность предлагаемого изобретения поясняется чертежами, где на фиг. 1, 2 показан вариант создания протяженного источника постоянного магнитного поля на основе постоянных магнитов из магнитотвердого материала.
Фиг. 1. Конструкция ведущего кабеля. Ведущий кабель состоит из дискретных магнитных диполей 1 и разделителей 2.
Фиг. 2. Картина поля над источником магнитного поля.
Важным вопросом создания источника навигационного магнитного поля является выбор магнитотвердого материала, который наряду с наличием определенных магнитных свойств должен отвечать определенным требования к механическим свойствам, в частности к деформируемости. В качестве материалов, удовлетворяющих данным требованиям, можно назвать сплавы Fe-Co-V (викаллой) с намагниченностью Is≈1 Тл и остаточной индукцией Br≈0,9 Тл, Ее-Cr-Со с индукцией Br≈1,4 Тл и Nd-Fe- В (неодимовые магниты) с намагниченностью Is≈1,6 Тл и остаточной индукцией Br≈1,4 Тл. Преимуществом викаллоя являются его механические свойства, в том числе возможность его изготовления в виде проволоки диаметром 2-8 мм. Для неодимовых магнитов главным преимуществом являются высокие магнитные свойства и практически отсутствующая их деградация на интервалах времени в десять и более лет. Основной недостаток неодима сильная подверженность сплава разрушению от коррозии, что требует принятия дополнительных мер для размещения таких источников магнитного поля в морской воде.
В предлагаемом техническом решении ведущий кабель выполнен из викаллоя (сплав кобальта 52%, ванадия 10% и железа 37%, остальное следовые элементы (углерод, марганец) - см., например: vicalloy Википедия и academic.ru.
Максимальное значение градиента при движении подвижного объекта над ведущем кабеле при h=5 м составит  Учитывая, что типичное значение градиента магнитного поля Земли составляет величину порядка
Учитывая, что типичное значение градиента магнитного поля Земли составляет величину порядка  полученная величина возмущения, может однозначно трактоваться как искусственная аномалия. Основываясь на полученных результатах, можно сформулировать приблизительные требования к датчикам детектора магнитных аномалий, выполненного по принципу градиентометра. Так для h=5-10 м и скорости движения подвижного объекта V=1,54-5,14 м/с порог чувствительности должен составлять Bmin=0,7 × 10-9 Тл в диапазоне частот 0,1-1,0 Гц.
полученная величина возмущения, может однозначно трактоваться как искусственная аномалия. Основываясь на полученных результатах, можно сформулировать приблизительные требования к датчикам детектора магнитных аномалий, выполненного по принципу градиентометра. Так для h=5-10 м и скорости движения подвижного объекта V=1,54-5,14 м/с порог чувствительности должен составлять Bmin=0,7 × 10-9 Тл в диапазоне частот 0,1-1,0 Гц.
Полученные данные позволяют судить о реализуемости и целесообразности применения источников магнитного поля для создания систем локальной навигации для различных подвижных объектов и робототехнических комплексов обеспечения навигации подводных аппаратов различных классов в условиях слабой расчленённости МПЗ или его слабой изученности в районе выполнения поставленных задач.
При создании ориентира можно использовать ведущий кабель как прямоугольного, так и круглого или овального сечения.
Установка навигационного оборудования морского полигона в арктической подводной навигационной системе, как и в прототипе [6], заключается в том, что укладывают на дно подводную навигационную систему с ведущим кабелем и создают электромагнитный коридор судовождения.
При этом самоходный подводный аппарат содержит бортовую систему управления, навигационное оборудование, средства радио- и звукоподводной связи, оборудование подводной навигационной системы с ведущим кабелем, светильники, обзорную и стационарную видеокамеры, датчики глубины и температуры, компенсаторы давления, блок плавучести, лазерные указатели, систему изменения плавучести, гидроакустический маяк-ответчик, мини гидролокатор кругового обзора, инерционное измерительное устройство, одностепенный манипулятор с тросорезом.
При этом арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации, в стесненных условиях плавания содержит проложенный по дну ведущий кабель, посредством подводного аппарата, береговой генератор тока и судовую аппаратуру, при этом ведущий кабель проложен по дну вдоль меридиана между двумя реперными точками с известными координатами, которые устанавливают по результатам батиметрических съемок с учетом рельефа морского дна и морских глубин, при этом в реперных точках предварительно устанавливают ориентир, выполненный из железобетона в виде усеченного конуса, снабженного ложбиной, ориентированной параллельно меридиана, и отражателями, размещенными на передней и задней поверхностях ориентира, судовая аппаратура содержит инерциальную навигационную систему, и/или гидроакустический лаг, вычислительный блок, который своими входами соединен с выходами инерциальной навигационной системы и/или гидроакустического лага, ведущий кабель проложен по дну параллельно меридиана.
В отличие от прототипа [6], ведущий кабель выполнен из магнитотвердого материала типа викаллой, измеритель магнитного поля выполнен с порогом чувствительности Bmin=0,7×10-9 Тл в диапазоне частот 0,1-1,0 Гц.
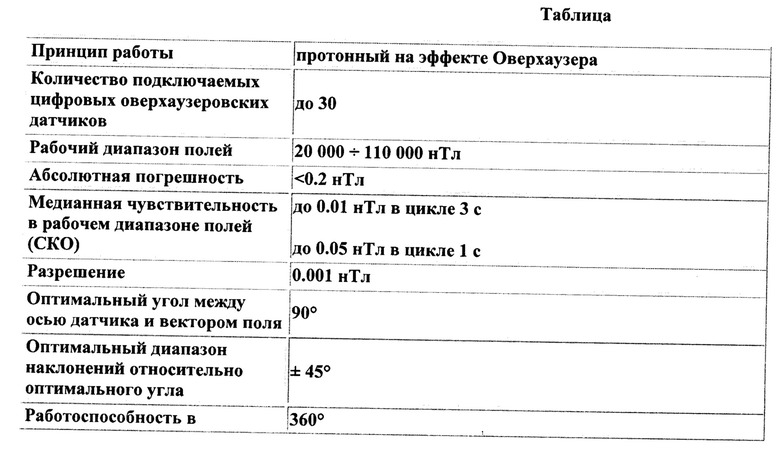
В качестве измерителя магнитного поля может быть применены градиентометр напряженности магнитного поля, который содержит возбуждаемые этим полем два преобразователя, размещенные на базовом между собой расстоянии и вдоль магнитного поля, выходные цепи которых подключены к блоку обработки сигналов, при этом упомянутые преобразователи выполнены в виде параллельно ориентированных полупроводниковых стержневых элементов с двумя торцевыми токовыми контактами каждый, присоединенными к источнику напряжения постоянного тока, и с расположенными на их боковых поверхностях потенциальными электродами, подключенными к блоку обработки сигнала в виде последовательно соединенных блоков вычитания частот и регистрации, который может быть использован для измерений параметров неравномерных магнитных полей (аналог такого измерителя приведен в патенте RU №26428820, 29.01.2018) или протонный магнитометр - градиентометр на эффекте Оверхаузера модели MaxiMage характеристиками, приведенными в таблице (office @ geodevice.ru).
При этом навигационное оборудование морского района подводной навигационной системой с ведущим кабелем с применением самоходного аппарата и их функционирование осуществляются, как и в прототипе [6], следующим образом.
Посредством аппаратуры АПА (мини гидролокатора или эхолота) с учетом имеющегося архива съемок рельефа дна в заданном районе выбирают точки рельефа морского дна между которыми будет проложен ведущий кабель. В выбранных точках посредством одностепенного манипулятора АПА устанавливают в реперных точках ориентир, выполненный из железобетона в виде усеченного конуса, снабженного ложбиной, ориентированной вдоль меридиана, и отражателями, размещенными на передней и задней поверхностях ориентира. Далее посредством системы автоматической укладки ведущего кабеля укладывают ведущий кабель в ложбину первого ориентира. При этом, посредством якоря-заземлителя ведущий кабель фиксируется за корпус первого ориентира. Такая операция повторяется и при достижении второго ориентира. Весь процесс укладки ведущего кабеля между двумя ориентирами контролируется видеокамерами и лазерными указателями.
Как и в прототипе [6] на акваториях, отягощенных ледовой обстановкой, навигационная система может дополнительно содержать установленный по трассе ведущего кабеля датчик эхоледомера с электронно-управляемой формой характеристики направленности, выполненный с возможностью определения наличия льда, измерения его толщины и размеров разводов в ледовом покрове, а также обнаружения несанкционированных надводных и подводных объектов и передачи информации по тому же кабелю на пункты управления проводкой судов. Навигационная система может также содержать встроенный в ведущий кабель датчик гидростатического давления, выполненный с возможностью измерения (на участках малых глубин в период сезонных и приливно-отливных изменений) и передачи текущего значения глубины по тому же кабелю на наземный комплекс.
Маневрирование подводного объекта в зоне ведущего кабеля осуществляется также, как и в прототипе [6].
Техническим результатом изобретения является повышение точности вождения подводного объекта с применением навигационных систем, основанных на использовании магнитного поля Земли в районах с постоянным или равномерно изменяющимся полем и при отсутствии естественных магнитных аномалий. Технический результат достигается за счет создания с помощью ведущего кабеля, выполненного из викаллоя, размещенного в точно известных координатах в районе действий подвижного объекта искусственной магнитной аномалии, пригодной для определения с использованием магнитометрической системы географических координат объекта
При использовании ведущего кабеля выполненного из викалоя и протонного градиентометра на эффекте Оверхаузера точность вождения подводного объекта может быть повышена в 2-3 раза по сравнению с аналогами и прототипом.
Кроме того выполнение ведущего кабеля из викаллоя позволяет существенно уменьшить его массогабаритные характеристики.
Предлагаемое техническое решение может быть также использовано на железных дорогах, в туннелях, шахтах, зданиях и других средах с плохим покрытием беспроводного сигнала.
Источники информации
1. Патент RU №2297650С2, 20.04.2007.
2. Патент RU №24475270,10.04.2010.
3. Патент RU №26150500, 03.04.2017.
4. Патент RU №2797865С2, 09.06.2023.
5. Патент RU №25962440,10.09.2016
6. Патент RU №27735380, 06.06.2022.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| АРКТИЧЕСКАЯ ПОДВОДНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ВОЖДЕНИЯ И НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ НАДВОДНЫХ И ПОДВОДНЫХ ОБЪЕКТОВ НАВИГАЦИИ В СТЕСНЕННЫХ УСЛОВИЯХ ПЛАВАНИЯ | 2015 |
|
RU2596244C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА И САМОХОДНЫЙ ПОДВОДНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2710791C1 |
| Арктическая система вождения и навигационного обеспечения наземного транспорта | 2017 |
|
RU2652167C1 |
| Подводный робототехнический комплекс | 2015 |
|
RU2609618C1 |
| СПОСОБ ПРОКЛАДКИ МОРСКИХ ПОДВОДНЫХ КАБЕЛЕЙ | 2010 |
|
RU2444827C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2014 |
|
RU2563074C1 |
| СПОСОБ НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2013 |
|
RU2563332C2 |
| ПОДВОДНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2010 |
|
RU2446983C2 |
Изобретение относится к области морской техники и предназначено для навигационного оборудования морских районов и обеспечения безопасности кораблевождения и определения в море своих координат плавсредствами (надводными кораблями и судами, подводными лодками и аппаратами, а также подводными роботами). В арктической подводной навигационной системе для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания, содержащей проложенный по дну ведущий кабель, посредством подводного аппарата, береговой генератор тока и судовую аппаратуру, при этом ведущий кабель проложен по дну вдоль меридиана между двумя реперными точками с известными координатами, которые устанавливают по результатам батиметрических съемок с учетом рельефа морского дна и морских глубин, при этом в реперных точках предварительно устанавливают ориентир, выполненный из железобетона в виде усеченного конуса, снабженного ложбиной, ориентированной параллельно меридиана, и отражателями, размещенными на передней и задней поверхностях ориентира, судовая аппаратура содержит инерциальную навигационную систему и/или гидроакустический лаг, вычислительный блок, который своими входами соединен с выходами инерциальной навигационной системы и/или гидроакустического лага, ведущий кабель проложен по дну параллельно меридиана, в отличие от аналогов и прототипа ведущий кабель выполнен из магнитотвердого материала типа викаллоя, измеритель магнитного поля выполнен с порогом чувствительности Bmin=0,7×10-9 Тл в диапазоне частот 0,1-1,0 Гц с рабочим диапазоном полей 20000-110000 нТл. Технический результат заключается в повышении точности определения координат подводных подвижных морских аппаратов различного назначения. 2 ил., 1 табл.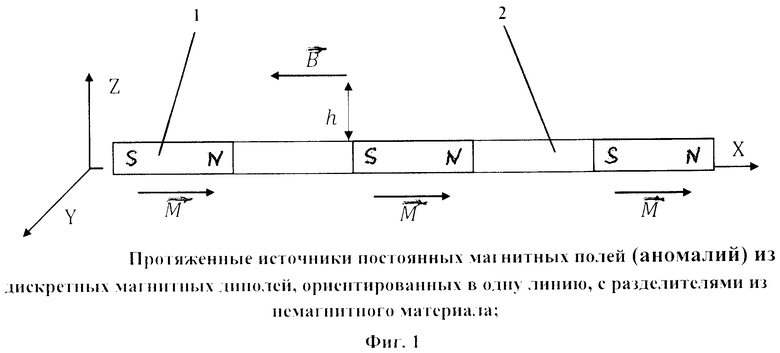
Арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания, содержащая проложенный по дну ведущий кабель, посредством подводного аппарата, береговой генератор тока и судовую аппаратуру, при этом ведущий кабель проложен по дну вдоль меридиана между двумя реперными точками с известными координатами, которые устанавливают по результатам батиметрических съемок с учетом рельефа морского дна и морских глубин, при этом в реперных точках предварительно устанавливают ориентир, выполненный из железобетона в виде усеченного конуса, снабженного ложбиной, ориентированной параллельно меридиана, и отражателями, размещенными на передней и задней поверхностях ориентира, судовая аппаратура содержит инерциальную навигационную систему и/или гидроакустический лаг, вычислительный блок, который своими входами соединен с выходами инерциальной навигационной системы и/или гидроакустического лага, ведущий кабель проложен по дну параллельно меридиана, отличающаяся тем, что ведущий кабель выполнен из дискретных магнитных диполей из магнитотвердого материала типа викаллоя, разделенных между собой разделителями из немагнитного гибкого материала, отдельные диполи расположены таким образом, чтобы векторы их магнитных моментов были направлены в одну сторону, при этом измеритель магнитного поля выполнен с порогом чувствительности Bmin=0,7×10-9 Тл в диапазоне частот 0,1-1,0 Гц и с рабочим диапазоном полей 20000-110000 нТл.
| Способ навигационного оборудования морского района и самоходный подводный аппарат для его осуществления и арктическая подводная навигационная система для вождения и навигационного обеспечения надводных и подводных объектов навигации в стесненных условиях плавания | 2021 |
|
RU2773538C1 |
| Элементарный учебник физики под редакцией академика Г.С | |||
| Ландсберга, государственное издательство технико-теоретической литературы, Москва, 1957 г | |||
| Военно-морской словарь, Министерство обороны СССР, военно-морской флот, Москва, Военное издание, 1990 г | |||
| Способ навигационного оборудования морского района | 2022 |
|
RU2789999C1 |
| СПОСОБ НАВИГАЦИОННОГО ОРИЕНТИРОВАНИЯ ПОДВОДНОГО ПЛАВСРЕДСТВА ПО ТРАССЕ ПОДВОДНОГО КАБЕЛЯ ИЛИ ТРУБОПРОВОДА | 2022 |
|
RU2794526C1 |

