ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к устройству и способу обнаружения препятствий для рельсовых транспортных средств, включающему в себя устройство измерения силы, для того чтобы в случае столкновения между противоударной балкой рельсового транспортного средства и массой объекта столкновения генерировать сигнал измерения силы столкновения.
УРОВЕНЬ ТЕХНИКИ
От находящегося на трассе рельсового транспортного средства постороннего тела в случае столкновения может исходить значительная опасность. Поэтому в железнодорожной технике уже длительное время известны так называемые путеочистители или рельсоочистители, при помощи которых препятствие может устраняться с пути следования. Такой путеочиститель в большинстве случае состоит из стальной конструкции с расположенной поперек к направлению движения противоударной балкой. Противоударная балка при помощи монтажного крепления закрепляется на основной раме рельсового транспортного средства или на раме поворотной тележки. Такой путеочиститель обычно располагается перед первой в направлении движения колесной парой и на минимально возможном расстоянии от поверхности катания рельсов.
В EP 2 548 783 A2 раскрыта, например регистрация столкновения для транспортного средства, при которой блок столкновения посредством срезного штифта фиксируется в заданном положении. Лишь при превышении задаваемой интенсивности столкновения доходит до определенных реакций в транспортном средстве (например, до подачи сигнала машинисту и/или до автоматического приведения в действие тормозов). Меньшие или более легкие препятствия не регистрируются.
Известные системы имеют тот недостаток, что не может делаться достоверное суждение о массе объекта столкновения.
Дальнейший недостаток заключается в том, что возникающие с увеличением скорости движения колебания могут приводить к непреднамеренному запуску процесса торможения.
Однако на сегодняшний день к рельсовым транспортным средствам зачастую предъявляется то требование, что экстренное торможение должно стабильно начинаться всегда в том случае, если масса препятствия больше, чем определенное пороговое значение. Типичным пороговым значением является, например лежащее на железнодорожном полотне постороннее тело с массой более чем 5 кг. Меньшее препятствие не должно вызывать процесс торможения, а при необходимости должно передавать соответствующее сообщение машинисту, из которого можно увидеть массу объекта столкновения.
ПРЕДСТАВЛЕНИЕ ИЗОБРЕТЕНИЯ
Задача данного изобретения состоит в предоставлении такого способа и устройства для обнаружения препятствий для рельсовых транспортных средств, что наиболее простым образом может делаться достоверное суждение о массе участвовавшего в столкновении препятствия.
Эта задача решается с помощью устройства согласно признакам пункта 1 формулы изобретения, а в отношении способа согласно признакам пункта 6 формулы изобретения. В зависимых в каждом случае пунктах формулы изобретения определены предпочтительные варианты осуществления изобретения.
Изобретение исходит из того соображения, что масса постороннего тела может при столкновении предпочтительно определяться благодаря тому, что определяется возникающий при столкновении между препятствием и противоударной балкой импульс силы. Таким образом, лежащий в данном случае в основе метод базируется на законе сохранения импульса. В соответствии с ним заданный импульс силы с произвольным ходом кривой сила-время, который оказывается на свободную массу (препятствие), приводит к эквивалентному увеличению импульса этой массы. Если эта масса, то есть препятствие перед столкновением находится в состоянии покоя, то оно ускоряется, по меньшей мере, до скорости движения. Изменение импульса соответствует интегралу по времени эпюры сил столкновения, то есть площади сила-время. Если эта площадь сила-время известна в качестве сигнала столкновения, то искомую массу столкновения можно просто определить, например, благодаря тому, что значение площади сила-время делится на скорость движения.
Таким образом, соответствующее изобретению устройство отличается тем, что:
- сигнал измерения силы столкновения вместе с сигналом скорости рельсового транспортного средства подведен к оценочному устройству, и
- оценочное устройство приспособлено для того, чтобы интегрировать сигнал измерения силы столкновения при помощи интегратора и из изменения этого интеграла с использованием сигнала скорости рельсового транспортного средства определять массу объекта столкновения.
Посредством соответствующего изобретению устройства достигается то, что участвующая в столкновении масса может количественно определяться бортовыми средствами. Таким образом, в случае столкновения на стороне рельсового транспортного средства известно, о какой массе при этом шла речь. Это имеет то преимущество, что в зависимости от тяжести столкновения могут приниматься определенные ответные действия. Если речь идет, например, о легком препятствии, которое может просто устраняться с пути следования путеочистителем, то машинисту рельсового транспортного средства может быть передано сообщение. Если же речь идет о более тяжелом столкновении, при котором участвующая в столкновении масса превышает заданное пороговое значение, например речь идет о массе, которая больше чем 5 кг, то реакцией в рельсовом транспортном средстве может быть запуск процесса торможения или же экстренное торможение.
Так как оценивается не мгновенное значение силы, а его интеграл, повышается надежность (корректность) системы. Наибольшим преимуществом это является в частности при более высоких скоростях. При более высоких скоростях движения увеличиваются, основываясь на опыте, перемещения поворотной тележки в направлении движения. Может доходить до колебаний поворотной тележки, вследствие чего при известных устройствах регистрации столкновений вызываются нежелательные ложные тревоги или нежелательные процессы торможения.
Дальнейшее преимущество заключается в том, что при реализации изобретения необходимы лишь сравнительно незначительные технические усилия. В значительной степени могут использоваться стандартизированные электронные компоненты, например цифровые процессоры и цифровые фильтры, и другие промышленные встроенные цифровые модули, такие как электронные интеграторы. Таким образом, издержки при изготовлении сравнительно низки.
Может быть предпочтительным, если интегрирование является ограниченным по времени интегрированием с течением времени, чья продолжительность интегрирования примерно соответствует ожидаемой длительности импульса.
При этом с точки зрения вычислений может быть преимуществом, если интегратор является блок-интегратором с постоянными или непостоянными коэффициентами. Вследствие этого при обработке сигнала достигается действие фильтра верхних частот, и одновременно интегрирование проводится лишь в рассмотренном промежутке времени, то есть между началом и концом столкновения. Вследствие этого постоянные составляющие, как например снег, который лежит на железнодорожном пути, не оцениваются при вычислениях.
Посредством использования блок-интегратора с непостоянными коэффициентами (реализация в виде КИХ-фильтра) могут уменьшаться краевые эффекты блок-интегратора с постоянными коэффициентами, и одновременно может еще привноситься действие фильтра нижних частот, вследствие чего наряду с действием интегрирования он также действует в качестве фильтра резкого сокращения. Вследствие этого может экономиться вычислительная мощность.
Альтернативно блок-интегратору, который может реализовываться в виде КИХ-фильтра, могла бы также использоваться рекурсивная реализация бесконечного интегратора при помощи БИХ-фильтра. Так как рекурсивный интегратор не имеет действия фильтра верхних частот, постоянные составляющие удаляются при помощи дополнительного фильтра верхних частот. Эта реализация предпочтительна при процессорных системах с небольшим объемом оперативной памяти, так как в отличие от КИХ-фильтра входные данные не должны временно храниться в буфере.
Для того чтобы предотвращать изменения высоты, вызванные сжатием основной рессоры, может быть предпочтительным, если устройство измерения силы расположено в силовом потоке столкновения между противоударной балкой и осевым подшипником рельсового транспортного средства.
Однако альтернативно этому также возможна сравнительно более простая конструкция, у которой устройство для измерения силы встроено между путеочистителем и рамой поворотной тележки непосредственно в силовой поток.
Изобретение относится также к способу обнаружения препятствий для рельсового транспортного средства, отличающемуся тем, что:
- сигнал измерения силы столкновения вместе с сигналом скорости рельсового транспортного средства подводится к оценочному устройству, и
- оценочное устройство интегрирует сигнал измерения силы столкновения при помощи интегратора и с использованием сигнала скорости рельсового транспортного средства определяет массу объекта столкновения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖА
Для дальнейшего разъяснения изобретения в последующей части описания делаются ссылки на чертеж, на котором дальнейшие предпочтительные исполнения, эффекты и варианты изобретения разъяснены более подробно при помощи неограничивающих примеров осуществления. На чертеже показаны:
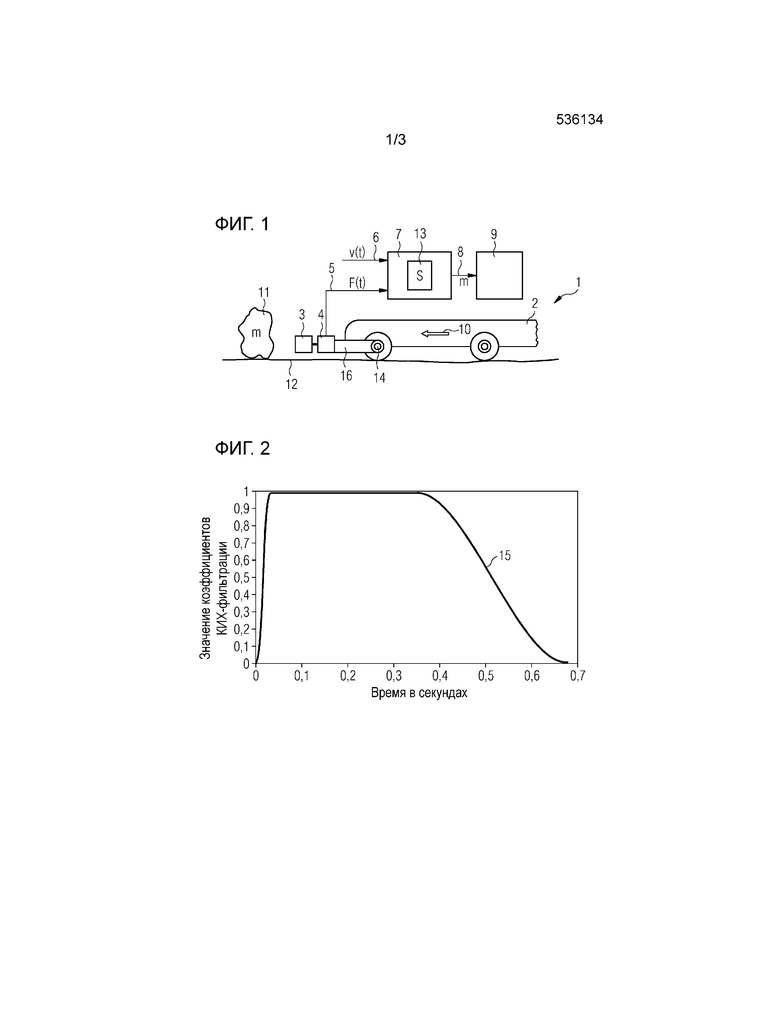
фиг. 1 - схематичное изображение примера осуществления изобретения, которое на блок-схеме наглядно показывает определение массы объекта столкновения, причем к находящемуся на борту рельсового транспортного средства сигнальному и оценочному устройству подведен сигнал силы столкновения и сигнал скорости;
фиг. 2 - коэффициенты КИХ-фильтрации блок-интегратора в зависимости от времени интегрирования, который предпочтительно подходит для того, чтобы в сигнальном и оценочном устройстве вычислять импульс силы и в последующем массу объекта столкновения;
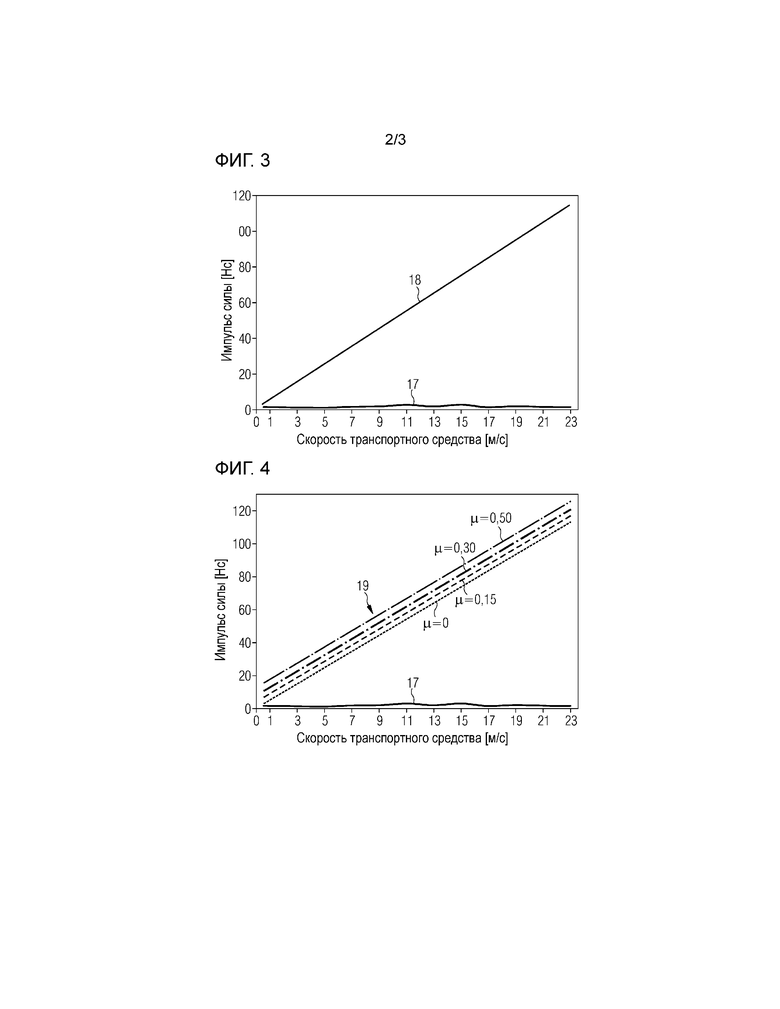
фиг. 3 - диаграмма, которая показывает зависящее от скорости отношение сигнал/шум; кривая 18 показывает вычисленный импульс силы при столкновении с объектом в 5 кг в зависимости от скорости, причем трение не учтено; кривая 17 показывает ожидаемый во время штатного режима (движение рельсового транспортного средства без столкновения) импульс силы, вычисленный из ускорения рамы и массы балки в 10 кг, причем значения ускорения рамы реально являются измеренными значениями из измерений во время эксплуатации;
фиг. 4 - то же что и фиг. 3, однако здесь к импульсу силы из столкновения с объектом в 5 кг еще прибавляется импульс силы из трения этого объекта в 5 кг с железнодорожным полотном, вследствие чего повышается отношение сигнал/шум при низких скоростях;
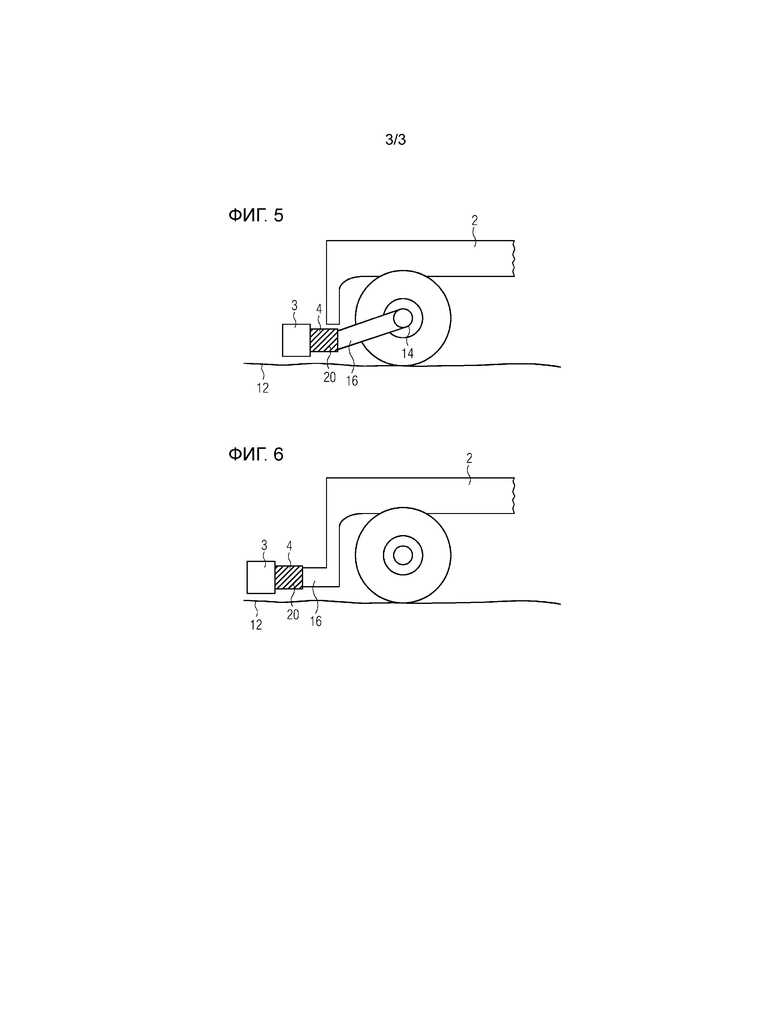
фиг. 5 - схематичное изображение, которое показывает монтаж устройства измерения силы в силовом потоке между путеочистителем и осевым подшипником; и
фиг. 6 - схематичное изображение, которое показывает монтаж устройства измерения силы в силовом потоке между путеочистителем и рамой поворотной тележки.
ИСПОЛНЕНИЕ ИЗОБРЕТЕНИЯ
Фиг. 1 на схематичном изображении показывает первый пример осуществления изобретения. На фиг. 1 ссылочной позицией 1 обозначено не изображенное более подробно рельсовое транспортное средство, которое двигается в направлении стрелки 10 по рельсовому пути 12. Рельсовое транспортное средство 1 приближается к находящемуся на рельсовом пути 12 препятствию 11. Это препятствие 11 находится в состоянии покоя и имеет массу m. Спереди на рельсовом транспортном средстве расположена противоударная балка 3, обозначаемая в дальнейшем также как путеочиститель. Если доходит до столкновения между путеочистителем 3 рельсового транспортного средства 1 и препятствием 11, то масса m ускоряется, по меньшей мере, до скорости транспортного средства, однако не более чем до двойной скорости транспортного средства. На путеочиститель 3 действует сила F столкновения. Эта сила F столкновения измеряется при помощи устройства 4 измерения силы, которое расположено в силовом потоке между путеочистителем 3 и смонтированным на осевом подшипнике 14 монтажным креплением 16. Этот зависимый от времени сигнал 5 измерения силы столкновения, обозначаемый в дальнейшем также кратко как сигнал F(t) силы, вместе с сигналом 6 скорости подводится к находящемуся на борту устройству 7 обработки сигналов и оценки, обозначаемому в дальнейшем также кратко как оценочное устройство 7. Оценочное устройство 7 включает в себя интегрирующее устройство 13. Это интегрирующее устройство 13 выполняет ограниченное по времени интегрирование сигнала F(t) силы. Импульс силы определяется посредством интегрирования сигнала F(t) силы в пределах ta и tb интегрирования. При этом оба предела ta или tb интегрирования обозначают начало и конец столкновения. Как уже было упомянуто, исходят из того, что препятствие 11 перед столкновением находилось в состоянии покоя и после столкновения перемещается со скоростью транспортного средства.
Функциональные возможности интегрирования с точки зрения электроники могут быть реализованы по-разному, например, подходит ограниченное по времени интегрирование при помощи по существу известного блок-интегратора. Также цифровые фильтры, как например по существу известные БИХ- и/или КИХ-фильтры могут использоваться для этого в оценочном устройстве.
В итоге согласно изобретению в качестве критерия для обнаружения препятствий оценивается не сила или характер изменения силы, а интеграл возникающей при столкновении силы. Вызванный столкновением импульс силы зависит лишь от массы m объекта и от изменения скорости объекта. В основе изобретения лежит идея, что заданный импульс силы с произвольным характером изменения силы, который оказывается на (свободную) массу, приводит к эквивалентному увеличению импульса этой массы. На имеющееся в данном случае применение в качестве обнаружения препятствий эта взаимосвязь интерпретируется таким образом, что объект, который ускоряется из состояния покоя до скорости транспортного средства, оказывает определенный импульс силы на путеочиститель 3. Величина этого импульса силы соответствует массе m объекта, умноженной на изменение скорости объекта. Находящаяся между осью времени и мгновенным ходом кривой сигнала F(t) силы площадь соответствует изменению импульса изначально неподвижной массы m столкновения. Масса m столкновения вычисляется благодаря тому, что интеграл по времени кривой изменения силы делится на скорость рельсового транспортного средства. При этом в принципе имеет место то, что определение массы не зависит от того, в течение какого времени происходит ударный импульс.
Результат вычислений на блок-схеме фиг. 1 изображен посредством сигнала 8 массы столкновения. Сигнал 8 является выражением массы препятствия и подводится к устройству 9 управления, которое при необходимости посредством сравнения с заданным пороговым значением массы принимает решение о том, как должно интерпретироваться столкновение, то есть может ли масса m при столкновении восприниматься как достаточно незначительная, для того чтобы лишь выдавать сообщение машинисту, или заданное пороговое значение превышено, так что должен начинаться процесс торможения или экстренное торможение рельсового транспортного средства.
Другими словами согласно концепту изобретения в итоге в качестве критерия уведомления или торможения оценивается не (пороговое) значение силы как таковой, а интеграл силы. Вследствие этого возможно количественное определение массы столкновения. Это в свою очередь делает возможным разграничение при обнаружении препятствий. Вследствие этого лучше учитываются предъявленные на сегодняшний день к рельсовым транспортным средствам требования: столкновение с препятствием должно быть также зарегистрировано с количественным выражением, так что может делаться лучшее суждение о повреждающем воздействии.
Дальнейшим преимуществом является большая надежность (корректность) электронного обнаружения препятствий: опасность ложной тревоги, которая может вызываться, например находящимся в направлении движения движением или колебанием поворотной тележки, благодаря оценке интеграла силы незначительна.
Фиг. 2 показывает в качестве примера использованную при электронной обработке 7 сигнала функцию интегрирования интегратора 13. Предпочтительным является использование ограниченного по времени интегратора, чья продолжительность интегрирования примерно соответствует ожидаемой длительности импульса. Использованный в изображенном примере интегратор является так называемым блок-интегратором. На фиг. 2 на абсциссу нанесено время интегрирования в секундах (с), на ординату значение коэффициентов КИХ-фильтрации. Функция 15 интегрирования является не прямоугольным окном, а модифицированным прямоугольным окном, которое в начале и в конце "закруглено" в каждом случае функцией Хеннинга. Средняя продолжительность интегрирования этого модифицированного блок-интегратора в изображенном примере была выбрана в 0,5 секунды, предполагая, что столкновение с объектом завершено после 0,5 с.
Для того чтобы уменьшать воздействия от низкочастотных движений, в этом примере дополнительно был предварительно подключен фильтр верхних частот с частотой среза приблизительно в 1 Гц.
При помощи подобного фильтра верхних частот возможно уменьшать влияния помех, вызванных движениями в направлении движения (направлении X). Благодаря этой характеристике фильтра верхних частот обеспечивается то, что действующая на путеочиститель постоянная сила - как например от лежащего на рельсовом пути снега - не оценивается для электронного обнаружения препятствий.
Далее на основе измерений во время эксплуатации представляется отношение сигнал/шум между полезным сигналом, который соответствует возникающему при столкновении импульсу силы, и теми величинами помех, которые появляются вследствие возникающего при движении рельсового транспортного средства движения рамы.
На последующих диаграммах фиг. 3 и фиг. 4 в каждом случае на абсциссе отображена скорость в метрах в секунду (м/с), а на ординате импульс силы в Ньютонах, умноженных на секунду (Нс). На обеих диаграммах для путеочистителя принимается масса в 10 кг, а для препятствия масса в 5 кг.
На первой диаграмме (фиг. 3) трение не учтено. Кривая 17 показывает возникающий при штатном режиме (движение рельсового транспортного средства без столкновений) уровень шума (проинтегрированное ускорение, умноженное на массу балки в 10 кг), причем необходимые для вычисления уровня шума значения ускорения получались из измерений во время эксплуатации. Кривая 18 (фиг. 3) или 19 (фиг. 4) показывают вычисленное значение импульса силы (пластичный удар), измеренное в Нс, в качестве функции скорости транспортного средства; масса столкновения составляет 5 кг. Как можно понять из кривой 18 (фиг. 3), возникающий вследствие столкновения импульс 18 силы линейно увеличивается с увеличением скорости. При скорости менее 0,5 м/с оценка практически не возможна, так как отношение сигнал/шум слишком низко, то есть вызванная ускорением рамы составляющая шума по сравнению с импульсом силы столкновения в этом случае больше не может пренебрегаться. Однако, начиная со скорости приблизительно в 1 м/с, расстояние до этого уровня шума линейно увеличивается, так что здесь импульс силы расположен на достаточно большом удалении от значения уровня шума, приблизительно в 1 Нс. Тем самым - если не принимается во внимание составляющая трения - начиная со скорости примерно в 1 м/с, возможна достаточно точная оценка массы m препятствия 11.
На второй диаграмме (фиг. 4) учтено трение в виде трения скольжения для различных коэффициентов μ трения. При этом были приняты следующие значения μ=0; μ=0,15; μ=0,3; μ=0,5. Как можно понять из диаграммы фиг. 4, ниже 3 м/с эффекты трения все больше выступают на передний план. Начиная со скорости примерно в 3 м/с, преобладает составляющая ударного импульса из ускорения массы, так что, начиная с этой скорости, при столкновении между путеочистителем и неподвижным препятствием трением можно пренебречь, и возможно достаточно точное суждение о массе объекта столкновения. Тем не мене, при низких скоростях это трение должно учитываться при помощи выбранного "среднего" коэффициента трения.
Если сравнить обе диаграммы (фиг. 3 и фиг. 4), то можно сказать, что при помощи соответствующего изобретению электронного обнаружения препятствий, начиная со скорости приблизительно в 2 м/с, может делаться достаточно точное суждение о массе m объекта 11 столкновения. При более высоких скоростях воздействием трения можно практически пренебречь.
При скоростях ниже приблизительно 1 м/с оценка массы объекта столкновения при помощи закона сохранения импульса возможна с трудом, однако в этом случае при помощи не зависящего от скорости трения, которое также вызывает импульс силы, даже при очень низких скоростях движения может выполняться оценка массы столкновения. Тем не менее, так как сила трения напрямую зависит от коэффициента трения, в этом случае следует ожидать большую погрешность оценки.
Следует понимать, что в качестве датчиков 20 для измерения силы не обязательно должны использоваться датчики силы. Также возможно определять характер изменения силы при столкновении опосредованно при помощи изгиба балки или пружины. В этом случае как раз измеряется пропорциональное силе изменение перемещения. Подходящими для измерения перемещения датчиками могут быть, например обычные тензометрические датчики на изгибаемой балке, или индуктивные или оптические датчики расстояния, или тросовый потенциометр или же датчики скорости/ускорения в сочетании с простым или двойным интегрированием. Эти датчики могут быть размещены на пружинном элементе, например листовой пружине, которая при ударе изгибается.
Противоударная балка 3 может быть закреплена на рельсовом транспортном средстве 1 различными способами: путеочиститель 3 может быть смонтирован на раме поворотной тележки 2 и/или на буксовой коробке 14.
Фиг. 5 показывает расположение, при котором датчики 20 устройства 4 измерения силы расположены в силовом потоке между путеочистителем 3 и монтажным креплением 16, которое закреплено на осевом подшипнике 14. Это расположение имеет то преимущество, что изменения высоты рамы 2 поворотной тележки не имеют значения.
Фиг. 6 показывает альтернативное этому расположение, при котором датчики 20 устройства 4 измерения силы расположены в силовом потоке между путеочистителем 3 и закрепленным на раме 2 поворотной тележки монтажным креплением 16.
В качестве датчиков 20 или измерительных преобразователей силы принимаются в расчет различные устройства, например динамометрический датчик, или непрямой способ измерений, при котором сигнал перемещения пружины используется, тут же обрабатывается и преобразовывается в сигнал силы.
Несмотря на то, что изобретение было детально и более подробно иллюстрировано и описано посредством представленных выше в качестве предпочтительных примеров осуществления, изобретение не ограничено раскрытыми примерами. Другие варианты могут выводиться отсюда специалистом, не покидая объем защиты изобретения.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
1 рельсовое транспортное средство
2 поворотная тележка
3 противоударная балка, путеочиститель
4 устройство измерения силы
5 сигнал измерения силы столкновения
6 сигнал скорости
7 оценочное устройство
8 сигнал массы столкновения
9 устройство управления
10 направление движения
11 препятствие, объект столкновения
12 рельсовый путь
13 интегратор
14 осевой подшипник
15 функция интегрирования
16 монтажное крепление
17 уровень шума
18 импульс силы в виде функции от сигнала 6 скорости, без трения
19 импульс силы в виде функции от сигнала 6 скорости, с трением
20 датчик
m масса препятствия 11.
Изобретение относится к области автоматики обнаружения препятствий для рельсовых транспортных средств. Устройство включает в себя устройство измерения силы, для того чтобы в случае столкновения между противоударной балкой рельсового транспортного средства и массой объекта столкновения генерировать сигнал измерения силы столкновения, сигнал измерения силы столкновения вместе с сигналом скорости рельсового транспортного средства подается на оценочное устройство. Причем оценочное устройство приспособлено для того, чтобы интегрировать сигнал измерения силы столкновения при помощи интегратора и с использованием сигнала скорости рельсового транспортного средства определять массу объекта столкновения, а интегрирование сигнала измерения силы столкновения является ограниченным или не ограниченным интегрированием по времени. Достигается повышение надежности определения массы объекта столкновения для управления торможением рельсового транспортного средства. 2 н. и 9 з.п. ф-лы, 6 ил.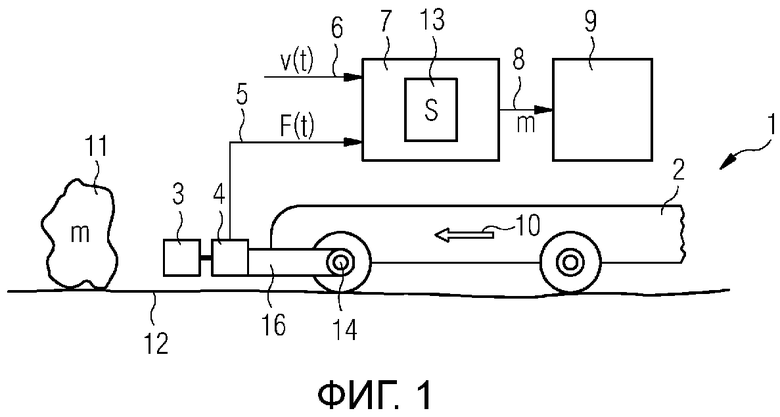
1. Устройство для обнаружения препятствий для рельсового транспортного средства (1), включающее в себя устройство (4) измерения силы, для того чтобы в случае столкновения между противоударной балкой (3) рельсового транспортного средства (1) и массой (m) объекта (11) столкновения генерировать сигнал (5) измерения силы столкновения,
отличающееся тем, что
- сигнал (5) измерения силы столкновения вместе с сигналом (6) скорости рельсового транспортного средства подведен к оценочному устройству (7), и
- оценочное устройство (7) приспособлено для того, чтобы интегрировать сигнал (5) измерения силы столкновения при помощи интегратора (13) и с использованием сигнала (6) скорости рельсового транспортного средства определять массу (m) объекта (11) столкновения,
причем интегрирование сигнала (5) измерения силы столкновения является ограниченным интегрированием по времени или не ограниченным интегрированием по времени.
2. Устройство по п.1, отличающееся тем, что выполняющий интегрирование интегратор (13) является блок-интегратором, выполненным в виде КИХ-фильтра, или БИХ-фильтром.
3. Устройство по п.1 или 2, отличающееся тем, что устройство (4) измерения силы имеет, по меньшей мере, один датчик (20), который расположен в силовом потоке столкновения между противоударной балкой (3) и осевым подшипником (14) рельсового транспортного средства (1).
4. Устройство по п.1 или 2, отличающееся тем, что устройство (4) измерения силы имеет, по меньшей мере, один датчик (20), который расположен в силовом потоке столкновения между противоударной балкой (3) и рамой (16) поворотной тележки (2) или рамой ходовой тележки рельсового транспортного средства (1).
5. Способ обнаружения препятствий для рельсового транспортного средства (1), причем при помощи устройства (4) измерения силы в случае столкновения между противоударной балкой (3) рельсового транспортного средства (1) и массой (m) объекта (11) столкновения измеряют сигнал (5) измерения силы столкновения,
отличающийся тем, что
- сигнал (5) измерения силы столкновения вместе с сигналом (6) скорости рельсового транспортного средства подводят к оценочному устройству (7), и
- оценочное устройство (7) интегрирует сигнал (5) измерения силы столкновения при помощи интегратора (13) и с использованием сигнала (6) скорости рельсового транспортного средства определяет массу (m) объекта (11) столкновения,
причем сигнал (5) измерения силы столкновения интегрируют по времени с ограничением или без ограничения.
6. Способ по п.5, отличающийся тем, что в качестве интегратора (13) используется блок-интегратор, выполненный в виде КИХ-фильтра, или БИХ-фильтр.
7. Способ по п.5, отличающийся тем, что в оценочном устройстве (7) предусмотрен фильтр верхних частот, который используется для удаления постоянных составляющих и низкочастотных составляющих сигнала.
8. Способ по п.5, отличающийся тем, что устройство (4) измерения силы включает в себя, по меньшей мере, один датчик (20), который расположен в силовом потоке столкновения между противоударной балкой (3) и осевым подшипником (14) поворотной тележки (2) рельсового транспортного средства (1).
9. Способ по п.5, отличающийся тем, что устройство (4) измерения силы включает в себя, по меньшей мере, один датчик (20), который расположен в силовом потоке столкновения между противоударной балкой (3) и рамой (16) поворотной тележки (2) рельсового транспортного средства (1).
10. Способ по п.5, отличающийся тем, что определение массы (m) выполняется при помощи закона сохранения импульса для сигнала (6) скорости рельсового транспортного средства, значение сигнала которого больше, чем задаваемое пороговое значение скорости.
11. Способ по п.5, отличающийся тем, что ниже задаваемого порогового значения скорости определение массы осуществляется при помощи трения скольжения.
| EP 1637405 A1, 22.03.2006 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| ЛЕКАРСТВЕННАЯ КОМПОЗИЦИЯ ДЛЯ ЛЕЧЕНИЯ ДОБРОКАЧЕСТВЕННЫХ НОВООБРАЗОВАНИЙ НА КОЖЕ | 2008 |
|
RU2396942C2 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Handbuch Fahrerassistenzsysteme: Grundlagen, Komponenten und Systeme für aktive Sicherheit und Komfort, Chapter 10: Fahrdynamik-Sensoren für FAS; Chapter 21: Gestaltung von Mensch-Maschine-Schnittstellen; Chapter 23: Anzeigen für Fahrerassistenzsysteme; Chapter 24: Fahrerwarnelemente; Chapter 29:2, 01.01.2009, HANDBUCH FAHRERASSISTENZSYSTEME: GRUNDLAGEN, KOMPONENTEN UND SYSTEME FÜR AKTIVE SICHERHEIT UND KOMFORT, VIEWEG + TEUBNER, WIESBADEN, ISBN 978-3-8348-0287-3, paragraph [32.10.2]. | |||

