Изобретение относится к судовым средствам магнитной защиты подводного или надводного объекта, в частности к автоматическим регуляторам магнитного поля объекта.
Известны автоматические регуляторы магнитного поля объекта, которые, управляя установленными на нем источниками компенсирующего электромагнитного поля, обеспечивают требуемый уровень результирующего магнитного поля объекта. Примером таких регуляторов могут служить регуляторы: УРТ-860, ДВС-860, РТКП, «Кадмий-Р ».
Известен также автоматический регулятор магнитного поля подводных или надводных объектов КДС («Морская радиоэлектроника», 4 (18), декабрь 2006 г, «Руководство по эксплуатации ИМЯН 421457.702 РЭ, СПб, 2008 г.») - прототип.
Этот регулятор включает в себя блоки приема сигналов от навигационного комплекса, от датчиков магнитного поля Земли или датчиков магнитного поля объекта, блок формирования алгоритма управления системой автоматического управления магнитным полем объекта, блоки управления компенсаторами магнитного поля объекта.
Однако при наладке системы управления магнитным полем объекта, включающей в себя регулятор магнитного поля и управляемые электромагнитные компенсаторы, регулятор КДС требует ручного переключения витков в секциях размагничивающих обмоток и ручную установку необходимого тока в этих секциях. Настройка таких систем производится на магнитных стендах и выполняется на различных курсах установленного на стенде объекта. Необходимость проведения трудоемких и продолжительных ручных операций при наладке систем управления магнитным полем объекта, использующих регулятор КДС, и невозможность их автоматизации являются существенными недостатками этого регулятора.
Подбор необходимого количества витков в секциях обмоток размагничивающего устройства (РУ) при наладке систем управления магнитным полем объекта выполняется путем переключения жил кабеля в этих секциях. Для обеспечения этих переключений предусматривается большое количество контактов в силовых цепях системы РУ, что существенно снижает надежность этих систем.
При использовании управляемых автономных источников питания в секциях обмоток РУ возможно при наладке систем управления сократить количество требуемых переключений и уменьшить количество контактов в силовых цепях системы РУ.
Однако регулятор КДС, не позволяя реализовать автоматизированную регулировку коэффициентов передачи при управлении такими источниками, исключает возможность сокращения переключаемых контактов и за счет этого соответственно повысить надежность систем управления магнитным полем.
Задачей предлагаемого изобретения является обеспечение автоматизации процесса наладки размагничивающей системы с автоматическим регулятором управления магнитным полем объекта и повышение надежности этой системы.
Для этого в автоматический регулятор магнитного поля подводного или надводного объекта, включающий блоки приема сигналов от навигационного комплекса и от установленных на объекте датчиков магнитного поля, блок формирования алгоритма управления системы автоматического управления магнитным полем и блоки управления компенсаторами магнитного поля объекта, введен блок распределения сигналов управления эффективностью компенсаторов магнитного поля объекта, вход которого соединен с выходом блока формирования алгоритма управления, а его выход соединен с входами блоков управления компенсаторами магнитного поля объекта.
Введение блока распределения сигналов позволяет автоматизировать длительный и трудоемкий процесс наладки размагничивающей системы и повысить надежность систем управления магнитным полем объекта.
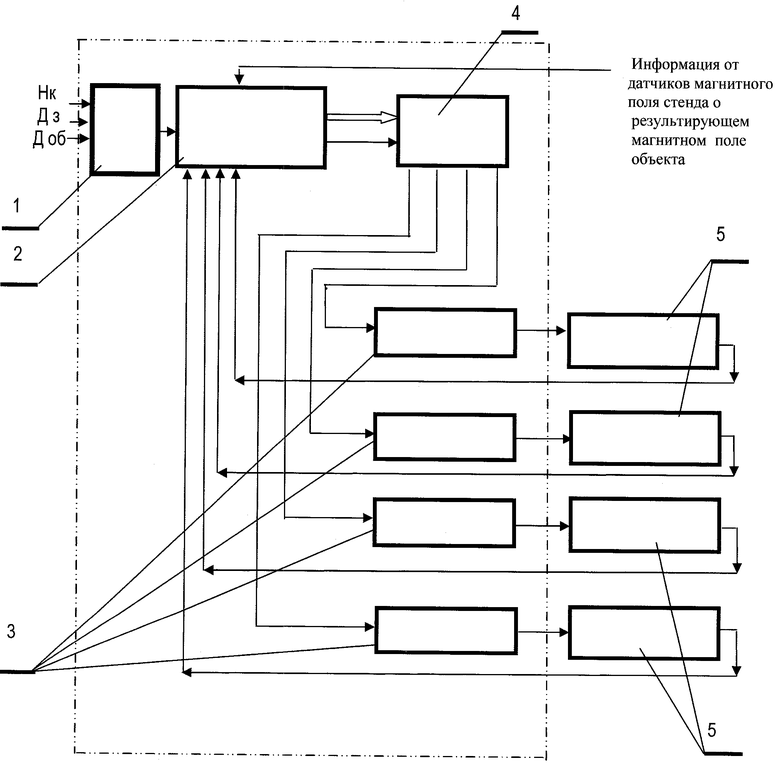
Сущность изобретения поясняется чертежом, на котором представлена блок-схема автоматического регулятора магнитного поля подводного или надводного объекта с компенсаторами его магнитного поля.
Автоматический регулятор магнитного поля подводного или надводного объекта содержит блок приема входных сигналов 1, в который поступают сигналы от датчиков магнитного поля или от навигационного комплекса, установленных на объекте - Нк, Дз, Доб, расположенный за ним блок формирования алгоритма управления 2, вырабатывающий управляющие сигналы для блоков управления электромагнитными компенсаторами 3, которые связаны с последним через установленный между ними блок распределения 4, автоматически корректирующий величину входных сигналов упомянутых блоков управления 3, выходы которых подсоединены к входам электромагнитных компенсаторов 5, не входящих непосредственно в состав предлагаемого автоматического регулятора, а установленных на объекте, и являющихся исполнительным органом в системе регулирования магнитного поля объекта, которые создают компенсирующее электромагнитное поле требуемой величины.
При этом выход блока приема входных сигналов 1 соединен с входом блока формирования алгоритма управления 2, выход которого соединен с входом блока распределения 4, выход которого, в свою очередь, соединен с входами соответствующих блоков управления электромагнитными компенсаторами 3 магнитного поля объекта.
В режиме настройки автоматического регулятора его работа осуществляется следующим образом.
В блок приема входных сигналов 1 поступают сигналы от датчиков магнитного поля или от навигационного комплекса, установленных на объекте (Нк, Дз, Доб). В соответствии с требуемым алгоритмом функционирования, реализуемым в блоке формирования алгоритма управления 2, в этом блоке по заданной программе вырабатываются управляющие сигналы для блоков управления электромагнитными компенсаторами 3. Величины этих сигналов автоматически корректируются блоком распределения 4 по командам из блока формирования алгоритма управления 2 с учетом информации о магнитном состоянии объекта, поступающей в форме сигналов от датчиков, установленных на стенде, и информации о величине токов каждого электромагнитного компенсатора 5, установленного на объекте, например, от управляемых источников тока, питающих секции обмоток РУ. Блоки управления электромагнитными компенсаторами 3, воздействуя на электромагнитные компенсаторы 5, формируют требуемое компенсирующее электромагнитное поле объекта.
Изобретение относится к автоматическим регуляторам магнитного поля объекта. Регулятор содержит блоки приема сигналов от навигационного комплекса и от датчиков магнитного поля Земли, блок формирования алгоритма управления системы автоматического управления магнитным полем объекта, блоки управления компенсаторами магнитного поля объекта, регулируемый блок распределения сигналов управления эффективностью компенсаторов магнитного поля объекта. Вход регулируемого блока распределения сигналов управления эффективностью компенсаторов магнитного поля объекта соединен с выходом блока формирования алгоритма управления, а выход соединен с входами блоков управления компенсаторами магнитного поля объекта. Технический результат заключается в повышении надежности системы. 1 ил.
Автоматический регулятор магнитного поля подводного или надводного объекта, включающий блоки приема сигналов от навигационного комплекса и от датчиков магнитного поля Земли или датчиков магнитного поля объекта, блок формирования алгоритма управления системы автоматического управления магнитным полем объекта, блоки управления компенсаторами магнитного поля объекта, отличающийся тем, что в него введен регулируемый блок распределения сигналов управления эффективностью компенсаторов магнитного поля объекта, вход которого соединен с выходом блока формирования алгоритма управления, а его выход соединен с входами блоков управления компенсаторами магнитного поля объекта.
| СПОСОБ РАЗМАГНИЧИВАНИЯ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1994 |
|
RU2095277C1 |
| JP 10081298 A, 31.03.1998 | |||
| ИСТОЧНИК ПИТАНИЯ ЭЛЕКТРОМАГНИТНЫХ КОМПЕНСАТОРОВ | 2005 |
|
RU2289192C1 |
| СИСТЕМА РАЗМАГНИЧИВАНИЯ ПЛАВУЧЕГО ФЕРРОМАГНИТНОГО ОБЪЕКТА ПРИ БЕРЕГОВОМ И ПЛАВУЧЕМ БАЗИРОВАНИИ | 2000 |
|
RU2185305C2 |

