Изобретение относится к измерительной технике, а именно к испытательному оборудованию, и может быть использовано в качестве устройства для проверки параметров, калибровки и климатических испытаний датчиков угловых скоростей, узлов и компонентов гироинерциальных систем (в дальнейшем при упоминании в тексте «ДУС»).
Известно устройство УПГ-56 для испытаний ДУС, обеспечивающее вращение рабочего стола в вертикальной и горизонтальной плоскостях (Установка УПГ-56 для проверки и испытания гироскопических приборов. Техническое описание и инструкция по эксплуатации 24.02.2009 г.).
Недостатками устройства УПГ-56 являются ограничение числа плоскостей вращения, отсутствие устройства устранения дисбаланса и невозможность климатических испытаний ДУС.
Известен динамический стенд (патент RU 2272256, 20.03.2006 г.), содержащий внутреннюю раму, которая с помощью валов установлена на внешней раме, закрепленной с возможностью вращения на основании. Для устранения дисбаланса вручную в устройстве используются балансировочные узлы, установленные на валах и внешней раме.
Недостатком устройства являются ограничение функциональных возможностей по числу осей вращения рабочего стола и невозможность обеспечить при испытаниях действие на ДУС отрицательных или положительных температур.
Известна испытательная поворотная платформа (патент на полезную модель №120216 RU, опубл. 10.09.2012 г.). На одном шпинделе устанавливаются рабочий стол и одна ведомая шестерня, приводимая во вращение одной или двумя шестернями, установленными на соответствующих двигателях.
Платформа не обеспечивает вращение вокруг трех взаимно перпендикулярных осей прямоугольной системы координат (в дальнейшем при упоминании в тексте «рабочих осей») и не может испытывать ДУС при отрицательных или положительных температурах. Устройство балансировки отсутствует.
Наиболее близким по технической сущности и достигаемому результату является трехосевой иммитатор движения серии 357-TCG производства ACUTRONIC, USA Inc (проспект фирмы ACUTRONIC - опубликован в 2011 г. ) - принят за прототип.
Рабочий стол трехосевого иммитатора движения, установленный на шпинделе, размещен внутри климатической камеры (в дальнейшем при упоминании в тексте «КК»), которая может вращаться в вертикальной плоскости с помощью первого двигателя, находящегося вне КК и установленного на одной из боковых стоек, закрепленных на общей плите. Плита вместе со стойками и КК может вращаться с помощью второго двигателя. Третий двигатель используется для вращения рабочего стола внутри КК.
Недостатками трехосевого иммитатора движения являются:
- необходимость использовать три двигателя, что усложняет конструкцию. К тому же третий двигатель расположен в верхней части конструкции и при его вращении с большим ускорением разгона требуется дополнительно увеличивать жесткость элементов конструкции, особенно основания. Это вносит усложнения в конструкцию и требует дополнительной площади для размещения боковых опор.
В частности, при диаметре рабочего стола 700 мм высота конструкции больше 3000 мм, ширина - больше 2500 мм.
Указанные недостатки приводят к тому, что увеличивается неравномерность вращения и погрешность поддержания угловой скорости вращения.
- При вращении рабочего стола вокруг двух из трех рабочих осей требуется вращать КК, а при ее сравнительно большой массе в режиме испытаний с большими ускорениями разгона требуется применять двигатели с большим пусковым моментом, тем самым еще больше усложняется конструкция и увеличивается стоимость устройства;
- Для вращающейся КК при испытаниях с отрицательными температурами необходимо использовать сжиженный газ, что усложняет систему создания и поддержания отрицательных температур и повышает требования безопасности при эксплуатации.
Задачей предлагаемого изобретения является создание устройства более простой конструкции с более высокой точностью поддержания угловой скорости вращения и уменьшением неравномерности вращения рабочего стола, с более низкими требованиями к безопасности и автоматизация балансировки.
Технический результат, который может быть получен при осуществлении предлагаемого изобретения, выражается в упрощении устройства, повышении его надежности, повышения точности и расширении технологических возможностей.
Указанный технический результат достигается тем, что в испытательном поворотном стенде, содержащем закрепленные на раме с вертикальными стойками блок управления, токосъемники, коллекторы и механизм балансировки, а также установленную на раме КК, в которой расположен рабочий стол, установленный на шпинделе, соединенном с первым двигателем, при этом на вертикальных стойках рамы установлены соосно два полых горизонтальных вала, один из которых соединен со вторым двигателем, к тому же к горизонтальным валам прикреплено по одной штанге, по которой может перемещаться груз, согласно изобретению первый двигатель соединен со шпинделем внутри КК, при этом шпиндель вместе с первым двигателем имеет возможность вращаться вокруг оси на горизонтальных валах, свободно проходящих через противоположные боковые стенки КК, неподвижной при вращении второго двигателя.
Указанный технический результат достигается также тем, что в испытательном поворотном стенде полости горизонтальных валов внутри КК герметично соединены с воздуховодом, внутри которого размещен первый двигатель, причем внешний конец одного горизонтального вала соединен с устройством подачи потока воздуха, который выходит через внешний конец второго горизонтального вала, при этом внешний конец второго горизонтального вала соединен трубопроводом с входом устройства подачи потока воздуха.
Указанный технический результат достигается также тем, что в испытательный поворотный стенд дополнительно введены трансформатор тока, сопротивление, аналого-цифровой преобразователь и двигатель для балансировки, при этом трансформатор тока индукционно связан с проводом питания второго двигателя, а к выводам трансформатора тока подключены сопротивление и вход аналого-цифрового преобразователя, выход которого подключен к входу схемы управления двигателем для балансировки, соединенной своим выходом с двигателем для балансировки, который имеет возможность перемещать груз по штанге.
Кроме того, данным пунктом формулы изобретения достигается дополнительный технический результат, а именно автоматическая балансировка становится возможной и при небольших угловых скоростях вращения, за счет чего при эксплуатации уменьшается нагрузка на опорные узлы в более расширенном диапазоне угловых скоростей вращения. Заявленная совокупность признаков обеспечивает вращение ДУС на рабочем столе вокруг каждой из трех рабочих осей двумя двигателями, а не тремя, как в прототипе.
За счет исключения в процессе вращения трансмиссии третьего двигателя и использования одних и тех же элементов схемы управления для вращения рабочего стола вокруг разных рабочих осей одним и тем же двигателем упрощается кинематика, исключаются причины, приводящие к нарушению динамики работы устройства при испытаниях ДУС.
Предлагаемое устройство позволяет испытывать ДУС большой массы при большом ускорении разгона и с большими угловыми скоростями вращения, так как рабочий стол укреплен непосредственно на валу двигателя, что исключает промежуточные механические узлы связи. Для уравновешивания вращающейся системы используется автоматическая балансировка. Указанные особенности устройства упрощают конструкцию по сравнению с аналогами. Использование двух двигателей уменьшает неравномерность вращения и погрешность поддержания угловой скорости вращения при обеспечении диапазона угловых скоростей вращения по требованиям методик испытаний ДУС.
В предложенном устройстве КК устанавливается неподвижно, что снижает требования по безопасности к части устройства, обеспечивающего создание и поддержание отрицательных температур, в частности, исключается необходимость, например, использовать способ охлаждения за счет испарения сжиженного газа, а это упрощает эксплуатацию оборудования. При размещении первого двигателя внутри КК температура собственного нагрева двигателя в процессе работы складывается с температурой внутри КК, что может привести к перегреву двигателя, а при испытаниях ДУС при отрицательных температурах на нагретой поверхности двигателя от холодного воздуха будет конденсироваться влага, что может привести к уменьшению прочности изоляции электрических цепей и, в конечном счете, к выходу механизма вращения из строя. В предлагаемом устройстве первый двигатель изолирован от воздуха в КК, так как он располагается внутри воздуховода, имеющего выход наружу через внутренние полости горизонтальных валов. Внутри воздуховода поток наружного воздуха, обтекая снаружи двигатель, обеспечивает его охлаждение. В аналогах неуравновешенная масса компенсируется перемещением грузов по штангам в статическом режиме. Такая методика балансировки требует повторения операций перемещения грузов после каждого регулировочного пуска. Так как количественная связь величины остаточного дисбаланса от перемещений груза не постоянная и зависит от испытуемого ДУС, установленного на рабочем столе, а встроенные средства контроля, как правило, отсутствуют, то величина остаточного дисбаланса остается значительной.
Также в известных аналогах для балансировки используются корректирующие грузы, которые за счет центробежной силы при разгоне рабочего стола с ДУС перемещаются, и неуравновешенная масса компенсируется. Однако перемещение корректирующих грузов зависит от ускорения разгона, при небольших ускорениях неуравновешенная масса компенсируется не полностью, что ведет к ухудшению характеристик испытательного оборудования: увеличивается погрешность поддержания скорости вращения и увеличивается износ опорных узлов.
Предлагаемая схема автоматического уравновешивания приводит к уменьшению дисбаланса и, следовательно, к снижению износа опор и уменьшению погрешности поддержания угловой скорости вращения.
На фиг. 1 показана функциональная схема испытательного поворотного стенда.
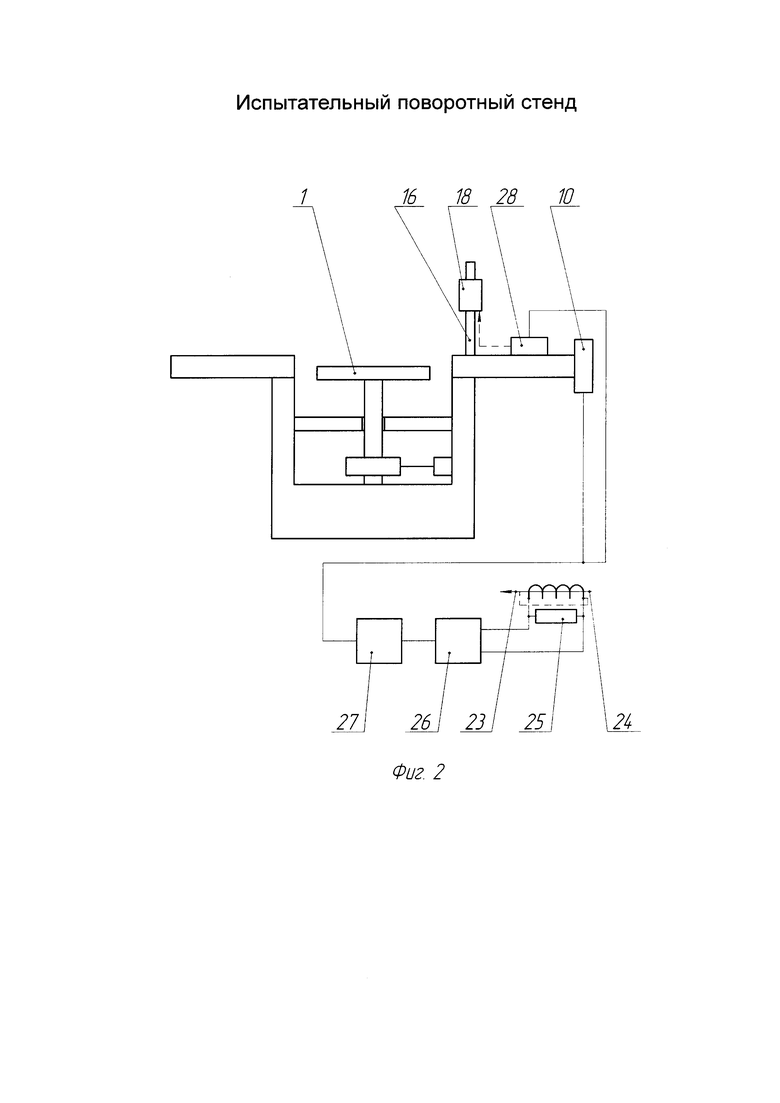
На фиг. 2 показана схема определения и компенсации неуравновешенной массы.
На фиг. 3 показана схема размещения ДУС на рабочем столе.
Предлагаемое устройство содержит рабочий стол 1 (фиг. 1), установленный на шпинделе 2, с которым соединен первый двигатель 3. Шпиндель 2 закреплен на двух горизонтальных валах 4, 5, имеющих внутреннюю полость для прохождения сигнальных и силовых линий связи, каждый из горизонтальных валов 4, 5 установлен на стойках 6, 7 соответственно, закрепленных вертикально на раме 8, на которой установлена КК 9, через противоположные боковые стенки которой проходят горизонтальные валы 4, 5 с возможностью их вращения. Шпиндель 2 вместе с рабочим столом 1 и первым двигателем 3 размещен в внутри КК 9 с возможностью вращения на горизонтальных валах 4, 5. Горизонтальный вал 5 соединен со вторым двигателем 10. На шпинделе 2 и горизонтальном валу 5 установлены коллекторы 11, 12, а контактирующие с ними токосъемники 13, 14 закреплены неподвижно относительно коллекторов 11, 12. Первый двигатель 3 и второй двигатель 10 соединены с блоком управления 15.
На каждом горизонтальном валу 4, 5 закреплены неподвижно по одной штанге 16, 17, которые расположены диаметрально противоположно шпинделю 2. На каждой штанге 16, 17 размещено по одному набору грузов 18, 19 с возможностью перемещения и фиксации на штанге. Устройство содержит дополнительно воздуховод 20, соединенный герметично с внутренними полостями горизонтальных валов 4, 5 внутри КК 9. Внутри воздуховода 20 размещен первый двигатель 3. К внешнему концу одного горизонтального вала подключен выход устройства 21 подачи потока воздуха, а внешний конец второго горизонтального вала соединен трубопроводом 22 со входом устройства подачи потока воздуха.
Устройство содержит дополнительно трансформатор тока 23 (фиг. 2), индукционно связанный с проводом питания 24 второго двигателя 10 (фиг. 1). К выводам трансформатора тока 23 (фиг. 2) параллельно присоединены сопротивление 25 и вход аналого-цифрового преобразователя 26, к выходу которого присоединен вход схемы управления 27, присоединенной к двигателю для балансировки 28, имеющего возможность перемещать груз 18 (фиг. 1) по штанге 17.
Устройство работает следующим образом. Устанавливают ДУС на рабочий стол 1 (фиг. 1), симметрично относительно оси вращения и перпендикулярно плоскости рабочего стола 1 так, чтобы ДУС относительно рабочих осей был сориентирован согласно фиг. 3. Для предварительной балансировки при выключенных двигателях 3, 10 (фиг. 1) на штангах 16, 17 перемещают грузы 18, 19 так, чтобы система, содержащая ДУС (фиг. 3), рабочий стол 1 (фиг. 1), грузы 18, 19, первый двигатель 3, шпиндель 2, была сбалансирована статически относительно оси вращения горизонтальных валов 4, 5.
Задают необходимую для испытаний температуру в КК 9. С помощью блока управления 15 задают угловую скорость и направление вращения первого двигателя 3 и запускают двигатель 3. В результате рабочий стол 1 и ДУС на нем вращаются вокруг оси ОУ (фиг. 3). Сигналы управления первым двигателем 3 (фиг. 1) с блока управления 15 и сигналы обмена ДУС (фиг. 3) с выходной контрольно-измерительной аппаратурой подаются через коллекторы 11, 12 и токосъемники 13, 14. Затем выключают первый двигатель 3. С помощью блока управления 15 задают угловую скорость и направление вращения второму двигателю 10. В результате рабочий стол 1 и ДУС (фиг. 3) на нем будут вращаться на горизонтальных валах 4, 5 вокруг оси ОХ (фиг. 3). Выключают второй двигатель 10 (фиг. 1) и с помощью блока управления 15 первым двигателем 3 поворачивают рабочий стол 1 на 90 градусов в горизонтальной плоскости против часовой стрелки. При этом ось вращения горизонтальных валов 4, 5 будет совпадать с осью координат OZ (фиг. 3). Затем с помощью блока управления 15 (фиг. 1) задают направление и угловую скорость вращения второму двигателю 10. В результате рабочий стол 1 (фиг. 1) и ДУС (фиг. 3) на нем будут вращаться вокруг оси OZ (фиг. 3).
Таким образом, в предлагаемом устройстве осуществляется вращение в любую сторону вокруг любой из трех рабочих осей при воздействии положительных или отрицательных температур. При одновременной работе первого и второго двигателя рабочий стол может вращаться одновременно в двух плоскостях.
Для уменьшения влияния температуры в КК 9 (фиг. 1) через первый двигатель 3 по воздуховоду 20 от устройства подачи потока воздуха (не показано) поступает поток наружного воздуха с расходом, зависящим от температуры в КК 9. Конец горизонтального вала соединен с устройством подачи потока воздуха трубопроводом 22. В результате поток воздуха движется по замкнутой цепи.
Ток по проводу питания 22 (фиг. 2) двигателя зависит от степени неуравновешенности массы. Опорным значением тока при уравновешивании массы является ток Jo. Определяя с помощью трансформатора тока 21 (фиг. 2) ток Jn при вращении вокруг оси ОХ (фиг. 3), находят разность токов Δ=Jn - Jo, а напряжение сопротивления 23 (фиг. 2), пропорциональное разности токов Δ, с помощью аналого-цифрового преобразователя 24 преобразуют в цифровой код, поступающий на управляющий привод 25, с помощью которого двигатель для балансировки 26 перемещает по штанге 16 (фиг. 1) груз 18 до минимизации величины Δ.
Испытательный поворотный стенд, реализующий данное изобретение, позволяет контролировать параметры ДУС при температуре от -70 до +120 градусов Цельсия с ускорением до 1000 угловых градусов/с2 вокруг трех ортогональных осей прямоугольной системы координат. При этом точность поддержания угловой скорости вращения повышается на 10%, а требуемая площадь для размещения уменьшается на 15%.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХОСНЫЙ ПОВОРОТНЫЙ СТЕНД | 2018 |
|
RU2684419C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2017 |
|
RU2669263C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |
| СПОСОБ ОТРАБОТКИ СИСТЕМ УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ КОСМИЧЕСКИХ АППАРАТОВ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2004 |
|
RU2271971C1 |
| УСТАНОВКА ЦЕНТРОБЕЖНАЯ | 2003 |
|
RU2249801C1 |
| СПОСОБ И УСТРОЙСТВО КАЛИБРОВКИ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ МОДУЛЕЙ | 2015 |
|
RU2602736C1 |
| ОРБИТАЛЬНЫЙ ШЕЙКЕР | 2024 |
|
RU2823279C1 |
| ПОВОРОТНЫЙ СТОЛ | 2004 |
|
RU2262077C1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2656263C1 |


Изобретение относится к измерительной технике, а именно к испытательному оборудованию, и может быть использовано в качестве устройства для проверки параметров, калибровки и климатических испытаний датчиков угловых скоростей, узлов и компонентов гироинерциальных систем. Испытательный поворотный стенд содержит закрепленные на раме с вертикальными стойками блок управления, токосъемники, коллекторы и механизм балансировки, а также установленную на раме климатическую камеру, в которой расположен рабочий стол, установленный на шпинделе, соединенном с первым двигателем. На вертикальных стойках рамы установлены соосно два полых горизонтальных вала, один из которых соединен со вторым двигателем, к тому же к горизонтальным валам прикреплено по одной штанге, по которой может перемещаться груз. При этом первый двигатель соединен со шпинделем внутри климатической камеры, при этом шпиндель вместе с первым двигателем имеет возможность вращаться вокруг оси на горизонтальных валах, свободно проходящих через противоположные боковые стенки климатической камеры, неподвижной при вращении второго двигателя. Технический результат – повышение точности поддержания угловой скорости вращения и уменьшение неравномерности вращения, упрощение конструкции, а также уменьшение площади для размещения устройства. 2 з.п. ф-лы, 3 ил.
1. Испытательный поворотный стенд, содержащий закрепленные на раме с вертикальными стойками блок управления, токосъемники, коллекторы и механизм балансировки, а также установленную на раме климатическую камеру, в которой расположен рабочий стол, установленный на шпинделе, соединенном с первым двигателем, при этом на вертикальных стойках рамы установлены соосно два полых горизонтальных вала, один из которых соединен со вторым двигателем, к тому же к горизонтальным валам прикреплено по одной штанге, по которой может перемещаться груз, отличающийся тем, что первый двигатель соединен со шпинделем внутри климатической камеры, при этом шпиндель вместе с первым двигателем имеет возможность вращаться вокруг оси на горизонтальных валах, свободно проходящих через противоположные боковые стенки климатической камеры, неподвижной при вращении второго двигателя.
2. Устройство по п. 1, отличающееся тем, что полости горизонтальных валов внутри климатической камеры герметично соединены с воздуховодом, внутри которого размещен первый двигатель, причем внешний конец одного горизонтального вала соединен с устройством подачи потока воздуха, который выходит через внешний конец второго горизонтального вала, при этом внешний конец второго горизонтального вала соединен трубопроводом со входом устройства подачи потока воздуха.
3. Устройство по п. 1, отличающееся тем, что в него дополнительно введены трансформатор тока, сопротивление, аналого-цифровой преобразователь и двигатель для балансировки, при этом трансформатор тока индукционно связан с проводом питания второго двигателя, а к выводам трансформатора тока подключены сопротивление и вход аналого-цифрового преобразователя, выход которого подключен к входу схемы управления двигателем для балансировки, соединенной выходом с двигателем для балансировки, который имеет возможность перемещать груз по штанге.
| Способ получения смеси несимметричных тетраалкилдитиопирофосфатов и триалкилдитиофосфатов | 1958 |
|
SU120216A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕМПЕРАТУРНЫХ ЗАВИСИМОСТЕЙ МАСШТАБНЫХ КОЭФФИЦИЕНТОВ, СМЕЩЕНИЙ НУЛЯ И МАТРИЦ ОРИЕНТАЦИИ ОСЕЙ ЧУВСТВИТЕЛЬНОСТИ ЛАЗЕРНЫХ ГИРОСКОПОВ И МАЯТНИКОВЫХ АКСЕЛЕРОМЕТРОВ В СОСТАВЕ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА ПРИ СТЕНДОВЫХ ИСПЫТАНИЯХ | 2014 |
|
RU2566427C1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ БЛОКОВ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ГИРОСКОПОВ И АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2256880C1 |
| US 8661872 B2, 04.03.2014 | |||
| US 20090326851 A1, 31.12.2009. | |||

