Изобретение относится к области гидроакустики и может быть использовано для построения систем автоматического обнаружения эхо-сигналов, принятых гидролокатором на фоне шумовой и реверберационной помехи и измерения параметров объекта при использовании псевдошумовых сигнлов.
Известны способы обнаружения эхо-сигнала, основанные на определении энергетического спектра электрического процесса, представляющего собой смесь электрического сигнала и нормальной стационарной шумовой помехи, изложенные, например, в работе Евтютов Е.С. и Митько В.Б. "Примеры инженерных расчетов в гидроакустике", Судостроение 1981 г, с. 77. Способ содержит спектральный анализ этого процесса, детектирование спектральных составляющих, интегрирование огибающей и обнаружение сигнала при сравнении с порогом. Аналогичный способ обнаружения эхо-сигнала изложен в книге B.C. Бурдик "Анализ гидроакустических систем". Судостроение 1988 г. стр. 347 и содержит многоканальную по частоте фильтрацию, детектирование, выделение огибающей и сравнение с порогом.
Известен способ обнаружения эхо-сигнала, рассмотренный в книге Л. Рабинер, Б. Гоулд, «Теория и применение цифровой обработки сигналов», Мир, Москва, 1978 г. Способ содержит излучение зондирующего сигнала длительностью Т на известной частоте; прием эхо-сигнала; дискретизацию входного сигнала, набор входных дискретизированных отсчетов длительностью Т; определение энергетического спектра с помощью быстрого преобразования Фурье (БПФ), сдвиг набора входного сигнала по времени, многократное повторение процедуры набора сдвинутых во времени входных дискретизированных отсчетов длительностью Т и определение, энергетического спектра, выбор набора с максимальной энергией сигнала, принятие решение об обнаружении по набору с максимальной энергией сигнала.
Недостатком этих способов является то, что они используют тональный сигнал большой длительности и на выходе определяется спектр эхо-сигнала, по которому можно определить скорость сближения, но нельзя определить протяженность эхо-сигнала, что является одним из основных классификационных признаков.
Известны способы обнаружения и измерения параметров эхо-сигналов от объектов с использованием, так называемых, сложных сигналов, при обработке которых на выходе формируется корреляционная функция эхо-сигнала и излученного зондирующего сигнала. Эти способы нашли применение в радиолокации и гидроакустике (Р. Бенжамин. Анализ радио и гидролокационных сигналов, Воениздат, М. 1969). Основные свойства этих сигналов определяются видом внутренней модуляции, которая определяет вид функции неопределенности. Для задач классификации в гидролокации наибольший интерес представляют псевдошумовые сигналы, которые имеют кнопочную функцию неопределенности, обеспечивающие хорошее разрешение по времени и по скорости. (В.А. Зарайский, A.M. Тюрин. Теория гидролокации изд. ВМАОЛУ, Л. 1975, стр. 242). Как правило, обработка таких сигналов производится с использованием многоканальных корреляторов (там же, стр. 255) или многоканальных согласованных фильтров (там же, на стр. 333). Если гидролокатор неподвижен и объект локации неподвижен, то корреляция производится между излученным сигналом и принятым эхо-сигналом. Однако, такая ситуации практически никогда не встречается, и за счет собственного движения и движения цели происходит смещение спектра отраженного сигнала в соответствии с эффектом Допплера (там же, стр.200), в результате чего спектры не совпадают и не образуется свернутая корреляционная функция. Именно по этому, используется при приеме многоканальная обработка, где каждый канал соответствует определенной скорости цели.
В качестве прототипа целесообразно выбрать способ обработки сложного сигнала приведенный на (В.А. Зарайский, A.M. Тюрин. «Теория гидролокации» изд. ВМАОЛУ, Л. 1975, стр. 255)
Способ обработки сложного сигнала содержит следующие операции: излучение зондирующего сложного сигнала, формирования М-опорных сигналов, центральная частота которых сдвинута по частоте относительно излученного сигнала на величину K, прием эхо-сигнала, определение М корреляционных функций между эхо-сигналом и каждым из М-опорных сигналов, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой, определение временного положения максимума корреляционной функции для определения дистанции, определение номера опорного сигнала для определения скорости, отображение результата на индикаторе.
Недостатком этого способа является то, что не измеряются классификационные признаки эхо-сигнала, которые позволят классифицировать обнаруженный объект.
Целью настоящего изобретения является измерение классификационных признаков с использованием результатов обработки сложного сигнала.
Указанная цель достигается тем, что в способ обработки эхо-сигналов, содержащий излучение зондирующего сложного сигнала длительностью Т и полосой F в момент tиз, формирования М-опорных сигналов, центральная частота которых сдвинута по частоте относительно излученного сигнала на величину К, прием эхо-сигнала, определение М корреляционных функций между эхо-сигналом и каждым из М-опорных сигналов, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой Амакс, определение временного положения максимума корреляционной функции tмaкc для определения дистанции по формуле Д=0,5С(tмакс-tиз), где С-скорость звука, определение номера опорного сигнала Mtмакс для определения скорости Vtмакс, отображение результата на индикаторе введены новые признаки, а именно величина сдвига по частоте К не превышает 0,5/Т, определяют крайний номер опорного канала симметричного Mtмакс относительно частоты излучения и в этом канале определяют максимальное значение выброса корреляционной функции Апор, и, если Амакс>2Апор, то определяют амплитуды всех выбросов корреляционной функции канала с Амакс, величина которых превысила 0,5Амакс, определяют временное положение каждого выброса ti, определяют разность между крайними выбросами и протяженность эхо-сигнала L=0,5C(tn-t1), где t1 первый выброс корреляционной функции, превысивший порог, tn последний выброс корреляционной функции, превысивший порог, определяют число выбросов превысивших порог N и определяют класс объекта по скорости, протяженности и числу выбросов.
Поясним достижения положительного результата.
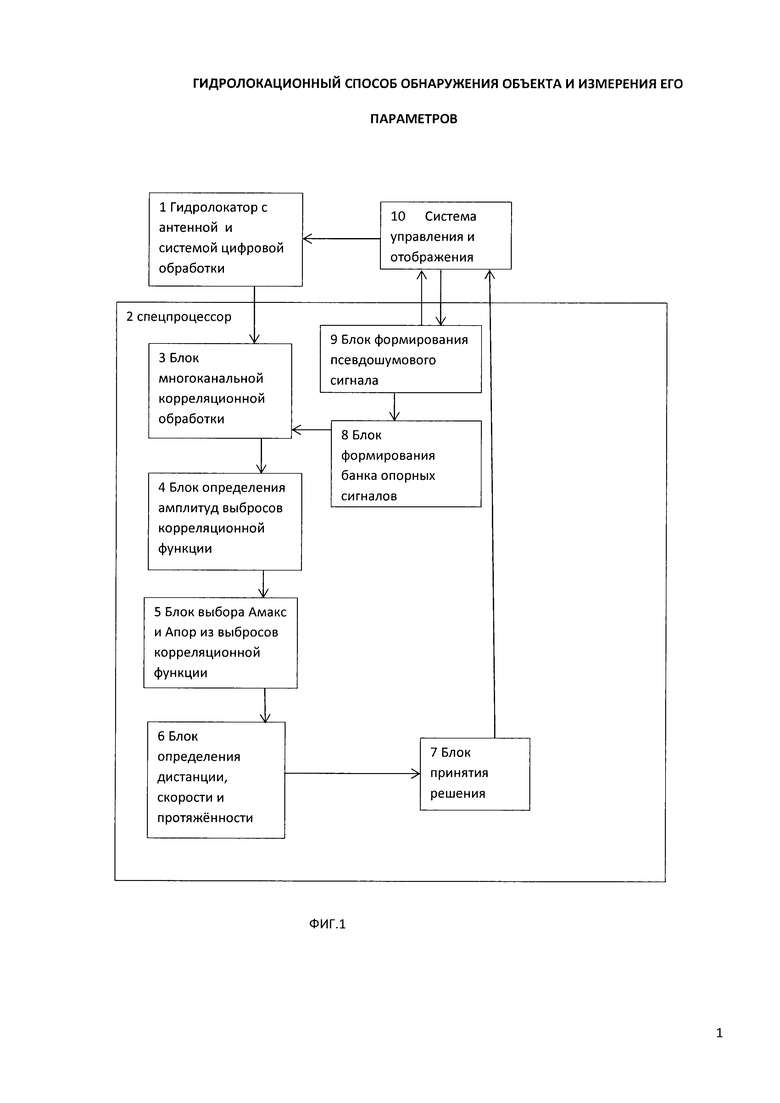
Известно, что недостатком всех сложных сигналов является то, что выходная функция неопределенности, определяемая как совокупность корреляционных функций опорного сигнала и принятого сигнала на всей плоскости частота - время, имеет боковые выбросы, амплитуда которых может достигать значения 0,5 от основного максимума (Р. Бенжамин, «Анализ радио и гидролокационных сигналов», Воениздат, М., 1969, стр. 135). Для каждого вида сложного сигнала боковые выбросы имеют свою структуру и свои особенности и единого способа устранения боковых выбросов не существует. Наименьшая амплитуда боковых выбросов имеет место в том канале обработки, где совпадают частота принятого эхо-сигнала и опорного. В этом случае амплитуда бокового выброса на всей плоскости частота время будет меньше чем 0,5 Амакс, где А макс - амплитуда максимума функции неопределенности в канале Mtмакс. Чем больше длительность и полоса излучаемого сигнала, тем меньше амплитуда боковых выбросов функции неопределенности, но при этом возникают сложности при распространении сигнала в водной среде и сложности при обработке, поэтому полоса сложного сигнала и длительность имеют разумные ограничения. Если просто выбирать максимальную амплитуду корреляционной функции на выходе многоканальной обработки, то всегда может быть выбран некоторый случайный выброс, который соответствует отсутствию реального сигнала. Для исключения этой ошибки выбирают крайний канал в диапазоне опорных частот симметричных каналу Mtмакс. Тем самым для выбора пороговой величины исключаются реверберационные каналы, в которых амплитуды боковых выбросов могут достигать большого значения при наличии реверберационной помехи. Выбор порога по корреляционной функции излученного сигнала и нормального шума не имеет смысла, поскольку боковые выбросы функции неопределенности при наличии сигнала всегда будут превышать амплитуду боковых выбросов сигнала и нормального стационарного шума. Поэтому порог выбирается из бокового выброса функции неопределенности при наличии сигнала Апор. Выполнение условия Амакс>2Апор гарантирует наличие реального сигнала при обработке и наличие реального сигнала с максимальной амплитудой в реальном канале, что решает задачу обнаружения реального сигнала. Большое значение имеет выбор величины сдвига между частотами опорного сигнала. Выбор через интервал корреляции К=1\Т не всегда позволит определить канал с максимальной амплитудой корреляционной функции, которая бы удовлетворяла требованиям задач классификации. Чем больше частота сигнала отличается от опорной частоты, тем больше уровень боковых лепестков, больше влияние взаимной помехи при наличии нескольких бликов, что приводит к ошибкам определения классификационных признаков, скорости и дистанции. После проверки условия Амакс>2Апор, определяется дистанция скорость, число выбросов превысивших порог и протяженность объекта. По этим классификационным признакам можно проводить классификацию обнаруженного объекта по корреляционной функции. На фиг 1 приведена блок схема устройства, которое позволит реализовать предлагаемое техническое решение.
Устройство содержит гидролокатор 1 с антенной и системой цифровой обработки, последовательно соединенный со спецпроцессором 2, в состав которого входят последовательно соединенные блок 3 многоканальной корреляционной обработки, блок 4 определения амплитуд выбросов корреляционной функции, блок 5 выбора Амакс и Апор из выбросов корреляционной функции, блок 6 определения дистанции, скорости и протяженности, блок 7 принятия решения, блок 10 система управления и отображения соединенные с гидролокатором 1. Второй выход системы управления 10 через блок 9 формирования псевдошумового сигнала и блок 8 формирования банка опорных сигналов соединен со вторым входом блока 3 корреляционной обработки, а второй выход блока 9 формирования псеводошумового сигнала соединен со вторым входом блока 10 системы управления и отображения.
Работа устройства производится следующим образом. Система управления и отображения 10 дает команду на блок 9 формирования псевдошумового сигнала и передает сформированный псевдошумовой сигнала на гидролокатор 1 для излучения. Через второй выход блока 9 псевдошумовой сигнала передается в блок 8 формирования банка опорных сигналов. Принятые антенной гидролокатора 1 временные реализации передаются в спецпроцессор 2 в блок 3 корреляционной обработки. На второй вход блока 3 из банка 8 последовательно поступают опорные сигналы и производится последовательная многоканальная обработка принятой временной входной реализации с опорными сигналами. С выхода блока 3 корреляционные функции последовательных временных реализаций поступают в блок 4 определения амплитуд выбросов корреляционных функций с выхода блока 3. В блоке 5 производится выбор амплитуды максимального выброса Амакс из всех выбросов корреляционных функций последовательных реализаций, определения номера канала с опорным сигналом М и положения Амакс по времени, определения Апор, относительно симметричного канала. Эти значения совместно с выбранной корреляционной функцией передаются в блок 6, где производится определения дистанции, скорости и протяженности объекта по измеренным параметрам. Эти данные поступают через блок принятия решения 7 на блок 10 отображения и управления.
Измерение взаимно-корреляционной функции и определение коэффициента корреляции между процессами - это известные операции, которые характеризует степень схожести двух сигналов, и достаточно подробно используются в современной технике. (Дж. Бендат, А. Пирсол, «Измерение и анализ случайных процессов», Мир, М., 1971, стр. 44-47, стр. 196). Процедуры обработки псевдошумовых сигналов достаточно подробно изложены в книге Я.Д. Ширман «Разрешения и сжатие сигналов» М., Сов. радио, 1974, а также в книге Г.И. Тузов «Статистическая теория приема сложных сигналов», М. Сов. Радио, 1977 г. Гидролокатор является известным устройством, который давно используется в отечественном приборостроении. (А.Н. Яковлев, Г.П. Каблов. «Гидролокаторы ближнего действия». Л. Судостроение. 1983.). В настоящее время практически вся гидроакустическая аппаратура выполняется на спецпроцессорах, которые преобразуют акустический сигнал в цифровой вид и производят в цифровом виде формирование характеристик направленности, многоканальную обработку и обнаружение сигнала, а также измерение амплитуд эхо-сигналов и временных отсчетов, а так же принятие решения о цели. Эти вопросы достаточно подробно рассмотрены в литературе. (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев «Корабельная гидроакустическая техника», Санкт-Петербург. «Наука.», 2004 г. Стр. 95-99, стр. 237-255). Использование цифровой техники позволяет оперативно обрабатывать информацию любой сложности на основе разработанных алгоритмов. Эти вопросы достаточно подробно рассмотрены в книге «Применение цифровой обработки сигналов» п\р Оппенгейма М. Мир. 1980 г.
Таким образом, используя последовательную процедуру обработки поступающих временных реализаций, определения корреляционных функций с использованием многоканальной корреляционной обработки можно определять классификационные параметры обнаруженного объекта при применении псеводошумового сигнала.
Изобретение относится к области гидроакустики и может быть использовано для построения систем автоматического обнаружения эхо-сигналов, принятых гидролокатором на фоне шумовой и реверберационной помехи и способ обнаружения объекта и измерения параметров содержит излучение зондирующего сложного сигнала длительностью Т и полосой F в момент tиз, формирования М-опорных сигналов, центральная частота которых сдвинута по частоте относительно излученного сигнала на величину К, прием эхо-сигнала, определение М корреляционных функций между эхо-сигналом и каждым из М-опорных сигналов, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой Амакс, определение временного положения максимума корреляционной функции tмакс для определения дистанции по формуле Д=0,5С(tмакс-tиз), где С - скорость звука, определение номера опорного сигнала Mtмакс для определения скорости Vtмакс, отображение результата на индикаторе, величина сдвига по частоте К не превышает 0,5/Т, определяют крайний номер опорного канала симметричного Мtмакс относительно частоты излучения и в этом канале определяют максимальное значение выброса корреляционной функции Апор, и, если Амакс>2Апор, то определяют амплитуды всех выбросов корреляционной функции канала с Амакс, величина которых превысила 0,5Амакс, определяют временное положение каждого выброса ti, определяют разность между крайними выбросами и протяженность эхо-сигнала L=0,5C(t1-tn), где t1 - первый выброс корреляционной функции, превысивший порог, tn - последний выброс корреляционной функции, превысивший порог, определяют число выбросов, превысивших порог N, и определяют класс цели по скорости, протяженности и числу выбросов. 1 ил.
Способ обнаружения объекта и измерения параметров, содержащий излучение зондирующего сложного сигнала длительностью Т и полосой F в момент tиз, формирования М-опорных сигналов, центральная частота которых сдвинута по частоте относительно излученного сигнала на величину К, прием эхо-сигнала, определение М корреляционных функций между эхо-сигналом и каждым из М-опорных сигналов, измерение амплитуды корреляционных функций, выбор корреляционной функции с максимальной амплитудой Амакс, определение временного положения максимума корреляционной функции tмакс для определения дистанции по формуле Д=0,5С(tмакс- tиз), где С- скорость звука, определение номера опорного сигнала Mtмакс для определения скорости Vtмакс, отображение результата на индикаторе, отличающийся тем, что величина сдвига по частоте К не превышает 0,5/Т, определяют крайний номер опорного канала симметричного Mtмакс относительно частоты излучения и в этом канале определяют максимальное значение выброса корреляционной функции Апор, и, если Амакс>2Апор, то определяют амплитуды всех выбросов корреляционной функции канала с Амакс, величина которых превысила 0,5Амакс, определяют временное положение каждого выброса ti, определяют разность между крайними выбросами и протяженность эхо-сигнала L=0,5C(t1-tn), где t1 - первый выброс корреляционной функции, превысивший порог, tn - последний выброс корреляционной функции, превысивший порог, определяют число выбросов, превысивших порог N, и определяют класс объекта по скорости, протяженности и числу выбросов.
| ПРИБОР ДЛЯ НАГЛЯДНОГО ПОКАЗА ОТКЛОНЕНИЯ ПУЛИ ПРИ НЕПРАВИЛЬНОЙ НАВОДКЕ ВИНТОВКИ | 1925 |
|
SU7211A1 |
| СПОСОБ КОРРЕЛЯЦИОННОЙ ОБРАБОТКИ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ БЫСТРОДВИЖУЩИХСЯ ЦЕЛЕЙ | 2005 |
|
RU2293997C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 2013 |
|
RU2534220C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МАЛОРАЗМЕРНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2013 |
|
RU2524399C1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХО-ИМПУЛЬСНЫЙ ЛОКАТОР | 1996 |
|
RU2133047C1 |
| DE 3113261 A, 21.10.1982. | |||

