Изобретение относится к точному приборостроению и может быть использовано в любых навигационных системах, содержащих датчики первичной навигационной информации.
Известен способ определения коэффициентов модели погрешностей, основанный на равномерном вращении блока ЧЭ в плоскостях, содержащих компоненты вектора ускорения силы тяжести, измерении ускорения акселерометрами в дискретные моменты времени, вычислении коэффициентов.
Наиболее близким к предлагаемому является способ, основанный на осуществлении последовательности разворотов блока ЧЭ в требуемые фиксированные положения, измерении ускорения акселерометрами в этих положениях, вычислении значений коэффициентов модели погрешностей.
Однако для определения коэффициентов модели необходимо совершать разворот блока ЧЭ в n фиксированных положений (n ≥5), что требует достаточно большого времени на определение коэффициентов (t  60 мин).
60 мин).
Целью изобретения является сокращение времени на выполнение операции определения коэффициентов.
Цель достигается тем, что в предлагаемом способе осуществляются равномерное перемещение блока ЧЭ из одного фиксированного положения в другое, измерение действующих на блок ЧЭ значений ускорений и угловых скоростей в дискретные моменты времени, умножение измеренных значений ускорений и угловых скоростей самих на себя и друг на друга для получения квадратов, кубов.
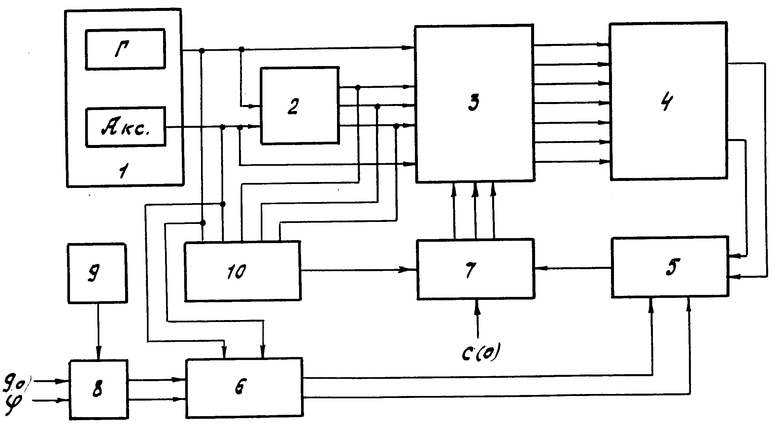
На чертеже представлена функциональная схема устройства, поясняющего предлагаемый способ на примере использования в блоке ЧЭ одного акселерометра и одного гироскопа.
Устройство содержит блок 1 ЧЭ навигационной системы, выходы которого соединены с входами первого 2 и второго 3 блоков умножения, выходы первого блока 2 умножения соединены с входами второго блока 3 умножения, а выходы блока 3 соединены с входами первого сумматора 4, выходы которого соединены с первыми входами второго сумматора 5, вторые входы которого соединены с выходами блока 6 вычитания, а выходы с одними входами блока 7 вычисления коэффициентов, выходы которого соединены с вторыми входами второго блока 3 умножения, первые входы блока 6 вычитания соединены с выходами блока 1 ЧЭ, а вторые с выходами блока 8 вычисления независимых ускорений и угловых скоростей, вход которого соединен с выходом измерителя 9 угла поворота, блока 1 чувствительных элементов, вторые входы блока 7 соединены с выходами блока 10 хранения, входы которого соединены с выходами блока 1 ЧЭ и блока 2 умножения.
Устройство работает следующим образом.
Выполнение операций по определению коэффициентов модели погрешностей осуществляется в точке с известными g и широтой ϕ
Гиростабилизированная платформа с блоком ЧЭ или блок ЧЭ бесплатформенной навигационной системы на специальном поворотном столе совершает разворот из одного фиксированного положения в другое. В процессе осуществления равномерного перемещения блока 1 ЧЭ в дискретные моменты времени измеряют значения ускорений Wх и угловых скоростей ωx которые затем поступают на входы первого 2 и второго 3 блоков умножения и на входы блока 6 вычитания и блока 10 хранения. В блоке 2 умножения происходит умножение значений ускорений Wх и угловых скоростей ωxcамих на себя (и друг на друга при работе с тремя акселерометрами и гироскопами для получения квадратов, кубов и перекрестных значений ускорений и угловых скоростей) в соответствии с принятой моделью погрешностей Wх2, Wх3, ωx2 (для трех акселерометров и гироскопов WхWy, WхWz, WyWz, Wх2, Wх3 и т.д. в зависимости от принятой модели погрешностей).
Полученные произведения ускорений и угловых скоростей поступают на входы блока 10 хранения и во второй блок 3 умножения, в котором происходит умножение полученных значений ускорений, угловых скоростей и их произведений на коэффициенты модели погрешностей, полученные на предыдущем шаге в блоке 7 вычисления коэффициентов. В этом блоке вычисление коэффициентов осуществляется на основе градиентных процедур. Полученные в блоке 3 значения произведений
С1Wх, С2Wх2, С3Wх2,
С4 ωx C5 ωx2 С6Wх, С7 ωx поступают в первый сумматор 4, где происходит суммирование значений произведений в соответствии с принятой моделью погрешностей и получение суммарных значений погрешностей для акселерометров и гироскопов
Z  =
=
Полученная суммарная погрешность поступает на первый вход второго сумматора 5, на второй вход которого поступают независимо вычисленные значения суммарных погрешностей гироскопов и акселерометров.
Вычисление этих суммарных погрешностей выполняется следующим образом. При равномерном перемещении платформы из одного фиксированного положения в другое измеряют углы поворота платформы в каждый дискретный момент времени, вычисляют в эти моменты времени независимые значения угловой скорости и ускорения ωxн и Wxн, причем, вычисляя ωxн, учитывают и угловую скорость вращения Земли на данной широте и при данном наклоне блока 1 ЧЭ и скорость вращения самой платформы, которую нетрудно найти, зная угол поворота и время, затрачиваемое на это, а Wхн= go sin α где α угол наклона измерительной оси акселерометра. Операции вычисления выполняются в блоке 8 вычисления независимых ускорений и угловых скоростей, на входы которого поступает значение угла наклона платформы с блока 1 ЧЭ и с измерителя 9 угла поворота, а также эталонные значения g и ϕ. Полученные значения ωxн и W хнпоступают в блок 6 вычитания, на входы которого поступают ωx и Wх c выходов гироскопов и акселерометров блока 1 ЧЭ. На выходе блока 6 формируются независимые значения суммарных погрешностей ZН=  =
= -
- которые поступают на вторые входы второго сумматора 5, на выходе которого получаются значения ошибок ε как разность суммарных погрешностей
которые поступают на вторые входы второго сумматора 5, на выходе которого получаются значения ошибок ε как разность суммарных погрешностей
ε Z Zн.
Эти значения поступают в блок 7 вычисления коэффициентов модели погрешностей, где, используя известные градиентные процедуры, осуществляется вычисление на каждом такте новых уточненных значений коэффициентов модели и использование их в блоке 3, при этом для организации градиентной процедуры вычисления коэффициентов на вторые входы блока 7 поступают значения ускорений, угловых скоростей и их произведений из блока 10 хранения, получаемые на каждом такте опроса с выхода блока 1 ЧЭ (с гироскопов и акселерометров) и блока 2 (произведения самих на себя и друг на друга значения квадратов, кубов ускорений и угловых скоростей, перекрестные значения). Цикл уточнения коэффициента модели повторяется n раз, где n число дискретных моментов времени опроса блока 1 ЧЭ.
В основу предлагаемого способа определения коэффициентов модели погрешностей положены следующие соображения. Случайные составляющие погрешностей датчиков первичной навигационной информации (гироскопов и акселерометров) можно представить в виде ряда, нелинейно зависящего от ускорений и угловых скоростей и линейно зависящего от коэффициентов. Например, модель погрешностей ДПНИ, представленная в виде такого ряда, может быть описана следующим образом (для одного гироскопа и акселерометра).
δWх K1Wх + K2Wx2 + K3Wx3 + K4Wу + K5WхWy + K6 ωx+ K7 ωx2)
δωx= K1Wy K2Wx + K3WxWy + K4ωx (1)
В ряде случаев предполагается, что коэффициенты модели постоянны, т.е. их можно определить один раз и далее считать неизменными. Однако это характерно для систем навигации, работающих одну или несколько десятков минут. Для навигационных систем, работающих в течение нескольких часов в большом диапазоне угловых скоростей и ускорений, что особенно характерно для бесплатформенных систем навигации, установленных на высокодинамичных, маневренных объектах, например самолетах, считать коэффициенты неизменными нельзя. Они являются функцией ускорений, угловых скоростей, изменения температуры внутри ДПНИ. Поэтому необходимо периодически уточнять коэффициенты модели погрешностей (1).
Структура процесса формирования оценки погрешности вида (1) на выходе ДПНИ может быть представлена на (K+1) шаге в виде (k+1) H(k+1)
(k+1) H(k+1) (k+1), (2) где
(k+1), (2) где  (k+1)= [δWx; δωx] cуммарная погрешность ДПНИ, полученная на входе принятой модели погрешностей (для одного гироскопа и акселерометра).
(k+1)= [δWx; δωx] cуммарная погрешность ДПНИ, полученная на входе принятой модели погрешностей (для одного гироскопа и акселерометра).
 (k+1)=[C
(k+1)=[C ; C
; C ] где CWx [K1K2K3K4K5K6K7]
] где CWx [K1K2K3K4K5K6K7]
С ωx [K1K2K3K4] вектор коэффициентов принятой модели погрешностей (количество элементов вектора зависит от вида принятой модели погрешностей;
Н(К+1) матрица наблюдений, составленная из ускорений, угловых скоростей и их произведений самих на себя и друг на друга соответственно.
H(k+1) 












Представление (2) позволяет построить модель линейную по оцениваемым коэффициентам. Однако в этом случае матрица наблюдений меняется на каждом такте оценки коэффициентов.
Подстройку коэффициентов С(К+1) можно выполнить, применяя достаточно простые градиентные процедуры, основанные на задании среднеквадратической функции потерь вида
M[ε2(k)] [ )]2, (3) где
)]2, (3) где  (k) выражение (2), полученное на выходе модели погрешностей;
(k) выражение (2), полученное на выходе модели погрешностей;
Z(k) суммарная погрешность, полученная независимым путем по данным, определенным с высокой точностью в месте проведения операции по уточнению коэффициентов калибровки (с известными g и ϕ).
Функция (3), представляющая собой дисперсию на выходе модели, описывающей погрешности ДПНИ, может быть представлена в следующем виде:
М[ ε2(k)] M[Z(k) H(k)C(k)]2 (4)
Она минимизируется относительно коэффициентов С(k). Оптимальный вектор коэффициентов может быть определен как путем решения уравнения Винера-Хопфа, так и используя МНК. Однако особенность навигационной системы в том, что невозможно получить ансамбль реализации для вычисления дисперсии, приходится работать с единичной реализацией, получаемой на выходе блока ЧЭ. В этом случае для уточнения коэффициентов целесообразно использовать алгоритм Impoy дл мгновенного значения дисперсии (3)
C(k+1) C(k) + 2 μНT(k)ε (k), (5) где μ коэффициент сходимости, определяющий устойчивость и скорость адаптации, подбирается обычно экспериментально.
Величина ε (k) в выражении (5) есть разность [z(k)- (k)] Найти значение Z(k) можно следующим образом.
(k)] Найти значение Z(k) можно следующим образом.
Одновременно с измерением в дискретные моменты времени значений ускорений и угловых скоростей с ДПНИ Wх и ωx осуществляется измерение величины угла разворота платформы с помощью измерителя угла поворота (датчика угла на оси вращения блока ЧЭ или внешнего измерителя) за период дискретности (опроса ДПНИ). Определяется истинное отклонение оси чувствительности акселерометра от вертикали места калибровки и находится независимое значение ускорения в дискретные моменты времени
WxН go.sin α где α угол отклонения оси чувствительности от вертикали места. Одновременно определяется угловая скорость перемещения платформы с блоком ЧЭ, которая суммируется с угловой скоростью вращения Земли в точке калибровки (для известного ϕ ) ωxн. Разность -
- =
= = z(k) (6) есть независимая суммарная погрешность навигационной системы. Отсюда величина ε (k) имеет вид
= z(k) (6) есть независимая суммарная погрешность навигационной системы. Отсюда величина ε (k) имеет вид
ε(k) z(k)- (k).
(k).
Cравнение результатов определения коэффициентов модели погрешностей с использованием для вычисления коэффициентов простых градиентных процедур и способа, взятого за прототип, показало, что в предлагаемом способе достигается та же точность оценивания коэффициентов, что в способе-прототипе, но за время, равное 1-2 мин (в прототипе ≈ 60 мин).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 1991 |
|
RU2006868C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2014563C1 |
| Способ автономной ориентации подвижного объекта с помощью инерциального измерительного модуля | 2019 |
|
RU2738342C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИИ | 2012 |
|
RU2504734C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА И БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2017 |
|
RU2661446C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2589495C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ ОБЪЕКТОВ, ДВИЖУЩИХСЯ ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ С ВРАЩЕНИЕМ ВОКРУГ ПРОДОЛЬНОЙ ОСИ | 2008 |
|
RU2375680C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ВЕДОМОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ ЭТАЛОННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2505785C1 |
Использование: в точном приборостроении, в любых навигационных системах, содержащих датчики первичной навигационной информации. Сущность изобретения: с целью сокращения времени на выполнение операции определения коэффициентов равномерно перемещают блок ЧЭ из одного фиксированного положения в другое, измеряют в промежутке между этими положениями n значения ускорений и угловых скоростей как с помощью блока ЧЭ, так и независимым путем, умножают измеренные с блока ЧЭ значения ускорений и угловых скоростей самих на себя и друг на друга для получения квадратов и кубов ускорений и их перекрестных значений в соответствии с принятой моделью погрешностей, умножают полученные значения ускорений, угловых скоростей и их произведений на коэффициенты модели погрешностей, формируют суммарную погрешность модели, вычисляют независимые суммарные погрешности, находят разность этих погрешностей и используют ее для вычисления новых значений коэффициентов. 1 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ МОДЕЛИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ НАВИГАЦИОННОЙ СИСТЕМЫ, основанный на вычислении значений коэффициентов, отличающийся тем, что коррекцию значений коэффициентов осуществляют путем равномерного перемещения блока чувствительных элементов из одного фиксированного положения в другое, одновременно осуществляя измерение действующих на блок чувствительных элементов значений ускорений и угловых скоростей в дискретные моменты времени, умножение измеренных значений ускорений и угловых скоростей самих на себя и друг на друга в соответствии с принятой моделью погрешностей, умножение полученных значений ускорений, угловых скоростей и их произведений на коэффициенты модели погрешностей, суммирование полученных произведений в соответствии с принятой моделью погрешностей, измерение углов поворота блока чувствительных элементов, вычисление в каждый дискретный момент времени независимых значений угловой скорости и ускорения по измерительным осям, вычисление независимых суммарных погрешностей навигационной системы путем вычитания из значений ускорений и угловых скоростей, полученных с блока чувствительных элементов, значений ускорений и угловых скоростей, полученных независимым путем, вычитание вычисленных независимых суммарных погрешностей из значений погрешностей, полученных в соответствии с принятой моделью погрешностей, вычисление новых значений коэффициентов.
| Адаптивные фильтры | |||
| /Под ред | |||
| К | |||
| Ф | |||
| Н | |||
| Кауэна | |||
| М.: Мир, 1989, с.60-65. |
