Настоящее изобретение относится к области гидроакустики и предназначено для обнаружения и классификации эхо-сигналов от реальных объектов гидролокатором на фоне реверберационной помехи.
Известна навигационная гидроакустическая станция освещения ближней обстановки по патенту РФ №2225991 по кл. G01S 15/00, опубл. 20.03.2004 г. на «Навигационную станцию освещения ближней обстановки», которая содержит антенну, коммутатор приема передачи, тракт предварительной обработки, генераторное устройство, первую цифровую вычислительную машину, вторую вычислительную цифровую машину, тракт измерения скорости звука и цифроаналоговый тракт прослушивания.
Недостатком является то, что обнаружение и классификация в этой станции осуществляется оператором по информации, выводимой на индикатор, после того как закончится прием всей информации и оператор примет решение о наличии эхо-сигнала от цели по характеру отметки на индикаторе.
Известна «Система автоматической классификации гидролокатора ближнего действия» по патенту РФ №2465618 (кл. G01S 15/00, опубл. 27.10.2012 г.), которая содержит последовательно соединенные антенну, коммутатор приема - передачи и задающий генератор, индикатор, процессор цифровой многоканальной обработки и обнаружения сигналов, блок управления, процессор классификации, блок выбора порога измерения, блок отбора максимума, блок идентификации между каналами, блок измерения угловой протяженности, блок измерения радиальной протяженности, блок автоматического принятия решения, блок формирования результатов, блок корректировки автоматического решения.
Недостатком рассматриваемой системы классификации является обнаружение эхо-сигнала от цели при сравнении амплитуды эхо-сигнала с порогом. При наличии шумовой или реверберационной помехи, действующей на входе антенны, уровень порога повышается, что приводит к пропуску эхо-сигнала от цели или к пропуску классификационных признаков.
Известна «Система автоматической классификации гидролокатора ближнего действия» по патенту РФ №2534731 (кл. G01S 15/05, опубл. 10.12.2014 г.), которая содержит задающий генератор коммутатор, приемное устройство, процессор цифровой многоканальной обработки и обнаружения эхо-сигналов, индикатор, блок выбора массива для классификации, блок формирования строба, блок определения координат зоны эхо-сигнала, процессор классификации с блоком корректировки автоматического решения.
Недостатком этой системы является необходимость формирования строба по обнаруженной оператором цели, и классификация начинается после того, как произошло обнаружение и наведен строб на место обнаружения эхо-сигнала на индикаторе и определены координаты, что требует дополнительного времени.
Техническим результатом использования предлагаемого технического решение является обеспечение автоматического обнаружения эхо-сигналов от объектов в условиях воздействия поверхностной и донной реверберации по одному циклу излучения - прием по всем пространственным характеристикам направленности по одному циклу излучения - прием, автоматическое измерение параметров обнаруженных объектов и выдача данных на их классификацию.
Указанный технический результат достигается тем, что система автоматического обнаружения и классификации гидролокатора ближнего действия содержит последовательно соединенные антенну, коммутатор приема передачи, приемное устройство, формирующее статический веер характеристик направленности, процессор цифровой многоканальной обработки, процессор классификации, с блоком корректировки автоматического решения введены новые признаки, а именно процессор цифровой многоканальной обработки содержит последовательно соединенные блок набора последовательных отсчетов во временных интервалов по последовательным пространственным каналам для обработки за весь цикл излучения - приема, блок определения коэффициента корреляции между временными интервалами соседних пространственных каналов, блок выбора последовательных временных интервалов между пространственными каналами с коэффициентом корреляции (КК) больше 0,5, блок определения амплитуд временных отсчетов выбранных временных интервалов, блок выбора максимальных амплитуду во временных интервалах с коэффициентом корреляции больше 0,5, блок идентификации интервалов с КК>05 по единому времени и блок формирования банка данных, принадлежащих обнаруженным объектам, причем первый выход процессора многоканальной обработки, являющийся выходом блока набора последовательных отсчетов для обработки, соединен с первым входом блока управления и отображения, выход которого соединен через генератор излучения с коммутатором приема передачи, а второй выход с блока формирования банка данных, принадлежащих обнаруженным объектам, через процессор классификации двусторонней связью соединен со вторым входом блока отображения и управления оператором, этот же выход соединен непосредственно с третьим входом блока отображения и управления.
Физическая сущность предлагаемого способа заключается в следующем. Объекты, которые могут быть обнаружены гидролокатором ближнего действия, имеют различные физические характеристики. Объекты могут находиться на поверхности или быть погружены на различную глубину, или просто располагаться на дне. Эхо-сигналы от этих объектов будут различаться по своим энергетическим характеристикам. Для определения этих характеристик используется многоканальный прием эхо-сигнала статическим веером характеристик направленности, что обеспечивает пространственную селекцию обнаруженных объектов по всем характеристикам направленности (ХН). Для автоматического обнаружения эхо-сигнала применяется стандартная процедура сравнения эхо-сигнала с порогом. На вход приемной системы поступают дискретизированные отсчеты с выхода антенны последовательно по всем характеристикам направленности. Эхо-сигнал от объекта, как сумма и конфигурация отсчетов, может находиться в одном или нескольких характеристиках направленности, поскольку характеристики направленности перекрываются. Эхо-сигнал от локального объект формируется на основе отражения энергии падающего зондирующего сигнала на объект по нормали относительно направления прихода зондирующего сигнала гидролокатора. При этом, как правило, локальные отражатели принадлежат к классу отражателей искусственного происхождения и в зависимости от принадлежности могут иметь форму шара, эллипсоида, куба, цилиндра, конуса, плоскости или их различных сочетаний. Это приводит к тому, что при отражении формируется регулярный фронт волны, характеристика которой стабильна на некотором пространственном интервале. (Е.А. Штагер, Е.В. Чаевский. Рассеяние волн на телах сложной формы. М.: Сов. радио 1974 г.). Поскольку локальный отражатель находится в дальнем поле и имеет ограниченные размеры, то эхо-сигнал от такого отражателя представляет плоскую, мало искаженную волну и будет приниматься несколькими характеристиками направленности одновременно, и, соответственно, характеристики эхо-сигнала будут по физическим свойствам достаточно близкими в нескольких соседних пространственных каналах.
Распределенная помеха, каковой является отражение от поверхности, образующая реверберационную помеху, отражение от кильватерного следа надводного корабля, формирующую реверберационную составляющую эхо-сигнала от надводного корабля не имеет ярко выраженных когерентных свойств. В случае донной реверберации (см. Ольшевский В.В. Статистические свойства морской реверберации. М.: Наука, 1966 г.) эхо-сигнал формируется как сумма эхо-сигналов от элементарных отражателей, имеющих различную длительность и различную амплитуду, что приводит к искажению фронта плоской волны. В этой ситуации в соседних характеристиках направленности будут приниматься эхо-сигналы реверберации, которые не связаны между собой или имеют малую степень связи. Эхо-сигналы от такой совокупности будут представлять собой случайную совокупность амплитуд, которые будут приниматься характеристиками направленности независимо друг от друга и поэтому также будут не связаны. Единственным способом, который позволит отличить наличие когерентного локального отражателя, является корреляционная обработка временных реализаций, принимаемых одновременно в соседних пространственных каналах. Фронт волны, отраженный от локального отражателя, является равномерным и характеризуется свойствами поверхности отражателя. Фронт волны, отраженный от распределенного отражателя, определяется случайным формированием отраженного фронта волны отдельных отражателей, и при приеме соседними характеристиками направленности эхо-сигналы не будут иметь корреляционной связи. Таким образом, для реализации предлагаемого метода обработки необходим прием эхо-сигнала веером статических характеристик направленности, обнаружение эхо-сигнала соседними характеристиками направленности, выбор временных реализаций в соседних пространственных каналах, определение степени корреляционной связи между каналами и определение числа каналов, в которых эта связь существует. После того как будут автоматически обнаружены эхо-сигналы от реальных объектов и автоматически измерены их параметры, можно будет провести классификацию с использованием амплитудных и пространственных признаков.
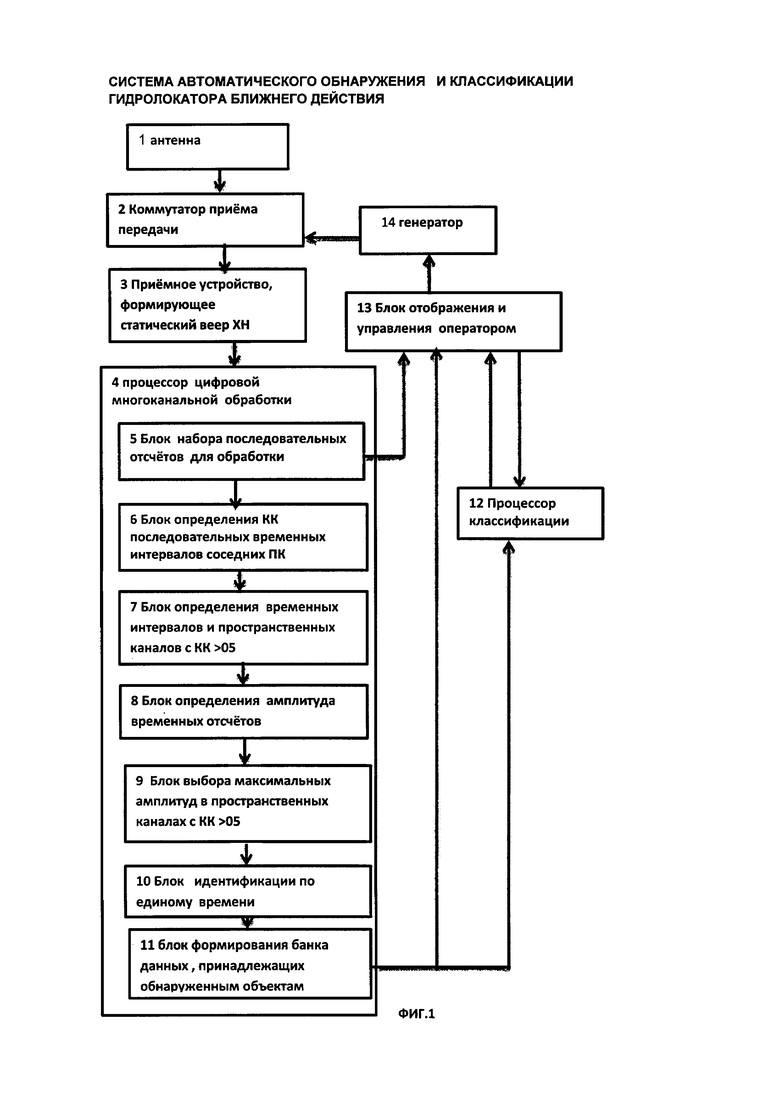
Сущность изобретения поясняется фиг. 1, на которой представлена структурная схема системы автоматического обнаружения и классификации гидролокатора ближнего действия.
Заявленная система содержит последовательно соединенные антенну 1, коммутатор приема передачи 2, приемное устройство 3, формирующее статический веер характеристик направленности, и процессор 4 многоканальной обработки. В состав процессора 4 входят последовательно соединенные блок 5 выбора последовательного массива для обработки, блок 6 определения коэффициента корреляции последовательных временных интервалов соседних ПК, блок 7 определения временных интервалов и пространственных каналов с коэффициентом корреляции больше 0,5, блок 8 определения амплитуд временных отсчетов, блок 9 выбора максимальных амплитуд в пространственных каналах с коэффициентом корреляции больше 0,5, блок 10 идентификации по единому времени отсчетов в пространственных каналах с КК>05, блок 11 формирования банка данных, принадлежащих обнаруженным объектам, причем первый выход процессора многоканальной обработки соединен через первый вход блока 12 отображения и управления оператором с генератором 13 излучения и коммутатором приема передачи 2, а второй выход – через процессор классификации 14 со вторым входом блока отображения и управления оператором 12 двусторонней связью.
Предложенная система работает следующим образом. Блок 12 управления и отображения в соответствии с заложенными последовательными командами формирует сигнал и передает в генератор 14, где формируется зондирующий сигнал и излучается через антенну 1. Отраженные эхо-сигналы принимаются антенной, обрабатываются статическим веером характеристик направленности многоканальным приемным устройством 3, которое передает последовательные временные интервалы отсчетов входных реализаций по всем пространственным каналам статического веера характеристик направленности. Приемное устройство совместно со статическим веером характеристик направленности является известным устройством и используется в прототипе и в современной гидроакустической аппаратуре (А.С. Колчеданцев. «Гидроакустические станции». Судостроение. Л.: 1982, с. 116). Устройство производит предварительную фильтрацию входного сигнала и преобразует аналоговый сигнал в последовательные интервалы дискретизированных цифровых отсчетов всех пространственных характеристик. Процессор 4 осуществляет пространственную и временную обработку поступившей информации. В блоке 5 осуществляется последовательное формирование принятых цифровых массивов и подготовка их для последующей обработки. Вся поступившая временная и последовательная пространственная информация без предварительной обработки передается в блок управления и отображения для представление на индикатор оператору. В блоке 6 осуществляется выбор последовательных временных интервалов соседних пространственных каналов и определение коэффициента корреляции между ними. Определение коэффициента корреляции является известной операцией, которая осуществляется во всех современных цифровых устройствах с использованием стандартных процедур. Практически все указанные процедуры могут быть реализованы на спецпроцессорах и современных компьютерах, в которых реализованы вычислительные программы Матлаб, Матсард и др. (А.Б. Сергиенко. Цифровая обработка сигналов. СПб.: «БХВ - Петербург», 2011 г.). Полученные значения коэффициентов корреляции поступают в блок 7, где осуществляется выбор временных интервалов, коэффициент корреляции между которыми превысил порог 0,5, и соответствующих пространственных каналов. В блоке 8 осуществляется измерение амплитуд всех цифровых отсчетов выбранных временных интервалов, значения которых передаются в блок 9, где осуществляется выбор максимальных значений амплитуд, по которым в процессоре классификации будет определяться дистанция, а по номеру пространственной характеристики направленности можно будет определить пространственное положение обнаруженного объекта. Для этого в блоке 10 происходит идентификация по времени цифровых отсчетов, которые принадлежат различным пространственным каналам, временные интервалы которых имеют коэффициент корреляции больше 0,5. Таким образом, формируется единая группа отсчетов, которые принадлежат одному объекту, и она содержит временные интервалы, пространственные значения и максимальные амплитуды отсчетов во временных интервалах. Таких групп отсчетов может быть несколько, они могут быть расположены по времени в любом промежутке от момента излучения до конца шкалы дистанции, которая задается в блоке управления и отображения. Эти группы отсчетов передаются в блок 11 для формирования банка данных параметров, принадлежащих обнаруженным объектам, которые имеют коэффициент корреляции больше 0,5, что говорит о наличии регулярного фронта волны и характеризует реальный объект. Данные, содержащиеся в банке данных под своими номерами, передаются в процессор классификации 12 и на блок 13 для отображения и управления оператору. Процессор классификации является известным устройством, который используется в прототипе и известен по патенту РФ №2534731. Из представленной информации выделяются классификационные признаки и определяется класс обнаруженного объекта. По временным отсчетам максимальных амплитуд определяются дистанции, а по номеру пространственного канала положение обнаруженного объекта в выбранной системе координат. Эти все данные передаются двусторонней связью в блок отображения и управления оператором 13 для представления на индикатор. Оператор может корректировать автоматическое решение, выработанное в процессоре классификации, удалять цели из банка и ставить новые цели на классификацию.
В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также корреляционную обработку и процедуры анализа временных реализаций. Вопросы разработки и применения спецпроцессоров достаточно подробно рассмотрены в литературе по цифровой обработке (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. «Корабельная гидроакустическая техника». Санкт-Петербург: «Наука» 2004 г., стр. 281).
Таким образом, по одной посылке могут быть автоматически обнаружены объекты на фоне реверберации, измерены дистанция и пространственное положение и выбраны эхо-сигналы от обнаруженных реальных объектов для банка классификации, где будут выделены классификационные признаки без влияния реверберационной помехи и принято решение о классе обнаруженного объекта. После проведения обработки первой посылки в блоке управления и отображения формируется очередной сигнал следующего цикла излучения – прием для уточнения координат и определения дополнительных классификационных признаков.
Таким образом, используя корреляционную систему обработки последовательных пространственных и временных интервалов, можно обеспечить автоматическое обнаружение эхо-сигналов от реальных объектов на фоне реверберационной помехи, измерение координат и выработку классификационных признаков за один цикл излучения – прием.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обработки гидролокационной информации | 2017 |
|
RU2657121C1 |
| Способ обработки гидролокационной информации | 2017 |
|
RU2660081C1 |
| Способ обработки и классификации гидролокационной информации | 2019 |
|
RU2725517C1 |
| Система автоматического обнаружения и классификации | 2020 |
|
RU2758586C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОГО ОБЪЕКТА НА ФОНЕ РАСПРЕДЕЛЕННОЙ ПОМЕХИ | 2016 |
|
RU2634787C1 |
| Гидролокационный способ классификации подводных объектов в контролируемой акватории | 2017 |
|
RU2650419C1 |
| Гидролокационный способ классификации с использованием псевдошумового сигнала | 2020 |
|
RU2735929C1 |
| СПОСОБ ОБРАБОТКИ ЭХОСИГНАЛА ГИДРОЛОКАТОРА | 2013 |
|
RU2528556C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ | 2014 |
|
RU2553726C1 |
| Способ обработки псевдошумового сигнала в гидролокации | 2020 |
|
RU2739478C1 |
Настоящее изобретение относится к области гидроакустики и может быть использовано для автоматического обнаружения и классификации реальных объектов гидролокационными системами освещения ближней обстановки на фоне реверберационной помехи. Система автоматического обнаружения и классификации гидролокатора ближнего действия содержит последовательно соединенные антенну, коммутатор приема передачи, приемное устройство со статическим веером характеристик направленности, процессор цифровой многоканальной обработки, процессор классификации, процессор цифровой многоканальной обработки, последовательно соединенные блок выбора последовательного временного массива для обработки, блок определения коэффициента корреляции последовательных временных интервалов, блок выбора последовательных временных интервалов между пространственными каналами с коэффициентом корреляции больше 0,5, блок определения амплитуд временных отсчетов, блок выбора максимальных амплитуду с коэффициентом корреляции больше 0,5, блок идентификации по общему времени с КК>05 и формирования банка объектов, первый выход процессора многоканальной обработки соединен через первый входом блока управления и отображения с генератором излучения и коммутатором приема передачи, а второй выход – со вторым входом блока управления и отображения. Такое построение системы обеспечивает автоматическое обнаружение эхо-сигналов от объектов в условиях воздействия поверхностной и донной реверберации по одному циклу излучения - прием по всем пространственным характеристикам направленности, автоматическое измерение параметров обнаруженных объектов и выдачу данных на их классификацию. 1 ил.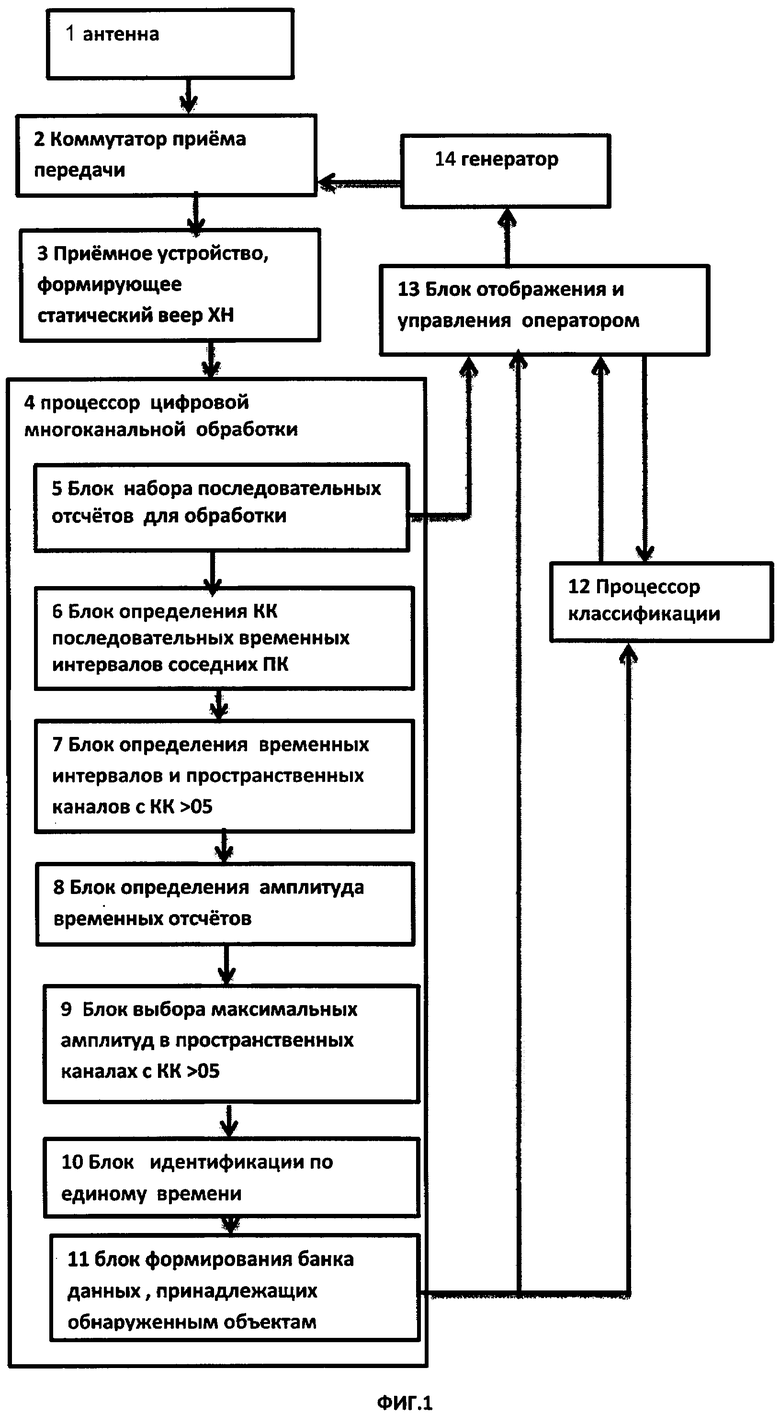
Система автоматического обнаружения и классификации гидролокатора ближнего действия, содержащая последовательно соединенные антенну, коммутатор приема передачи, приемное устройство, формирующее статический веер характеристик направленности, процессор цифровой многоканальной обработки, процессор классификации с блоком корректировки автоматического решения, отличающаяся тем, что процессор цифровой многоканальной обработки содержит последовательно соединенные блок набора последовательных отсчетов во временных интервалов по последовательным пространственным каналам для обработки за весь цикл излучения - приема, блок определения коэффициента корреляции между временными интервалами соседних пространственных каналов, блок выбора последовательных временных интервалов между пространственными каналами с коэффициентом корреляции (КК) больше 0,5, блок определения амплитуд временных отсчетов выбранных временных интервалов, блок выбора максимальных амплитуду во временных интервалах с коэффициентом корреляции больше 0,5, блок идентификации интервалов с КК>05 по единому времени и блок формирования банка данных, принадлежащих обнаруженным объектам, причем первый выход процессора многоканальной обработки, являющийся выходом блока набора последовательных отсчетов для обработки, соединен с первым входом блока отображения и управления, выход которого соединен через генератор излучения с коммутатором приема передачи, а второй выход с блока формирования банка данных, принадлежащих обнаруженным объектам, через процессор классификации двусторонней связью со вторым входом блока отображения и управления оператором, этот же выход соединен непосредственно с третьим входом блока отображения и управления.
| СИСТЕМА АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2013 |
|
RU2534731C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ ГИДРОЛОКАТОРА БЛИЖНЕГО ДЕЙСТВИЯ | 2011 |
|
RU2465618C1 |
| US 2011128820 A1, 02.06.2011 | |||
| US 2009257312 A1, 15.10.2009 | |||
| СПОСОБ АВТОМАТИЧЕСКОЙ КЛАССИФИКАЦИИ | 2011 |
|
RU2461020C1 |

