Способ относится к моделям и имитационному математическому статистическому моделированию и предназначен для исследования точностных характеристик интегрированной системы навигации подвижного состава в ожидаемых условиях эксплуатации, а также для отработки вопросов программно-аппаратной реализации комплексных алгоритмов обработки навигационной информации и оценки возможности их использования в навигационном процессоре.
Известна компьютерная универсальная система обучения и контроля (заявка на изобретение №2007146572/12, опублик. 27.06.2009), содержащая центральный сервер, рабочие места преподавателя и обучаемых, соединенные с сервером через локальную сеть, при этом на сервере хранятся база данных с учебными материалами и результаты электронных тестирований обучаемых, сведения об индивидуальных особенностях выполнения каждым обучаемым тестовых заданий, отличающаяся наличием средств коллективного пользования и моделирования боевой обстановки; при этом управление всей системой и обмен информацией между рабочими местами осуществляется управляющей системой компьютерной универсальной системы обучения и контроля, что позволяет отрабатывать «вводные», моделирующие работу на реальном образце вооружения.
Недостатки этого способа: отсутствует имитационное статистическое моделирование условий распространения радиоволн в виде случайных возмущений, действующих на систему, в то время как системы, синтезируемые на основе классического детерминированного подхода, оказываются неработоспособными при воздействии помех.
Наиболее близким аналогом является «Способ имитационного статистического моделирования радиоэлектронного вооружения надводных кораблей» (патент РФ №2399097, МПК G09B 9/00, опублик. 10.09.2010). Принят за прототип. Используют различные сценарии внешней обстановки, формирующейся вокруг корабля, моделируют функционирование элементов и средств системы радиоэлектронного вооружения надводного корабля, условия функционирования которых имитируются с помощью модели окружающей корабль внешней обстановки, включающей моделирование объектов воздушной, надводной, подводной обстановки, радиочастотных и гидроакустических информационных полей с применением технологий учета полных групп ошибок, допусков и разброса параметров имитируемых объектов и процессов в соответствии с реальными условиями проведения испытаний эффективности и надежности работы системы управления надводного корабля в различных условиях его функционирования. Техническим результатом изобретения является создание системы полунатурного имитационного моделирования испытаний средств радиоэлектронного вооружения надводного корабля, позволяющей на этапе их проектирования провести исследование функционирования этих средств путем имитации их функционирования в моделируемых условиях внешней среды.
Недостатки прототипа: при моделировании не учитывается, что оценка переменных состояния динамического объекта осуществляется с помощью измерительной системы, которая также подвержена воздействию случайных возмущений, приводящих к погрешностям измерений, т.е. не учитываются инструментальные погрешности навигационных измерителей; отсутствуют модели навигационных измерений по данным глобальной спутниковой навигационной системы (ГНСС), которая позволяет определять местоположение динамического объекта с высокой точностью в любой точке околоземного пространства, модели синхронной системы обмена данными вещательного автоматического зависимого наблюдения (АЗН-В) для передачи и приема оперативной информации, также не используется программная реализация алгоритмов комплексной обработки навигационной информации.
Наша задача - разработать способ, обеспечивающий более достоверное имитационное статистическое моделирование локомотивной интегрированной системы навигации (ЛИСН) на основе инерциальных и спутниковых технологий с учетом инструментальных погрешностей навигационных измерителей. Способ предназначен для исследования особенностей функционирования ЛИСН в ожидаемых условиях эксплуатации с учетом динамических свойств локомотива, модели навигационных измерений по данным глобальной спутниковой навигационной системы и системы синхронной системы АЗН-В, кроме того, необходимо учесть, что оценка переменных вектора состояния локомотива осуществляется с помощью измерительной системы, которая также подвержена воздействию случайных возмущений.
Задача решается следующим образом: разработан способ имитационного статистического моделирования локомотивной интегрированной системы навигации, содержащий разработку различных сценариев окружающей внешней обстановки, моделей функционирование элементов и средств локомотивной интегрированной системы навигации, отличающийся тем, что моделируют функционирование навигационных средств и различные условия распространения радиоволн, влияющих на точность определения навигационных параметров локомотивной навигационной аппаратурой, дополнительно разрабатывают имитационный и навигационный модули, которые обмениваются информацией через модуль интерфейса, причем в имитационном модуле используют программно реализованные алгоритмы, объединенные в блоки: моделирования орбитальной группировки (ОГ) глобальной навигационной спутниковой системы (ГНСС); формирования измерений ГНСС; построения траекторий локомотивов; формирования измерений системы вещательного автоматического зависимого наблюдения (АЗН-В); формирования измерений инерциальной навигационной системы (ИНС), передают данные с блока моделирования ОГ ГНСС через блок формирования измерений ГНСС на первый вход блока приема и передачи данных, на второй и третий входы подают данные соответственно с выходов блоков формирования измерений ИНС и формирования измерений АЗН-В, формируют в блоке приема и передачи данных сообщение о моделях параметров траекторного движения локомотива и навигационных измерений ГНСС, ИНС и системы АЗН-В, выдают сформированное сообщение на первый вход модуля интерфейса и преобразуют его в формат данных навигационного модуля, передают сообщение с первого выхода блока интерфейса на блок приема и передачи данных навигационного модуля, после чего передают сообщение в блок экстраполяции навигационных параметров, результаты экстраполяции передают в блок фильтрации навигационных параметров, формируют статистические оценки параметров движения локомотива на имитируемой траектории, передают информацию через блок приема и передачи данных и модуль интерфейса на индикатор, анализируют статистические характеристики функционирования имитируемых навигационных измерителей.
В качестве технологии создания системы имитационного статистического моделирования ЛИСН был выбран стандарт "Архитектура верхнего уровня для создания моделей и проведения имитационного моделирования".
С целью проведения исследований ЛИСН и проверки работоспособности алгоритмов комплексной обработки навигационной информации создают систему имитационного статистического моделирования (СИСМ) с программным обеспечением, имитирующим внешнюю обстановку, складывающуюся вокруг локомотива с функционирующей на нем интегрированной системой навигации, которую моделируют построением траекторий локомотивов и заданием координат неподвижных объектов транспортной инфраструктуры, принимающих участие в формировании условий функционирования реальной ЛИСН, а также программной имитацией внешней помеховой обстановки в соответствии с ожидаемыми условиями эксплуатации.
Систему имитационного статистического моделирования для исследования ЛИСН на основе инерциальных и спутниковых технологий разрабатывают с использованием объектно-ориентированного программирования, и она представляет собой пакет взаимодействующих между собой функциональных программ-блоков. Блочная структура позволила упростить процесс отладки, так как правильность решения задач отдельным блоком легко проверяется.
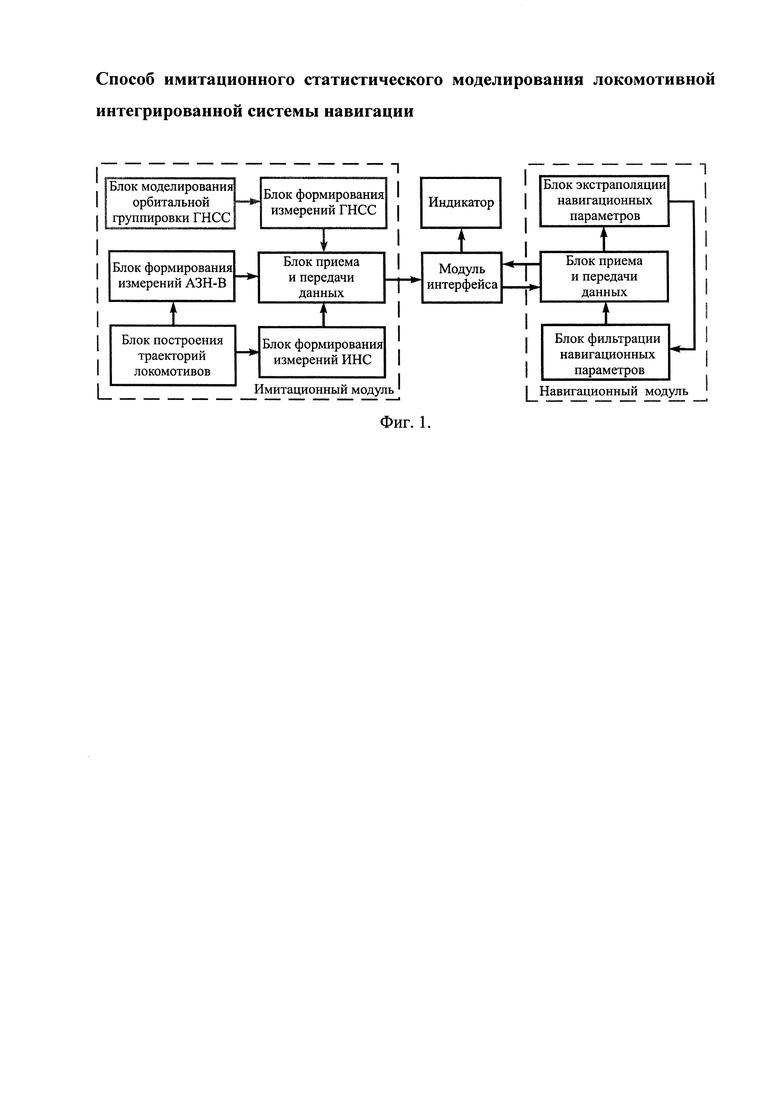
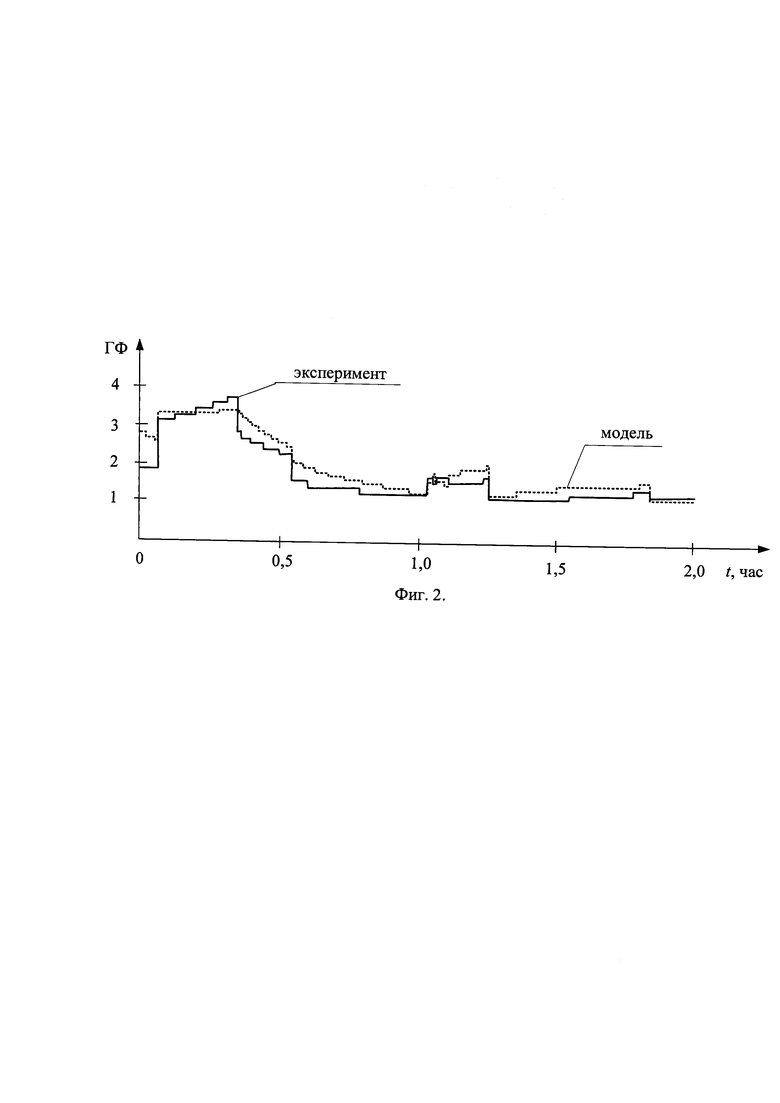
Способ имитационного статистического моделирования локомотивной интегрированной системы навигации поясняется представленной на фиг. 1 функционально-модульной структурой системы имитационного статистического моделирования. На фиг. 1 обозначено: АЗН-В - автоматическое зависимое наблюдение - вещательное; ОГ ГНСС - орбитальная группировка глобальной навигационной спутниковой системы; ИНС - инерциальная навигационная система. На фиг. 2 представлены результаты проверки достоверности модели движения орбитальной группировки ГНСС в виде значений геометрического фактора, полученных в результате моделирования и натурного эксперимента. На фиг. 2 обозначено: ГФ - геометрический фактор.
В соответствии со схемой фиг. 1 СИСМ включает имитационный модуль, навигационный модуль, модуль интерфейса и индикатор. Имитационный модуль содержит блок моделирования движения навигационных спутников (НС) орбитальной группировки ГНСС, блок формирования измерений ГНСС для имитации выходных данных приемника спутниковой системы навигации, блок формирования измерений инерциальной навигационной системы (ИНС); блок формирования измерений синхронной системы обмена данными АЗН-В, блок построения траектории движения локомотивов и блок приема и передачи данных. Навигационный модуль содержит блок экстраполяции навигационных параметров, блок фильтрации навигационных параметров и блок приема и передачи данных.
Имитационный модуль предназначен для формирования выходной информации навигационных измерителей, входящих в состав интегрированной системы навигации и построения траекторий движения локомотива. Навигационный модуль предназначен для реализации алгоритмом комплексной обработки навигационной информации. Модуль интерфейса предназначен для преобразования выходной информации имитационного модуля в формат данных навигационного модуля. Индикатор предназначен для отображения статистических характеристик функционирования имитируемых навигационных измерителей.
В блоке моделирования ОГ ГНСС реализуют возможность моделировать движение НС по реальным данным альманаха, кроме этого, можно изменять условия навигационного сеанса, а именно угол места, и исследовать характеристики ухудшения точности навигационного сеанса. Имитационная модель созвездия НС позволяет формировать значения псевдодальностей, координат и составляющих скорости для потребителя, находящегося в любой точке Земли или околоземного пространства, рассчитывать ГФ, пространственного и горизонтального ухудшения точности. С помощью данных алгоритма и программы имеется возможность прогнозирования условий навигационного сеанса, что особенно важно для организации исследований.
Затем информацию о параметрах движения навигационных спутников передают на вход блока формирования измерений ГНСС, на выходе которого имитируют выходные сигналы бортового оборудования ГНСС на основе математической модели функционирования объекта в пространстве состояний с учетом моделируемых условий распространения радиоволн. Так как решение задачи фильтрации в навигационном вычислителе осуществляется в дискретном времени, при синтезе и исследовании комплексных алгоритмов целесообразно использовать дискретные математические модели. При имитационном статистическом моделировании сигналов навигационных измерителей используют модель дискретного белого гауссовского шума, которая наилучшим образом аппроксимирует погрешности навигационных систем и помехи каналов обмена данными и навигационных наблюдений, обусловленные условиями распространения радиоволн.
В блоке формирования измерений АЗН-В имитируют значения радионавигационных параметров после первичной обработки с учетом условий распространения радиоволн и собственных погрешностей транспондера.
В блоке формирования измерений ИНС при проведении имитационного статистического моделирования используют математическую модель ошибок в дискретном времени. Модель предназначена для прогнозирования шулеровских дрейфов ИНС на длительных интервалах времени.
В ходе проведения моделирования локомотив представляют в виде материальной точки, перемещающейся в заданной системе координат по имитируемой траектории движения. Полученные в результате моделирования значения погрешностей плановых координат и скоростей ИНС суммируют с известными значениями соответствующих компонент траектории движения локомотива и подают на первый вход блока приема и передачи данных в качестве модели измерений от ИНС, на второй и третий входы блока подают сформированные выходные данные формирователя измерений ГНСС и транспондера системы АЗН-В, входы которого соединены с выходом блока построения траекторий локомотивов. Благодаря этому в блоке приема и передачи сообщений создается сообщение о модели траектории локомотива с ошибками измерений и о модели навигационных параметров спутниковой и инерциальной систем навигации.
Всю совокупность выходной информации блока приема и передачи данных передают на первый вход модуля интерфейса и преобразуют в формат данных навигационного модуля, с первого выхода интерфейса данные передают на вход блока приема и передачи данных навигационного модуля, в котором формируют сообщение для блока экстраполяции навигационных параметров, в котором их преобразуют в данные для последующего шага цикла формирования координат и навигационных параметров с учетом динамики изменения траектории локомотива и ошибок навигационных измерителей.
Сформированные данные с выхода блока экстраполяции навигационных параметров подают на вход блока фильтрации навигационных параметров для формирования статистических оценок координат на имитируемой траектории. Выходными данными блока фильтрации навигационных параметров являются оценка погрешностей определения пространственных координат локомотива и ошибка оценки, которые через блок приема и передачи данных навигационного модуля передают на второй вход модуля интерфейса, со второго выхода которого данные выводят на индикатор.
С целью анализа адекватности реализуемых математических моделей проводят их сравнение с оригиналами. В частности, для оценки соответствия разработанной модели реальному движению НС по орбитам были проведены эксперименты на базе измерительного пункта с координатами, известными с геодезической точностью, оборудованного навигационным приемником спутниковой навигации МНП-М3, сопряженным с персональным компьютером. Адекватность математической модели оценивалась по совпадению интервалов нахождения спутников в зоне видимости в соответствии с их номерами, а также сравнивались расчетные и реально наблюдаемые экспериментальные значения геометрического фактора. Полученные результаты моделирования с приемлемой точностью совпадают с реальными наблюдениями и данными Информационно-аналитического центра координатно-временного и навигационного обеспечения ГЛОНАСС, расхождение моментов времени наступления событий составляет от 1 до 3 мин, что является вполне приемлемым для суточных измерений. На фиг. 2 показаны графики расчетных и экспериментальных значений ГФ в пункте наблюдения. Сравнение расчетных и наблюдаемых значений ГФ показывает достоверность разработанной модели (расхождение составляет десятые доли). Следовательно, разработанную модель траекторного движения спутников ОГ ГНСС можно использовать для проведения исследований характеристик ЛИСН.
Техническим результатом заявленного способа является создание системы имитационного статистического моделирования испытаний локомотивной интегрированной системы навигации, позволяющей на этапе ее проектирования провести исследование функционирования подсистем путем имитации их функционирования в моделируемых ожидаемых условиях эксплуатации, позволяющей сократить расходы на проведение организационно-технических мероприятий и материально-техническое обеспечение, сопровождающие крупномасштабные испытания сложных технических систем.
Использование предлагаемого способа имитационного статистического моделирования локомотивной интегрированной системы навигации позволяет производить исследования точностных характеристик навигационных алгоритмов комплексной обработки информации и определение оптимальных параметров исследуемых подсистем как сложных технических систем с целью снижения материальных затрат на этапе проведения научных и проектных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| Система управления движением поездов в режиме виртуальной сцепки | 2024 |
|
RU2828911C1 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2011 |
|
RU2499713C2 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2809110C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, комплексированная с инерциальной навигационной системой, обеспечивающая высокоточное позиционирование движущихся объектов | 2023 |
|
RU2802322C1 |
| УСТРОЙСТВО АВТОМАТИЗИРОВАННОГО МОДЕЛИРОВАНИЯ И ИСПЫТАНИЙ | 2017 |
|
RU2661539C1 |
| ТРЕНАЖЕР ДЛЯ ПРОФЕССИОНАЛЬНОЙ ПОДГОТОВКИ МАШИНИСТОВ ЛОКОМОТИВОВ И ОБСЛУЖИВАЮЩЕГО ПЕРСОНАЛА | 2015 |
|
RU2596042C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2016 |
|
RU2618660C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗА УПРАВЛЕНИЕМ ПОЕЗДА И БДИТЕЛЬНОСТЬЮ МАШИНИСТА | 2012 |
|
RU2497704C2 |
Способ относится к области имитационного статистического моделирования локомотивных систем навигации. Система, реализующая способ, включает индикатор для отображения статических характеристик, имитационный модуль для формирования выходной информации навигационных измерителей, навигационный модуль для реализации алгоритмом комплексной обработки навигационной информации и связывающий их модуль интерфейса. Имитационный модуль содержит блок моделирования движения навигационных спутников орбитальной группировки ГНСС, блок формирования измерений ГНСС для имитации выходных данных приемника спутниковой системы навигации, блок формирования измерений инерциальной навигационной системы (ИНС); блок формирования измерений синхронной системы обмена данными АЗН-В, блок построения траектории движения локомотивов и блок приема и передачи данных. Навигационный модуль содержит блок экстраполяции навигационных параметров, блок фильтрации навигационных параметров и блок приема и передачи данных. Достигается возможность проведения исследований особенностей функционирования локомотивной интегрированной системы навигации на этапе ее проектирования. 2 ил.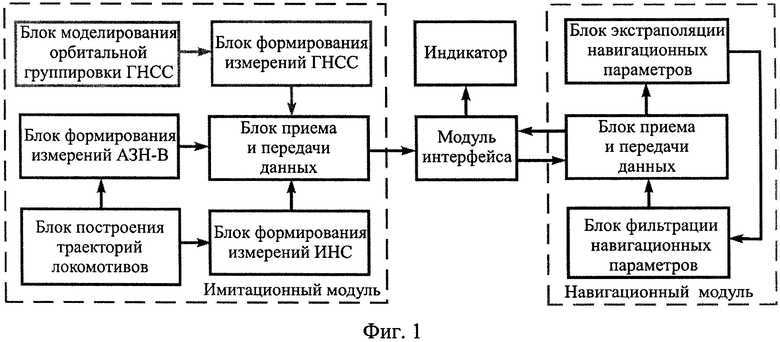
Способ имитационного статистического моделирования локомотивной интегрированной системы навигации, содержащий разработку различных сценариев окружающей внешней обстановки, моделей функционирование элементов и средств локомотивной интегрированной системы навигации, отличающийся тем, что моделируют функционирование навигационных средств и различные условия распространения радиоволн, влияющих на точность определения навигационных параметров локомотивной навигационной аппаратурой, дополнительно разрабатывают имитационный и навигационный модули, которые обмениваются информацией через модуль интерфейса, причем в имитационном модуле используют программно реализованные алгоритмы, объединенные в блоки: моделирования орбитальной группировки (ОГ) глобальной навигационной спутниковой системы (ГНСС); формирования измерений ГНСС; построения траекторий локомотивов; формирования измерений системы вещательного автоматического зависимого наблюдения (АЗН-В); формирования измерений инерциальной навигационной системы (ИНС), передают данные с блока моделирования ОГ ГНСС через блок формирования измерений ГНСС на первый вход блока приема и передачи данных, на второй и третий входы подают данные соответственно с выходов блоков формирования измерений ИНС и формирования измерений АЗН-В, формируют в блоке приема и передачи данных сообщение о моделях параметров траекторного движения локомотива и навигационных измерений ГНСС, ИНС и системы АЗН-В, выдают сформированное сообщение на первый вход модуля интерфейса и преобразуют его в формат данных навигационного модуля, передают сообщение с первого выхода блока интерфейса на блок приема и передачи данных навигационного модуля, после чего передают сообщение в блок экстраполяции навигационных параметров, результаты экстраполяции передают в блок фильтрации навигационных параметров, формируют статистические оценки параметров движения локомотива на имитируемой траектории, передают информацию через блок приема и передачи данных и модуль интерфейса на индикатор, анализируют статистические характеристики функционирования имитируемых навигационных измерителей.
| СПОСОБ ИМИТАЦИИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ РАДИОЛОКАЦИОННЫХ СИСТЕМ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2586966C1 |
| Способ получения хлора и сульфатов щелочных металлов | 1944 |
|
SU65085A1 |
| СПОСОБ ИМИТАЦИОННОГО СТАТИСТИЧЕСКОГО МОДЕЛИРОВАНИЯ РАДИОЭЛЕКТРОННОГО ВООРУЖЕНИЯ НАДВОДНЫХ КОРАБЛЕЙ | 2009 |
|
RU2399096C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ МОДЕЛИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 1992 |
|
RU2049311C1 |
| СПОСОБ ПОЛУЧЕНИЯ БИОЛОГИЧЕСКИ АКТИВНОГО ПРОДУКТА "ТРИОКРИН" | 2010 |
|
RU2423880C1 |

