Изобретение относится к авиации, в частности к системам посадки воздушных судов (ВС), в общем случае - летательных аппаратов (ЛА), и применимо для космических аппаратов и при посадке на корабли.
Такие системы содержат наземную и бортовую аппаратуру, наземная аппаратура включает наземный запросчик, ряд наземных станций с наземными приемниками, соединенных выходами со входами центральной станции с приемо-передающей системой на выходе, вычислителем координат ЛА, наземной ЭВМ, модулем отклонений ЛА от траектории посадки (глиссады), соединенным входами с вычислителем координат и базой параметров аэропорта, а выходом со входом модуля сигналов управления, соединенным выходом со входом приемопередающего узла центральной станции, бортовая аппаратура содержит ответчик, высотомер, бортовую аппаратуру управления с рабочим местом пилота, выход высотомера соединен со входом ответчика, вход которого через радиолинию запрос-ответ связан с наземным запросчиком и наземными приемниками, бортовая аппаратура управления связана входом-выходом через радиолинию земля-борт с приемопередающим узлом центральной станции.
В таких системах [1-3] в наземной ЭВМ вычисляются дальномерным способом координаты ЛА и его отклонения от заданной траектории при посадке. В указанных системах используется только радиолокационный способ навигации, при котором координаты и отклонения определяются с большими погрешностями, недопустимыми при высокой категории посадки.
Повышение точности определения местоположения ЛА достигается при использовании комбинации радиолокационного и спутникового способов.
Так в [4] радиолокационный дальномер совмещен со спутниковой навигационной системой, при этом определяются относительные координаты в группе ЛА.
Проблема точности относительного режима возникает при его использовании для посадки ЛА на движущуюся платформу (палубу корабля).
Известно устройство посадки ЛА [5], в котором в наземную аппаратуру введен дополнительный наземный спутниковый приемник ГНСС и определяются относительные координаты между ЛА и местом посадки. В [5] не учитывается влияние качки и крена корабля на точность определения относительных координат.
В [6] предлагается комплекс управления полетами ЛА морского базирования, где вычисляются относительные координаты между подвижными площадками базирования и ЛА при заходе на посадку. Однако, также не показано, как производится учет качки корабля.
Учет скорости ветра, параметров продольных и поперечных колебаний корабля - качки производится, например, в [7, 8].
При определении относительных координат возникает проблема связанная с изменением рабочего созвездия навигационных спутников, например [9].
В указанных патентах об использовании относительного режима не рассматривается вопрос определения абсолютных координат ЛА. Однако при навигации и посадке ЛА необходимо рассмотрение комплексного совмещения режимов и определения абсолютных и относительных координат, расчета отклонений координат от заданной траектории. Такой подход существенно повысит функциональность системы, расширит ее применимость. Необходимо также дальнейшее повышение точностных характеристик относительного режима навигации.
Прототипом настоящего изобретения является система посадки по патенту [10].
Данная система посадки ЛА, обеспечивающая дальномерный и спутниковый способы определения координат ЛА, содержит наземную и бортовую аппаратуру, при этом наземная аппаратура включает запросчик, в общем случае N наземных станций с наземными приемниками, центральную станцию с вычислителем координат, электронной вычислительной машиной (ЭВМ), наземным приемо-передающим узлом и базой данных взлетно-посадочной полосы (ВПП), при этом выходы запросчика и наземных приемников через сигнальные линии связи соединены со входом вычислителя координат, дополнительный вход которого соединен с выходом базы данных ВПП, наземный приемо-передающий узел связан с входом/выходом ЭВМ, в ЭВМ сформированы модуль отклонений от заданной траектории и модуль сигналов управления, при этом первый вход модуля отклонений от заданной траектории соединен с выходом вычислителя координат, второй его вход соединен с выходом базы данных ВПП, а выход соединен с первым входом модуля сигналов управления, выход которого связан с входом/выходом наземного приемо-передающего узла, бортовая аппаратура включает бортовой приемник сигналов глобальной навигационной спутниковой системы (ГНСС) с приемной антенной на входе и первым и вторым выходами, высотомер, бортовой ответчик, выход которого соединен через радиолинию «запрос-ответ» с запросчиком и наземными приемниками, бортовую аппаратуру управления вход/выход которой через бортовой приемопередающий узел и двустороннюю линию управления посадкой связан с входом/выходом наземного приемо-передающего узла.
Заметим, что описание прототипа конкретизировано реально используемыми узлами и связями - приемо-передающие узлы, связи между модулями на центральной станции. Запросчик обычно размещается на одной из наземных станций.
Кроме того, система прототип использует совмещение с наземной системой автоматического зависимого наблюдения (АЗН-В) для подтверждения достоверности определения координат и вектора скорости ЛА.
В упомянутой системе рассматривается только задача повышения точности при определении абсолютных координат с помощью псевдоспутников, при этом использование псевдоспутников усложняет систему, снижая общую надежность.
В предлагаемой заявке решается техническая проблема повышения точности и надежности посадки ЛА при комплексном использования радиолокационного и спутникового способов посадки с определением абсолютных и относительных координат ЛА и отклонений координат ЛА от заданной траектории.
При этом, по возможности, наземные узлы и блоки обеспечивающие дальномерный способ определения координат, называются дальномерными -для обобщения с корабельной посадкой.
Техническую проблему решает система посадки ЛА, обеспечивающая дальномерный и спутниковый способы определения координат ЛА, содержащая наземную и бортовую аппаратуру, при этом наземная аппаратура включает запросчик, в общем случае N дальномерных станций с дальномерными приемниками, центральную станцию с вычислителем координат, электронной вычислительной машиной (ЭВМ), наземным приемопередающим узлом и базой данных взлетно-посадочной полосы (ВПП), при этом выходы запросчика и дальномерных приемников через сигнальные линии связи соединены со входом вычислителя координат, дополнительный вход которого соединен с выходом базы данных ВПП, в ЭВМ сформированы модуль отклонений от заданной траектории и модуль сигналов управления, при этом первый вход модуля отклонений от заданной траектории соединен с выходом вычислителя координат, второй его вход соединен с выходом базы данных ВПП, а выход соединен с первым входом модуля сигналов управления, выход/вход которого связан со входом/выходом наземного приемо-передающего узла, бортовая аппаратура включает бортовой приемник сигналов глобальной навигационной спутниковой системы (ГНСС) с приемной антенной на входе и первым и вторым выходами, высотомер, бортовой ответчик, выход которого соединен через радиолинию «запрос-ответ» с запросчиком и дальномерными приемниками, бортовую аппаратуру управления, вход/выход которой через бортовой приемо-передающий узел и двустороннюю линию управления посадкой связан с входом/выходом наземного приемо-передающего узла, при этом, в наземную аппаратуру введены дополнительный приемник ГНСС, модуль относительных координат, дополнительный модуль отклонений от заданной траектории, выделитель сигналов, при этом выход дополнительного приемника ГНСС соединен с первым входом модуля относительных координат, второй вход которого соединен через выделитель сигналов с наземным приемопередающим узлом, выход модуля относительных координат подключен к первому входу дополнительного модуля отклонений от заданной траектории, второй вход которого соединен с выходом базы данных ВПП, а выход подключен к дополнительному входу модуля сигналов управления, причем модуль сигналов управления выполнен с функцией распознавания сигналов с наименьшей ошибкой определения отклонения от заданной траектории, в бортовую аппаратуру введен блок определения высоты, первый вход которого соединен с высотомером, второй вход подключен к первому выходу бортового приемника ГНСС, второй выход которого соединен со входом бортовой аппаратуры управления, при этом блок определения высоты выполнен с возможностью оптимальной обработки поступающих значений высоты.
Техническим результатом, получаемым при этом, является повышение точности и надежности посадки путем совмещения дальномерного и спутникового способов посадки с использованием относительных координат ЛА. Дополнительные технические результаты - расширение функциональных возможностей системы, зависимых, в том числе, от ее назначения.
Предлагается вариант системы для посадки на корабли и другие мобильные площадки. При этом далее будем использовать понятие качки корабля в соответствии с общепринятым в морской терминологии определением качки, которое включает: вертикальную, бортовую (по крену), килевую (по дифференту) качку, а также рыскание [11]. В предлагаемой системе на корабле размещены дальномерные станции с запросчиком и центральная станция, а база данных ВПП содержит координаты дальномерных станций и ВПП в относительной системе координат с центром, например, в точке посадки на ВПП, введены блок параметров качки и модуль компенсации качки, при этом выход блока параметров качки соединен с первым входом модуля компенсации качки, второй вход которого подключен к выходу дополнительного приемника ГНСС, выход модуля компенсации качки подключен к третьему входу модуля относительных координат.
Предлагается вариант системы с дополнительной функцией использования дальномерной системы для определения параметров качки, где введены дополнительный блок параметров качки, входом соединенный с выходом запросчика и дальномерных приемников, а выходом с третьим входом модуля компенсации качки, выполненный с функцией комплексной обработки ее параметров, полученных из блока параметров качки и дополнительного блока параметров качки.
Предлагается вариант системы с коррекцией ошибки при кратковременном исчезновении сигнала ГНСС, где введен модуль комплексной обработки, первый вход которого соединен с выходом вычислителя координат, второй вход которого соединен с выходом модуля относительных координат, а выход подключен к третьему входу модуля отклонений от заданной траектории, причем комплексная обработка координат выполняется, например, по способу оптимальной фильтрации двух навигационных измерений одного и того же параметра.
Предлагается вариант системы посадки, в котором вырабатывается запрет на посадку при превышении критической ошибки определения координат, где введены бортовой выделитель сигналов и модуль запрета посадки, вход которого соединен с выходом бортового выделителя сигналов, соединенного по входу с дополнительным выходом бортового приемопередающего узла, а выход соединен с дополнительным входом бортовой аппаратуры управления, в которой сигнал с модуля запрета посадки используется для принятия решения о продолжении выполнения ЛА захода на посадку или об уходе на «второй круг» в соответствии с условием:

Где Dкат - минимальная дальность до расчетной точки посадки ЛА, зависящая от категории системы посадки;
Вкрит - критическая дальность, на которой выполняются требования к точности определения координат для заданной категории системы посадки, определяемая в соответствии с выражением:
где Z - расстояние между дальномерными приемниками (ширина корабля); σкат - необходимая точность определения координат ЛА, зависящая от категории системы посадки;  - погрешность измерений дальности до ЛА на центральной станции.
- погрешность измерений дальности до ЛА на центральной станции.
Предлагается вариант системы посадки нескольких ЛА, для чего двухсторонняя радиолиния управления посадки выполняется путем использования в качестве наземного приемо-передающего узла наземной аппаратуры системы автоматического зависимого наблюдения вещательного режима (АЗН-В), а в качестве бортового приемо-передающего узла на данном и других ЛА путем использования бортовой аппаратуры АЗН-В.
Работа предлагаемой системы поясняется с помощью фиг.1-8.
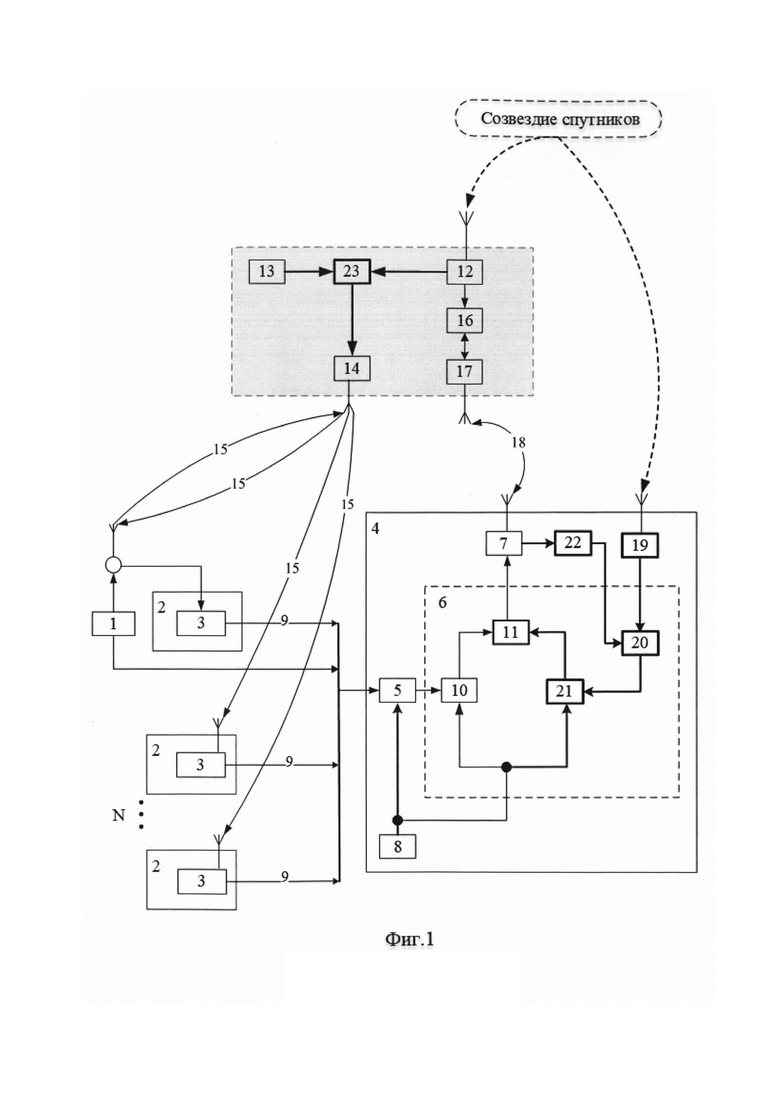
Фиг. 1 - Общая блок-схема системы посадки.
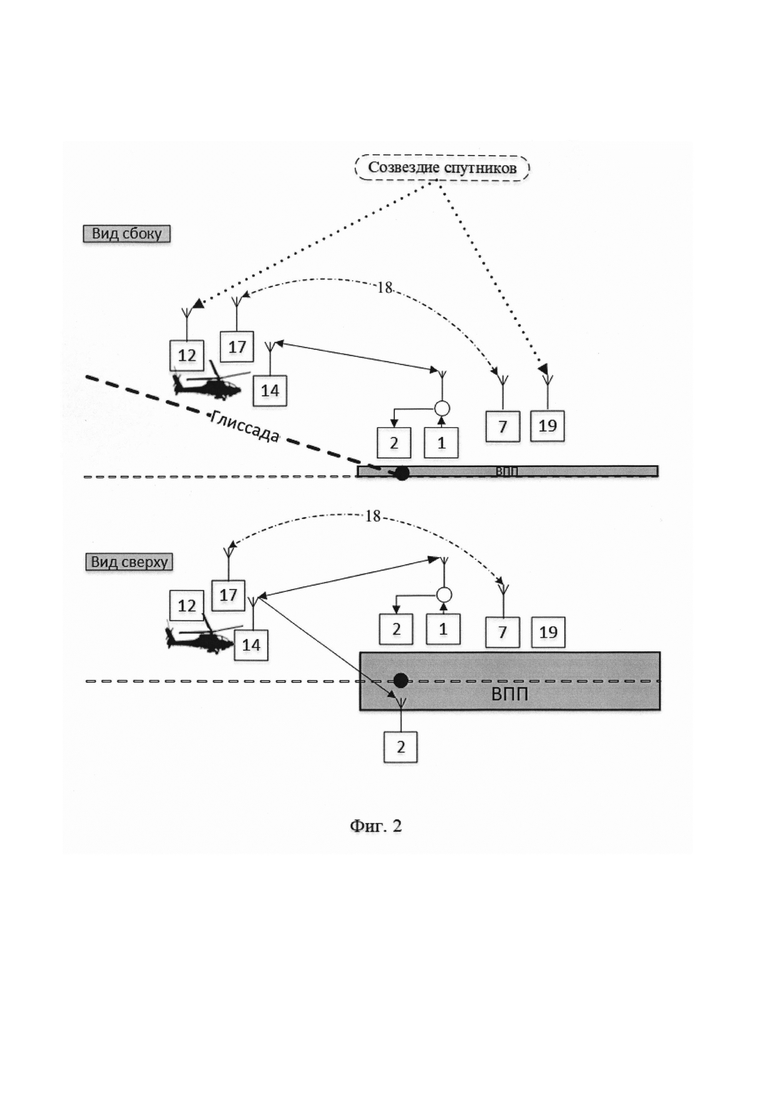
Фиг.2 - Схема пространственного расположения блоков и модулей относительно ВПП и ЛА.
Фиг. 3 - Блок-схема системы посадки с посадкой на корабль (подвижные платформы).
Фиг. 4 - Схема пространственного расположения блоков и модулей относительно палубы корабля и ЛА.
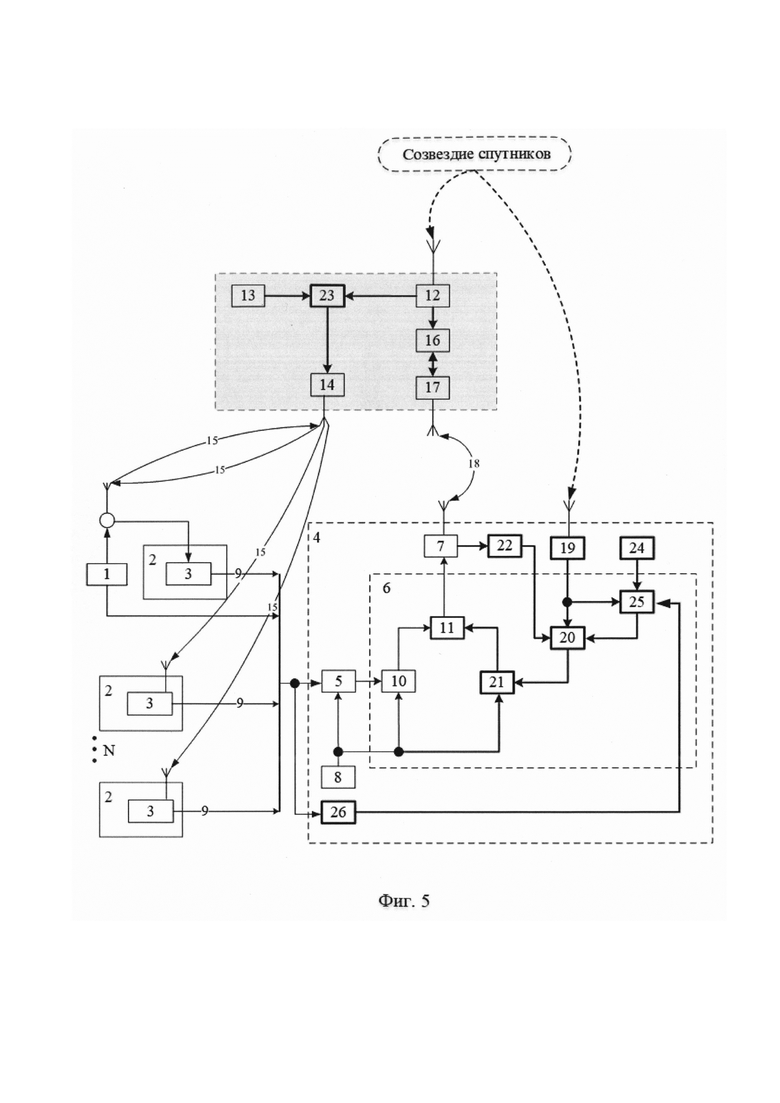
Фиг. 5 - Блок-схема системы с использованием дальномерной системы для определения параметров качки.
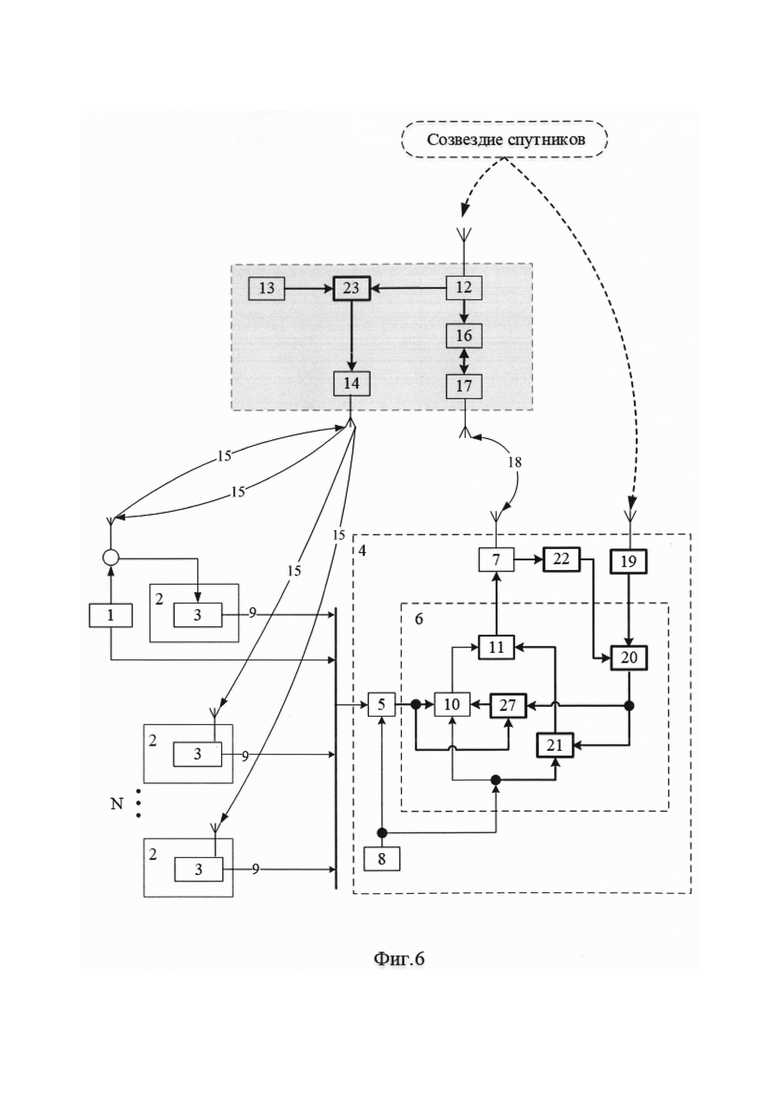
Фиг. 6 - Блок-схема системы с комплексной обработкой информации
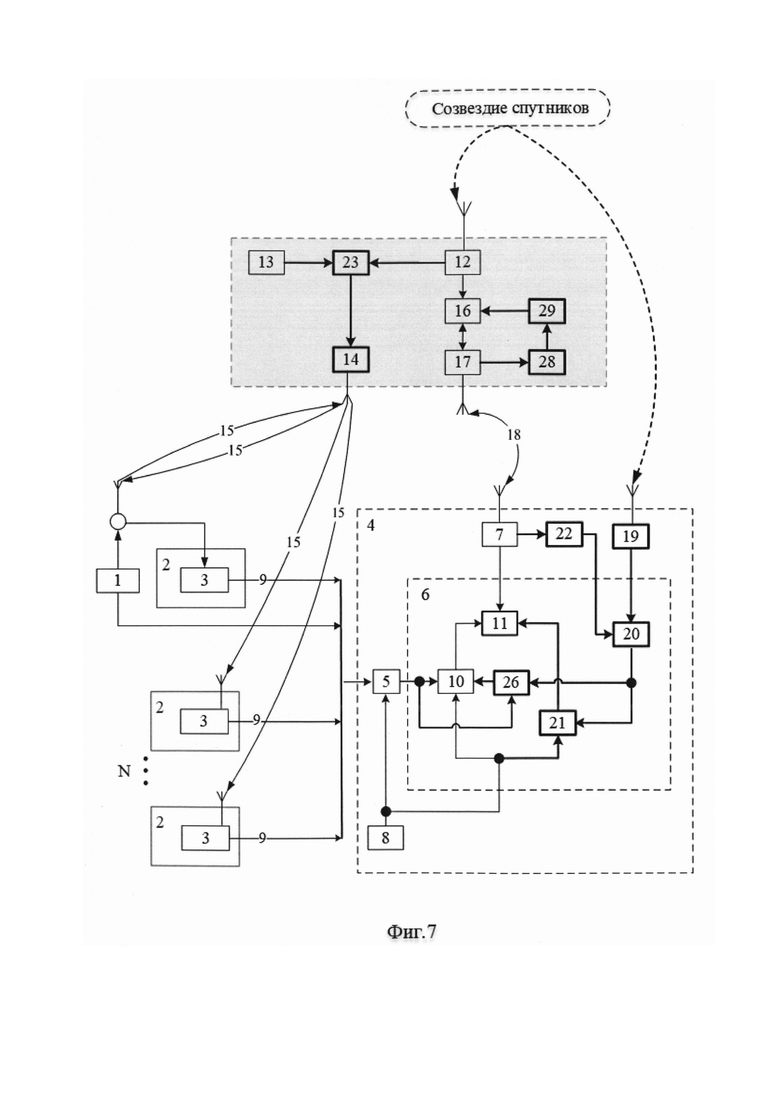
Фиг. 7 - Блок-схема системы посадки с функцией запрета посадки ЛА при превышении ошибки местоопределения нормированного значения.
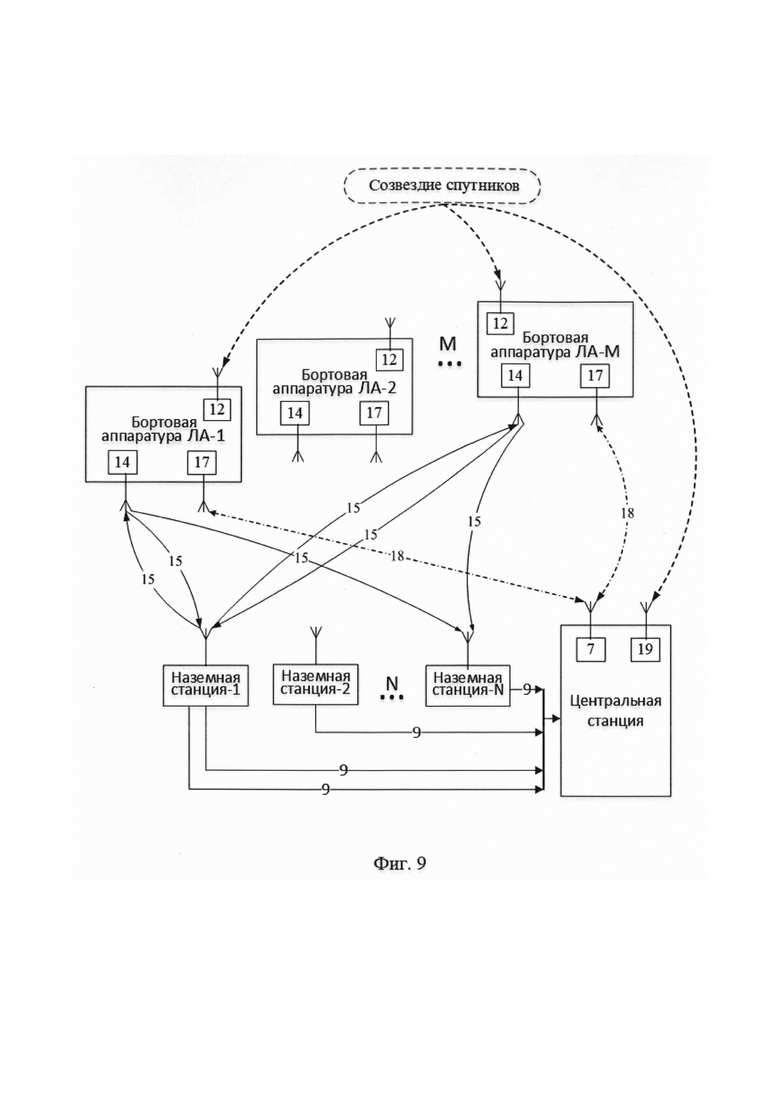
Фиг. 8 - Схема системы посадки при посадке нескольких ЛА.
Фиг. 9 - Схема пространственного расположения ЛА, корабля и дальномерных приемников с указанием расчетной точки посадки.
Вновь введенные узлы и связи отмечены на рисунках черными жирными линиями.
Согласно фиг.1 система содержит наземную и бортовую аппаратуру, при этом наземная аппаратура включает запросчик 1, в общем случае N дальномерных станций 2 с дальномерными приемниками 3, центральную станцию 4 с вычислителем координат 5, электронной вычислительной машиной (ЭВМ) 6, наземным приемо-передающим узлом 7 и базой данных взлетно-посадочной полосы (ВПП) 8, при этом выходы запросчика и дальномерных приемников через сигнальные линии связи 9 соединены со входом вычислителя координат 5, дополнительный вход которого соединен с выходом базы данных ВПП 8, в ЭВМ сформированы модуль отклонений от заданной траектории 10 и модуль сигналов управления 11, при этом первый вход модуля отклонений от заданной траектории соединен с выходом вычислителя координат 5, второй его вход соединен с выходом базы данных ВПП 8, а выход соединен со входом модуля сигналов управления 11 вход/выход которого связан со входом/выходом, наземного приемо-передающего узла 7, бортовая аппаратура включает бортовой приемник сигналов глобальной навигационной спутниковой системы (ГНСС) 12 с приемной антенной на входе и первым и вторым выходами, высотомер 13, бортовой ответчик 14, выход которого соединен через радиолинию «запрос-ответ» с запросчиком 1 и дальномерными приемниками 3, бортовую аппаратуру управления 16, вход/выход которой через бортовой приемопередающий узел 17 и двухстороннюю линию управления посадкой 18 связан с входом/выходом наземного приемо-передающего узла 7. В наземную аппаратуру введены дополнительный приемник ГНСС 19, модуль относительных координат 20, дополнительный модуль отклонений от заданной траектории 21, выделитель сигналов 22, при этом выход дополнительного приемника ГНСС 19 соединен с первым входом модуля относительных координат 20, второй вход которого соединен через выделитель сигналов 22 с наземным приемо-передающим узлом 7, выход модуля относительных координат 20 подключен к первому входу дополнительного модуля отклонений от заданной траектории 21, второй вход которого соединен с выходом базы данных ВПП 8, а выход подключен к дополнительному входу модуля сигналов управления 11, причем модуль сигналов управления выполнен с функцией распознавания сигналов с наименьшей ошибкой определения отклонения от заданной траектории.
В бортовую аппаратуру введен блок определения высоты 23, первый вход которого соединен с высотомером 13, второй вход подключен к первому выходу бортового приемника ГНСС 12, второй выход которого соединен со входом бортовой аппаратуры управления 16, при этом блок определения высоты выполнен с возможностью оптимальной обработки поступающих значений высоты.
Работа системы, блок-схема которой приведена на фиг.1, в части использования дальномерных измерений в бортовой и наземной аппаратуре, модули и блоки которой отображаются тонкими линиями, полностью аналогична прототипу [10]. В запросчике 1 формируется и излучается запросный сигнал. Бортовой ответчик 14 излучает ответный сигнал с данными о высоте полета ЛА, который принимается на каждой дальномерной станции ДС 2 дальномерным приемником ДП 3. С выхода ДП 3 ответный сигнал передается по линии связи 9 в ЦС 4 на вход вычислителя координат 6, где фиксируется время прихода сигнала с каждого ДП 3. По расстоянию между ДП и ЦС определяют время прихода сигналов в ДП. По времени задержки ответных сигналов и известной координатной привязке всех ДП определяют координаты ЛА дальномерным способом. Особенностью работы является использование блока определения высоты, куда поступают сигналы с бортового высотомера и с приемника ГНСС. Высота, определяемая по созвездию спутников ГНСС, более точная, чем в бортовом высотомере. Однако при изменении рабочего созвездия, пропадании сигнала, точность может снижаться. В блоке определения высоты происходит определение наиболее точного значения высоты путем оптимальной обработки поступающих сигналов. По сигналам, излучаемым созвездием спутников, принимаемым бортовым приемником БП 10, определяются псевдодальности ЛА, по которым определяется его высота, которая поступает в бортовой ответчик 14 и через радиолинию «запрос-ответ» транслируется на наземную станцию 2.
Такая работа системы необходима на этапе подхода к точке посадки. Далее при посадке требуется более высокая точность, что обеспечивается относительным режимом, реализуемым с помощью вновь введенных модулей, блоков и связей, выделенных жирными линиями.
Далее система работает следующим образом. В дополнительном приемнике ГНСС 19 в момент времени ti, (i=0,1,2,…) определяется вектор координат его антенны  который поступает на второй вход модуля относительных координат 20, на первый вход которого с выхода выделителя входных сигналов 22 поступает вектор координат антенны бортового приемника ГНСС
который поступает на второй вход модуля относительных координат 20, на первый вход которого с выхода выделителя входных сигналов 22 поступает вектор координат антенны бортового приемника ГНСС  определяемый в бортовом приемнике ГНСС 12 в момент времени tj, (j=0,1,2,…) и передаваемый с помощью бортовой аппаратуры управления 16 через бортовой приемо-передающий узел 17 и двустороннюю радиолинию управления посадкой 18 в наземный приемопередающий узел 7, выход которого через выделитель сигналов 22 соединен со вторым входом модуля относительных координат 20, где осуществляется синхронизация выполненных в бортовом 12 и дополнительном 19 приемниках ГНСС измерений векторов координат на момент времени tn=ti=tj, (n=0,1,2,…) путем выбора одномоментных измерений и вычисление вектора относительных координат
определяемый в бортовом приемнике ГНСС 12 в момент времени tj, (j=0,1,2,…) и передаваемый с помощью бортовой аппаратуры управления 16 через бортовой приемо-передающий узел 17 и двустороннюю радиолинию управления посадкой 18 в наземный приемопередающий узел 7, выход которого через выделитель сигналов 22 соединен со вторым входом модуля относительных координат 20, где осуществляется синхронизация выполненных в бортовом 12 и дополнительном 19 приемниках ГНСС измерений векторов координат на момент времени tn=ti=tj, (n=0,1,2,…) путем выбора одномоментных измерений и вычисление вектора относительных координат  в соответствии с формулой:
в соответствии с формулой:

Вектор  не содержит коррелированных составляющих ошибок измерений координат, одномоментно полученных на земле и на ЛА [5], что и обеспечивает высокую точность определения относительного положения ЛА в системе координат, связанной с дополнительным приемником ГНСС.
не содержит коррелированных составляющих ошибок измерений координат, одномоментно полученных на земле и на ЛА [5], что и обеспечивает высокую точность определения относительного положения ЛА в системе координат, связанной с дополнительным приемником ГНСС.
Далее вектор  поступает на второй вход дополнительного модуля отклонений от заданной глиссады 20, на первый вход которого поступают параметры заданной глиссады из базы данных ВПП 8, и вычисляется вектор отклонения ЛА от заданной глиссады ECCH с компонентами вертикального (Ег) и горизонтального (Ек) отклонения на основе использования стандартных для систем спутниковой посадки алгоритмов, например, как указано в [12]. Вычисленные компоненты вектора ECCH поступают на дополнительный вход модуля формирования сигналов управления 11, на первый вход которого поступает вектор отклонения ЛА от заданной траектории из модуля отклонений от заданной траектории 10, сформированный на основе дальномерного способа навигации - ЕДСН. При этом, модуль 11 снабжен функцией распознавания сигналов с наименьшей ошибкой определения отклонения от заданной глиссады.
поступает на второй вход дополнительного модуля отклонений от заданной глиссады 20, на первый вход которого поступают параметры заданной глиссады из базы данных ВПП 8, и вычисляется вектор отклонения ЛА от заданной глиссады ECCH с компонентами вертикального (Ег) и горизонтального (Ек) отклонения на основе использования стандартных для систем спутниковой посадки алгоритмов, например, как указано в [12]. Вычисленные компоненты вектора ECCH поступают на дополнительный вход модуля формирования сигналов управления 11, на первый вход которого поступает вектор отклонения ЛА от заданной траектории из модуля отклонений от заданной траектории 10, сформированный на основе дальномерного способа навигации - ЕДСН. При этом, модуль 11 снабжен функцией распознавания сигналов с наименьшей ошибкой определения отклонения от заданной глиссады.
Как известно [4], при реализация описанной выше процедуры нет необходимости в определении точных собственных абсолютных координат дополнительного приемника ГНСС, а достаточно определения его положения относительно точки посадки. Следовательно, при формировании вектора отклонений ЛА от заданной траектории посадки ЕССН в относительном режиме навигации отсутствует необходимость точной геодезической привязки антенны дополнительного приемника ГНСС 19, что существенно повышает оперативность и мобильность применения предлагаемой системы посадки.
На фиг.2 представлена схема пространственного расположения блоков и модулей относительно ВПП и ЛА.
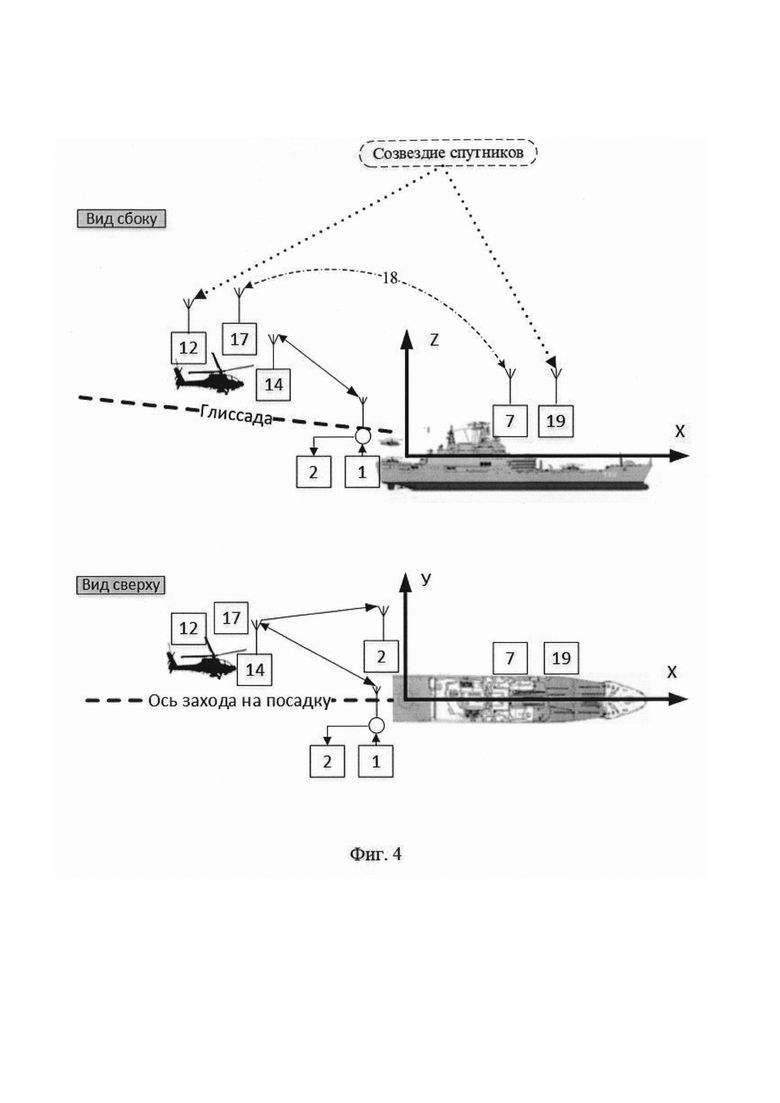
Дальнейшее усовершенствование предлагаемой системы посадки проводится комбинацией абсолютного и относительного режимов местоопределения при посадке ЛА на корабль или другую движущуюся платформу.
На фиг.3 представлена блок-схема построения предлагаемой системы посадки при размещении ее на корабле. При этом определение координат производится в локальной системе координат с центром, например, в точке посадки. Ее особенностью является, что при посадке ЛА на корабли и другие мобильные площадки, дальномерные станции 2 и центральная станция 4 размещены на корабле, при этом введены блок параметров качки 24 и модуль компенсации качки 25.
Работа такой системы в части использования дальномерных и спутниковых измерений в бортовой и корабельной аппаратуре, модули и блоки которой представлены на фиг.1, полностью соответствует приведенному выше описанию. Особенностью работы системы является пересчет координат антенны дополнительного приемника ГНСС 19 из абсолютной системы координат в локальную систему координат с центром, например, в точке посадки на ВПП. С целью исключения влияния качки корабля на относительные координаты ЛА производится компенсация качки корабля.
Известны различные способы определения параметров качки корабля. В данной системе предлагается радиолокационный способ, который может использоваться одновременно с другими способами и оказаться точнее других способов. Для этого используется размещенная на корабле дальномерная система, положение антенн в которой задано в системе координат связанной с кораблем. В этом случае дальномерная система обладает дополнительной функцией, т.е. кроме определения абсолютных координат позволяет определить параметры качки корабля. При этом, точность определения этих параметров может быть выше, чем корабельными приборами.
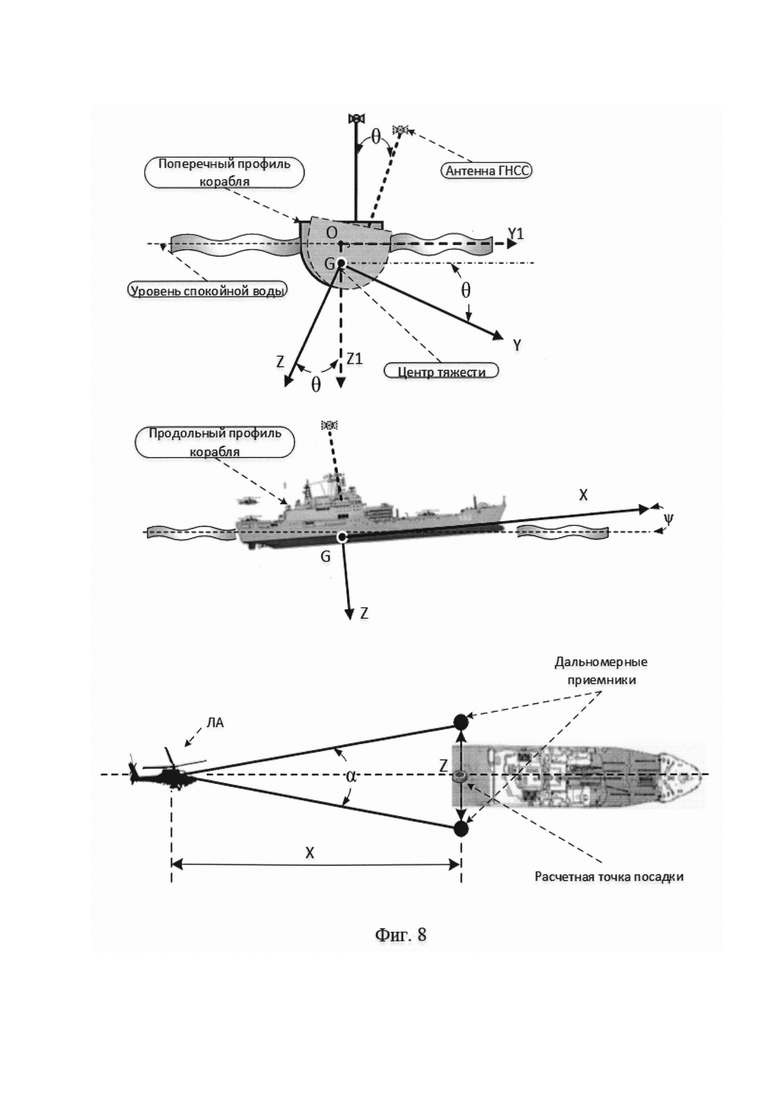
Для этого на вход модуля компенсации качки 25 с выхода блока параметров качки 24 поступают: угол бортовой качки (крен) - θ, угол килевой качки (дифферент) - ψ и угол рыскания (курс) - σ, которые используются для расчета матрицы С пересчета координат антенны ГНСС дополнительного приемника ГНСС 19 из системы координат GXYZ c центром в центре тяжести корабля (G) и жестко связанной с корпусом корабля, в локальную систему координат OX1Y1Z1, с плоскостью OX1Y1, совпадающей с невозмущенной поверхностью воды и осью OZ1, направленной вертикально вниз. На фиг.8 представлено взаимное положение упомянутых систем координат относительно поверхности воды, корпуса корабля и антенны ГНСС, ось ОХ ориентирована в направлении вектора скорости движения корабля в горизонтальной плоскости, а ось GX направлена к носу корабля.
В отсутствии качки корабля плоскости GXY и OX1Y1 параллельны. Для определения взаимного положения этих систем координат в произвольный момент времени используется система эйлеровых углов [13].
Пересчет из местной системы координат OX1Y1Z1 в систему GXYZ, жестко связанную с корпусом корабля, осуществляется по формуле:

где матрица преобразования С выглядит следующим образом [13]:

Вектор  в уравнении (2) определяет координаты центра тяжести корабля в системе координат OX1Y1Z1, а соответствующие углы крена, дифферента и рыскания непрерывно определяются (измеряются) в блоке параметров качки 24 и передаются на вход модуля компенсации качки 25, с выхода которого стабилизированные значения координат антенны дополнительного приемника 17 поступают на вход модуля относительных координат 19.
в уравнении (2) определяет координаты центра тяжести корабля в системе координат OX1Y1Z1, а соответствующие углы крена, дифферента и рыскания непрерывно определяются (измеряются) в блоке параметров качки 24 и передаются на вход модуля компенсации качки 25, с выхода которого стабилизированные значения координат антенны дополнительного приемника 17 поступают на вход модуля относительных координат 19.
Далее, в блоке компенсации качки 25, используя выражение (2), рассчитывают координаты точки расположения корабельной антенны ГНСС в местной системе координат на любой момент времени tn, зная ее координаты в связанной с кораблем системе координат. Следует заметить, что координаты антенны ГНСС (ха, уа, za) при ее установке на корабле определены с высокой точностью в связанной с кораблем системе координат GXYZ. Тогда, при наличии качки корабля, эти координаты непрерывно пересчитывают в местную систему координат OX1Y1Z1 и вычисляют вектор смещения Δ (δха, δуа, δza) измеряемых координат антенны относительно ее положения, которое она бы занимала при отсутствии качки по формуле:

Затем, вектор Δ(δxa, δуа, δza) в блоке компенсации качки 25 преобразуют в навигационную систему координат, например в систему прямоугольных координат связанную с Землей и с центром в центре Земли (ECEF) [14], в которой определяются координаты текущего положения антенны дополнительного приемника ГНСС 19. После этого вычисляют скорректированные координаты антенны, которые не содержат составляющих, обусловленных качкой корабля по формуле:

где  - скорректированные координаты корабельной антенны,
- скорректированные координаты корабельной антенны,  - измеренные дополнительным приемником ГНСС координаты антенны, T - символ транспонирования.
- измеренные дополнительным приемником ГНСС координаты антенны, T - символ транспонирования.
Затем, вектор  поступает в блок формирования относительных координат 18, где по формуле (2) вычисляются относительные координаты ЛА, которые затем поступают на вход дополнительного модуль отклонений от заданной траектории 19, в котором на основе использования стандартных для систем спутниковой посадки алгоритмов, например, как указано в [12] вычисляется вектор отклонений ECCH и далее используются аналогично тому, как описано в п. 1.
поступает в блок формирования относительных координат 18, где по формуле (2) вычисляются относительные координаты ЛА, которые затем поступают на вход дополнительного модуль отклонений от заданной траектории 19, в котором на основе использования стандартных для систем спутниковой посадки алгоритмов, например, как указано в [12] вычисляется вектор отклонений ECCH и далее используются аналогично тому, как описано в п. 1.
Одновременно, в модуле относительных координат дальномерных преемников 27, при размещении дальномерных приемников ДП 2 на корабле, также происходит компенсация качки корабля на основе уравнений, аналогичных (2-4), где вместо координат антенны приемника ГНСС 17 в уравнении (2) подставляют координаты антенн ДП 2 в связанной с кораблем системе координат GXYZ, а затем производят корректировку измеренных дальностей на величину смещений, обусловленных качкой корабля.
На фиг.4 представлена иллюстрация построения предлагаемой системы посадки при размещении ее на корабле. Показаны оси локальной системы координат с центром в точке посадки.
Таким образом, использование относительного режима навигации по ГНСС в предлагаемой системе позволяет решать задачи посадки ЛА с высокой точностью не только на стационарном аэродроме, но и при посадке на подвижную площадку (корабль), что является существенным отличием предлагаемой системы посадки по сравнению с прототипом. При этом канал передачи данных (поправок) на борт ЛА реализуется на основе двусторонней радиолинии управления посадкой 15.
Предложенная система отличается от систем-аналогов совмещением способов определения абсолютных и относительных координат и компенсацией качки корабля при их определении.
На фиг.5 представлена блок-схема системы посадки, с дополнительной функцией использования дальномерной системы для определения параметров качки, где введены дополнительный блок параметров качки 26, входом соединенный с выходом запросчика 1 и дальномерных приемников 3, а выходом с третьим входом модуля компенсации качки 25, выполненный с функцией комплексной обработки ее параметров, полученных из блока параметров качки 24 и дополнительного блока параметров качки 26.
Предложенная блок-схема реализует новую функцию определения параметров качки с использованием дальномерных приемников, аналогично тому, как определяется ориентация объектов в пространстве на основе измерения нескольких, например, трех дальностей до излучателя (бортового ответчика) [17, 19].
На фиг.6 представлена блок-схема построения системы посадки, где введен модуль комплексной обработки 27 координат, полученных по дальномерному и спутниковому способам. Первый вход модуля 27 соединен с выходом вычислителя координат 5, второй его вход соединен с выходом модуля относительных координат 20, а выход модуля 27 соединен с третьим входом модуля отклонений от заданной траектории 10.
В модуле 27 реализованный метод комплексной обработки информации (КОИ) выполнен по способу компенсации на основе оптимальной фильтрации ошибок двух устройств, измеряющих один и тот же навигационный параметр [15]. В данном случае комплексная обработка, применяется к показаниям двух подсистем - дальномерной и спутниковой. При этом, на первый вход модуля 27 поступают координаты ЛА, полученные в вычислителе координат дальномерным способом навигации (ДСН) в абсолютной системе координат - ХДСН, на второй вход поступают координаты ЛА с выхода модуля относительных координат 20, полученные на борту ЛА в абсолютной системе координат на основе спутникового способа навигации (ССН) - ХССН. Далее в модуле 27 осуществляется синхронизация поступающих измерений координат на один и тот же момент времени tn и вычисляется их разность dX(tn), поступающая на вход модуля отклонений от траектории.
Измеряемые параметры (координаты) в общем случае представляются в виде:


где  - истинные значения координат, nДСН(tn), nCCH(tn) - соответствующие ошибки измерений.
- истинные значения координат, nДСН(tn), nCCH(tn) - соответствующие ошибки измерений.
Разность измеряемых параметров не содержит истинных значений параметров  то есть является инвариантной к измеряемому параметру, и определяется только ошибками измерений.
то есть является инвариантной к измеряемому параметру, и определяется только ошибками измерений.

Прохождение сигнала dX(tn) через оптимальный фильтр, передаточная функция которого F(p) (где р - символ преобразования Лапласа) в наибольшей степени подавляет помеху (ошибку) nCCH(tn) и в минимальной степени искажает ошибку nДСН(tn), позволяет сформировать на выходе модуля 26 оценку ошибки измерений координат ЛА (при использовании ДСН), в виде:

где ε(tn) - остаточная погрешность.
Величина ε(tn) существенно меньше ошибок nCCH(tn) и nДСН(tп) [15], и тем меньше, чем больше различие в спектральных характеристиках рассматриваемых ошибок.
Оценка dXДСН(tn) используется в модуле 10 для коррекции координат ЛА, получаемую при использовании ДСН, в соответствии с выражением:

Уточненные значения координат ЛА в дальнейшем используются в блоке 10 при расчете отклонений ЛА от заданной траектории посадки - ЕДСН.
Рассмотрим характер поведения ошибок определения координат в ДСН при использовании двух ДП. В общем случае, для N ДП, известно [16], что среднеквадратическое значение погрешности определения местоположения σr ЛА при использовании ДСН и при одинаковых погрешностях измерений дальностей до ДП описывается приближенным выражением:

где α - угол под которым пересекаются линии положения в ДСН.
Из (10) видно, что погрешность ДСН сильно зависит от угла α, который при посадке на корабль определяется размером корабля, т.е. максимально возможным разнесением мест установки ДП. Если обозначить ширину корабля через Z (см. фиг.8), а расстояние от расчетной точки посадки (РТП) на посадочной палубе до ЛА через X, то угол α в (4) можно рассчитать по формуле:

Для большинства кораблей, на которые осуществляется посадка ЛА, ширина палубы не превышает 30 м, хотя для авианосцев может достигать 100 м. При этом, если ЛА находится вблизи точки посадки (например, на расстоянии около 200 м от РТП, то согласно (10) погрешность местоопределения σr составит приблизительно 94 м при σd=10 м. Однако для большинства высокоточных ДП погрешность σd достигает 100 м [16]. Тогда, минимальное значение погрешности местоопределения σr при использовании ДСН составит приблизительно 940 м на расстоянии 200 м от РТП, а на расстоянии около 400 м от РТП, согласно (6), достигнет приблизительно 1870 м, что неприемлемо для решения задач навигации и захода на посадку.
Погрешность σГНСС местоопределения ЛА с использованием ССН в общем случае описывается формулой [17]:

где Гф - геометрический фактор, являющийся мерой уменьшения точности навигационных определений из-за особенностей взаимного расположения ЛА и навигационных космических аппаратов (НКА); σd -среднеквадратическая погрешность определения линий положения (дальности).
Ввиду того, что в ГНСС используется созвездие из множества НКА, расположенных квазиравномерно по небесной полусфере, величина Гф обычно не более 2 [18], а погрешность горизонтальных координат не более 10-15 м. Для дифференциального или относительного режима ГНСС погрешность определения координат обычно не превышает 1 м [18] в любой точке околоземного пространства.
Тогда, при одновременном определении координат ЛА с использованием ДСН и ССН, и выполнении КОИ в модуле комплексной обработки измерений 26, а так же учитывая, что расстояния между антеннами корабельного приемника ГНСС и антеннами ДП известны с высокой точностью, погрешность расчета координат при использовании ССН не превысит величин  или около 2.5 м.
или около 2.5 м.
Таким образом, при одновременном определении дальностей от ЛА до ДП с использованием ГНСС (ССН) и дальномеров (ДСН) и выполнении в модуле 26 их комплексной обработки можно оценить текущую погрешность измерений дальностей, полученных от ДП, например, методом оптимальной фильтрации. Известно [19], что погрешность определения дальности в современных дальномерных системах не превышает +/-35 м. Тогда, при использование КОИ на основе метода компенсации и фильтрации ошибок [15] возможно оценить погрешность измерений дальности в ДСН с ошибкой, соответствующей ошибке ССН и использовать уточненные значения измерений дальности в ДСН при пропадании сигналов ГНСС (неработоспособности ССН).
Таким образом, использование системы посадки с модулем КОИ в соответствии с блок-схемой на фиг.5, позволит обеспечить продолжение посадки ЛА при пропадании данных от ГНСС и использовании ДСН с точностью, практически соответствующей точности ССН и удовлетворяющей требованиям системы посадки категории I и II.
На фиг.6 представлена блок-схема системы посадки, где в бортовую аппаратуру введен модуль запрета посадки 28, который используется для принятия решения о продолжении выполнения ЛА захода на посадку или об уходе на «второй круг».
В модуле 28 на основе формул (10) и (11) определяют критическую дальность Dкрит., на которой еще выполняются требования к точности определения отклонений от заданной траектории посадки для заданной категории системы посадки в соответствии с выражением:

где Z - расстояние между ДП (ширина корабля); σкат - необходимая точность определения координат ЛА или отклонений от глиссады, зависящая от категории системы посадки;  - погрешность измерений дальности при использовании ДСН или скорректированная с использованием ССН в алгоритме КОИ погрешность измерения дальности. После этого, проверяют условие:
- погрешность измерений дальности при использовании ДСН или скорректированная с использованием ССН в алгоритме КОИ погрешность измерения дальности. После этого, проверяют условие:

Например, в соответствии с (10), ошибка определения местоположения ЛА в случае его нахождении на удалении 800 м от корабля с шириной палубы 30 м при использовании ДСН и погрешностью измерения дальностей 35 м, составит около 1310 м. Это существенно превышает требования систем категорированной посадки: не более 10.5 м для посадки по категории I. При обработке данных в модуле комплексной обработки отклонений 28, полученных ДСН и ССН, погрешность местоположения ЛА составит приблизительно 1 м. Тогда, в соответствии с (13), критическая дальность Dкрит. для такого корабля (посадочной площадки) при использовании КОИ в соответствии с п. 3, составит 224 м, что соответствует требованиям категории I (не более 800 м) и категории II (не более 400 м).
Таким образом, использование модуля запрета посадки в предлагаемой системе посадки в соответствии с условием (14), позволяет повысить безопасность посадки путем прогнозирования минимальной дальности, до которой можно пользоваться системой и формирования запрета на выполнение посадки при снижении точности сигналов управления.
В случае распространения применимости системы для многих ЛА при их одновременном полете целесообразно использование стандартной аппаратуры зависимого наблюдения (АЗН), как это демонстрируется на фиг.8, где в качестве приемо-передающего наземного узла 7 и бортового приемопередающего узла 17 на данном и других ЛА используется аппаратура АЗН-В. Такое применение аппаратура АЗН-В позволяет передавать по каналу 1090 ES информацию о заданной траектории посадочной глиссады для ЛА, находящихся в рабочей области наземного (корабельного) передатчика аппаратуры АЗН-В. Учитывая рабочий диапазон системы АЗН-В (1090 МГц) и мощность стандартной аппаратуры (400 Вт) [20], можно утверждать, что рабочая область системы составит не менее 100-150 км от посадочной площадки (корабля). Принятая в бортовой аппаратуре АЗН-В посадочная информация может использоваться всеми ЛА, находящимися в рабочей области, для формирования траекторий захода на посадку и отклонений от глиссады при посадке. В этом случае появляется возможность отказаться от специализированной двусторонней радиолинии управления посадкой 15 или рассматривать ее в качестве резервного средства посадки.
В результате - использование аппаратуры АЗН-В в качестве приемопередатчиков дальномерной станции, дает возможность наблюдения на центральной станции 4 за всеми ЛА, находящимися в рабочей области, и позволяет существенно сократить объем дальномерного и бортового оборудования в системе посадки.
Таким образом, предложенная система посадки обладает новизной: содержит новые узлы, модули и связи между ними. Промышленная применимость предложенной системы подтверждена теоретически и экспериментально.
В системе посадки впервые применено:
- одновременное использование относительного (на основе ГНСС) и абсолютного (на основе радиодальномеров) режимов посадки для повышения точности и надежности посадки при пропадании сигналов ГНСС;
- универсальность, обеспечивающая посадку на корабли и другие мобильные площадки в относительном режиме с компенсацией качки;
- многофункциональность дальномерной системы, состоящая в дополнительной возможности определения качки с наибольшей точностью по сравнению с корабельными приборами;
- комплексная обработка данных дальномерной и спутниковой подсистем с оптимальной фильтрацией навигационных параметров;
- запрет на продолжение посадки при нарушении точности соответствующей категории посадки.
ЛИТЕРАТУРА
1. Патент РФ 2 489 325 МПК: G01S 1/16, B64D 45/04, заявл. 30.08.2011, опубл. 10.08.2013, Бюл. №22.
2. Патент США US7474962(B2) МПК: G01C 21/00; G01S 19/44, заявл. 13.07.2005, опубл. 01.06.2009.
3. Патент РФ 2 386 176 МПК: G08G 5/02, опубл. 10.04.2010, Бюл. №10.
4. Патент РФ 2 478 979 МПК: G01S 5/14, опубл. 10.04.2013, Бюл. №10.
5. Патент РФ 2 757 804 МПК: G08G 5/02, Н04В 7/26, опубл. 21.10.2021 Бюл. №30.
6. Патент РФ 113 243 МПК: B64F 1/18, опубл. 10.02.2012, Бюл. №4.
7. Патент РФ 2 695 029 МПК: B64F 1/18 (2006.01), опубл. 18.07.2019, Бюл. №20.
8. Патент РФ 2 152 078 МПК: G08G 7/00, G01C 23/00, опубл. 27.06.2000, Бюл. №18.
9. Патент РФ 2 734 173 МПК: B64D 45/04, B64F 1/18, G01C 23/00, G08F 5/002, опубл. 13.10.2020, Бюл. №29.
10. Патент РФ 2 717 284 МПК: G08G 5/02, B64D 45/04, G01S 1/16 (2006.01), опубл. 22.04.2019, Бюл. №25.
11. Борисов Р.В., Семенова В.Ю. Качка корабля. - Учебное пособие: Санкт-Петербургский Государственный морской технический университет, Санкт-Петербург, 2006. - 90 с.
12. Бортовое оборудование ГНСС/ЛККС. Квалификационные требования. КТ-253 / АР МАК, Москва, 2010.
13. Посадка беспилотных летательных аппаратов на суда: проблемы и решения / под общей редакцией доктора технических наук, профессора С.Н. Шарова. - СПб: Судостроение, 2014. - 192 с.
14. Методы определения навигационных параметров подвижных средств с использованием спутниковой радионавигационной системы ГЛОНАСС: монография / В.Н. Тяпкин, Е.Н. Гарин. - Красноярск: Сиб. федер. ун-т, 2012. - 260 с.
15. Ярлыков М.С. Статистическая теория радионавигации. - М.: Радио и связь, 1985. - 344 с.
16. Радиотехнические системы: учебник для студ. высш. учеб. заведений / [Ю.М. Казаринов и др.]; под ред. Ю.М. Казаринова. - М.: Издательский центр «Академия», 2008. - 592 с.
17. Шебшаевич B.C., Дмитриев П.П., Иванцевич Н.В. и др. Сетевые спутниковые радионавигационные системы. 2-е изд., перер. и доп.М.: Радио и связь, 1993. 415 с.
18. Соловьев Ю.А. Спутниковая навигация и ее приложения. - М.: Эко-Трендз, 2003.-326 с.
19. Авиационная радионавигация: Справочник. / под ред. А.А. Сосновского. М.: Транспорт, 1990. 264 с.
20. Приложение 10 к Конвенции о международной гражданской авиации. Авиационная электросвязь. Системы наблюдения и предупреждения столкновений Том IV / Изд. четвертое, Июль 2007 г.
Расшифровка обозначений
1. запросчик
2. дальномерная станция
3. дальномерный приемник
4. центральная станция
5. вычислитель координат
6. электронная вычислительная машина (ЭВМ)
7. наземный приемо-передающий узел
8. база данных взлетно-посадочной полосы (ВПП)
9. сигнальная линия связи
10. модуль отклонений от заданной траектории
11. модуль сигналов управления
12. бортовой приемник ГНСС
13. высотомер
14. бортовой ответчик
15. радиолиния «запрос-ответ»
16. бортовая аппаратура управления
17. бортовой приемо-передающий узел
18. двусторонняя радиолиния управления посадкой
19. дополнительный приемник ГНСС
20. модуль относительных координат
21. дополнительный модуль отклонений от заданной траектории
22. выделитель сигналов
23. блок определения высоты
24. блок параметров качки
25. модуль компенсации качки
26. дополнительный блок параметров качки
27. модуль комплексной обработки
28. бортовой выделитель сигналов
29. модуль запрета посадки
Перечень сокращений
АЗН Автоматическое зависимое наблюдение
АЗН-В Автоматического зависимого наблюдения вещательного режима
БП Бортовой приемник
ВС Воздушное судно
ГНСС Глобальная навигационная спутниковая система
ДП Дальномерный приемник
ДС Дальномерная станция
ДСН Дальномерный способ навигации
КОИ Комплексная обработка информации
ЛА Летательный аппарат
НКА Навигационный космический аппарат
НП Наземный приемник
ССН Спутниковый способ навигации
ЦС Центральная станция
ЭВМ Электронная вычислительная машина
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционная система посадки летательных аппаратов | 2019 |
|
RU2717284C2 |
| Многопозиционная система посадки воздушных судов | 2015 |
|
RU2608183C1 |
| МНОГОПОЗИЦИОННАЯ СИСТЕМА ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2489325C2 |
| СПОСОБ НАВИГАЦИИ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ РАДИОТЕХНИЧЕСКОЙ ДАЛЬНОМЕРНОЙ СИСТЕМЫ | 2020 |
|
RU2770311C2 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ КОМПЛЕКС ИССЛЕДОВАНИЯ ПОСАДОЧНЫХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ | 1991 |
|
RU2042583C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| ДАЛЬНОМЕРНАЯ РАДИОТЕХНИЧЕСКАЯ СИСТЕМА БЛИЖНЕЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2478979C1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| Система мониторинга координат спускаемых космических объектов или их аппаратов в атмосфере Земли и их диспетчерского контроля | 2017 |
|
RU2659376C1 |

Система посадки летательных аппаратов (ЛА) содержит наземную и бортовую аппаратуру. Наземная аппаратура включает запросчик (1), дальномерные станции (2) с дальномерными приемниками (3), центральную станцию (4). Центральная станция (4) содержит вычислитель координат (5), ЭВМ (6), приемо-передающий узел (7), базу данных взлетно-посадочной полосы (ВПП) (8). В ЭВМ (6) сформированы модуль отклонения от заданной траектории (10), модуль сигналов управления (11), приемник глобальной спутниковой навигационной системы (ГНСС) (19), модуль относительных координат (20), модуль отклонения от заданной траектории (21), выделитель сигналов (22). Бортовая аппаратура содержит бортовой приемник сигналов ГНСС (12), высотомер (13), бортовой ответчик (14), бортовую аппаратуру управления (16), приемо-передающий узел (17), блок определения высоты (23), при этом бортовая аппаратура связана с наземной и центральной станцией двухсторонними линиями связи (15,18). Для посадки на палубу корабля дополнительно предусмотрены блоки параметров качки (24,26) и модуль компенсации качки (25). Обеспечивается повышение точности и надежности посадки ЛА. 5 з.п. ф-лы, 9 ил.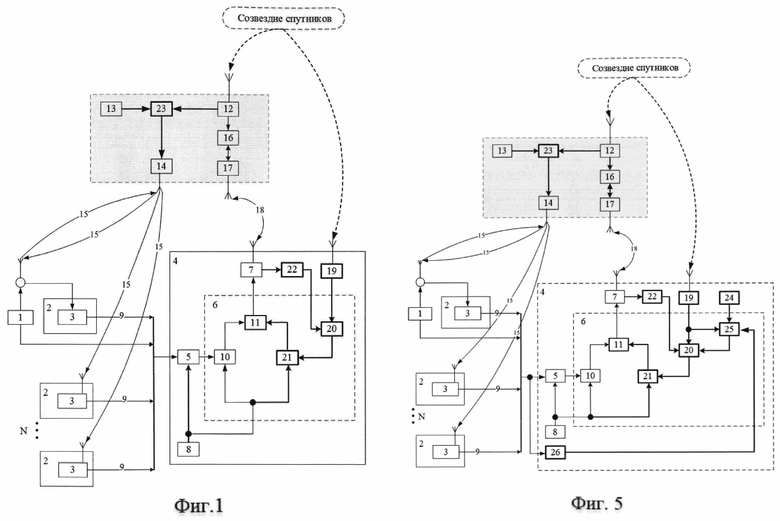
1. Система посадки летательных аппаратов (ЛА), обеспечивающая дальномерный и спутниковый способы определения координат ЛА, содержащая наземную и бортовую аппаратуру, при этом наземная аппаратура включает запросчик, в общем случае N дальномерных станций с дальномерными приемниками, центральную станцию с вычислителем координат, электронной вычислительной машиной (ЭВМ), наземным приемо-передающим узлом, базой данных взлетно-посадочной полосы (ВПП), при этом выходы запросчика и дальномерных приемников через сигнальные линии связи соединены со входом вычислителя координат, дополнительный вход которого соединен с выходом базы данных ВПП, в ЭВМ сформированы модуль отклонений от заданной траектории и модуль сигналов управления, при этом первый вход модуля отклонений от заданной траектории соединен с выходом вычислителя координат, второй его вход соединен с выходом базы данных ВПП, а выход соединен с входом модуля сигналов управления, вход/выход которого связан со входом/выходом наземного приемопередающего узла, бортовая аппаратура включает бортовой приемник сигналов глобальной навигационной спутниковой системы (ГНСС) с приемной антенной на входе и первым и вторым выходами, высотомер, бортовой ответчик, выход которого соединен через радиолинию «запрос-ответ» с запросчиком и дальномерными приемниками, бортовую аппаратуру управления, вход/выход которой через бортовой приемо-передающий узел и двустороннюю линию управления посадкой связан с входом/выходом наземного приемо-передающего узла, отличающаяся тем, что в наземную аппаратуру введены дополнительный приемник ГНСС, модуль относительных координат, дополнительный модуль отклонений от заданной траектории, выделитель сигналов, при этом выход дополнительного приемника ГНСС соединен с первым входом модуля относительных координат, второй вход которого соединен через выделитель сигналов с наземным приемо-передающим узлом, выход модуля относительных координат подключен к первому входу дополнительного модуля отклонений от заданной траектории, второй вход которого соединен с выходом базы данных ВПП, а выход подключен к дополнительному входу модуля сигналов управления, причем модуль сигналов управления выполнен с функцией распознавания сигналов с наименьшей ошибкой определения отклонения от заданной траектории, в бортовую аппаратуру введен блок определения высоты, первый вход которого соединен с высотомером, второй вход подключен к первому выходу бортового приемника ГНСС, второй выход которого соединен со входом бортовой аппаратуры управления, при этом блок определения высоты выполнен с возможностью оптимальной обработки поступающих значений высоты.
2. Система посадки по п. 1, отличающаяся тем, что при посадке ЛА на корабли и другие мобильные площадки на них размещены дальномерные станции и центральная станция, а база данных ВПП содержит координаты дальномерных станций и ВПП в локальной системе координат с центром, например, в точке посадки на ВПП, введены блок параметров качки и модуль компенсации качки, при этом выход блока параметров качки соединен с первым входом модуля компенсации качки, второй вход которого подключен к выходу дополнительного приемника ГНСС, выход модуля компенсации качки подключен к третьему входу модуля относительных координат.
3. Система посадки по п. 2, отличающаяся тем, что введен дополнительный блок параметров качки, определение которых выполняется путем регистрации углов наклона антенн дальномерных приемников при возникновении качки, а модуль компенсации качки выполнен с функцией комплексной обработки ее параметров, полученных из блока параметров качки и дополнительного блока параметров качки, при этом дополнительный блок параметров качки входом соединен с выходами запросчика и дальномерных приемников, а выходом с третьим входом модуля компенсации качки.
4. Система посадки по п. 1 или 2, отличающаяся тем, что введен модуль комплексной обработки, первый вход которого соединен с выходом вычислителя координат, второй вход которого соединен с выходом модуля относительных координат, а выход подключен к третьему входу модуля отклонений от заданной траектории, причем комплексная обработка координат выполняется, например, по способу оптимальной фильтрации двух навигационных измерений одного и того же параметра.
5. Система посадки по п. 1 или 2, отличающаяся тем, что в бортовую аппаратуру введены бортовой выделитель сигналов и модуль запрета посадки, вход которого соединен с выходом бортового выделителя сигналов, соединенного по входу с дополнительным выходом бортового приемопередающего узла, а выход модуля запрета посадки соединен с дополнительным входом бортовой аппаратурой управления, в которой сигнал с модуля запрета посадки используется для принятия решения о продолжении выполнения ЛА захода на посадку или об уходе на «второй круг» в соответствии с условием:

где Dкат - минимальная дальность до расчетной точки посадки ЛА, зависящая от категории системы посадки;
Dкрит. - критическая дальность, на которой выполняются требования к точности определения координат для заданной категории системы посадки, определяемая в соответствии с выражением:
где Z - расстояние между дальномерными приемниками (ширина корабля); σкат - необходимая точность определения координат ЛА, зависящая от категории системы посадки;  - погрешность измерения дальности до ЛА на центральной станции.
- погрешность измерения дальности до ЛА на центральной станции.
6. Система посадки по п. 1 или 2, отличающаяся тем, что при посадке нескольких ЛА двусторонняя радиолиния управления посадкой выполняется путем использования в качестве приемо-передающего узла системы автоматического зависимого наблюдения вещательного режима (АЗН-В), а в качестве бортового приемо-передающего узла на данном и других ЛА путем использования бортовой аппаратуры АЗН-В.
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2510518C1 |
| СИСТЕМЫ И СПОСОБЫ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2722778C2 |
| СПОСОБ НАВИГАЦИИ ОБЪЕКТА С ИСПОЛЬЗОВАНИЕМ РАДИОТЕХНИЧЕСКОЙ ДАЛЬНОМЕРНОЙ СИСТЕМЫ | 2020 |
|
RU2770311C2 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2536768C1 |
| US 5506588 A1, 09.04.1996. | |||

