Изобретение относится к области приборостроения и может быть использовано в навигационных приборах, в том числе, с комплектированным алгоритмом работы, для определения координат подвижных объектов в условиях геомагнитных аномалий, естественных атмосферных, имитационных, заградительных и электромагнитных помех, а также при отсутствии или неустойчивом приеме сигналов спутниковых радионавигационных систем.
Известен способ комплексирования инерциальных навигационных систем и комплексированная навигационная система по патенту [1]. В способе используется инерциальная навигационная системы с коррекцией от приемника спутниковой навигационной системы по корректирующим сигналам, сформированным фильтром коррекции по разности скоростей инерциальной навигационной системы и датчика базовой скорости, а также по разности сигналов с горизонтальных акселерометров, преобразованных интегратором и датчиком базовой скорости. Устройство состоит из автономной инерциальной навигационной системы, приемника спутниковой навигационной системы, сумматора, фильтров коррекции, интеграторов и фильтров управления. Указанные способ и устройство весьма сложны в реализации, причем устройство имеет большие габариты и потребляемую мощность, вследствие чего широкое применение их ограничено для использования в подвижных объектах, при определении координат местоположения.
Известен способ определения местоположения подвижных объектов и устройство для его реализации по патенту [2]. В способе проводятся измерения горизонтальных проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта. В каждом рабочем цикле измеряют усредненные значения проекций суммарного вектора напряженности и ускорения силы тяжести на оси приборной системы координат. По значениям горизонтальных проекций вектора напряженности магнитного поля, с учетом приращения пути и поправки направления, определяют приращения координат и угол направления движения. С учетом координат исходной точки определяют координаты объекта. Устройство содержит датчики магнитного поля, датчики вертикали, блок расчета горизонтальных проекций магнитного поля, блок управления, датчик перемещения и навигационный блок. Навигационный блок содержит блок расчета приращения координат, блок расчета угла и сумматор. Способ и устройство относится к автономным навигационным системам магнитного типа, использующим магнитное поле Земли для определения направления движения и одометрическую систему счисления пути.
Недостатками указанного способа и устройства является низкая точность измерения координат и угла направления движения, а также сложность их использования. Это обусловлено ошибками определения координат в автономных навигационных системах магнитного типа. При этом ошибки, в зависимости от величины пройденного пути, с течением времени возрастают, что требует периодической коррекции определяемых координат с использованием топографических карт, информации об известных координатах и.т.д. Точность известного способа и устройства снижается в условиях воздействий внешних паразитных полей, от линий электропередач, в зонах магнитных аномалий. Вводимые поправки направления движения зависят от магнитного склонения, сближения меридианов в данной местности и рассогласования измерительной оси датчика продольной оси подвижного объекта.
На подвижных системах используются одометрические системы счисления пути, основанные на подсчете числа оборотов колеса или привода гусеницы. Коэффициент пути, определяющий пересчет числа оборотов в пройденном пути, зависит от состояния ходовой части: типа шин, давления в них и т.п., а также от характера местности. Все это усложняет использование известного способа и устройства и ограничивает область их применения, а геомагнитные датчики вносят большие погрешности при определении дирекционного угла, т.к. находясь в какой-либо местности, нужно учитывать действующее магнитное склонение конкретно для данного участка местности.
Известен способ инерциальной навигации и устройство для его осуществления по патенту [3]. Способ инерциальной навигации заключается в использовании линейных акселерометров, работающих в режиме автоколебаний, пропорциональных ускорению и периоду автоколебаний. Одновременно с ускорением объекта измеряют, интервал времени, в течение которого измеряют ускорение, при помощи показаний акселерометра определяют составляющие вектора скорости и радиус-вектора по направлению оси чувствительности акселерометров на этом интервале. Значения показаний акселерометра за каждый период автоколебаний перемножают, а результаты для конкретного участка траектории суммируют.
Недостатками указанного способа и устройства является низкая точность измерения интервалов времени, т.к нет синхронизации с единым временем, что значительно снижает точность в расчете координат.
Наиболее близкими по технической сущности к предлагаемым является способ определения местоположения подвижных объектов и устройство для его реализации, описанные в патенте [4], принятые за прототип.
Способ-прототип заключается в следующем:
1) в калибровочном цикле осуществляют разворот подвижного объекта из начальной точки на 270 градусов через фиксированные положения 0,90,180 и 270 градусов и в каждом определяют значения горизонтальных проекций вектора напряженности магнитного поля;
2) по контрольным значениям горизонтальных проекций определяют коэффициенты коррекции;
3) в каждом рабочем цикле измеряют усредненные значения проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта на оси приборной системы координат, а также ускорения силы тяжести;
4) по измеренным значениям проекций, с учетом коэффициентов коррекции, определяют значения горизонтальных проекций векторов напряженности магнитного поля на оси горизонтальной системы координат объекта;
5) по значениям горизонтальных проекций магнитного поля определяют угол направления движения и приращение координат за время рабочего цикла;
6) определяют координаты объекта суммированием относительных координат и координат исходной точки;
7) с учетом координат исходной точки определяют координаты подвижного объекта;
8) с помощью спутниковых радионавигационных систем (СРНС) измеряют координаты объекта, с учетом которых проводят коррекцию относительных координат и координат начальной точки с помощью датчика базовой скорости.
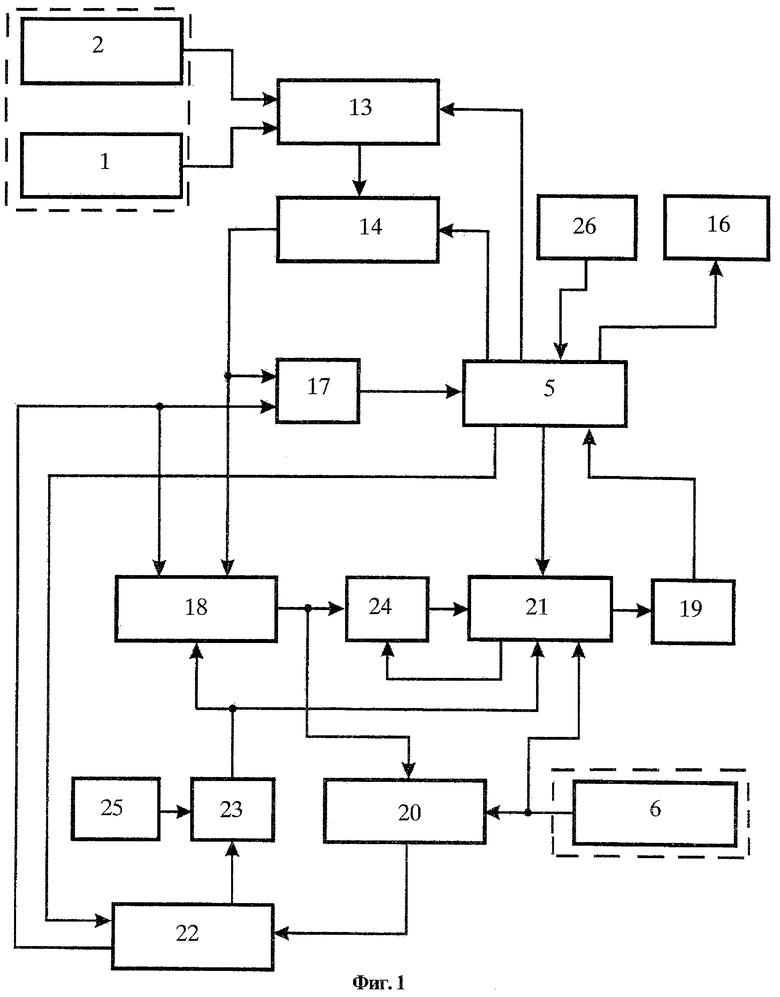
Устройство-прототип, функциональная схема которого приведена на фиг.1, содержит блок датчиков магнитного поля 2, блок датчиков линейного ускорения 1, блок преобразования и усреднения 13, блок расчета горизонтальных проекций магнитного поля 14, блок управления 15, приемник спутниковых радионавигационных систем (СРНС) 6, блок расчета угла 17, первый блок расчета приращения координат 18, первый сумматор 19, второй блок расчета приращения координат 20, блок коррекции 21, блок расчета корректирующих коэффициентов 22, блок умножения 23, второй сумматор 24, датчик перемещения 25, пульт управления 26, блок индикации 16.
Работа устройства-прототипа основана на комплексной обработке информации, поступающей от автономной навигационной системы магнитного типа и приемника СРНС, входящего в состав устройства.
Недостатками известного способа и устройства является низкая скорость калибровки в рабочем режиме, при движении подвижного объекта. Кроме того, величина магнитного склонения задается константой и учитывается лишь для отдельной местности, а также при движении с учетом рельефа местности отсутствует перевод величины пройденного пути в проекцию, что приводит с течением времени к быстрому накоплению среднеквадратической ошибки при определении координат.
Точность известного способа и устройства снижается также в условиях воздействия внешних паразитных полей от линий электропередач, в зонах магнитных аномалий, влияния магнитных полей соседних объектов и магнитного поля самого объекта, магнитного склонения для отдельной местности, внешних направленных магнитных и электромагнитных факторов воздействия. Также, недостатком известного способа и устройства является низкая функциональная и параметрическая надежность.
Задача, на решение которой направлено заявляемое изобретение, заключается в создании способа определения местоположения подвижных объектов и комплексированной навигационной системы, использующей магнитную и гироскопическую систему угловой ориентации, с повышенной точностью и достоверностью измерительных характеристик движения и повышенной функциональной и параметрической надежностью в зонах с непредсказуемыми аномальными характеристиками.
Технический результат, который может быть получен при осуществлении предлагаемого способа и системы, заключается в повышении точности определения координат и измерения угловой ориентации подвижного объекта, повышении оперативности и упрощении калибровки в рабочем режиме, а также в повышении характеристик надежности.
Для решения поставленной задачи в способе определения местоположения подвижных объектов, включающем измерение в калибровочном цикле с использованием геомагнитной системы угловой ориентации контрольных значений горизонтальных проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта, измерение усредненных за время рабочего цикла значений проекций ускорения силы тяжести, проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта на оси приборной системы координат, по которым с учетом коэффициентов коррекции, полученных в калибровочном цикле, производят определение значений горизонтальных проекций вектора напряженности магнитного поля Земли на оси горизонтальной системы координат объекта, по которым производят определение угла направления движения, и с учетом приращения пути производят определение приращения координат за время рабочего цикла, по которым с учетом координат начальной точки производят определение координат объекта; кроме того, включающем измерение с помощью спутниковых радионавигационных систем (СРНС) координат объекта, по которым в каждом рабочем цикле производят коррекцию относительных координат и координат исходной точки объекта, согласно изобретению в калибровочном цикле формируют оси гироскопической системы угловой ориентации в виде географически ориентированного трехгранника, одна из осей которого лежит в плоскости географического меридиана, другая ось направлена на восток, а третья - совпадает с направлением гравитационного поля силы тяжести; определяют контрольные значения проекций векторов угловой скорости на ортогональные оси приборной системы координат, измеряют усредненные за время рабочего цикла значения проекций векторов угловой скорости на оси сферической системы координат, по которым с учетом коэффициентов коррекций, полученных в калибровочном цикле, определяют значения проекций векторов угловой скорости на оси приборной системы координат, в каждом рабочем цикле производят определение географического азимута направления движения объекта с помощью гироскопической системы угловой ориентации, а также производят определение дирекционных углов направления движения объекта при совместной обработке с помощью геомагнитной, гироскопической и спутниковой систем, по полученным значениям величин кажущихся ускорений движения за время рабочего цикла определяют приращения пути, по полученным ранее значениям горизонтальных проекций напряженности векторов магнитного поля и по значениям проекций векторов угловой скорости определяют координаты подвижного объекта, которые визуально фиксируют на электронной карте в каждом рабочем цикле в реальном времени; одновременно проводят анализ полученных ранее значений координат и дирекционных углов направления движения, по результатам вторичной обработки в автономном сегменте навигационного алгоритма с учетом линейного анализа величины отклонений берут в расчет показания той системы, которая выдает наиболее точные показания в зависимости от текущих внешних воздействий; при этом, процессы и функции, выполняемые вышеописанным навигационным алгоритмом, синхронизируют со шкалой единого времени.
Причем в способе значения проекций векторов угловой скорости на оси приборной системы координат определяют из системы дифференциальных уравнений движения датчика угловой скорости, при этом преобразование векторов угловой скорости из сферической системы координат в приборную систему координат осуществляют с помощью матрицы перехода; в каждом рабочем цикле принимают дифференциальные поправки от СРНС; синхронизацию со шкалой единого времени осуществляют с помощью передачи один раз в секунду импульсного сигнала, передний фронт которого с высокой точностью соответствует началу секунды единого времени; при определении дирекционных углов направления движения объекта учитывают действующее магнитное склонение конкретно для данной местности; величину приращения пути определяют по полученным значениям величин кажущихся ускорений движения за время рабочего цикла и/или с использованием одометрической системы счисления пути по детерминированному алгоритму расчета пройденного пути.
Решение поставленной задачи достигается также тем, что в навигационную систему для определения местоположения подвижных объектов, содержащую блок датчиков линейного ускорения, блок датчиков магнитного поля и приемник спутниковых радионавигационных систем (СРНС), согласно изобретению введены блок датчиков угловой скорости, блок согласования устройств по уровням сигнала, блок хранения времени, датчик перегрузки, блок калибровки и цифровой обработки, блок вычисления и управления, блок счисления пути, цифровой графический дисплей и интерфейс обмена, причем выходы блока датчиков линейного ускорения, блока датчиков магнитного поля и блока датчиков угловой скорости соединены, соответственно, с первым, вторым и третьим входами блока согласования устройств по уровням сигнала, первый, второй и третий выходы которого соединены с соответствующими входами блока калибровки и цифровой обработки, первый, второй и третий выходы которого соединены с соответствующими входами блока вычисления и управления, четвертый выход которого соединен с входом интерфейса обмена, выход которого соединен с шестым входом блока вычисления и управления; кроме того, выход блока датчиков линейного ускорения соединен с первым входом блока счисления пути, и через датчик перегрузки - с четвертым входом блока вычисления и управления, первый выход которого соединен с входом блока датчиков угловой скорости, а второй выход блока вычисления и управления соединен с входом приемника СРНС, первый выход которого через блок хранения времени соединен с восьмым входом блока вычисления и управления, а второй выход соединен с седьмым входом блока вычисления и управления, третий выход которого соединен с входом цифрового графического дисплея, а пятый выход блока вычисления и управления соединен со вторым входом блока счисления пути, выход которого соединен с пятым входом блока вычисления и управления.
При этом в навигационной системе блок вычисления и управления выполнен с возможностью определения координат местоположения, дирекционных углов направления движения, магнитного и географического азимута, дальности и углов до контрольных точек маршрута, пройденного пути и скорости подвижных наземных объектов на основе комплексной обработки информации, поступающей от блоков датчиков линейного ускорения, датчиков магнитного поля и датчиков угловой скорости, а также от приемника СРНС. Блок хранения времени выполнен с возможностью выдачи синхросигналов единого времени, сигналов для синхронизации блоков системы с единым временем, обеспечения постоянной привязки к шкале единого времени и хранения времени с высокой точностью. Блок калибровки и цифровой обработки выполнен с возможностью масштабирования аналоговых сигналов по заданному уровню и аппроксимацией напряжения в двоичный код. Датчик перегрузки выполнен с возможностью выработки цифрового сигнала тревоги (блокировки) для устранения баллистической погрешности второго рода (погрешности ускорения-затухания) блока угловой скорости на время устранения погрешности, а при восстановлении работоспособности - выработки цифрового сигнала разрешения работы.
Сущность изобретения поясняется с помощью следующих чертежей:
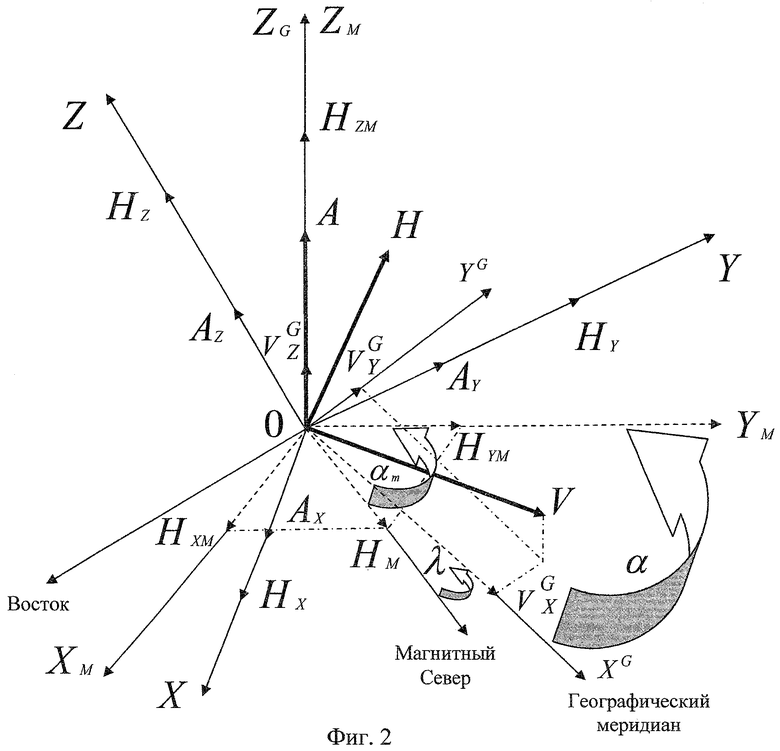
на фиг.2 представлена схема координат подвижного объекта;
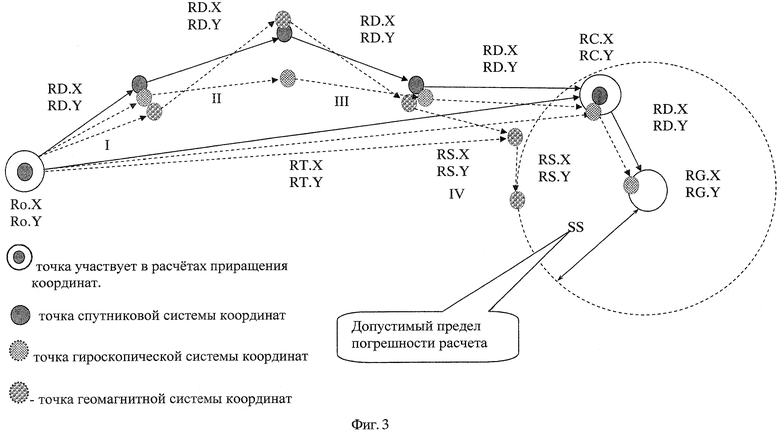
на фиг.3 отражена векторная диаграмма перемещения маршрута подвижного объекта с использованием геомагнитной и гироскопической систем угловой ориентации, с коррекцией по спутниковой навигационной системе;
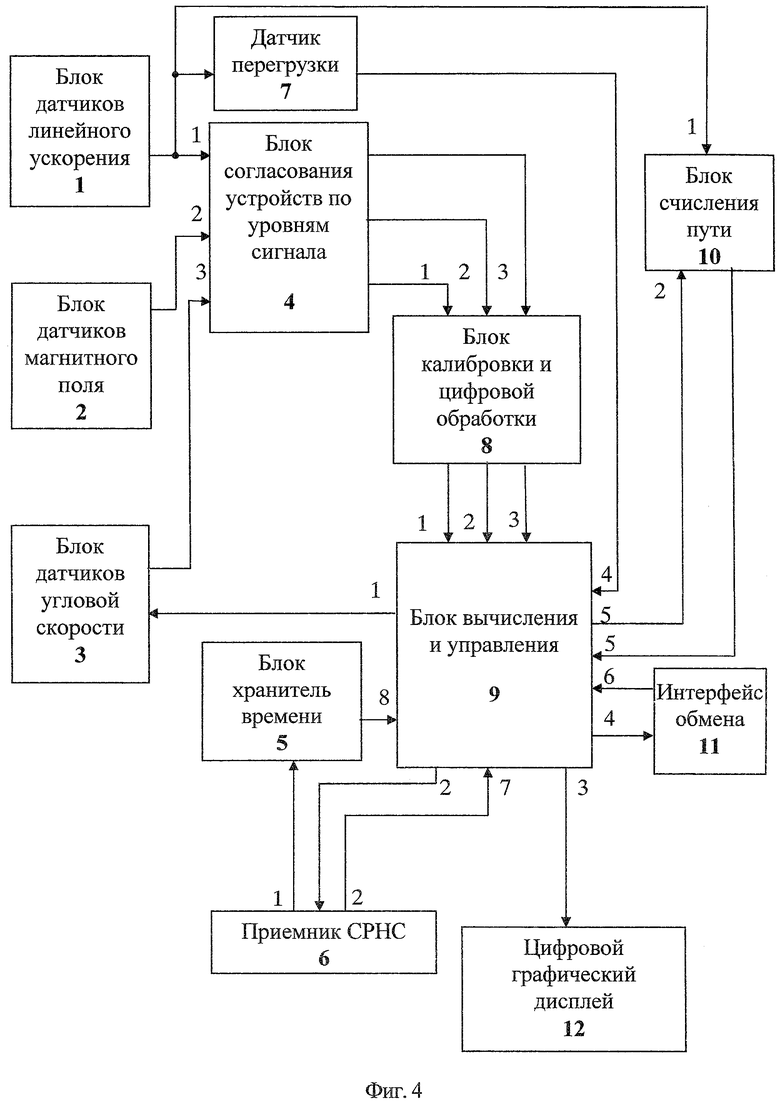
на фиг.4 представлена блок-схема комплексированной навигационной системы для определения местонахождения подвижного объекта.
Предлагаемый способ определения местоположения подвижных объектов заключается в следующем.
В начале с помощью СРНС определяют исходные координаты объекта, либо вводят вручную, с помощью топографических карт.
Затем в калибровочном цикле при использовании геомагнитной навигационной системы угловой ориентации определяют контрольные значения горизонтальных проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта.
В калибровочном цикле формируют оси гироскопической системы угловой ориентации в виде географически ориентированного трехгранника, в котором одна ось  - лежит в плоскости географического меридиана, другая ось
- лежит в плоскости географического меридиана, другая ось  - направлена на восток, а третья ось
- направлена на восток, а третья ось  - совпадает с направлением гравитационного поля силы тяжести.
- совпадает с направлением гравитационного поля силы тяжести.
В каждом рабочем цикле с помощью геомагнитной и гироскопической систем угловой ориентации измеряют усредненные за время рабочего цикла значения проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта, значения проекций векторов угловой скорости и значения проекций ускорения силы тяжести на оси приборной системы координат.
По измеренным значениям вышеуказанных проекций, с учетом коэффициентов коррекции, полученных в калибровочном цикле, определяют значения горизонтальных проекций векторов напряженности магнитного поля на оси горизонтальной системы координат объекта и проекций векторов угловой скорости на оси сферической системы координат.
Измеряют величины кажущихся ускорений движения за время рабочего цикла, по которым, путем интегрального преобразования по времени, вычисляют скорость движения объекта, по которой, путем интегрального преобразования по времени, вычисляют пройденный объектом путь и проекции пути с учетом углов наклона объекта, дирекционных углов и поправки направления движения.
Кроме того, величину приращения пути определяют с использованием одометрической системы счисления пути по детерминированному алгоритму расчета пройденного пути.
Измеряют географический азимут направления движения объекта с помощью гироскопической системы угловой ориентации, а также осуществляют процесс комплексного измерения азимутального угла направления движения с помощью геомагнитной и гироскопической систем угловой ориентации.
Определяют дирекционные углы и координаты объекта, по которым в каждом рабочем цикле проводят коррекцию относительных координат и координат исходной точки объекта, а так же осуществляют процесс комплексного измерения азимутального угла с помощью СРНС, геомагнитной и гироскопической систем угловой ориентации.
По значениям горизонтальных проекций векторов напряженности магнитного поля и проекций векторов угловой скорости, определяют углы направления движения с учетом приращения координат за время рабочего цикла, дирекционных углов направления движения, магнитного и географического азимута, пройденного пути и скорости подвижных наземных объектов на основе комплексной обработки информации, поступающей от геомагнитной и гироскопической навигационных систем, а также от приемника СРНС.
С учетом координат исходной точки, определяют координаты подвижного объекта, получаемые от навигационных систем с геомагнитной и гироскопической угловой ориентацией.
Далее, определяют относительные координаты подвижного объекта путем суммирования приращения координат подвижного объекта, измеренных ранее в каждом рабочем цикле.
Затем определяют координаты подвижного объекта путем суммирования относительных координат и координат исходной точки.
По текущим значениям координат объекта, которые визуально фиксируются на электронной карте маршрута в реальном времени, оценивают параметрическую надежность системы. В то же время, производят анализ показаний координат, вычисленных на основе значений, полученных от геомагнитной, гироскопической и спутниковой систем, а также дирекционных углов направления движения.
По результатам комплексированного алгоритма вторичной обработки в автономном сегменте, который можно классифицировать как детерминированный алгоритм предсказания по одной точке, с учетом линейного анализа величины отклонений берут в расчет показания той системы, которая выдает наиболее точные показания в зависимости от текущих внешних воздействий.
При этом процессы и функции, выполняемые вышеописанным навигационным алгоритмом, синхронизируют со шкалой единого времени.
При расхождении значений координат в автономном режиме производится оценка достоверности измерений, определяются зоны магнитных, электромагнитных, ионизационных и гравитационных аномалий. Производится оценка функциональной надежности системы.
С помощью СРНС измеряют координаты подвижного объекта, с учетом которых проводят коррекцию исходной точки, относительных координат и угловой ориентации объекта.
При необходимости осуществляют обмен информацией с автоматизированным рабочим местом.
Настоящее изобретение может быть реализовано с помощью устройства, представляющего собой комплексированную навигационную систему, блок-схема которой представлена на фиг.4.
Предлагаемая комплексированная навигационная система для определения местоположения подвижных объектов содержит блок датчиков линейного ускорения 1, блок датчиков магнитного поля 2, блок датчиков угловой скорости 3, блок согласования устройств по уровням сигнала 4, блок хранения времени 5, приемник спутниковых радионавигационных систем (СРНС) 6, в качестве которого может быть использован высокочувствительный спутниковый приемник GPS/Глонасс, датчик перегрузки 7, блок калибровки и цифровой обработки 8, блок вычисления и управления 9, блок счисления пути 10, интерфейс обмена 11 и цифровой графический дисплей 12. При этом выходы блока датчиков линейного ускорения 1, блока датчиков магнитного поля 2 и блока датчиков угловой скорости 3 соединены, соответственно, с первым, вторым и третьим входами блока согласования устройств по уровням сигнала 4, первый, второй и третий выходы которого соединены соответственно с первым, вторым и третьим входами блока калибровки и цифровой обработки 8, первый, второй и третий выходы которого соединены соответственно с первым, вторым и третьим входами блока вычисления и управления 9, четвертый выход которого соединен с входом интерфейса обмена 11, выход которого соединен с шестым входом блока вычисления и управления 9; кроме того, выход блока датчиков линейного ускорения 1 соединен с первым входом блока счисления пути 10, а через датчик перегрузки 7 - с четвертым входом блока вычисления и управления 9, первый выход которого соединен с входом блока датчиков угловой скорости (ДУС) 3, а второй выход соединен с входом приемника СРНС 6, первый выход которого через блок хранения времени 5 соединен с восьмым входом блока вычисления и управления 9, а второй выход приемника СРНС 6 соединен с седьмым входом блока вычисления и управления 9, третий выход которого соединен с входом цифрового графического дисплея 12, а пятый выход блока вычисления и управления 9 соединен со вторым входом блока счисления пути 10, выход которого соединен с пятым входом блока вычисления и управления 9.
Работа устройства основана на комплексной обработке информации, поступающей с блока датчиков линейного ускорения 1, блока датчиков магнитного поля 2, блока датчиков угловой скорости 3 и приемника СРНС 6.
В исходном состоянии блоки датчиков угловой скорости 3 (гироскопической системы угловой ориентации) и датчиков линейного ускорения 1 переходят в режим начальной выставки, причем по таблицам коррекции проводят точную калибровку смещений осей блока датчиков угловой скорости 3.
Известно, что северный магнитный полюс в действительности не совпадает с истинным географическим Севером. Истинный географический Север - это ось вращения Земли. В различных точках планеты эта разница, называемая деклинацией λ, может достигать ±25°. Деклинация зависит от географического расположения и определятся из геодезических таблиц. Из вышесказанного видно, что для точного определения направления движения на Север (азимута) при использовании геомагнитной системы угловой ориентации, работающей в автономном режиме, необходимо выполнение двух итераций:
1) измерение горизонтальных составляющих магнитного поля Земли на оси приборной системы координат HXM, HYM (при этом нужно учитывать крен объекта);
2) добавление или вычитание деклинации λ для коррекции курса на истинный географический Север.
При отсутствии приема сигналов СРНС в блок вычисления и управления 9 производится ввод координат начальной точки объекта (начальных координат объекта) X0, Y0 и значение магнитного склонения (поправки направления Δα для данной местности), которые проходят коррекцию в блоке вычисления и управления 9, с применением электронной таблицы коррекции, заложенной в навигационный алгоритм блока вычисления и управления 9.
В режиме измерения блок датчиков линейного ускорения 1, блок датчиков магнитного поля 2 и блок датчиков угловой скорости 3 непрерывно формируют на своих выходах аналоговые сигналы, пропорциональные соответствующим значениям проекций векторов HXM суммарного магнитного поля Земли и магнитного поля объекта, проекций векторов ускорения силы тяжести AX, AY, AZ и проекций векторов угловой скорости VX, VY, VZ на оси приборной системы координат OXYZ (фиг.2). Аналоговые сигналы с блоков датчиков 1, 2, 3 поступают соответственно на первый, второй и третий входы блока согласования устройств по уровням сигнала 4, где происходит подавление шумов и нормализация по уровню. Затем с выходов блока 4 аналоговые сигналы поступают соответственно на первый, второй и третий входы блока 8, где проходят отдельную цифровую обработку с последующей дискретизацией с помощью аналого-цифрового преобразователя, который является преобразователем последовательной аппроксимации, которую можно вычислить по формуле:

где Ts - период выборки;
Tb, - временная развертка;
NS - умножитель.
Затем скорректированные и оцифрованные значения проекций векторов ускорения силы тяжести  ,
,  ,
,  оцифрованные значения проекций векторов напряженности магнитного поля
оцифрованные значения проекций векторов напряженности магнитного поля  ,
,  , и оцифрованные значения проекций векторов угловой скорости
, и оцифрованные значения проекций векторов угловой скорости  ,
,  ,
,  c соответствующих выходов блока 8 поступают соответственно на первый, второй и третий входы блока 9, где проводится цифровой расчет горизонтальных проекций векторов магнитного поля Земли HXM, HYM, поступающих с блока 2, расчет проекций векторов ускорения силы тяжести AXM, AYM, AZM, поступающих с блока 1, и проекций векторов угловой скорости
c соответствующих выходов блока 8 поступают соответственно на первый, второй и третий входы блока 9, где проводится цифровой расчет горизонтальных проекций векторов магнитного поля Земли HXM, HYM, поступающих с блока 2, расчет проекций векторов ускорения силы тяжести AXM, AYM, AZM, поступающих с блока 1, и проекций векторов угловой скорости 
 ,
, 
поступающих с блока 3. Кроме того, с первого выхода блока 1 аналоговые сигналы поступают на вход блока 7 и первый вход блока 10, с выходов которых сигналы соответственно поступают на четвертый и пятый входы блока 9. При механических перегрузках, возникающих в процессе движения подвижного объекта, сигнал перегрузки с блока 1 поступает на вход датчика перегрузки 7, с выхода которого сигнал поступает на четвертый вход блока 9, с первого выхода которого блокирующий сигнал поступает на вход блока датчиков угловой скорости 3, в результате чего его работа блокируется на время перегрузки. При этом обработка информации о движении подвижного объекта производится с помощью геомагнитной системы угловой ориентации с использованием блоков 1 и 2. По окончании перегрузок с выхода датчика перегрузки 7 сигнал разрешения поступает на четвертый вход блока 9, с первого выхода которого сигнал разрешения работы по блоку 3 поступает на его вход. Одновременно с ускорением объекта измеряют интервал времени движения объекта в блоке 10, в котором измеряется кажущееся ускорение движения, в которое входит ускорение свободного падения; путем интегрирования полученного значения ускорения движения вычисляют скорость, последующим интегрированием скорости определяют пройденный путь. Сигналы коррекции координат подвижного объекта с первого выхода приемника СРНС 6 поступают на вход блока хранения времени 5, с выхода которого сигнал поступает на восьмой вход блока 9, для синхронизации метки времени и обеспечения временной стабильности. Со второго выхода блока 9 сигнал запроса поступает на вход приемника СРНС 6, со второго выхода которого ответный сигнал поступает на седьмой вход блока 9. Для контроля точности расчетов координат и обмена информацией введен блок интерфейса обмена 11, сигнал с выхода которого поступает на шестой вход блока 9, с четвертого выхода которого ответный сигнал поступает на вход интерфейса обмена 11. Сигнал с третьего выхода блока 9 поступает на вход цифрового графического дисплея 12, позволяющего использовать электронные карты для визуального наблюдения и управления работой навигационной системы.
По значениям  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  и по значению вычисленного приращения пройденного пути δS, с учетом поправки направления Δα, определяют приращение координат в блоке 9. В блоке 9 определяются приращения пройденного пути δS за каждый рабочий цикл в соответствии с фиг.3. По значениям приращений координат, измеренных в каждом рабочем цикле, определяют относительные координаты ΔX, ΔY в соответствии со значениями исходной точки X0, Y0. При отсутствии приема сигналов СРНС значения относительных координат и координат исходной точки геометрически суммируются в блоке 9, который обеспечивает определение координат с отображением навигационной информации на цифровом графическом дисплее 12.
и по значению вычисленного приращения пройденного пути δS, с учетом поправки направления Δα, определяют приращение координат в блоке 9. В блоке 9 определяются приращения пройденного пути δS за каждый рабочий цикл в соответствии с фиг.3. По значениям приращений координат, измеренных в каждом рабочем цикле, определяют относительные координаты ΔX, ΔY в соответствии со значениями исходной точки X0, Y0. При отсутствии приема сигналов СРНС значения относительных координат и координат исходной точки геометрически суммируются в блоке 9, который обеспечивает определение координат с отображением навигационной информации на цифровом графическом дисплее 12.
При резком старте или резком торможении объекта кратковременно блок датчиков линейного ускорения 1 переходит в режим ограничения и срабатывает датчик перегрузки 7, сигнал которого приходит на четвертый вход блока 9, где формируется ответный сигнал, который по цепи обратной связи с первого выхода блока 9 поступает на вход блока 3, работа которого блокируется на время действия перегрузки блока 1, по истечении которой подается сигнал разрешения работы с первого выхода блока 9 на вход блока 3. Во время действия блокирующих сигналов осуществляется калибровка блока датчиков угловой скорости 3 в целях устранения ошибок, связанных с погрешностью ускорения-затухания (баллистической погрешностью второго рода). На время блокировки датчиков угловой скорости в блоке 9 осуществляются вычисление приращений координат по значениям HXM, HYM блока датчиков магнитного поля 2. В каждом рабочем цикле блок 9 по значениям горизонтальных проекций HXM, HYM, значениям проекций угловых скоростей  значению поправки направления Δα и значению деклинации λ, проводит расчет дирекционного угла α направления движения.
значению поправки направления Δα и значению деклинации λ, проводит расчет дирекционного угла α направления движения.
Блок вычисления и управления 9, работающий в соответствии вышеописанным навигационный алгоритмом, может быть реализован на ПЛИС и процессоре семейства АРМ.
Цифровой графический дисплей 12 предназначен для визуального отображения измеряемых параметров на электронных картах в реальном времени, поступающих от СРНС и навигационных систем с гироскопической и магнитной угловой ориентацией, работающих в автономном режиме.
Введение в предлагаемом изобретении операции расчета угловой скорости движения объекта при использовании блока датчиков угловой скорости 3 для ориентации на истинный географический меридиан, введение датчика перегрузки 7, включающего операцию расчета угла по датчикам магнитного типа (вторичной обработки в автономном сегменте), для компенсации погрешностей ДУС (гирокомпаса), возникающих при ускоренном движении объекта, при резком ускорении и резком торможении объекта, связанных с баллистической погрешностью второго рода, или погрешностью ускорения-затухания, операции переориентации гирокомпаса на географический меридиан в случае работ в районе севера, а также вычисления разницы дирекционного угла между магнитным и географическим севером, чтобы в зависимости от ориентации гирокомпаса (север-юг), компенсировать угловую разницу (деклинацию λ≈±11,5°). Введение интерфейса обмена 11 позволяет организовать связь с автоматизированным рабочим местом, а с помощью блока хранения времени 5 обеспечивают стабилизированную секундную метки (временную стабильность), интегрируя кажущееся ускорение по времени, вычисляют скорость движения объекта и последующим интегрированием скорости определяют пройденный объектом путь посредством блока 10. Блок счисления пути может быть реализован на контроллерах серии МК с возможностью подключения дополнительных одометрических датчиков и акселерометров.
Все вышеупомянутое позволяет обеспечивать повышенную точность и достоверность определения координат объекта в сравнении с прототипом.
Это достигается, тем что:
1. Определение относительных координат проводится на основе комплексной обработки информации с учетом ее достоверности, поступающей с навигационных систем с геомагнитной и гироскопической угловой ориентации, работающих в автономном режиме, и СРНС. При этом, с одной стороны, обеспечивается учет систематических погрешностей автономной навигационной системы, с другой стороны, - геомагнитная автономная система позволяет скомпенсировать погрешности гирокомпаса, т.к датчики магнитного поля не реагируют на инерционные составляющие движения подвижного объекта.
2. Обеспечивается постоянная работа устройства, не требующая необходимости проведения отдельного калибровочного цикла, это достигается за счет введения датчика перегрузки 7, который реагирует на избыточный сигнал, полученный с блока 1, и вырабатывает логический сигнал, который поступает на блок 9, а затем с его выхода сигнал поступает в блок 3 и отключает его на время погашения возбуждающих сил инерции, в течение которых производится калибровка блока 3. По окончании калибровки блока 3 в блоке 9 формируется управляющий сигнал для переключения режима работы с блока 2 на блок 3.
Блоки датчиков 1 и 3 могут быть реализованы, например, на микросхемах типа ADIS16355, представляющих собой точно выровненные по осям и откалиброванные по смещению и чувствительности устройства.
Блок датчиков магнитного поля 2 может быть реализован, например, на микросхеме типа MMC212×MG фирмы MEMSIC.
В качестве датчика перегрузки может быть использован компаратор, с обратной связью и pic-микроконтроллер.
3. Введенный блок хранения времени 5 производит синхронизацию секундной метки по времени, полученной от приемника СРНС 6, и в автономном режиме обеспечивает временную стабильность системы, что повышает точность расчета пути и определения координат. В качестве блока хранения времени можно использовать, например, прецизионный кварцевый генератор с двойным термостатированием.
4. Введение интерфейса обмена 11 обеспечивает информационный обмен с автоматизированным рабочим местом.
5. Введение цифрового графического дисплея 12 позволяет использовать электронные карты, вести наблюдение в виде графиков, а также позволяет производить визуальный контроль работы навигационной системы.
В сравнении с прототипом, который требует проведение вынужденного калибровочного цикла, в связи с чем была необходима остановка работы устройства, в предлагаемом изобретении обеспечивается непрерывная работа системы за счет взаимозаменяемости автономных навигационных систем. Коррекция относительных координат и координат исходной точки производится как от спутниковой навигационной системы, так и от автономных навигационных систем. Кроме повышения точности следует отметить более высокую параметрическую и функциональную надежность и устойчивость работы предлагаемой системы, особенно в условиях воздействия помех, в районах магнитных аномалий, в зонах неустойчивого приема сигналов СРНС и т п. Использование в качестве приемника СРНС высокочувствительного спутникового приемника GPS/Глонасс 6 обеспечивает начальную привязку исходной точки без участия оператора.
Все вышеперечисленное позволяет обеспечивать решение задач, на которые направлено заявляемое изобретение.
Рассмотрим векторную диаграмму перемещения маршрута подвижного объекта, с использованием гироскопической и магнитной навигационных систем, с коррекцией по спутниковой навигационной системе, представленную на фиг.3, где обозначено:
- RO - координаты исходной точки;
- RD - приращение автономных координат за один цикл измерений;
- RT - смещение координат относительно исходной точки;
- RC - текущие координаты объекта (результат вычислений при совместной обработке);
- RG - координаты полученные от спутниковой навигационной системы;
- RS - координаты не участвующие в расчетах координат объекта;
- SS - максимально допустимый коэффициент ошибки (если превышает, то вводится фильтрация).
В исходной точке Ro производится калибровка и начальная выставка навигационных систем с использованием корректирующих поправок от СРНС. В первом цикле приращений автономных координат измерений фиксируются координаты, получаемые от трех навигационных систем. В этом пункте визуально демонстрируется точность работы комплексированной системы. Во втором цикле в результате воздействия экстремальных сил инерции, возникающих в процессе движения подвижного объекта (пробуксовка, резкое торможение, ускорение и т.д.), гироскопическая система дает погрешности (которые могут укладываться в допустимые пределы погрешности расчета). В этом случае наиболее точные результаты получаются от магнитной навигационной системы. Третий цикл демонстрирует адекватную работу комплексированной системы с хорошими точностными характеристиками. В четвертом цикле система фиксирует зону аномалий (геомагнитной, электромагнитной и т.д.), где магнитная система дает ошибку, выходящую за пределы допуска, и координаты в автономном режиме оцениваются по гироскопической навигационной системе. Таким образом, обеспечивается параметрическая надежность предложенной навигационной системы. При сбое или отказе одной из систем функциональная надежность обеспечивается другой навигационной системой.
Рассмотрим пример реализации предлагаемого способа.
Предварительно, до начала режима навигационных измерений, проводится калибровочный цикл, в котором измеряют значения горизонтальных проекций магнитного поля HXM, HYM в четырех ориентациях эллипса, соответствующих направлениям 0, 90, 180, и 270 градусов.
В исходном пункте с использованием блоков 1, 2, 3 производится измерение значений проекций AX, AY, AZ ускорения силы тяжести, проекций HXM, HYM суммарного вектора напряженности МПЗ и паразитного магнитного поля подвижного объекта и проекций VX, VY, VZ угловых скоростей на ортогональные оси приборной системы координат подвижного объекта. Оси приборной системы координат (см. фиг.2) скорректированы следующим образом. Ось OY направлена вдоль оси подвижного объекта по направлению его движения, ось ОХ - вдоль поперечной оси подвижного объекта (ПО), а ось OZ - вдоль его вертикальной оси.
Обозначим показания датчиков блоков 1, 2, 3 соответственно  ,
,  ,
,  и
и  ,
,  ,
,  и
и  ,
,  ,
,  . Проекции
. Проекции  ,
,  ,
,  , вектора магнитного поля Н, проекции
, вектора магнитного поля Н, проекции  ,
,  ,
,  вектора кажущегося ускорения А и проекции
вектора кажущегося ускорения А и проекции  ,
,  ,
,  угловой скорости V на оси приборной системы координат вычисляются из показаний блоков датчиков 1, 2 и 3 следующим образом:
угловой скорости V на оси приборной системы координат вычисляются из показаний блоков датчиков 1, 2 и 3 следующим образом:



Входящие в эти формулы смещения нулей ΔHK, ΔAK ΔVK блоков датчиков 1, 2, 3, а также их масштабные множители PHK, PAK, PVK находятся в процессе начальной калибровки блока датчиков. Кроме того, параметры ΔHK, PHK, PVK могут уточняются и изменяться в процессе устранения девиации.
Блоки датчиков 1, 2, 3 закреплены на подвижном объекте так, что ось OZ направлена ортогонально плоскости основания объекта, а ось OY расположена параллельно вертикальной плоскости, проходящей через продольную ось объекта.
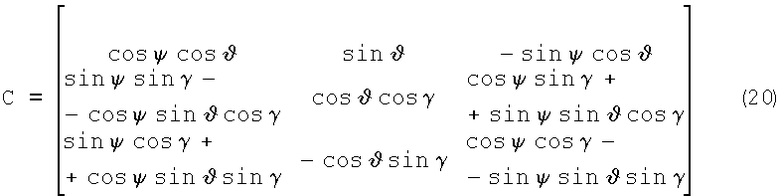
Известно, что гироскопическая система угловой ориентации не оценивает внешние воздействующие факторы, являясь инерциальной системой, которая не требует преобразования измеряемых величин, тогда как для определения магнитного курса подвижного объекта из приборной системы координат необходимо синтезировать вспомогательную систему координат для того, чтобы достоверно оценить магнитное поле Земли, которое действует в данной точке, на подвижный наземный объект OXMYMZM (Фиг 2), ось OZM которой направлена вертикально, а ось OYM - горизонтально в направлении движения. Проекции HXM, HYM, HZM напряженности магнитного поля на оси этой системы координат вычисляются с помощью матрицы С перехода от системы координат OXYZ к OXMYMZM:
Элементы строк матрицы С совпадают с компонентами ортов iM, jM, kM в системе координат OXYZ.
Вектор кажущегося ускорения А, измеряемый акселерометрами, складывается из вектора истинного ускорения относительно земной поверхности и вектора - g (минус g), где g - ускорение свободного падения. Орт, направленный по оси OZM, может быть определен выражением:

где  - величина вектора А.
- величина вектора А.
Компоненты вектора iM в приборной системе координат находим из условия перпендикулярности к вертикальной плоскости, проходящей через приборную ось OY:

Для вектора jM получаем:

Таким образом, матрица С имеет вид:

Определим горизонтальные составляющие вектора напряженности магнитного поля.

Магнитный азимут направления движения (магнитный курс) объекта αm определяется этими составляющими следующим образом:

Географический азимут направления движения (истинный курс) объекта определяется следующим образом.
Используя математический аппарат сферической тригонометрии, можно записать первую группу алгоритмов для азимутального ориентирования объектов в виде:
где α - азимутальный угол между приборной осью Y и плоскостью географического меридиана;
µ - угол между осью Y и линией пересечения экваториальной плоскости с плоскостью горизонта;
ω - угловая скорость вращения Земли;
φ0 - широта местонахождения;
t - время движения ДУС, измеряемое с момента начальной выставки;
Δω, Δλ - приращение координат по широте и долготе. Представленные алгоритмы соответствуют случаю, когда одна из осей гироскопа первоначально выставляется по вертикали места. При этом первый алгоритм используется для азимутального определения осей неподвижного объекта, а второй для подвижного объекта. При произвольной Δφ0 и начальной Δλ0 выставке осей параметры свободного движения ДУС будут отличаться от рассмотренных случаев угловыми параметрами. Определение угловых параметров при произвольной Δφ0 и начальной Δλ0 выставке осей осуществляется непосредственно перед азимутальным ориентированием объектов по алгоритму:
Тогда угловое положение ψ линий осей ДУС (при неподвижном основании) относительно плоскости меридиана может быть вычислено по алгоритму:

При азимутальном ориентировании подвижных объектов алгоритм вычисления ψ угла имеет вид:

Вторая группа алгоритмов азимутального ориентирования объектов с учетом дрейфа реального гироскопа может быть получена из системы дифференциальных уравнений движения ДУС:

где VX, Vy, VZ - угловые скорости вращения гироскопа относительно осей географической системы координат;
Mx, My - известные возмущающие моменты;
Н - кинетический момент скорости, необходимый для получения силы Кориолиса во время вращения.
Полученная система после линеаризации должна быть решена в отклонениях осей реального гироскопа от осей идеального (невозмущаемого) гироскопа:

где ψH, θH - расчетные угловые положения угловых осей и вертикальной оси вращения ДУС относительно географической системы координат;
Δφ, Δθ - отклонения осей реального гироскопа относительно осей идеального гироскопа, которые уточняются (корректируются) при периодических проверках одновременно с определением переменных коэффициентов уравнений.
Линейная система дифференциальных уравнений в отклонениях для реального гироскопа на основе системы (5) может быть записана в виде:
где коэффициенты:



Датчики линейных ускорений ориентированы по осям приборной системы координат OXYZ. Преобразование векторов из сферической систему координат в приборную осуществляется с помощью матрицы перехода:
Система линеаризованных уравнений (19) решается итеративными методами, основанными на разностных схемах, в реальном времени.
Совокупность всех частных решений или сочетания отдельных из них позволяет получить набор алгоритмов решения задач азимутального ориентирования для самых различных ситуаций.
Для определения дирекционного угла α необходимо учесть значение поправки направления Δα, которая равна сумме магнитного склонения θ, аппаратурной поправки ΔαA, вызванной отклонением оси OY блока 2 от продольной оси и деклинации ±λ.

Текущие координаты объекта при совместной (комплексной) обработке находятся в соответствии с фиг 3:

Суммируя приращения координат в течение одного цикла измерений, получают значения текущих координат объекта:

Среднеквадратическая погрешность SA координат, рассчитанных в автономном режиме, линейно увеличивается на каждом шаге вычислений

где δS - ожидаемая ошибка приращений координат на одном шаге вычислений.
В отсутствие сигналов СРНС расчет координат в каждом автономном цикле производится в соответствии с выражением:

При этом оценочное значение среднеквадратической ошибки увеличивается в соответствии с (24). При получении координат XR и YR от СРНС рассчитанные ранее относительные координаты ΔXT, ΔYT и координаты  ,
,  начальной точки уточняются в соответствии с формулами:
начальной точки уточняются в соответствии с формулами:
Элементы K1 и K2 матрицы усиления вычисляются следующим образом:
где Pij - элементы корреляционной матрицы ошибок экстраполяции Р. Эта матрица обновляется в каждом цикле обработки результатов наблюдения (при получении координат XR, YR от СРНС) в соответствии с формулой:

Дисперсия DA приращений автономных координат в период между последними двумя посылками СРНС определяется как  , после чего величина SA обнуляется. Для вычислений по формуле (28) необходимо задать матрицу Р в начальный момент времени. Начальное значение P=P0 определяется величиной дисперсии D0 координат начальной точки в момент старта:
, после чего величина SA обнуляется. Для вычислений по формуле (28) необходимо задать матрицу Р в начальный момент времени. Начальное значение P=P0 определяется величиной дисперсии D0 координат начальной точки в момент старта:

Эта дисперсия зависит от условий начала движения.
Описанный алгоритм обеспечивает надежную работу системы как при наличии, так и в отсутствии СРНС-посылок. Если сигналов от СРНС не поступает, координаты рассчитываются в автономном сегменте с соответствующим постепенным накоплением ошибок. При поступлении радионавигационной информации даже после длительного периода работы в автономном режиме, как следует из (13)-(15), происходит довольно быстрое уточнение координат и уменьшение их среднеквадратической погрешности. При дальнейшей совместной работе автономная аппаратура фактически осуществляет сглаживание в динамическом режиме координат от СРНС, тем самым делая их более точными. Отдельные заведомо ложные грубые скачки СРНС-координат в таком режиме могут быть просто отброшены. Собственная же ошибка автономных систем в этом случае (за время нескольких циклов) является совсем незначительной.
Как уже отмечалось, погрешности определения координат при длительной работе аппаратуры в автономном режиме во многом зависят от выбора правильных значений путевого множителя KS и поправки направления Δα. Дополнительная информация от приемника СРНС позволяет проводить непрерывную коррекцию этих параметров во время движения. Для этого формируются два массива одинаковой фиксированной длины, в которых хранятся результаты выборочных 10-20 последних измерений координат приемником СРНС и автономной аппаратурой. Выборка требуется для того, чтобы длина участка, на котором производится сравнение координат, значительно превышала ошибку измерений СРНС. Запись очередных точек в эти массивы производится одновременно при условии, что нет резкого скачка координат от приемника СРНС, и расстояние до предыдущей точки (по автономным вычислениям) составляет не менее 10 метров. Перед записью очередной точки производится сравнение приращений координат от начальной до конечной точки обоих массивов. Обозначим LR и LA - расстояние в метрах между первой и последней точками соответственно для СРНС и автономных массивов. Если разность этих расстояний по абсолютной величине не превосходит ожидаемой допустимой ошибки и LA>(100÷200) м, производится плавная коррекция параметров KS и Δα по формулам:


где δα - угол в градусах между направлениями от первой до последней точки соответственно для СРНС и автономных массивов,
QS и Qα - параметры фильтрации, определяемые опытным путем.
Процедура вычисления скорости по данным продольного ускорения выполняется в блоке вычислителя и управления 9 специальной программой. В качестве численного метода интегрирования используется метод Симпсона, общая формула которого:

а и b - нижний и верхний пределы соответственно;
n - четное число равноотстоящих по времени отсчетов.
Калибровку в рабочем режиме проводят в случае выявления погрешностей, связанных с баллистической погрешностью второго порядка, или погрешностью ускорения-затухания. При этом гирокомпас блокируется сигналом перегрузки, зависящим от значения момента сил инерции. Инерционная девиация проявляется в форме затухающих колебаний после окончания маневра подвижного объекта (курсом и/или скоростью).
Наибольшее значение инерционная погрешность первого рода имеет в момент окончания маневра, инерционная погрешность второго рода достигает наибольшей величины после окончания маневра. Совокупность перечисленных выше погрешностей образует суммарную погрешность гирокомпаса, подразделяемую на систематическую и случайную составляющую. Также калибровку проводят при возникновении других погрешностей, связанных с внешними аномальными факторами окружающей среды. Предусматривается взаимозаменяемость датчиков в процессе работы, например блока датчиков угловой скорости на блок датчиков магнитного поля Земли и/или наоборот. Так в случае отказа одних датчиков система проводит измерение по другим датчикам, обеспечивается постоянный рабочий режим системы, тем самым повышается ее оперативность, а также функциональная надежность.
Из вышесказанного следует, что использование в предлагаемом способе комплексной обработки информации с помощью геомагнитной и гироскопической навигационных систем позволяет обнаруживать и исключать ошибки приемника СРНС, а также выполняет функцию фильтра, резко уменьшающего случайные некоррелированные между собой ошибки отдельных измерений. Кроме того, такие навигационные системы могут работать самостоятельно при невозможности приема сигналов СРНС.
В свою очередь, информация от приемника СРНС позволяет отфильтровать ошибки измерений геомагнитной и гироскопической навигационных систем, в том числе вызванные кратковременным воздействием паразитных внешних магнитных полей, и дает возможность автоматически корректировать настраиваемые параметры комплексированной навигационной системы - поправку направления DAp, коэффициент пути Ks и деклинацию ±λ. При совместной обработке информации недостатки обеих систем взаимно компенсируются, и работа комплекса является более устойчивой по отношению к внешним воздействиям.
Таким образом, в предлагаемом способе введение комплексной обработки информации с подвижных объектов с использованием геомагнитной и гироскопической систем угловой ориентации, а также приемника СРНС позволяет повысить достоверность оценки местоположения объекта и оценить параметрическую надежность системы.
Источники информации
1. Патент РФ №2082098 "Способ комплексирования инерциальных навигационных систем и комплектированная навигационная система", 2007 г.
2. Патент РФ №2098764 "Способ определения местоположения подвижных объектов и устройство для его реализации", 1997 г.
3. Патент РФ №2334198 "Способ инерциальной навигации и устройство для его осуществления", 2008 г.
4. Патент РФ №2202102 "Способ определения местоположения подвижных объектов и устройство для его реализации", 2003 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2010 |
|
RU2436045C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2202102C2 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| СПОСОБ НАЧАЛЬНОГО ОРИЕНТИРОВАНИЯ ГИРОСКОПИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ДЛЯ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2016 |
|
RU2617147C1 |
| СПОСОБ КОНТРОЛЯ МАРШРУТОВ СЛЕДОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2194250C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2308681C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА | 2017 |
|
RU2671937C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЭТАЛОННОЙ КООРДИНАТНОЙ МОДЕЛИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2287187C1 |
| Способ автономной ориентации объектов в околоземном пространстве | 2022 |
|
RU2787971C1 |
Изобретение относится к области приборостроения и может быть использовано в навигационных приборах для определения координат подвижных объектов. Технический результат - повышение точности. Для достижения данного результата определяют с помощью геомагнитной и гироскопической систем угловой ориентации углы направления движения и приращения координат за время рабочего цикла. С помощью спутниковых радионавигационных систем измеряют координаты объекта. С учетом координат исходной точки определяют координаты подвижного объекта. Текущие значения координат фиксируют на электронной карте маршрута в реальном времени. Производят оценку параметрической и функциональной надежности. По результату линейного анализа измеренных параметров и отклонений движения в расчет берут показания той системы, которая выдает наиболее точные показания в зависимости от текущего воздействия. Комплексированная навигационная система содержит блок датчиков линейного ускорения, блок датчиков магнитного поля, блок датчиков угловой скорости, блок согласования устройств по уровням сигнала, блок хранения времени, высокочувствительный спутниковый приемник GPS/Глонасс, датчик перегрузки, блок калибровки и цифровой обработки, блок вычисления и управления, блок счисления пути, интерфейс обмена, цифровой графический дисплей. 2 н. и 10 з.п.ф., 4 ил.
1. Способ определения местоположения подвижных объектов, включающий измерение в калибровочном цикле с использованием геомагнитной системы угловой ориентации контрольных значений горизонтальных проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта, измерение усредненных за время рабочего цикла значений проекций ускорения силы тяжести, проекций суммарного вектора напряженности магнитного поля Земли и магнитного поля объекта на оси приборной системы координат, по которым с учетом коэффициентов коррекции, полученных в калибровочном цикле, производят определение значений горизонтальных проекций вектора напряженности магнитного поля Земли на оси горизонтальной системы координат объекта, по которым производят определение угла направления движения, и с учетом приращения пути производят определение приращения координат за время рабочего цикла, по которым с учетом координат начальной точки производят определение координат объекта; кроме того, включающий измерение с помощью приемника спутниковых радионавигационных систем (СРНС) координат объекта, по которым в каждом рабочем цикле производят коррекцию относительных координат и координат начальной точки объекта, отличающийся тем, что в калибровочном цикле формируют оси гироскопической системы угловой ориентации в виде географически ориентированного трехгранника, одна из осей которого лежит в плоскости географического меридиана, другая ось направлена на восток, а третья совпадает с направлением гравитационного поля силы тяжести; определяют контрольные значения проекций векторов угловой скорости на ортогональные оси приборной системы координат, измеряют усредненные за время рабочего цикла значения проекций векторов угловой скорости на оси сферической системы координат, по которым с учетом коэффициентов коррекций, полученных в калибровочном цикле, определяют значения проекций векторов угловой скорости на оси приборной системы координат, в каждом рабочем цикле производят определение географического азимута направления движения объекта с помощью гироскопической системы угловой ориентации, а также производят определение дирекционных углов направления движения объекта при совместной обработке с помощью геомагнитной, гироскопической и СРНС; определяют величину приращения пути, по которой производят перерасчет проекции пути с учетом углов наклона объекта, дирекционных углов и поправки направления движения, по полученным ранее значениям горизонтальных проекций напряженности векторов магнитного поля и по значениям проекций векторов угловой скорости определяют координаты подвижного объекта, которые визуально фиксируют на электронной карте в каждом рабочем цикле в реальном времени; одновременно проводят анализ полученных ранее значений координат и дирекционных углов направления движения, по результатам вторичной обработки в автономном сегменте навигационного алгоритма с учетом линейного анализа величины отклонений берут в расчет показания той системы, которая выдает наиболее точные показания в зависимости от текущих внешних воздействий; при этом процессы и функции, выполняемые вышеописанным навигационным алгоритмом, синхронизируют со шкалой единого времени.
2. Способ по п.1, отличающийся тем, что значения проекций векторов угловой скорости на оси приборной системы координат определяют из системы дифференциальных уравнений движения датчика угловой скорости, при этом преобразование векторов из сферической системы координат в приборную систему координат осуществляют с помощью матрицы перехода.
3. Способ по п.1, отличающийся тем, что в каждом рабочем цикле принимают дифференциальные поправки от приемника СРНС.
4. Способ по п.1, отличающийся тем, что осуществляют обмен информацией с автоматизированным рабочим местом.
5. Способ по п.1, отличающийся тем, что синхронизацию со шкалой единого времени осуществляют с помощью передачи один раз в секунду импульсного сигнала, передний фронт которого с высокой точностью соответствует началу секунды единого времени.
6. Способ по п.1, отличающийся тем, что при определении дирекционного угла направления движения объекта учитывают действующее магнитное склонение конкретно для данной местности.
7. Способ по п.1, отличающийся тем, что величину приращения пути определяют по полученным значениям величин кажущихся ускорений движения за время рабочего цикла и/или с использованием одометрической системы счисления пути по детерминированному алгоритму расчета пройденного пути.
8. Комплексированная навигационная система для определения местоположения подвижных объектов, содержащая блок датчиков линейного ускорения, блок датчиков магнитного поля и приемник спутниковых радионавигационных систем (СРНС), отличающаяся тем, что введены блок датчиков угловой скорости, блок согласования устройств по уровням сигнала, блок хранения времени, датчик перегрузки, блок калибровки и цифровой обработки, блок вычисления и управления, блок счисления пути, цифровой графический дисплей и интерфейс обмена, причем выходы блока датчиков линейного ускорения, блока датчиков магнитного поля и блока датчиков угловой скорости соединены соответственно с первым, вторым и третьим входами блока согласования устройств по уровням сигнала, первый, второй и третий выходы которого соединены с соответствующими входами блока калибровки и цифровой обработки, первый, второй и третий выходы которого соединены с соответствующими входами блока вычисления и управления, четвертый выход которого соединен с входом интерфейса обмена, выход которого соединен с шестым входом блока вычисления и управления; кроме того, выход блока датчиков линейного ускорения соединен с первым входом блока счисления пути и через датчик перегрузки с четвертым входом блока вычисления и управления, первый выход которого соединен с входом блока датчиков угловой скорости, а второй выход блока вычисления и управления соединен с входом приемника СРНС, первый выход которого через блок хранения времени соединен с восьмым входом блока вычисления и управления, а второй выход приемника СРНС соединен с седьмым входом блока вычисления и управления, третий выход которого соединен с входом цифрового графического дисплея, а пятый выход блока вычисления и управления соединен со вторым входом блока счисления пути, выход которого соединен с пятым входом блока вычисления и управления.
9. Система по п.8, отличающаяся тем, что блок вычисления и управления выполнен с возможностью определения координат местоположения, дирекционных углов направления движения, магнитного и географического азимута, дальности и углов до контрольных точек маршрута, пройденного пути и скорости подвижных наземных объектов на основе комплексной обработки информации, поступающей от блоков датчиков линейного ускорения, датчиков магнитного поля и датчиков угловой скорости, а также от приемника СРНС.
10. Система по п.8, отличающаяся тем, что блок хранения времени выполнен с возможностью выдачи синхросигналов единого времени, сигналов для синхронизации объектов с единым временем, обеспечения постоянной привязки к шкале единого времени и хранения времени с высокой точностью.
11. Система по п.8, отличающаяся тем, что блок калибровки и цифровой обработки выполнен с возможностью масштабирования аналоговых сигналов по заданному уровню и аппроксимации напряжения в двоичный код.
12. Система по п.8, отличающаяся тем, что датчик перегрузки выполнен с возможностью выработки цифрового сигнала тревоги (блокировки) для устранения баллистической погрешности второго рода (погрешности ускорения-затухания) блока угловой скорости на время устранения погрешности, а при восстановлении работоспособности - выработки цифрового сигнала разрешения работы.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2202102C2 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| КОМПЛЕКСНАЯ СИСТЕМА НАВИГАЦИИ | 1992 |
|
RU2023983C1 |
| US 5237952 А, 24.08.1993 | |||
| БАБИЧ О.А | |||
| Обработка информации в навигационных комплексах | |||
| - М.: Машиностроение, 1991, с.6-8. | |||

