[001] Настоящее описание относится к технической области применения радиолокационных систем, в частности, к бистатической радиолокационной станции (РЛС).
[002] Известно, что сухопутные транспортные средства или суда, например, военные корабли, оснащаются радиолокационными системами, позволяющими контролировать окружающее пространство для выявления возможных угроз.
[003] Данные радиолокационные системы с течением времени прошли длительную эволюцию. Вначале радиолокационные системы разрабатывались с углом обзора луча 360° в азимутальной плоскости, при этом РЛС содержала объемную отражательную антенну, обычно устанавливаемую на вращающейся платформе, смонтированной на транспортном средстве. Вышеуказанные радиолокационные системы со временем эволюционировали в самые современные радиолокационные системы, у которых не было вращающихся платформ и в которых для обеспечения как можно более широкого обзора в азимутальной плоскости используется несколько активных плоских фазированных антенных решеток (ФАР). Например, известны радиолокационные системы, у которых имеется четыре активных плоских ФАР, каждая из которых установлена на передней части корабельной мачты и по существу имеет форму усеченной пирамиды с четырехугольным основанием.
[004] Активная РЛС с ФАР, благодаря способности быстро и контролируемо менять направление луча, дает возможность носителю, например, военному кораблю, использовать единственную радиолокационную систему для обнаружения объектов и контроля поверхностей (например, для выявления кораблей), контроля воздушного пространства (для обнаружения воздушных судов и ракет), направления управляемых ракет и управления артиллерийскими системами.
[005] РЛС с активной плоской ФАР существующего уровня техники, до сих пор устанавливаемые на таких носителях, как военные корабли, обычно являются моностатическими РЛС, т.к. каждая антенная решетка состоит из нескольких как приемных, так и передающих модулей, каждый из которых последовательно коммутируются в момент между двумя рабочими режимами, соответственно, передающим и приемным. По этой причине вышеуказанные радиолокационные системы с ФАР существующего уровня техники особенно дорогостоящие. Также было отмечено, что в конструкции радиолокационных систем, в которой предусматриваются четыре активные плоские ФАР, каждая из которых установлена на передней поверхности корабельной мачты по существу в форме усеченной пирамиды с квадратным основанием, не обладают равномерными рабочими характеристиками по всей азимутальной плоскости, при этом данные характеристики особенно ухудшаются в направлениях, фронтальных к ребрам усеченной пирамиды. Другими словами, вышеуказанная РЛС существующего уровня техники характеризуется потерями при сканировании в горизонтальной плоскости.
[006] Описание известной РЛС, обладающей конической геометрической формой, приводится в документе JP Н06249945 А. В этом документе описывается не бистатическая РЛС, т.е. РЛС с передающими и приемными модулями, в которых аналоговые фазовращатели присутствуют в приемном тракте для наведения принимаемых лучей. По этой причине в данной РЛС на приемной стороне не предусмотрены ни полностью цифровой диаграммообразующий блок, ни цифровое образование диаграммы направленности. Антенна к тому же разделена на горизонтальные секции в форме усеченного конуса, каждая из которых работает на соответствующей частоте. У такой РЛС имеется серьезный недостаток, заключающийся в невозможности формирования нескольких независимых лучей и невозможности управления амплитудой на поверхности усеченного конуса, при этом главные лепестки диаграммы направленности образуются с боковыми лепестками высокого уровня.
[007] Общей целью настоящего описания является создание РЛС, у которой не будет недостатков, указанных выше, по сравнению с существующим уровнем техники.
[008] Данная и другие цели достигаются с помощью бистатической РЛС, как указано в первом пункте формулы изобретения, в ее наиболее общей форме, а также в зависимых пунктах формулы изобретения в некоторых его конкретных вариантах осуществления.
[009] Настоящее изобретение легче будет понять из нижеприведенного подробного описания вариантов его осуществления, изложенного посредством неограничивающего примера со ссылкой на прилагаемые рисунки, где:
- на Фиг. 1 показана функциональная блок-схема варианта осуществления бистатической РЛС, включающей в себя передающую антенну и приемную антенну;
- на Фиг. 2 схематично на виде сбоку показан вариант осуществления передающей антенны и приемной антенны, где эти две антенны показаны в исполнении с механическим соединением друг с другом;
- на Фиг. 3 схематично на виде сверху показана передающая антенна и приемная антенна, где эти две антенны показаны в исполнении с механическим соединением друг с другом;
- на Фиг. 4 схематично показан вид сбоку в разрезе передающей антенны;
- на Фиг. 5 показан главный вид в разрезе передающей антенны;
- На Фиг. 6 схематично показан первый режим передачи передающей антенны;
- На Фиг. 7 схематично показан второй режим передачи передающей антенны;
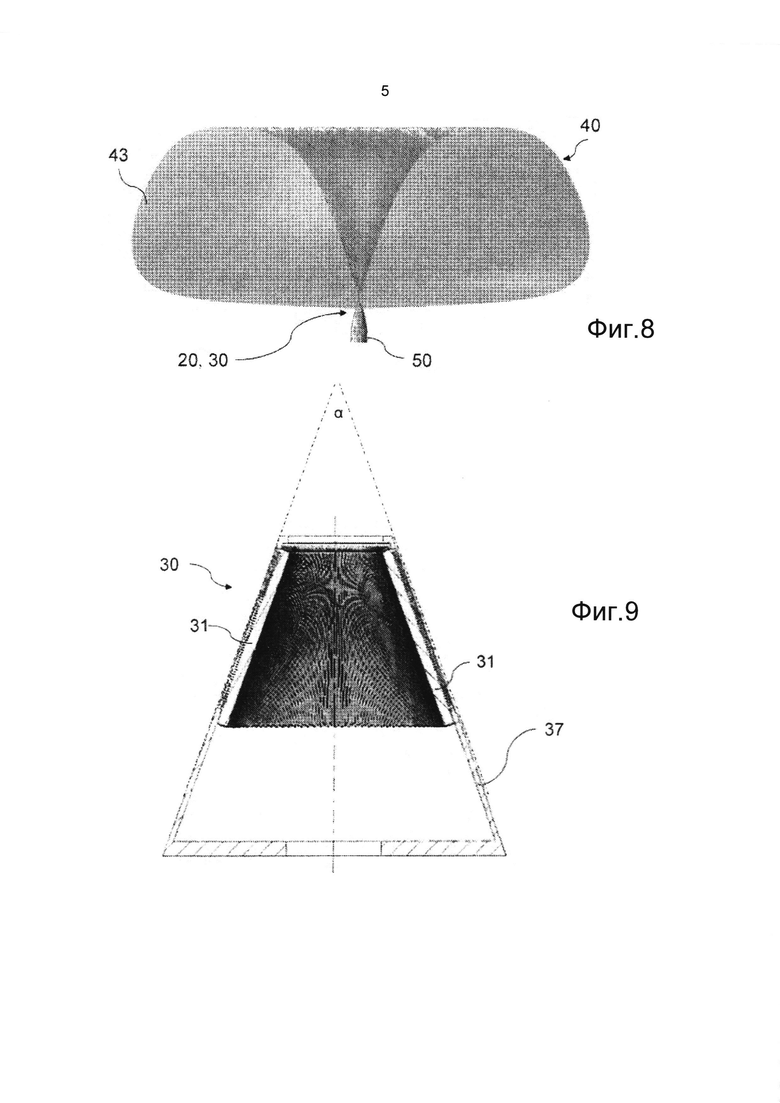
- На Фиг. 8 схематично показан третий режим передачи передающей антенны;
- на Фиг. 9 схематично показан вид сбоку в разрезе приемной антенны;
- На Фиг. 10 показана корабельная мачта с бистатической РЛС, приведенной на Фиг. 1;
- На Фиг. 11 показано наземное транспортное средство, оснащенное бистатической РЛС, приведенной на Фиг. 1.
[0010] На прилагаемых чертежах одинаковые или аналогичные элементы указываются теми же цифровыми позиционными обозначениями.
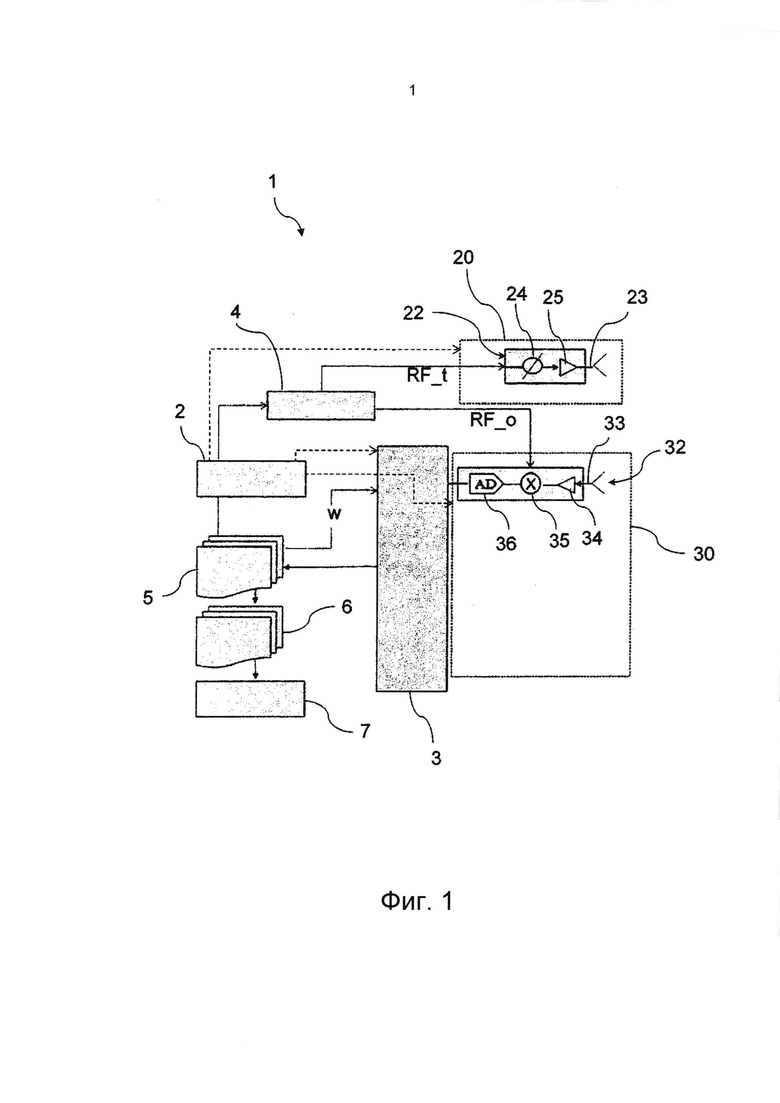
[0011] На Фиг. 1 показана функциональная блок-схема бистатической РЛС 1, содержащей передающую антенну 20 и приемную антенну 30. На конкретном приведенном примере и, таким образом, без наложения каких-либо ограничений, бистатическая РЛС 1 представляет собой РЛС на военном корабле. Однако следует отметить, что доктрины настоящего описания неограниченно применимы к конкретным областям применения бистатической РЛС 1, при этом бистатическая РЛС 1, на которую приводится ссылка в настоящем описании, может быть любой РЛС, которую можно применять, например, в телекоммуникационной отрасли, в гражданской авиации, в приборах для научных измерений.
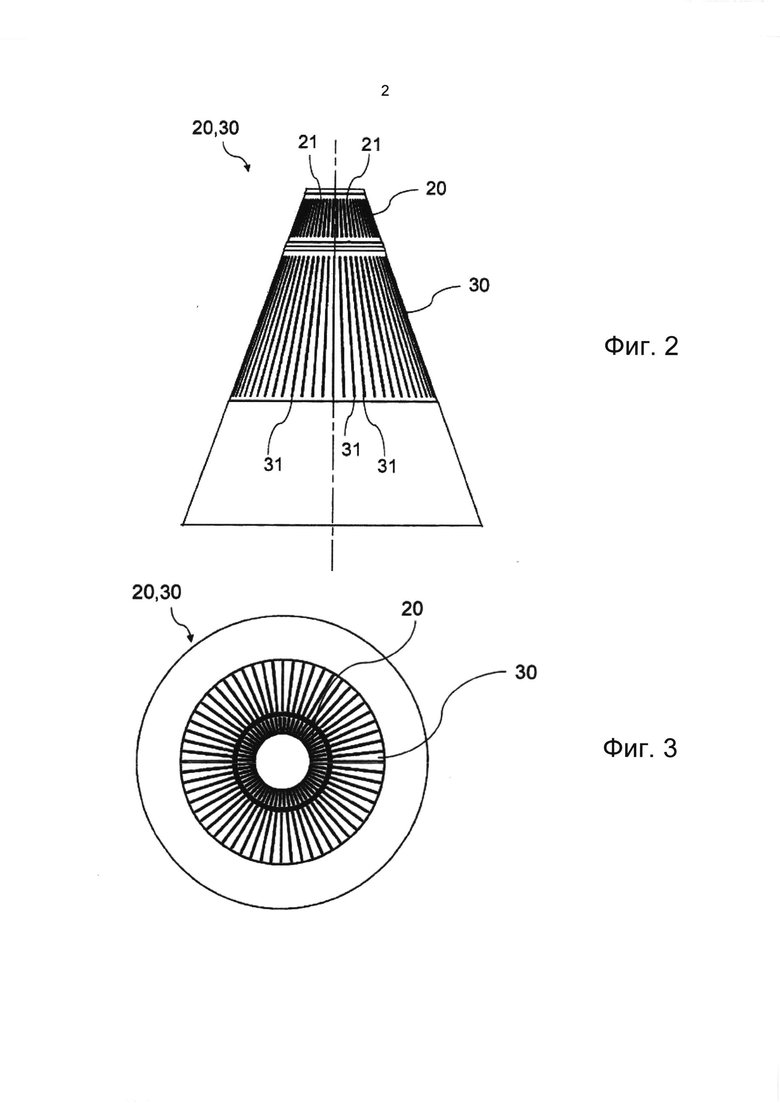
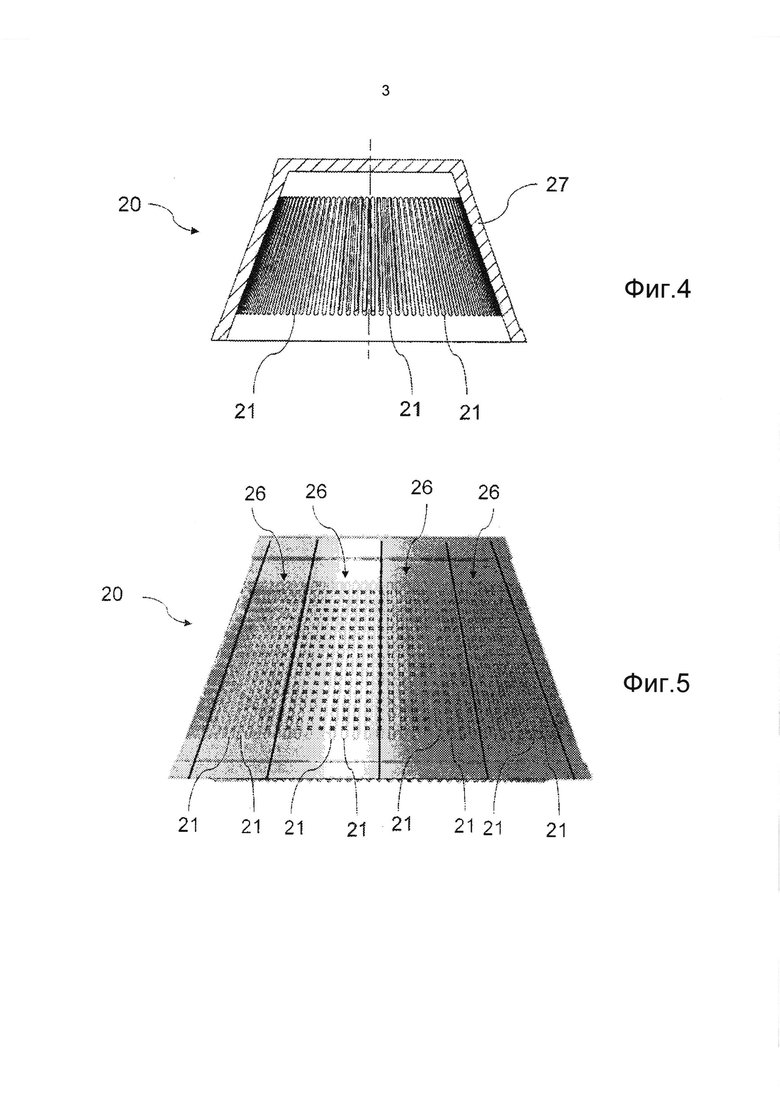
[0012] Бистатическая РЛС 1 содержит активную передающую ФАР 20, выполненную с возможностью излучения радиочастотного (РЧ) выходного сигнала 40. Активная передающая ФАР 20 содержит цилиндрическую, коническую или имеющую форму усеченного конуса решетку из колонок 21 активных передающих модулей 22. На примере, приведенном на чертежах, решетка из колонок 21 активных передающих модулей 22 является, в частности, решеткой, имеющей форму усеченного конуса, с основанием в форме окружности, где колонки 21 активных передающих модулей 22 направляются по образующей вышеупомянутого усеченного конуса.
[0013] Например, вышеупомянутая решетка колонок 21 передающих модулей 22 содержит сто колонок 21 активных передающих модулей 22 таким образом, что число активных передающих модулей 22 передающей антенны равно, например, ста шестидесяти.
[0014] Предпочтительно каждая из колонок 21 представляет собой блок, физически независимый от других, который крепится внутри опорной конструкции 27 передающей антенны 20, выполненной, например, из углеродного волокна или алюминия. Такая опорная конструкция 27 имеет, например, пазы (выполненные в виде сквозных отверстий в форме паза), к каждому из которых крепится соответствующая колонка 21 активных передающих модулей 22. Согласно одному из вариантов осуществления изобретения, вышеупомянутая опорная конструкция 27 закрывается обтекателем, не показанным на рисунках, налагаемым сверху и соприкасающимся с опорной конструкцией 27, при этом данный обтекатель может изготавливаться из материала, пригодного для работы в качестве полосового фильтра для части спектра требуемых частот. Например, обтекатель изготавливается из кевлара или стекловолокна.
[0015] Как показано на Фиг. 1, согласно одному из вариантов осуществления изобретения, каждый активный передающий модуль 22 передающей антенны 20 содержит каскадом вход, выполненный так, чтобы принимать модулированный передаваемый РЧ сигнал RF_t, фазовращатель 24, выполненный с возможностью осуществления задержки фазы упомянутого модулированного сигнала RF_t, усилитель мощности 25 (по этой причине передающая антенна определяется как «активная ФАР») и передающий антенный элемент 23. Передающий антенный элемент 23 представляет собой, например, микрополосковую антенну или дипольную антенну. Бистатическая РЛС 1 содержит, например, генератор 4 сигналов для подачи на каждый активный передающий модуль 22 передаваемого модулированного РЧ сигнала RF_t.
[0016] Кроме того, бистатическая РЛС 1 содержит планировщик 2 блока активности РЛС, выполненный с возможностью управления генератором 4 сигналов и передающей антенной 20. Например, в каждом активном передающем модуле 22 фазовращатель 24 выполняется с возможностью принимать на входе цифровой сигнал управления, подаваемый на выход блоком 2 планировщика для управления задержкой фазы, создаваемой фазовращателем 24 в модулированном РЧ сигнале RF_t.
[0017] Кроме того, бистатическая РЛС 1 включает в себя приемную антенну 30, содержащую имеющую форму усеченного конуса решетку колонок 31 приемных модулей 32, направленных по образующей усеченного конуса. Как показано на рис 9, согласно предпочтительному варианту осуществления, вышеупомянутый усеченный конус имеет телесный угол апертуры α от 10° до 60°, включая крайние значения. Например, упомянутый телесный угол апертуры α равен или приблизительно равен 30°.
[0018] Каждый приемный модуль 32 содержит каскадом приемный антенный элемент 33, аналоговый усилитель 34 и аналогово-цифровой преобразователь (АЦП) 36, выполненный с возможностью подавать на выход цифровые выборки. Предпочтительно аналоговый усилитель 34 является малошумящим усилителем. Каждый приемный антенный элемент 33 является, например, микрополосковой антенной или диполем. АЦП является, например, восьми- или шестнадцатибитовым преобразователем.
[0019] Согласно одному из вариантов осуществления, каждый приемный модуль 32 содержит перед АЦП 36 низкочастотный преобразовательный блок 35, например, смеситель, выполненный с возможностью преобразования принимаемого сигнала в полосу частот или промежуточную частоту (ПЧ). С этой целью каждый приемный модуль 32 выполняется с возможностью принимать на входе РЧ сигнал RF_o, подаваемый на выход генератором 4 сигналов. Следует помнить, что некоторые элементы приемного модуля 32 могут дублироваться для обеспечения выборки фазовой части и квадратурной части сигнала, принимаемого антенным элементом 33.
[0020] Предпочтительно каждая из колонок 31 или каждый из приемных модулей 32 являются блоком, физически независимым от других блоков, и крепятся внутри опорной конструкции 37 приемной антенны 30, например, имеющей форму усеченного конуса и, например, выполненной из углеродных волокон или алюминия. Такая опорная конструкция 37 имеет, например, пазы (выполненные как сквозные отверстия в форме паза), в каждом из которых крепится соответствующая колонка 31 приемных модулей 32. Согласно одному из вариантов осуществления, вышеупомянутая опорная конструкция 37 закрывается обтекателем, не показанным на рисунках, надетым сверху и находящимся в соприкосновении с опорной конструкцией 37, при этом обтекатель может быть выполнен из материала, пригодного для работы в качестве полосового фильтра для части спектра требуемых частот. Обтекатель может изготавливаться, например, из кевлара или стекловолокна.
[0021] Если обе опорные конструкции 27 и 37 физически наложены друг на друга (т.е. надеты одна на верх другой), можно предусмотреть один обтекатель, закрывающий и передающую антенну 20, и приемную антенну 30.
[0022] Согласно одному из вариантов осуществления, передающая антенна 20 и приемная антенна 30 являются двумя отдельными конструкциями, надетыми друг на друга коаксиально. На конкретном примере, приведенном на Фиг. 2 и 3, передающая антенна 20 и приемная антенна 30 вместе образуют непрерывную конструкцию в форме усеченного конуса. Кроме того, в частности, на неограничивающем примере, приведенном на Фиг. 2 и 3, передающая антенна 20 надета на приемную антенну 30.
[0023] Согласно предпочтительному варианту осуществления, число приемных модулей 32 приемной антенны 30 больше, чем число активных передающих модулей 22 передающей антенны 20. Например, приемная антенна 30 содержит двести колонок 31, при этом каждая колонка содержит шестьдесят четыре приемных модуля 32. В данном примере приемная антенна содержит двенадцать тысяч восемьсот приемных модулей 32 (в то время как в вышеприведенном примере передающая антенна 20 включает в себя тысячу шестьсот передающих модулей 22, число приемных модулей 32, следовательно, равно восьмикратному числу передающих модулей 22). Также число приемных модулей 32 в той же колонке 31 приемной антенны 30 предпочтительно больше, чем число передающих модулей 22 в той же колонке 21 передающей антенны 20.
[0024] Согласно одному из вариантов осуществления, приемная антенна 30 содержит на каждую из колонок 31 приемных модулей 32 одну или несколько плат программируемых вентильных матриц, выполненных с возможностью обработки сигнала, принятого приемными антенными элементами 33 для подачи на выход цифровых выборок. Например, на каждую колонку 31 шестидесяти четырех приемных модулей 32 предусматривается шестнадцать плат программируемых вентильных матриц, каждая из которых оперативно подсоединена к четырем соответствующим приемным антенным элементам 33. Также может предусматриваться колонка концентратора данных, выполненная с возможностью осуществлять сбор цифровых выборок, подаваемых на выход со всех приемных модулей 32, принадлежащих той же колонке 31, для концентрации упомянутых выборок в одном или нескольких сигналах.
[0025] Бистатическая РЛС 1 включает в себя, кроме того, полностью цифровой диаграммообразующий блок 3, выполненный с возможностью приема на входе и числовой обработки цифровых выборок, подаваемых на выход приемной антенной 30. В частности, такой блок 3 содержит цифровой процессор, который при приеме весовых множителей W на входе выполнен с возможностью рассчитывать разные взвешенные линейные сочетания вышеупомянутых цифровых выборок, подаваемых на выход приемной антенной 30. Согласно варианту осуществления, в котором предусматриваются колонки концентраторов в приемной антенне 30, возможно выполнить оптоволоконное соединение между колонками концентраторов и полностью цифровым диаграммообразующим блоком 3.
[0026] Согласно одному из вариантов осуществления, бистатическая РЛС 1 содержит процессор 5 сигналов, оперативно подключенный к планировщику 2 и к полностью цифровому диаграммообразующему блоку 3 и выполненный с возможностью подавать на диаграммообразующий блок 3 весовые множители W и принимать на входе с последнего рассчитанные взвешенные линейные сочетания. Каждое линейное сочетание соответствует лучу приемной антенны, а весовые множители выбираются предпочтительно, также для того, чтобы определить наведение луча приемной антенны и чтобы создать приемные «дыры» в направлениях, которые имеют высокий уровень возмущений окружающей среды. Число импульсов и синхронизация при передаче планируются блоком 2 планировщика как функция продолжающейся активности РЛС, которая автоматически обновляется в функции обработки в процессоре 5 сигналов.
[0027] В дополнение к процессору 5 сигналов можно предусмотреть, чтобы бистатическая РЛС 1 содержала кроме этого еще и процессор 6 данных, оперативно подключенный к процессору 5 сигналов, а также командно-управляющий пульт 7, оперативно подключенный к процессору 6 данных.
[0028] Согласно еще одному варианту осуществления, полностью цифровой диаграммообразующий блок 3 выполнен так, чтобы производить числовую обработку цифровых выборок для цифрового синтезирования нескольких одновременных и независимых принимаемых лучей.
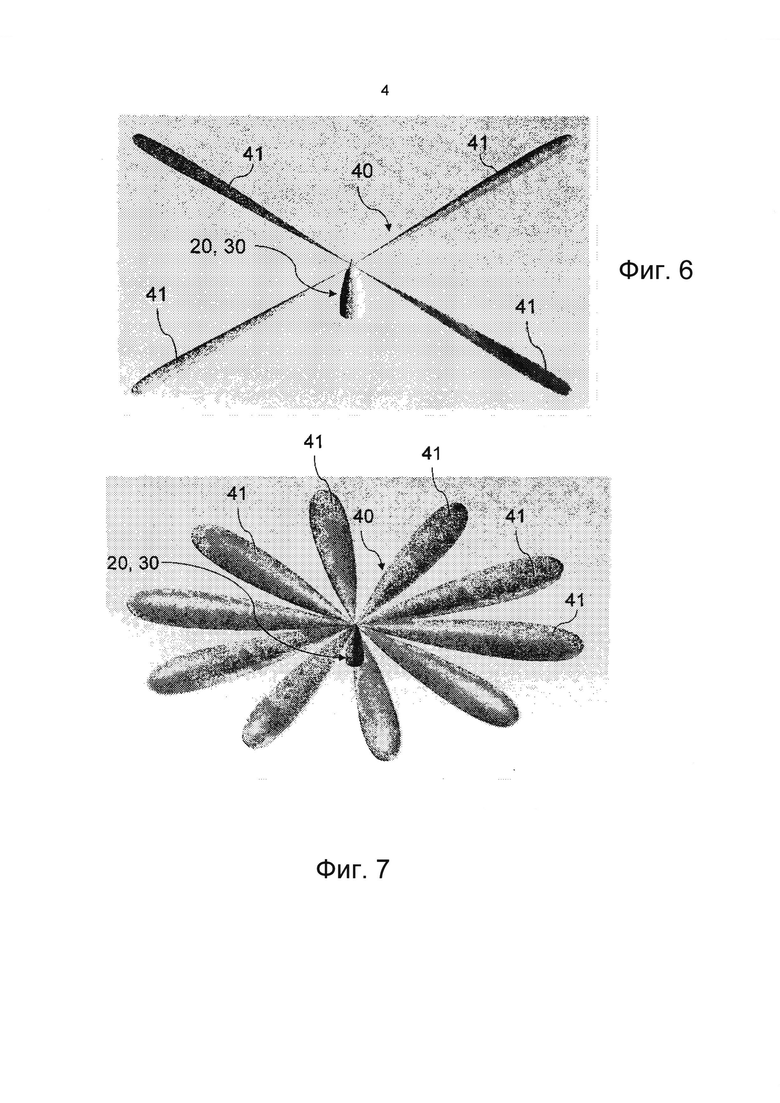
[0029] Как видно на Фиг. 6 и 7, согласно одному из вариантов осуществления, блок 2 планировщика активности РЛС выполнен с возможностью управления передающей антенной 20, приемной антенной 30 и полностью цифровым диаграммообразующим блоком 3 согласно первому рабочему режиму, при котором передающая антенна 20 управляется так, что выходной РЧ сигнал 40 (т.е. излучаемый сигнал) имеет N направленных передаваемых лучей 41, где N - целое число больше единицы или равное единице, при этом если N больше единицы, упомянутые лепестки 41 являются одновременными, т.е. излучаемыми одновременно.
[0030] Направлением наведения и апертурой каждого направленного передаваемого луча 41 можно управлять по углу возвышения и/или азимуту с помощью блока 2 планировщика активности РЛС. В частности, каждый направленный передаваемый луч 41, например, карандашный, образуется соответствующей подрешеткой соседних колонок 21 активных передающих модулей 22, выбираемой электронным способом и центрируемой по азимуту относительно направления наведения соответствующего направленного передаваемого луча 41. Вышеупомянутые подрешетки соседних колонок 21 не имеют общих колонок, т.е. они не находятся одни над другими.
[0031] На примере, приведенном на Фиг. 6, сигнал 40, излучаемый передающей антенной 20, включает в себя четыре одновременных направленных лучей 41 (следовательно, N=4), например, для осуществления бистатической РЛС 1 наблюдения или отслеживания одной или нескольких дальних целей (например, на дистанциях порядка 80-100 км). Для получения такого излучаемого сигнала передающая антенна 20 разделается, например, на четыре подрешетки колонок 21, при этом каждая из этих подрешеток служит для излучения соответствующего направленного луча 41. При ведении дальнего наблюдения направленные передаваемые лучи 41 поворачиваются в азимутальной плоскости, заставляя поворачиваться подрешетки электронным способом с тем, чтобы обеспечить обзор в пределах 360°. Сканирование по азимуту осуществляется управлением по фазе передающими модулями 22, в частности, фазовращателями 24.
[0032] На примере, приведенном на Фиг. 7, сигнал 40, излучаемый передающей антенной 20, содержит десять одновременных направленных лучей 41 (следовательно, N=10), например, чтобы бистатической РЛС 1 осуществить одновременное отслеживание нескольких целей на средней дистанции (например, на дистанциях до порядка 30-40 км).
[0033] На вышеупомянутом рабочем режиме приемная антенна 30 и полностью цифровой диаграммообразующий блок 3 управляются планировщиком 2 активности РЛС для создания для каждых упомянутых N направленных передаваемых лучей 41 соответствующих нескольких М одновременных принимаемых лучей, где М - целое число больше единицы и меньше числа колонок 31 приемных модулей 32 или равно ему. Следовательно, полностью цифровой диаграммообразующий блок 3 предназначен для одновременного синтезирования М×N принимаемых лучей.
[0034] Согласно преимущественному варианту осуществления, каждые несколько М принимаемых лучей таковы, что они наводятся в направлении соответствующего направленного передаваемого луча 41 и образуются одной или несколькими соответствующими подрешетками колонок 31 приемных модулей 32, выбираемыми электронным способом и центрируемыми по азимуту относительно направления наведения соответствующего направленного передаваемого луча 41. Таким способом возможно с большим преимуществом избежать потерь при сканировании в горизонтальной плоскости. Вышеупомянутая подрешетка колонок 31 приемных модулей 32 может также иметь общие колонки 31, т.е. они могут быть частично наложенными друг на друга.
[0035] Также следует отметить, что на первом рабочем режиме бистатическая РЛС реализована так, чтобы осуществлять наблюдение и отслеживание, а блок 2 планировщика служит для управления передающей антенной 20, приемной антенной 30 и полностью цифровым диаграммообразующим блоком 3 с тем, чтобы электронным способом сканировать наблюдаемый сектор посредством упомянутых направленного передаваемого луча 41 и принимаемого луча, при этом азимутальное сканирование осуществляется электронным выбором упомянутых подрешеток колонок 21, 31 (передающих и приемных модулей), в то время как сканирование по углу возвышения осуществляется управлением фазой.
[0036] Согласно еще одному варианту осуществления, блок 2 планировщика активности РЛС выполнен с возможностью управления передающей антенной 20, приемной антенной 30 и полностью цифровым диаграммообразующим блоком 3 по второму рабочему режиму с выбором поочередно с первым. На втором рабочем режиме передающая антенна 20 управляется так, что выходной РЧ сигнал 40 обладает расфокусированной диаграммой 43 направленности излучения, имеющей полусферическую или практически полусферическую форму, как показано, например, на Фиг. 8. На конкретном примере, приведенном на Фиг. 8, диаграмма направленности излучения имеет форму с охватом по азимуту равным 360°, а по углу возвышения 70°, а также определяема в таком отношении, как практически полусферическая (омега-луч).
[0037] На втором рабочем режиме приемная антенна 30 управляется одновременным наведением одной или нескольких совокупностей М принимаемых лучей в одном или нескольких соответствующих направлениях, в которых отмечалось наличие цели. Преимущественно можно осуществлять с помощью бистатической РЛС 1 одновременное отслеживание множественных целей на малых дистанциях (например, на дистанциях до 10 км). В общем случае можно предусмотреть, чтобы на втором рабочем режиме бистатическая РЛС была реализована для выполнения:
- преследования цели или одновременного преследования нескольких целей;
- и/или направления дистанционно управляемого оружия или одновременного направления нескольких единиц дистанционно управляемого оружия;
- и/или нацеливания артиллерийской системы или одновременного нацеливания нескольких артиллерийских систем.
[0038] Согласно одному из вариантов осуществления, переход между первым рабочим режимом и вторым рабочим режимом и наоборот является постепенным, например, с постепенным расфокусированием направленных лучей 41, как показано на Фиг. 7, до тех пор, пока не будет получен передаваемый сигнал, имеющий диаграмму направленности излучения типа, приведенного на Фиг. 8.
[0039] Альтернативно или в дополнение ко второму рабочему режиму можно предусмотреть еще один рабочий режим, в котором передаваемый сигнал будет иметь диаграмму направленности излучения дискового профиля, с охватом по азимуту 360°, по амплитуде 5°-10° и переменным наведением по углу возвышения (луч 2 ). В этом случае принимаемые лучи, которые наводятся по всем направлениям так, чтобы полностью охватить передаваемый сигнал, синтезируются на приеме посредством цифрового диаграммообразующего блока.
). В этом случае принимаемые лучи, которые наводятся по всем направлениям так, чтобы полностью охватить передаваемый сигнал, синтезируются на приеме посредством цифрового диаграммообразующего блока.
[0040] На всех рабочих режимах, описанных выше, возможно сохранение радиолокационного эхо-сигнала в цифровой форме и обработка его с помощью полностью цифрового диаграммообразующего блока 3 в отложенный момент времени.
[0041] Это позволяет снизить число повторяющихся каналов (число которых в случае обработки в реальном масштабе времени равнялось бы числу принимаемых лучей), так как каждый канал может последовательно обрабатывать несколько принимаемых лучей с разным наведением, полученных в отложенный момент времени с помощью цифрового диаграммообразующего блока 3, обрабатывающего сохраненный радиолокационный эхо-сигнал. Так как передача мощности не требуется во время отложенной обработки, то в данном случае также получают снижение рабочего цикла передаваемого сигнала. Очевидно, данный рабочий режим определяет увеличение времени обновления радиолокационных данных и может, тем самым, применяться тогда, когда данный параметр не имеет значения для работы РЛС или когда он важен для сведения к минимуму времени передачи в целях снижения вероятности перехвата сигнала РЛС.
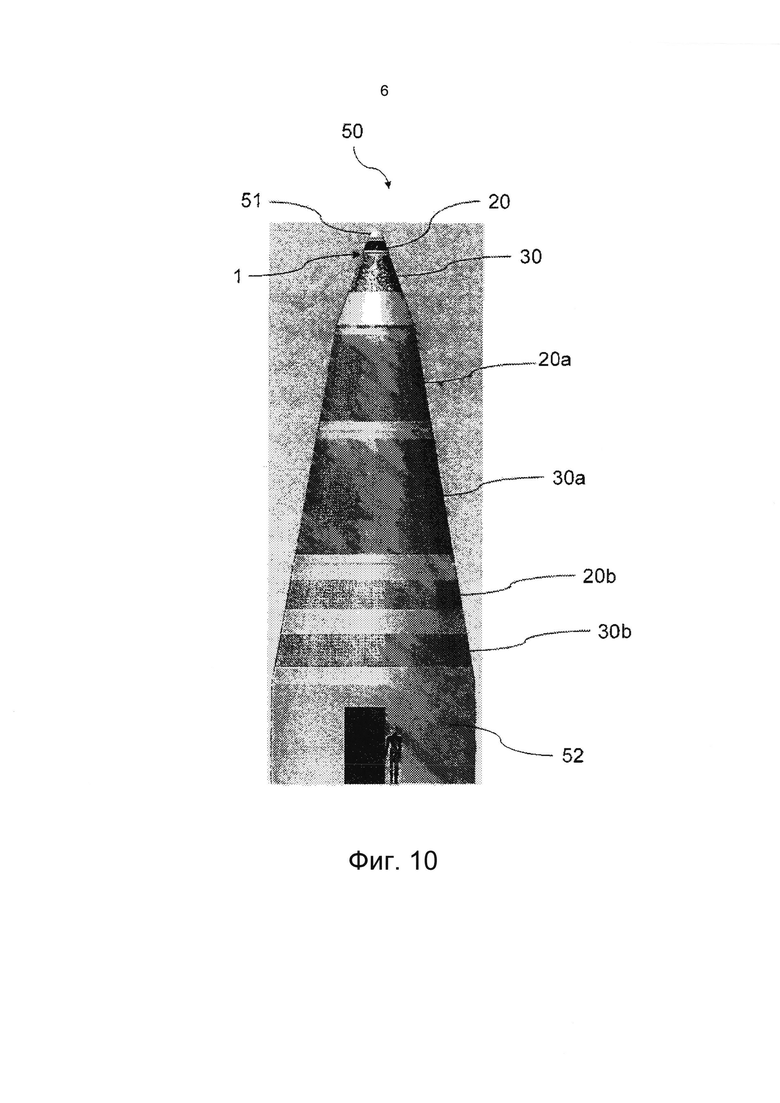
[0042] Как показано на примере, приведенном на Фиг. 10, возможно встроить одну или несколько бистатических РЛС, описанных выше, в корабельную мачту 50. Корабельная мачта 50 или по меньшей мере ее участок предпочтительно установлены на механически стабилизированной платформе.
[0043] Как показано на примере, приведенном на Фиг. 10, на вершине корабельной мачты имеется антенна радиоэлектронных средств наблюдения. Под ней на корабельной мачте 50 располагается передающая антенна 20 и приемная антенна 30 бистатической РЛС 1, описанной выше, например, работающей на частоте 10 ГГц.
[0044] Согласно одному из вариантов осуществления, корабельная мачта 50 содержит еще одну имеющую форму усеченного конуса передающую антенну 20а, аналогичную передающей антенне 20, описанной выше, и которая является, например, антенной средств радиоэлектронного подавления (РЭП), работающей в диапазоне частот 2-18 ГГц.
[0045] Согласно одному из вариантов осуществления, корабельная мачта 50 содержит еще одну имеющую форму усеченного конуса передающую антенну 20b, аналогичную передающей антенне 20, описанной выше, и которая является, например, двойной антенной, выполненной с возможностью выполнять функцию передающей антенны РЛС дальнего действия (работающей, например, на частоте 1,3 ГГц), а также функцию передающей антенны радиолокационной системы опознавания государственной принадлежности цели, работающей, например, на частоте 1,06 ГГц. В данном варианте осуществления корабельная мачта 50 дополнительно содержит следующее:
- еще одну имеющую форму усеченного конуса приемную антенну 30а, аналогичную приемной антенне 30, описанной выше, и которая, например, является приемной антенной вышеупомянутой РЛС дальнего действия, содержащей передающую антенну 20b;
- еще одну имеющую форму усеченного конуса приемную антенну 30b, аналогичную приемной антенне 30, описанной выше, и которая является, например, приемной антенной вышеупомянутой радиолокационной системы опознавания государственной принадлежности цели, содержащей передающую антенну 20b.
[0046] В основании корабельной мачты 50 может быть предусмотрено помещение управления для размещения в нем командно-управляющего пульта 7 согласно блок-схеме, приведенной на Фиг. 1, а также, возможно, другого программно-аппаратного комплекса, выполненного с возможностью обработки сигналов, связанных с работой передающей и приемной антенн, описанных выше.
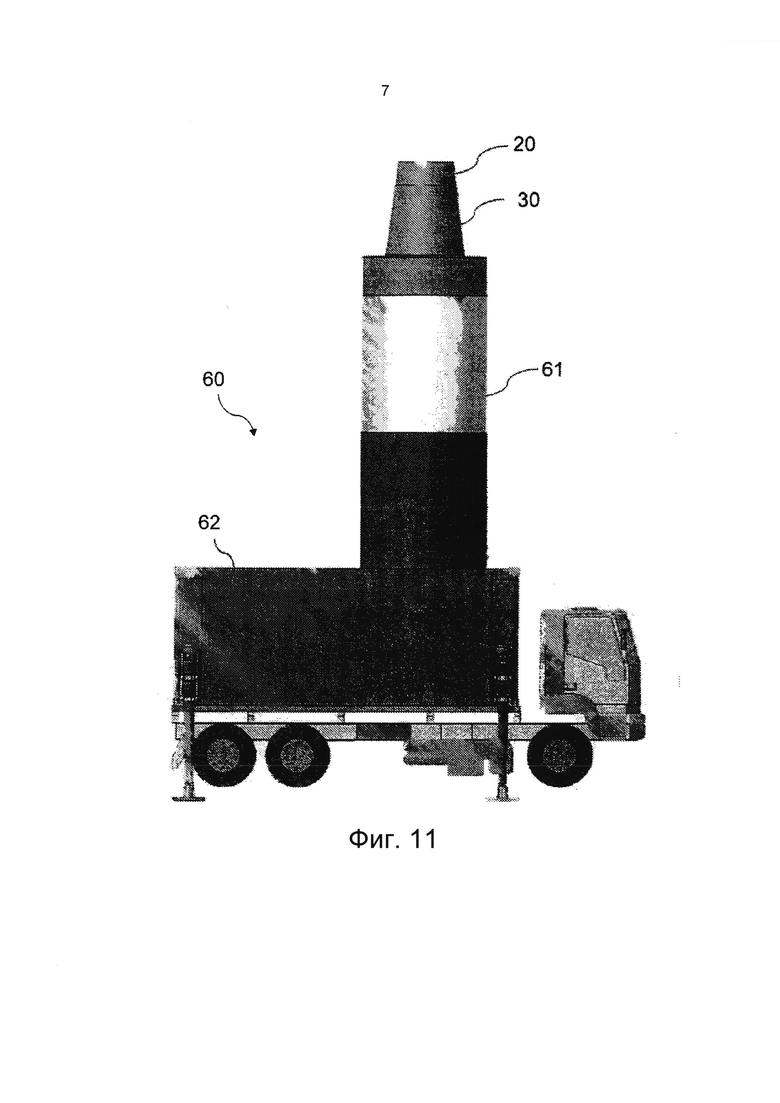
[0047] Из Фиг. 11 можно увидеть, что бистатическая РЛС 1 описанного выше типа может устанавливаться на борту сухопутного транспортного средства 60, например, в верхней части телескопической колонны 61. На конкретном приведенном примере вышеупомянутое сухопутное транспортное средство 60 - это грузовой автомобиль, оснащенный обитаемым контейнером, в котором расположен командно-управляющий пульт 7 согласно блок-схеме, представленной на Фиг. 1, а также, возможно, другой программно-аппаратный комплекс, выполненный с возможностью обработки сигналов, связанных с работой бистатической РЛС 1.
[0048] Из вышеприведенного описания очевидно, как бистатическая РЛС описанного выше типа позволяет достичь вышеупомянутых целей по сравнению с существующим уровнем техники.
[0049] Без ущерба принципу настоящего изобретения варианты осуществления и детали конструкции могут меняться в широком диапазоне относительно описанного и иллюстрируются чисто посредством неограничивающего примера, не уходя, следовательно, от объема изобретения, как определено в прилагаемой формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2017 |
|
RU2740218C2 |
| Радиолокационная система сопровождения низколетящих беспилотных летательных аппаратов и объектов | 2017 |
|
RU2737058C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2195683C2 |
| ОБЗОРНАЯ НАЗЕМНО-КОСМИЧЕСКАЯ РЛС | 2020 |
|
RU2742392C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ СТАНЦИЯ ПОМЕХ | 2012 |
|
RU2545168C2 |
| МОБИЛЬНАЯ ТРЕХКООРДИНАТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2594285C2 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РЛС ПО АЗИМУТУ И ДАЛЬНОСТИ И УМЕНЬШЕНИЯ ВРЕМЕНИ СКАНИРОВАНИЯ НАЗЕМНЫХ ОБЪЕКТОВ ПРИ ПОСАДКЕ САМОЛЕТА И ПРИЕМНОЕ УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 2018 |
|
RU2682169C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА С ЗАЩИТОЙ ОТ АКТИВНЫХ ШУМОВЫХ ПОМЕХ | 2006 |
|
RU2324198C1 |
| ГЛОБАЛЬНАЯ НАЗЕМНО-КОСМИЧЕСКАЯ СИСТЕМА ОБНАРУЖЕНИЯ ВОЗДУШНЫХ И КОСМИЧЕСКИХ ОБЪЕКТОВ | 2014 |
|
RU2578168C1 |
| НАЗЕМНЫЙ МАЛОГАБАРИТНЫЙ ТРАНСПОРТНЫЙ КОМПЛЕКС ДЛЯ ОСВЕЩЕНИЯ ПРИБРЕЖНОЙ ОБСТАНОВКИ | 2013 |
|
RU2538187C1 |
Изобретение относится к применению бистатических радиолокационных станций (БРЛС). Достигаемый технический результат – обнаружение объектов, контроль поверхностей, например, для выявления кораблей, контроль, воздушного пространства, возможность направления управляемых ракет, возможность управления артиллерийскими системами. Указанный результат достигается путем использования бистатической БРЛС, состоящей из активной передающей фазированной антенной решетки, выполненной с возможностью излучения радиочастотного выходного сигнала и содержащей цилиндрическую или коническую, либо имеющую форму усеченного конуса решетку из колонок активных передающих модулей; приемной антенны, содержащей решетку из колонок в форме усеченного конуса, приемных модулей, направленных по образующей усеченного конуса, при этом каждый приемный модуль включает в себя каскадом антенный элемент, аналоговый усилитель, аналого-цифровой преобразователь, выполненный с возможностью подавать на выход цифровые выборки; полностью цифровой диаграммообразующий блок, выполненный с возможностью принимать на входе упомянутые цифровые выборки и производить их числовую обработку. 4 н. и 13 з.п. ф-лы, 11 ил.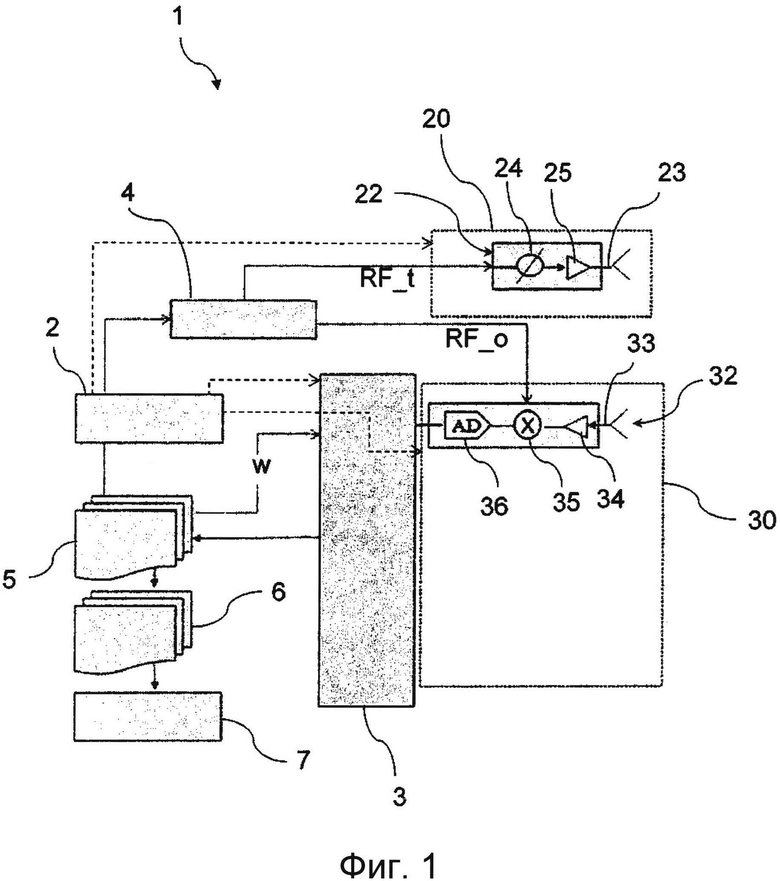
1. Бистатическая радиолокационная станция (РЛС) (1), содержащая:
- активную передающую фазированную антенную решетку (ФАР) (20), выполненную с возможностью излучения выходного радиочастотного (РЧ) сигнала (40) и содержащую цилиндрическую, коническую или имеющую форму усеченного конуса решетку колонок (21) активных передающих модулей (22);
- приемную антенну (30), содержащую имеющую форму усеченного конуса решетку колонок (31) приемных модулей (32), направленных по образующей усеченного конуса, при этом каждый приемный модуль (32) содержит каскадом приемный антенный элемент (33), аналоговый усилитель (34) и аналогово-цифровой преобразователь (АЦП) (36), выполненный с возможностью подавать на выход цифровые выборки;
- и полностью цифровой диаграммообразующий блок (3), выполненный с возможностью приема на входе и числовой обработки упомянутых цифровых выборок.
2. Бистатическая РЛС (1) по п. 1, в которой полностью цифровой диаграммообразующий блок (3) выполнен так, чтобы осуществлять числовую обработку цифровых выборок для цифрового синтезирования нескольких одновременных и независимых принимаемых лучей.
3. Бистатическая РЛС (1) по п. 1, содержащая блок (2) планировщика активности РЛС, выполненного с возможностью управления передающей антенной (20), приемной антенной (30) и полностью цифровым диаграммообразующим блоком (3) согласно первому рабочему режиму, при котором:
- передающая антенна (20) управляется так, что выходной РЧ сигнал (40) имеет N направленных передаваемых лучей (41), где N - целое число больше единице или равное ей, при этом в случае если N больше единицы, упомянутые лучи (41) являются одновременными, направление наведения и апертура каждого луча (41) могут управляться по углу возвышения и/или по азимуту блоком (2) планировщика, при этом каждый направленный передаваемый луч (41) создается соответствующей подрешеткой соседних колонок (21) передающих модулей (22), выбираемых электронным способом и центрируемых по азимуту относительно направления наведения соответствующего направленного передаваемого луча (41);
- приемная антенна (30) и полностью цифровой диаграммообразующий блок (3) управляются так, чтобы получить для каждых упомянутых N передаваемых лучей (41) соответствующие несколько М одновременных принимаемых лучей, где М - целое число больше единицы и меньше числа колонок (31) приемных модулей (32) или равно ему.
4. Бистатическая РЛС (1) по п. 3, в которой каждые несколько принимаемых лучей М:
- являются такими, чтобы осуществлялось наведение в направлении соответствующего направленного передаваемого луча (41);
- создаются одной или несколькими соответствующими подрешетками колонок (31) соответствующих модулей (32), выбираемыми электронным способом и центрируемыми по азимуту относительно направления наведения соответствующего направленного передаваемого луча (41).
5. Бистатическая РЛС (1) по п. 3, в которой блок (2) планировщика активности РЛС также выполнен с возможностью управления передающей антенной (20), приемной антенной (30) и полностью цифровым диаграммообразующим блоком (3) согласно второму рабочему режиму, выбираемому поочередно с первым, при этом:
- передающая антенна (20) управляется так, что выходной РЧ сигнал (40) имеет расфокусированную диаграмму (43) направленности излучения полусферической или практически полусферической формы;
- приемная антенна (30) управляется одновременно наведением одной или нескольких совокупностей М принимаемых лучей по одному или нескольким направлениям, в которых обозначено присутствие цели.
6. Бистатическая РЛС (1) по п. 3, в которой на первом рабочем режиме РЛС (1) выполнена с возможностью осуществлять наблюдение и отслеживание, при этом блок (2) планировщика управляет передающей антенной (20), приемной антенной (30) и полностью цифровым диаграммообразующим блоком (3) так, чтобы производить электронное сканирование наблюдаемого сектора посредством упомянутых направленных передаваемых и принимаемых лучей, при этом сканирование по азимуту осуществляется электронным выбором упомянутых подрешеток колонок, а сканирование по углу возвышения осуществляется управлением фазой.
7. Бистатическая РЛС (1) по п. 5, в которой на втором рабочем режиме бистатическая РЛС (1) выполнена с возможностью осуществлять следующее:
- преследование цели или одновременное преследование нескольких целей;
- и/или направление дистанционно управляемого оружия или одновременное направление нескольких единиц дистанционно управляемого оружия;
- и/или нацеливание артиллерийской системы или одновременное нацеливание нескольких артиллерийских систем.
8. Бистатическая РЛС (1) по любому из пп. 3-7, в которой каждый передающий модуль (22) содержит каскадом вход, выполненный с возможностью приема передаваемого модулированного РЧ сигнала (RF_t), фазовращатель (24), выполненный с возможностью осуществлять задержку фазы упомянутого модулированного сигнала (RF_t), усилитель мощности (25) и антенный элемент (23), при этом фазовращатель (25) выполнен так, чтобы принимать на входе цифровой сигнал управления, подаваемый на выход упомянутым блоком (2) планировщика, для управления фазовой задержкой, вводимой в упомянутый модулированный РЧ сигнал (RF_t).
9. Бистатическая РЛС (1) по п. 1, в которой передающая антенна (20) имеет форму усеченного конуса и в которой колонки (21) передающих модулей (22) направлены по образующей упомянутого усеченного конуса.
10. Бистатическая РЛС (1) по п. 9, в которой передающая антенна (20) и приемная антенна (30) наложены друг на друга коаксиально.
11. Бистатическая РЛС (1) по п. 10, в которой передающая антенна (20) и приемная антенна (30) вместе образуют конструкцию в форме усеченного конуса.
12. Бистатическая РЛС (1) по п. 1, в которой усеченный конус имеет телесный угол апертуры (α), заключенный между 10 и 60°, включая крайние значения.
13. Бистатическая РЛС (1) по п. 12, в которой упомянутый усеченный конус имеет телесный угол апертуры (α) равный или приблизительно равный 30°.
14. Бистатическая РЛС (1) по п. 1, в которой число приемных модулей (32) больше числа передающих модулей (22).
15. Корабельная мачта (50), содержащая по меньшей мере одну бистатическую РЛС (1) по любому из предыдущих пунктов.
16. Военный корабль, содержащий по меньшей мере одну бистатическую РЛС (1) по любому из пп. 1-14 или корабельную мачту по п. 15.
17. Сухопутное транспортное средство (60), содержащее по меньшей мере одну бистатическую РЛС (1) по любому из пп. 1-14.
| СПОСОБ КОНТРОЛЯ ВОЗДУШНОГО ПРОСТРАНСТВА, ОБЛУЧАЕМОГО ВНЕШНИМИ ИСТОЧНИКАМИ ИЗЛУЧЕНИЯ, И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2285939C1 |
| РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС | 2006 |
|
RU2324197C2 |
| СПОСОБ КОНТРОЛЯ ВОЗДУШНОГО ПРОСТРАНСТВА | 2001 |
|
RU2215303C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТА | 2005 |
|
RU2296343C1 |
| КОРАБЕЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2005 |
|
RU2293405C1 |
| US 6388603 B1, 14.05.2002 | |||
| JP 2000171544 A, 23.06.2000 | |||
| Индукционная тигельная печь | 1990 |
|
SU1814197A1 |

