Изобретение относится к области гидроакустических измерений, а именно к способам и устройствам измерения шумности морских судов.
Под шумностью морского судна понимается приведённый к расстоянию 1 м от него частотный спектр его шумоизлучения (в третьоктавных либо узких, как правило, одногерцовых полосах) при движении в конкретном положении (надводном, перископном либо подводном) и на конкретной скорости. Часто шумность кораблей и подводных лодок описывается более компактной характеристикой - уровнем шумоизлучения, приведённым к частоте 1 кГц, полосе 1 Гц и расстоянию 1 м от судна. Шумность измеряется в паскалях либо в децибелах относительно некоторого референтного уровня (в России за референтный уровень принят порог слышимости человека - 20 мкПа).
Измерению шумности подвергаются все военные корабли и подводные лодки, поскольку шумность определяет дистанцию обнаружения судна гидроакустическими средствами противника и потому она должна нормироваться заданными предельными уровнями.
Способам измерения шумности посвящено большое количество патентов, например [1 - 9]. Но все они сводятся к измерению приёмной системой с калиброванным приёмным трактом спектра шумоизлучения судна, проходящего мимо приёмника на контролируемой дистанции, с последующим приведением измеренного спектра к расстоянию 1 м (в некоторых случаях 50 м). Ввиду этого различные известные способы различаются между собой типом используемой приёмной системы и/или способом определения расстояния между судном и приёмной системой.
В работе [1] описаны способы измерения шумности ПЛ и НК на специальных полигонах с использованием приёмной системы с одиночным измерительным гидрофоном либо с лежащей на дне или вертикальной линейной антенной, а также с использованием сложного оборудования для контроля расстояния между антенной и судном.
Способ, описанный в [2], предусматривает измерение шумности ПЛ при помощи гибкой протяжённой буксируемой антенны (ГПБА). Новизна способа состоит в повышении точности измерения спектра шумоизлучения ПЛ-буксировщика ГПБА путём его сравнения со спектром специально излучаемого калиброванного сигнала.
Согласно способу, описанному в [3], измерение шумности ПЛ осуществляется также при помощи ГПБА. Новизна способа состоит в повышении точности измерения за счёт усреднения спектров ПЛ-буксировщика, измеренных разными приёмниками ГПБА.
В [4, 5] описан способ измерения шумности ПЛ при помощи ГПБА, буксируемой другой ПЛ.
В [6] описано развитие способа измерения шумности ПЛ при помощи ГПБА, буксируемой другой ПЛ. Новизна состоит в том, что ПЛ-измеритель зависает на определённой глубине, в результате чего ГПБА в силу положительной плавучести занимает вертикальное положение. Это позволяет добиться высокого разрешения в вертикальной плоскости и тем самым отстроиться от сигнальных лучей, отражённых от поверхности моря, вносящих искажения в измеряемый спектр шумоизлучения ПЛ.
В [7] описан способ измерения шумности судна с использованием лазерного гидрофона.
В [8] описан способ измерения расстояния между судном и приёмной системой на основе динамики доплеровской частоты стабильной узкополосной дискретной составляющей в спектре шумоизлучения судна.
В [9] описан способ измерения шумности судна с использованием комбинированного (векторно-скалярного) приёмника, расположенного неподвижно на дне водоёма.
В качестве прототипа выберем способ, описанный в [1]. Способ-прототип реализуется на специальном полигоне, оборудованном гидроакустической приёмной системой с ненаправленным калиброванным гидрофоном и системой измерения дистанции (СИД) между приёмной системой и измеряемым судном. СИД состоит из совмещённого с приёмной системой излучателя, излучающего широкополосные гидроакустические сигналы, и приёмной аппаратуры, временно устанавливаемой на измеряемое судно. Приёмная система, а также излучатель и приёмная аппаратура СИД оборудованы часами, синхронизированными с точностью в доли миллисекунды. Измерение шумности должно проводиться при волнении моря не более 1 балла, чтобы шум моря не вносил ощутимого вклада в принимаемый приёмной системой шум судна.
Способ-прототип включает следующие действия:
1) Измеряемое судно (ПЛ в подводном положении либо НК) заданным постоянным курсом с постоянной заданной скоростью  двигается мимо гидроакустической антенны приёмной системы. Кратчайшее расстояние между гидроакустической антенной приёмной системы и судном не превышает 100 м.
двигается мимо гидроакустической антенны приёмной системы. Кратчайшее расстояние между гидроакустической антенной приёмной системы и судном не превышает 100 м.
2) В процессе движения судна приёмная система принимает шум, излучаемый судном, и записывает его в память своего вычислителя с привязкой ко времени.
3) В процессе движения судна приёмник СИД в фиксированные моменты времени излучает импульсные сигналы, которые принимает приёмная аппаратура СИД, временно установленная на судне, с фиксацией в памяти своего вычислителя времени приёма каждого сигнала. Период излучения сигналов СИД превышает время распространения сигнала на максимально возможное расстояние между приёмной системой и судном, что обеспечивает однозначную привязку принятого сигнала к излучённому.
4) По завершении движения судна мимо приёмной системы выполняется обработка записанных в памяти процессора приёмной системы принятого шумового сигнала судна и записанного в памяти приёмной аппаратуры СИД моментов времени приёма излучённых сигналов СИД. Первый этап обработки состоит в вычислении последовательности привязанных ко времени узкополосных (как правило, с полосой 1 Гц) энергетических спектров шума судна  , В2, (где
, В2, (где  - частота
- частота  -й составляющей спектра) и сопоставлении с каждым
-й составляющей спектра) и сопоставлении с каждым  -м спектром расстояния
-м спектром расстояния  , м, между приёмной системой и судном. Расстояние определяется путём умножения скорости звука на глубине гидроакустической антенны приёмной системы на разность времён приёма и излучения соответствующего импульсного сигнала СИД.
, м, между приёмной системой и судном. Расстояние определяется путём умножения скорости звука на глубине гидроакустической антенны приёмной системы на разность времён приёма и излучения соответствующего импульсного сигнала СИД.
5) На втором этапе обработки с использованием каждого  -го энергетического спектра, измеренного в -й момент времени, осуществляется вычисление уровней шумоизлучения судна в третьоктавных фильтрах, приведённых к расстоянию 1 м:
-го энергетического спектра, измеренного в -й момент времени, осуществляется вычисление уровней шумоизлучения судна в третьоктавных фильтрах, приведённых к расстоянию 1 м:
где
 - уровень шумоизлучения судна в
- уровень шумоизлучения судна в  -м третьоктавном фильтре, измеренный в -й момент времени и приведённый к расстоянию 1 м;
-м третьоктавном фильтре, измеренный в -й момент времени и приведённый к расстоянию 1 м;
 - передаточная характеристика приёмного тракта приёмника, соответствующая -му третьоктавному фильтру, В/Па;
- передаточная характеристика приёмного тракта приёмника, соответствующая -му третьоктавному фильтру, В/Па;
 - минимальный и максимальный номера спектральных составляющих узкополосного энергетического спектра , принадлежащих
- минимальный и максимальный номера спектральных составляющих узкополосного энергетического спектра , принадлежащих  -му третьоктавному фильтру (границы третьоктавных фильтров приведены в ГОСТ 17168-82).
-му третьоктавному фильтру (границы третьоктавных фильтров приведены в ГОСТ 17168-82).
6) На третьем этапе обработки осуществляется усреднение уровней  , полученных с использованием нескольких (до 20-ти) энергетических спектров , измеренных на интервале времени прохождения судном кратчайшего расстояния от приёмной системы:
, полученных с использованием нескольких (до 20-ти) энергетических спектров , измеренных на интервале времени прохождения судном кратчайшего расстояния от приёмной системы:

где
 - усреднённый уровень шумоизлучения судна в -м третьоктавном фильтре, приведённый к расстоянию 1 м;
- усреднённый уровень шумоизлучения судна в -м третьоктавном фильтре, приведённый к расстоянию 1 м;
 - начальный и конечный номера усредняемых уровней
- начальный и конечный номера усредняемых уровней  .
.
Описанный способ-прототип широко применяется на практике. Вместе с тем он имеет ряд недостатков в случае измерения шумностей обитаемых и необитаемых подводных аппаратов (ПА):
1) Для реализации способа требуется специально оборудованный полигон. Таких полигонов в стране несколько и все они располагаются вблизи крупных судостроительных заводов. В результате требуется организация дорогостоящей специальной доставки на эти полигоны ПА, изготавливаемых, как правило, на других предприятиях.
2) Измеряемое судно должно временно оборудоваться приёмной аппаратурой СИД, что в случае ПА (особенно необитаемых) весьма затруднительно.
3) ПА имеют низкую шумность, на которую не рассчитаны имеющиеся полигоны, использующие в качестве гидроакустической антенны ненаправленный гидрофон..
Решаемая техническая проблема - совершенствование способов измерения шумности морских судов.
Технический результат - обеспечение высокой точности измерения шумности ПА вне специально оборудованных полигонов.
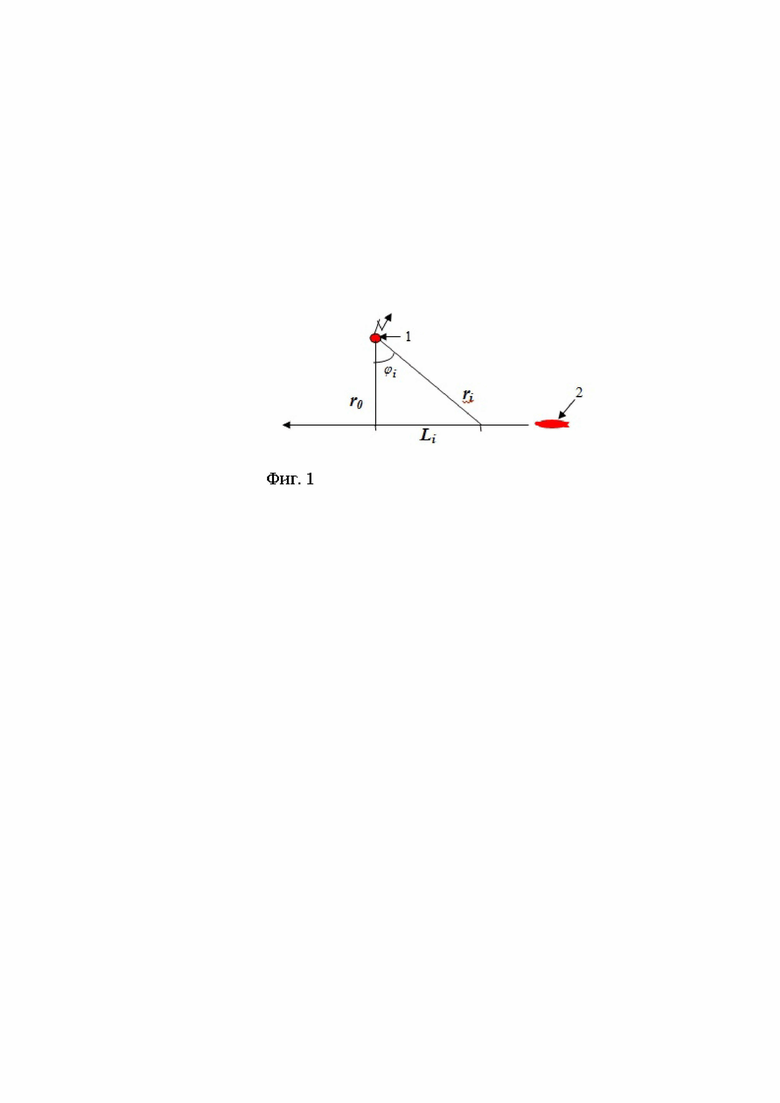
Заявляемый технический результат достигается тем, что для измерения шумности ПА используется временный полигон (фиг.1) с глубиной не менее 30 м, оборудованный заякоренным радиогидроакустическим буем (РГБ) 3 с направленной гидроакустической антенной и калиброванным приёмным трактом. Направленная гидроакустическая антенна позволяет повысить помехоустойчивость приёма шума малошумных ПА, а также измерять пеленги ПА при его проходе мимо РГБ, что обеспечивает определение расстояния между ПА и приёмной системой без дооборудования ПА специальной аппаратурой СИД.
Антенна РГБ должна быть заглублена не менее чем на 10 м. Измерение шумности должно проводиться при волнении моря не более 1 балла, чтобы шум моря не вносил ощутимого вклада в принимаемый РГБ шум ПА.
Сущность предлагаемого способа заключается в следующем (фиг.1):
1) ПА 2 в подводном положении с постоянной заданной скоростью  движется к РГБ 1 постоянным курсом, обеспечивающим прохождение мимо РГБ на расстоянии не более 10 м.
движется к РГБ 1 постоянным курсом, обеспечивающим прохождение мимо РГБ на расстоянии не более 10 м.
2) В процессе движения ПА РГБ 1 принимает шум ПА и записывает его в память своего процессора с привязкой ко времени.
3) Одновременно РГБ 1 периодически с периодом в несколько секунд измеряет и запоминает с привязкой ко времени  пеленга ПА
пеленга ПА  . Если вследствие низкой шумности ПА его пеленгование РГБ на протяжении всего маршрута не представляется возможным, ПА периодически с периодом в единицы секунд излучает сигналы гидролокатором, по которым РГБ осуществляет пеленгование ПА.
. Если вследствие низкой шумности ПА его пеленгование РГБ на протяжении всего маршрута не представляется возможным, ПА периодически с периодом в единицы секунд излучает сигналы гидролокатором, по которым РГБ осуществляет пеленгование ПА.
4) По завершении измерений выполняется обработка записанных в памяти процессора РГБ шумового сигнала ПА и массива пеленгов ПА. Первый этап обработки состоит в вычислении последовательности привязанных ко времени узкополосных (с полосой 1 Гц) энергетических спектров шума ПА , В2, и сопоставлении с каждым -м спектром расстояния , вычисляемого по формуле (см. фиг.1)

где
- расстояние между ПА и РГБ в момент времени  , м;
, м;
 - расстояние проходимое ПА за время
- расстояние проходимое ПА за время  , м;
, м;
 - момент времени прохождения кратчайшего расстояния между ПА и РГБ, с;
- момент времени прохождения кратчайшего расстояния между ПА и РГБ, с;
 - известная (заданная) скорость ПА, м/с
- известная (заданная) скорость ПА, м/с
 - кратчайшее расстояние между ПА и РГБ, м.
- кратчайшее расстояние между ПА и РГБ, м.
Способ вычисления и описан ниже.
5) На втором этапе обработки с использованием каждого -го энергетического спектра по формуле (1) осуществляется вычисление уровней шумоизлучения ПА в третьоктавных фильтрах  , приведённых к расстоянию 1 м.
, приведённых к расстоянию 1 м.
6) На третьем этапе обработки по формуле (2) осуществляется усреднение уровней , полученных с использованием нескольких (до 20-ти) энергетических спектров , измеренных на интервале времени прохождения ПА кратчайшего расстояния от РГБ.
Остановимся на способе вычисления входящих в формулу (3) кратчайшего расстояния между ПА и РГБ и момента времени прохождения кратчайшего расстояния между ПА и РГБ .
Из прямоугольного треугольника на фиг.1 следует:

где
 - угол между пеленгами ПА в моменты времени
- угол между пеленгами ПА в моменты времени  и , град;
и , град;
 - значение пеленга ПА, измеренного в момент времени , град;
- значение пеленга ПА, измеренного в момент времени , град;
 - пеленг ПА в момент времени прохождения кратчайшего расстояния между ПА и РГБ, град.
- пеленг ПА в момент времени прохождения кратчайшего расстояния между ПА и РГБ, град.
Неизвестными в уравнении (4) являются 3 переменные - , и . Для их определения воспользуемся методом наименьших квадратов, который состоит в нахождении значений переменных , и , соответствующих минимуму функции  , определяемой по формуле
, определяемой по формуле

где
 - количество измеренных пеленгов ПА.
- количество измеренных пеленгов ПА.
Решение (5) будем осуществлять следующим образом:
- определяются начальные приближения искомых величин , и . Для этого строится зависимость скорости изменения пеленга ПА от времени. Точка максимума этой зависимости принимается за момент прохождения кратчайшего расстояния. Соответствующие этой точке значения переменных  и
и  принимаются за начальное приближение переменных и ;
принимаются за начальное приближение переменных и ;
- подставляя в формулу (3) для любого  начальные приближения параметров и , определяется начальное приближение переменной ;
начальные приближения параметров и , определяется начальное приближение переменной ;
- вокруг начальных приближений переменных , и формируются малые интервалы, в которых методом перебора определяются значения переменных , и , обеспечивающие минимум функции (5).
Точность определения переменных , и зависит от точности измерения пеленгов ПА и количества измеренных пеленгов. Проведённое моделирование показало, что при среднеквадратической погрешности (СКП) пеленгования 2°, обеспечиваемой РГБ, относительная СКП оценки расстояния между ПА и РГБ не превышает 20% уже при обработке 15-ти пеленгов.
Отличительными признаками заявляемого способа являются:
- использование вместо стационарной приёмной системы с ненаправленным гидрофоном временно устанавливаемых в районе базирования ПА РГБ с направленной антенной, применение которой позволяет повысить помехоустойчивость приёмного тракта, что важно при измерении шумности малошумных ПА;
- вместо использования специальной СИД, требующей дооборудования ПА приёмником сигналов СИД, определение дистанции между ПА и приёмной системой по динамике изменения пеленга ПА при известной скорости ПА, что не требует дооборудования ПА.
Определим точность измерения шумности ПА предложенным способом.
Поскольку относительные среднеквадратические погрешности (СКП) оценок сомножителей в правой части формулы (1) малы, то согласно [10]
где  - дисперсии в
- дисперсии в  -й момент времени соответственно оценок уровня шумоизлучения ПА в -м третьоктавном фильтре, приведённого к расстоянию 1 м, расстояния между ПА и РГБ и уровня в третьоктавном фильтре до приведения в расстоянию 1 м.
-й момент времени соответственно оценок уровня шумоизлучения ПА в -м третьоктавном фильтре, приведённого к расстоянию 1 м, расстояния между ПА и РГБ и уровня в третьоктавном фильтре до приведения в расстоянию 1 м.
Учитывая, что дисперсия спектральной составляющей равна квадрату самой спектральной составляющей, из (6) получим:

Т.е. соответствующая  -му моменту времени относительная СКП оценки приведённого к расстоянию 1 м уровня шумоизлучения ПА в -м третьоктавном фильтре равна относительной СКП оценки расстояния между ПА и РГБ на тот же момент времени.
-му моменту времени относительная СКП оценки приведённого к расстоянию 1 м уровня шумоизлучения ПА в -м третьоктавном фильтре равна относительной СКП оценки расстояния между ПА и РГБ на тот же момент времени.
При усреднении оценок по формуле (2) формула (7) принимает вид:

Как выше было показано, относительная СКП оценки расстояния между ПА и РГБ не превышает 20%. Если принять, что усреднению по формуле (5) подвергается 20 оценок уровней в третьоктавных фильтрах, можно сделать вывод, что относительная СКП оценок уровней шумоизлучения в третьоктавных фильтрах не будет превышать 5% или 0,5 дБ. В большинстве практических случаев требуется измерять шумность объектов со СКП не более 1…2 дБ [11].
Поскольку предлагаемый способ не требует специально оборудованного полигона и обеспечивает высокую точность измерения шумности ПА, можно утверждать, что технический результат - обеспечение высокой точности измерения шумности ПА вне специально оборудованных полигонов - достигнут.
Источники информации:
1. Урик Р. Дж. Основы гидроакустики // Л.: Судостроение. 1978.
2. Авторское свидетельство РФ №1840366.
3. Авторское свидетельство РФ №1840507.
4. Патент США 3659256.
5. Гурвич А.А., Гусев Н.М., Яковлев Г.В. Гидроакустические системы с гибкими протяжёнными гидроакустическими антеннами // Судостроение за рубежом. 1984. №10 (24).
6. Авторское свидетельство РФ №1840512.
7. Патент РФ №2167500.
8. Патент РФ №2284484.
9. Патент РФ №2284485.
10. Вентцель Е.С., Овчаров Л.А. Теория вероятностей и её инженерные приложения // М.: Наука. 1988. с.273
11. Данилов В.Н., Грушин А.А. Специальное метрологическое обеспечение гидроакустических средств // Петродворец. 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ калибровки лага, установленного на подводном аппарате | 2023 |
|
RU2800186C1 |
| Способ определения координат и параметров движения подводных объектов при мультистатической гидролокации | 2024 |
|
RU2830066C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОДВОДНОЙ ШУМНОСТИ КОРАБЛЯ-ЦЕЛИ | 1989 |
|
SU1840512A1 |
| СПОСОБ ИЗМЕРЕНИЯ СОБСТВЕННОГО ПОДВОДНОГО ШУМОИЗЛУЧЕНИЯ И ШУМОИЗМЕРИТЕЛЬ | 1989 |
|
SU1840603A1 |
| Способ классификации шумоизлучения морского объекта | 2021 |
|
RU2776958C1 |
| Шумопеленгаторная станция для подводной лодки | 2022 |
|
RU2791851C1 |
| Способ обсервации подводного аппарата | 2021 |
|
RU2763114C1 |
| СПОСОБ ИЗМЕРЕНИЯ ШУМОИЗЛУЧЕНИЯ КОРАБЛЯ | 1986 |
|
SU1840507A1 |
| Способ определения класса шумящего морского объекта | 2021 |
|
RU2760912C1 |
| СПОСОБ ОБРАБОТКИ И ОТОБРАЖЕНИЯ СИГНАЛОВ В ГИДРОАКУСТИЧЕСКОЙ СТАНЦИИ С ГИБКОЙ ПРОТЯЖЁННОЙ БУКСИРУЕМОЙ АНТЕННОЙ | 2022 |
|
RU2789101C1 |
Изобретение относится к области гидроакустических измерений, а именно к способам и устройствам измерения шумности морских объектов. Заявленный способ измерения шумности подводного аппарата заключается в том, что используется временный полигон, оборудованный заякоренным радиогидроакустическим буем с направленной гидроакустической антенной и калиброванным приёмным трактом, а текущее расстояние между подводным аппаратом и радиогидроакустическим буем определяется по изменению пеленга подводного аппарата, периодически измеряемого радиогидроакустическим буем с последующей обработкой полученных результатов. Технический результат – обеспечение высокой точности измерения шумности обитаемых и необитаемых подводных аппаратов вне специально оборудованных полигонов. 1 ил.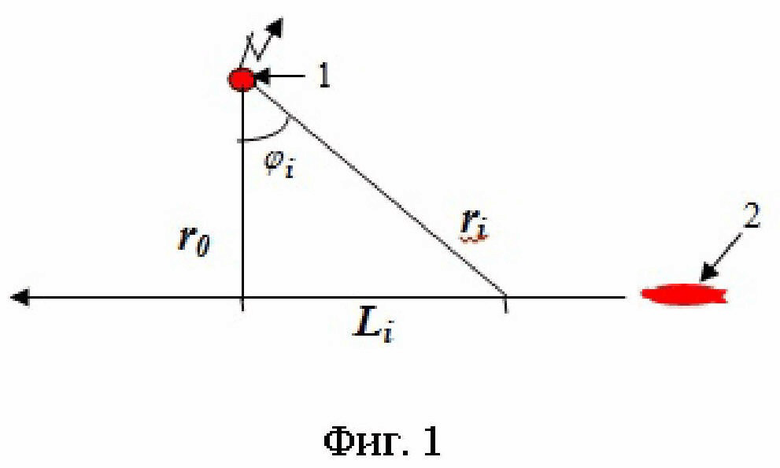
Способ измерения шумности подводного аппарата (ПА), включающий движение ПА в подводном положении с постоянными курсом и скоростью мимо гидроакустической приёмной системы, приём приёмной системой шума ПА в широком диапазоне частот с записью его с привязкой ко времени в память процессора приёмной системы, периодическое с циклом в несколько секунд измерение текущего расстояния между ПА и гидроакустической приёмной системой, вычисление последовательности узкополосных энергетических спектров шума ПА, записанного в память процессора приёмной системы с привязкой к расстоянию между ПА и гидроакустической приёмной системой, вычисление с использованием каждого узкополосного спектра и соответствующего ему расстояния между ПА и гидроакустической приёмной системой приведённых к расстоянию 1 м уровней шума ПА в третьоктавных фильтрах, усреднение приведённых уровней шума ПА третьоктавных спектров, вычисленных с использованием нескольких последовательных узкополосных спектров, отличающийся тем, что в качестве приёмной системы используется заякоренный радиогидроакустический буй (РГБ) с направленной гидроакустической антенной и калиброванным приёмным трактом, а расстояние между ПА и РГБ  в
в  -й момент времени
-й момент времени  определяется по формуле
определяется по формуле
 ,
,
где
 – известная (заданная) скорость движения ПА;
– известная (заданная) скорость движения ПА;
 - кратчайшее расстояние между ПА и РГБ;
- кратчайшее расстояние между ПА и РГБ;
 - момент времени прохождения кратчайшего расстояния между ПА и РГБ,
- момент времени прохождения кратчайшего расстояния между ПА и РГБ,
причём кратчайшее расстояние между ПА и РГБ и момент времени прохождения кратчайшего расстояния между ПА и РГБ , а также пеленг ПА в момент времени прохождения кратчайшего расстояния между ПА и РГБ  определяются путём нахождения минимума функции
определяются путём нахождения минимума функции 
 ,
,
где
 – пеленг ПА, измеренный в момент времени ;
– пеленг ПА, измеренный в момент времени ;
 – количество измеренных пеленгов ПА при прохождении ПА мимо РГБ.
– количество измеренных пеленгов ПА при прохождении ПА мимо РГБ.
| СПОСОБ ОПРЕДЕЛЕНИЯ УРОВНЯ ДАВЛЕНИЯ ШУМОИЗЛУЧЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В НАТУРНОМ ВОДОЕМЕ | 2004 |
|
RU2284484C2 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ | 2011 |
|
RU2469346C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОДВОДНОГО УРОВНЯ ЗВУКОВОГО ДАВЛЕНИЯ В ПОЛОСЕ ЧАСТОТ СУДНА, ПРОХОДЯЩЕГО НАД ГИДРОАКУСТИЧЕСКОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМОЙ | 2004 |
|
RU2284485C2 |
| US 8912892 B2, 16.12.2014 | |||
| WO 2016068821 A1, 06.05.2016. | |||

