Настоящее изобретение относится к системе регулирования сцепления колес регулируемой оси железнодорожного подвижного состава и его восстановления.
Электронные системы установлены на борту большинства современных рельсовых транспортных средств, которые обычно включают в себя подсистемы управления скольжением колес, предназначенные для вмешательства как в случае, когда подвижной состав находится в фазе тяги, так и когда он находится в фазе торможения. Эти подсистемы известны как противоскользящие или пневмоюзовые, а также как системы ПЗК (пневмоюзовой защиты колес).
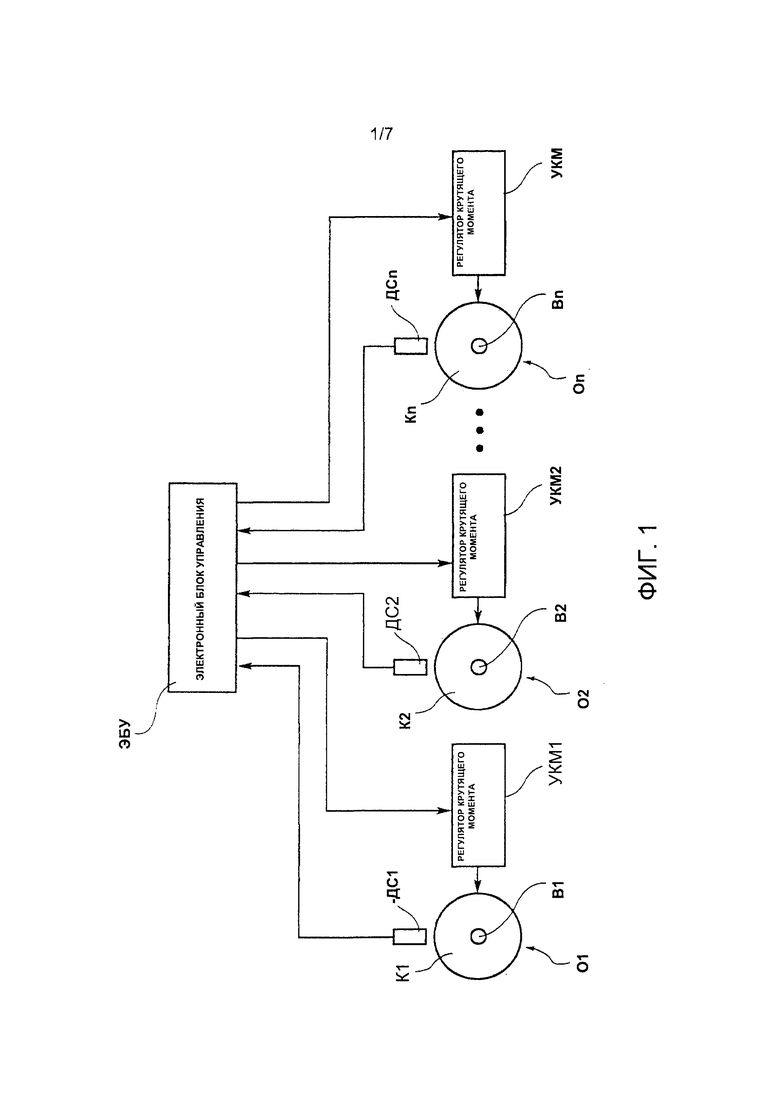
Система для регулирования сцепления колес в момент выполнения противоскользящей функции схематически представлена на фиг. 1 прилагаемых чертежей, которая относится к транспортному средству с п управляемыми осями O1, O2, …, On. Оси O1, O2, …, On содержат соответствующий вал B1, В2, …, Bn и соответствующую пару колес K1, К2, …, Кn, вращающуюся вместе с ним.
На чертежах обычно показано только одно из колес каждой оси.
Система ПЗК, показанная на фиг. 1, содержит электронный блок управления ЭБУ, обычно работающий на базе архитектуры микропроцессора, который принимает сигналы тахометра, относящиеся к угловой скорости каждой оси O1, O2, … On от детекторов ДС1, ДС2, …, ДСn, соответственно связанных с этими осями. Электронный блок управления ЭБУ также соединен с устройствами управления крутящим моментом УКМ1, УКМ2, …, УКМn, каждое из которых связано с соответствующей осью O1, O2, …, On.
Электронный блок управления ЭБУ предназначен для управления модуляцией крутящего момента, приложенного к каждой оси, в соответствии с заданным алгоритмом, если в случае приложения крутящего момента во время тяги или торможения в ухудшенной ситуации сцепления колеса одной или нескольких осей заканчивают движение при возможном начальном условии скольжения. Модуляция крутящего момента реализована таким образом, чтобы предотвратить полную блокировку осей, по возможности таким образом, чтобы привести каждую ось к управляемому скольжению с восстановлением сцепления или, во всяком случае, к управляемому скольжению в течение всего периода ухудшенного сцепления.
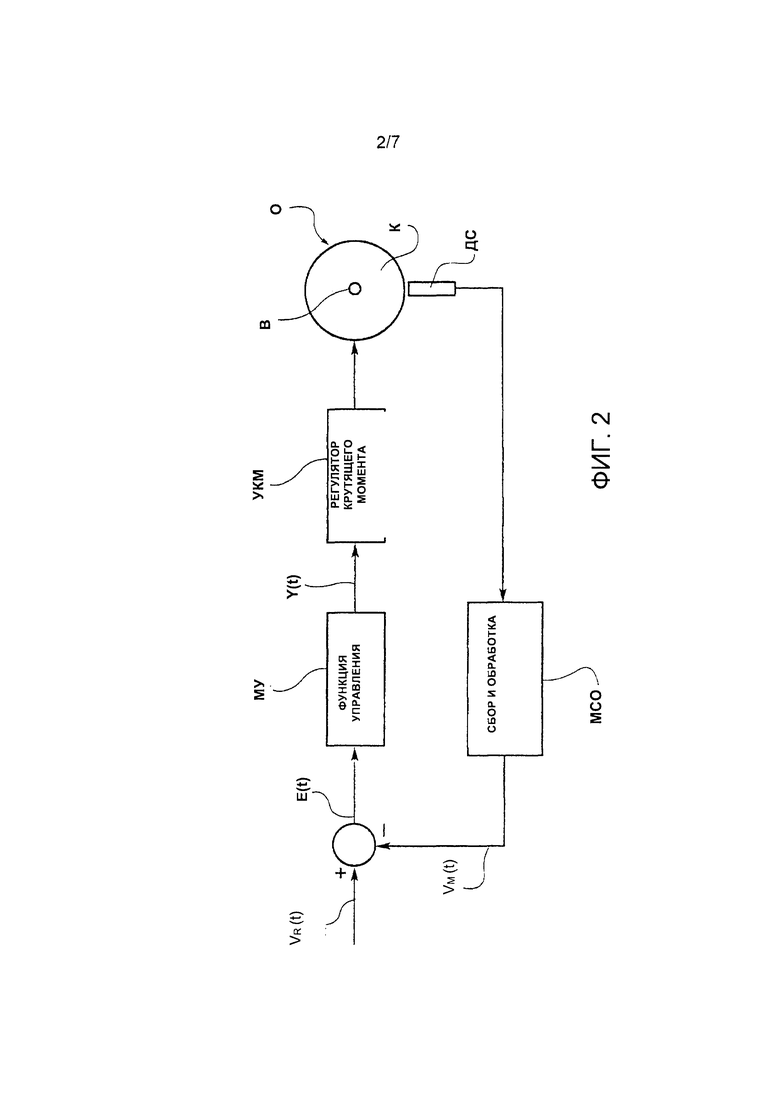
На фиг. 2 показана блок-схема, иллюстрирующая управление, реализованное в отношении одной оси: погрешность или разность E(t) между контрольным значением скорости VR(t), при которой одно колесо стремится сдвинуть управляемую ось О, и угловой измеренной скоростью VM(t), зарегистрированной связанным с ней датчиком ДС и заданной модулем сбора и обработки МСО, применяется в качестве входного сигнала модуля управления МУ, который выдает на выходе управляющий сигнал Y(t) в устройство управления крутящим моментом УКМ, связанное с осью О.
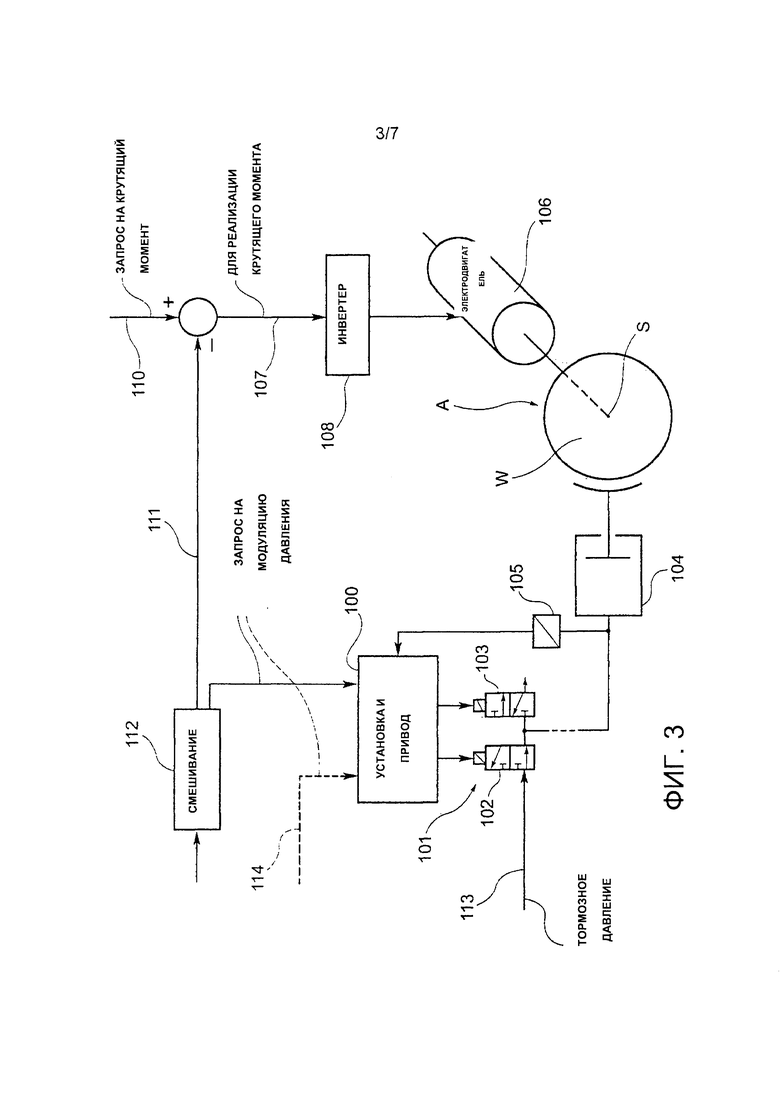
На фиг. 3 показан в качестве неограничивающего примера возможный вариант осуществления устройства управления крутящим моментом УКМ. Такое устройство содержит электронный блок управления и привода 100, который управляет группой 101 электромагнитных клапанов, включающей в себя электромагнитный клапан 102 зарядки и электромагнитный клапан 103 наполнения. В показанном варианте осуществления изобретения эти электромагнитные клапаны представляют собой трехходовые клапаны с двумя положениями. В нормальном состоянии электромагнитный клапан 102 открыт, а электромагнитный клапан 103 закрыт.
Выход зарядного электромагнитного клапана 102 соединен известным способом с тормозным цилиндром 104, связанным с осью О.
Под управлением электронного блока 100 группа 101 клапанов позволяет выборочно уменьшать, поддерживать или увеличивать командное давление, подаваемое на тормозной цилиндр 104, в пределах значений в диапазоне между атмосферным давлением и тормозным давлением, поступающим от электропроводной трубы 113, соединенной с зарядный электромагнитным клапаном 102. Блок 100 может быть выполнен с возможностью регулирования давления, поступающего на тормозной цилиндр 104 в режиме разомкнутого контура, делегирования замыкания контура управления на контур скорости согласно фиг. 2 или управления упомянутым давлением в замкнутом контуре через обратную связь, достигаемого с помощью датчика 105 давления.
Электродвигатель 106 связан с осью О и способен применять к такой оси крутящий момент, тягу или торможение в соответствии с запросом на крутящий момент 107, прикладываемый к инвертору 108, управляющему этим электродвигателем. Крутящий момент, прикладываемый к оси О с помощью двигателя 106, соответствует запросу на крутящий момент 110, модифицированный корректирующим моментом 111, изменяющимся между нулем и значением крутящего момента 110. Крутящий момент 107 является положительным в случае процесса тяги и отрицательным в случае торможения. Смешивающий модуль 112, в случае проскальзывания во время торможения, «смешивает» запрос на предопределенную модуляцию крутящего момента, приложенного к оси О между пневматической системой и регенеративной системой.
Устройство управления крутящим моментом, показанное на фиг. 3, может быть выполнено в соответствии со многими вариантами, известными специалистам в данной области техники. Например, в случае буксируемых железнодорожных подвижных составов или в соответствии с требованиями МСЖД, которые обычно подразумевают использование противоскользящих систем пневматического типа, полностью изолированных от тяговых систем, блок 100 приводится в действие не модулем 112 смешивания посредством запроса 113 модуляции, как показано на фиг. 3, а непосредственно с помощью модуля МУ, показанного на фиг. 2, посредством запроса 114 модуляции крутящего момента, показанного на фиг. 3 штриховой линией.
Модуль МУ управления, показанный на фиг. 2 может работать в соответствии с алгоритмами, полученными с помощью диаграмм состояний или ПИД-структур или систем, основанных на нечеткой логике. Эти алгоритмы имеют цель поддержания оси, находящейся в состоянии зарождающегося скольжения с так называемой «скользящей» скоростью, соответствующей части скорости подвижного состава. Такая скорость также известна как скорость заданного значения. Такие алгоритмы требуют выполнения процедур настройки параметров таким образом, чтобы сделать такие алгоритмы стабильными, избегая или, по меньшей мере, ограничивая колебания системы, а в случае систем ПЗК избегая чрезмерных колебаний мгновенной скорости регулируемой оси относительно заданного значения скорости. Настройка этих параметров более безошибочная и точная, чем меньше системные переменные изменяются относительно одного из их стандартных значений.
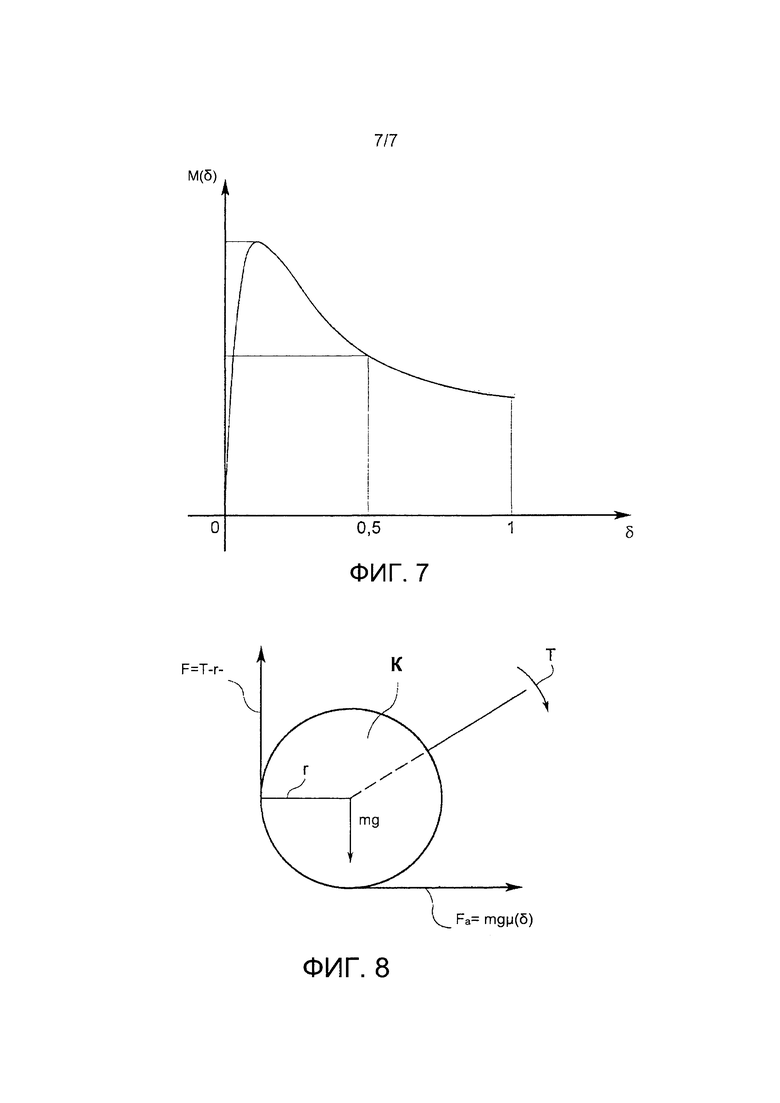
В случае системы управления сцеплением одной из переменных, имеющих широкий диапазон изменений, является мгновенная сила трения Fa(t)=μ(δ)mg, где m - масса на контактной точке между колесом и рельсом, g - ускорение силы тяжести, μ - коэффициент сцепления, а δ - коэффициент скольжения, т.е. величина разницы между скоростью подвижного состава и тангенциальной скоростью колеса, деленная на скорость состава. Сила Fa(t) действует на контактную точку между колесом и рельсом (фиг. 8).
Коэффициент сцепления ц изменяется в зависимости от скольжения δ по существу таким образом, как показано на графике на фиг. 7. При нормальных условиях массы подвижного состава псевдостатические значения (δ≈0) μ, например, позволяющие запускать явления сползания, близки к 0,09 и могут снижаться до значений около 0,01 или даже меньше в присутствии влажных листьев или смесей воды и ржавчины на рельсах, т.е. подвергаются изменениям порядка 20 дБ. Кроме того, в случае некоторых загрязняющих веществ при заданном начальном значении μ (≈0) мгновенное значение μ (δ) при изменении реального времени δ может претерпевать изменения до -6 дБ или выше.
Кроме того, масса m на оси может изменяться в пределах между собственным весом конструкции и весом полной нагрузки как статически, так и динамически во время скольжения из-за раскачивания вагона, с последующим перераспределением веса между двумя его осями.
В случае одновременного скольжения нескольких осей может возникать так называемое явление «очистки рельсов»: ось скольжения создает трение в точке контакта между колесами и рельсами, тем самым передавая энергию и частично очищая рельсы, увеличивая значение μ для следующей оси. Это явление заставляет последовательные оси «сталкиваться» со значениями мгновенного сцепления, отличными друг от друга.
Также следует отметить, что при уменьшении скорости коэффициент трения между тормозным диском и тормозной колодкой (в случае дисковых тормозов) или между колесом и блоком (в случае блочных тормозов) может значительно варьироваться.
Наконец, система, предназначенная для управления процессом регулирования крутящего момента с помощью множества исполнительных механизмов, таких как описанные со ссылкой на фиг. 3, должна адаптироваться к различным передаточным функциям и различным временным константам в реальном времени. Сосуществование этих изменений требует реализации «нежесткой» настройки, такой как принятие всего спектра вариаций с невозможностью получения точного и гибкого контроля за быстрыми изменениями окружающей среды, или адаптивной настройки, «отображаемой» через «справочную таблицу» параметров, выбранных в режиме реального времени в зависимости от одной или нескольких переменных среды, например, описанных в ЕР 2147840 А2.
В ЕР 2147840 А1 описан способ регулирования и возможного восстановления сцепления колес регулируемой оси железнодорожного подвижного состава. Такой способ содержит генерацию первого сигнала скорости, указывающего фактическую угловую скорость колес упомянутой оси и второго сигнала скорости, указывающего фактическую скорость подвижного состава. Из этих сигналов скорости вычисляется значение фактического мгновенного скольжения колес оси. Погрешность или разность между значением фактического мгновенного скольжения и желаемым значением скольжения рассчитывается как функция зарегистрированного ускорения колес оси и тормозного давления, приложенного к тормозным цилиндрам, связанным с этими колесами. Эта погрешность или разность скольжения используется для генерации приводного сигнала для средств управления давлением торможения. Этот приводной сигнал генерируется с использованием устройства управления ПИД-типа, параметры которого изменяются в зависимости от зарегистрированной скорости подвижного состава, причем эти параметры могут принимать множество соответствующих заранее определенных дискретных значений для разных диапазонов значений скорости подвижного состава.
Другие системы управления скольжением для рельсовых подвижных составов описаны в DE 3902846 и ЕР 0889899.
В виду технического контекста, описанного выше, задачей настоящего изобретения является создание усовершенствованного способа регулирования и возможного восстановления сцепления колес регулируемой оси железнодорожного подвижного состава, позволяющего, в частности, непрерывно корректировать в реальном времени параметры управления, позволяя адаптироваться к мгновенным значениям сцепления и веса подвижного состава.
Эта и другие задачи достигаются в соответствии с настоящим изобретением с помощью способа, отличительные признаки которого определены в п. 1 прилагаемой формулы изобретения.
В одном из вариантов осуществления способа вышеупомянутый входной сигнал является сигналом, представляющим заданное значение скорости для колес оси.
В другом варианте осуществления способа упомянутый входной сигнал является сигналом, представляющим вышеупомянутую погрешность или разницу в скорости.
Дополнительные признаки и преимущества изобретения станут очевидными из последующего подробного описания, реализованного со ссылкой на прилагаемые чертежи, на которых:
- Фиг. 1 - блок-схема противоскользящей системы управления колесами железнодорожного подвижного состава;
- Фиг. 2 - блок-схема системы управления замкнутым контуром скорости оси;
- Фиг. 3 - схема возможного варианта осуществления устройства для управления крутящим моментом, приложенным к оси;
- Фиг. 4, 5 и 6 - блок-схемы различных способов построения систем для осуществления способа регулирования в соответствии с настоящим изобретением;
- Фиг. 7 - график, качественно показывающий тренд коэффициента сцепления колеса μ, показанного на оси у, в зависимости от коэффициента скольжения δ, показанного на оси х; и
- Фиг. 8 - блок-схема, демонстрирующая силы, приложенные к колесу оси.
В соответствии с настоящим изобретением способ применяет адаптивные методы настройки и динамическую коррекцию параметров управления скольжением колес оси, причем такие методы используются непрерывно в реальном времени и не основаны на векторах или параметрических таблицах, отображаемых ранее.
Для решения этой задачи изобретение использует метод управления, основанный на адаптивной фильтрации, описанной, например, в работе Б. Уидроу и С.Д. Стирнса, Адаптивная обработка сигналов, Нью-Джерси, Прентис-Холл, Инк., 1985.
Известны различные типы адаптивных фильтров, пригодные для использования в рамках способа в соответствии с настоящим изобретением. В качестве неограничивающего примера настоящее изобретение обеспечивает использование адаптивных фильтров, известных как фильтры МСО (минимальной среднеквадратичной ошибки). Для получения точного описания общих свойств, особенностей, критериев конвергенции и вариантов реализации фильтров МСО, пожалуйста, обратитесь к имеющейся литературе или к цитируемому ранее справочному тексту.
Используемые адаптивные фильтры могут состоять из структур КИХ (конечных импульсных характеристик) и структур БИХ (бесконечных импульсных характеристик).
В соответствии с текущими обозначениями для описания адаптивного фильтра X(t) и Y(t) обозначают его входной и выходной сигналы.
В последующем описании и на прилагаемых чертежах временная переменная t будет обозначаться буквой Т, чтобы обозначить, что это время понимается в дискретном смысле, а именно, что метод/система работает для конечных выборок с периодом Т.
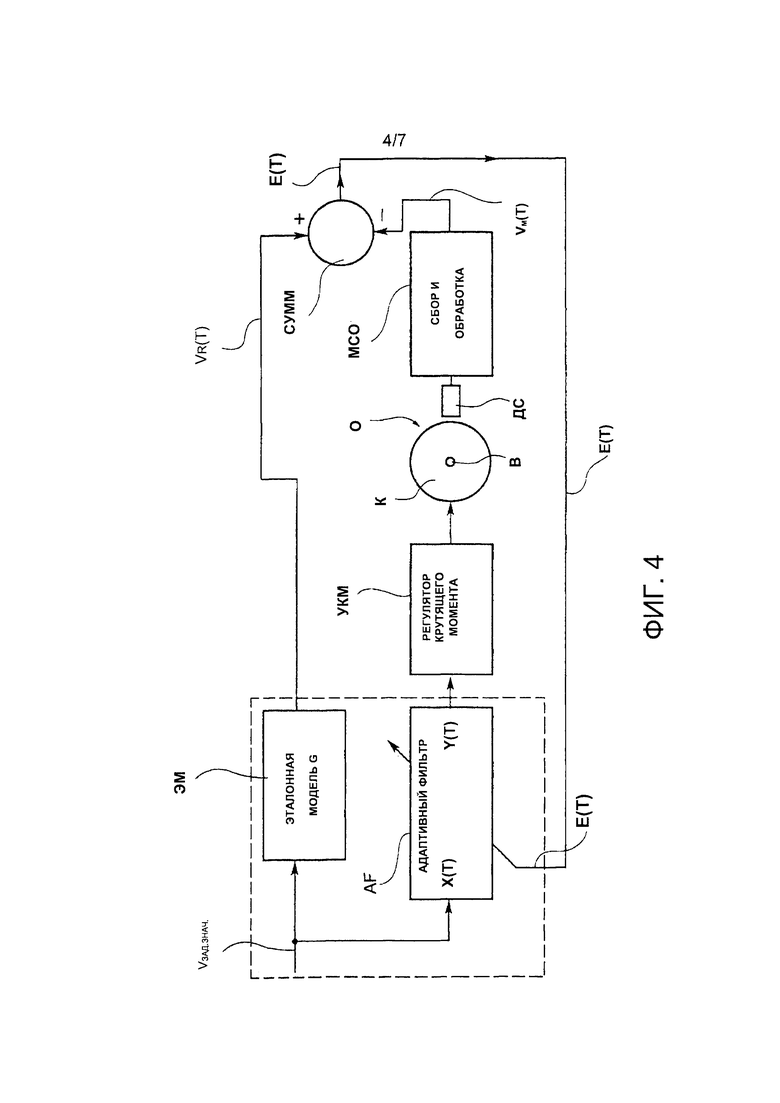
На фиг. 4 показана первая система регулирования, схематически проиллюстрированная для осуществления способа в соответствии с настоящим изобретением.
Система согласно фиг. 4 содержит блок ЭМ, который представляет собой эталонную модель, которая принимает в качестве входного значения заданную скорость VЗАД.ЗНАЧ. для колес К регулируемой оси О и обеспечивает на своем выходе скорость VR(t) оси О в ответ на заданное значение скорости и ее вариации.
Блок ЭМ имеет передаточную функцию G, в идеальном варианте G=1. Однако, более демонстративная система - это та, что более близка к реальности, например (но не исключительно) передаточная функция второго порядка, приближающаяся к ожидаемой модели комплекса, образованного модулем управления МУ устройства управления крутящим моментом УКМ и колесами К, изображенными на фиг. 2.
На фиг. 4 АФ обозначает адаптивный фильтр, например фильтр типа МСО.
На вход Х(Т) такого фильтра АФ подается сигнал, который является функцией скорости VЗАД.ЗНАЧ., например, сигнал, пропорциональный скорости подвижного состава, обычно от 65% до 95% от скорости.
Выходным сигналом Y(T) адаптивного фильтра АФ является приводной сигнал устройства управления крутящим моментом УКМ, которое, в свою очередь, соединено с осью О и ее колесами К.
Выходной сигнал VR(T) блока ЭМ подается на вход сумматора СУММ, с другого входа которого выходит сигнал VM(T), указывающий угловую скорость оси О, фактически измеренную с помощью датчика ДС и связанный с ним модуль сбора и обработки МСО.
Сумматор СУММ в качестве своего выходного сигнала выводит сигнал погрешности Е(Т), указывающий на погрешность или разницу между скоростью VR(T) и измеренной скоростью VM(T), то есть разность между ожидаемой скоростью на выходе блока ЭМ и скоростью VM(T).
Сигнал погрешности Е(Т) подается в адаптивный фильтр АФ, где он используется для непрерывной коррекции параметров этого фильтра, если эта погрешность Е(Т) стремится к нулю.
Стабилизация коэффициентов или параметров адаптивного фильтра АФ может произойти быстро, если входной сигнал Х(Т) имеет гармоническое содержание, эквивалентное ширине полосы управляемого процесса.
В случае системы, показанной на фиг. 4, скорость VЗАД.ЗНАЧ. является сигналом с практически нулевым гармоническим содержанием и, следовательно, относительно неудовлетворительным в отношении необходимости быстрой перенастройки параметров или коэффициентов фильтра АФ. Такое решение может по-прежнему эффективно использоваться путем установки стандартных значений коэффициентов фильтра АФ, предварительно рассчитанных на основе исходной компромиссной ситуации, а затем, в ходе явления скольжения, изменения погрешности Е(Т) на входе фильтра АФ достаточны для реализации в реальном времени правильной коррекции коэффициентов или параметров фильтра.
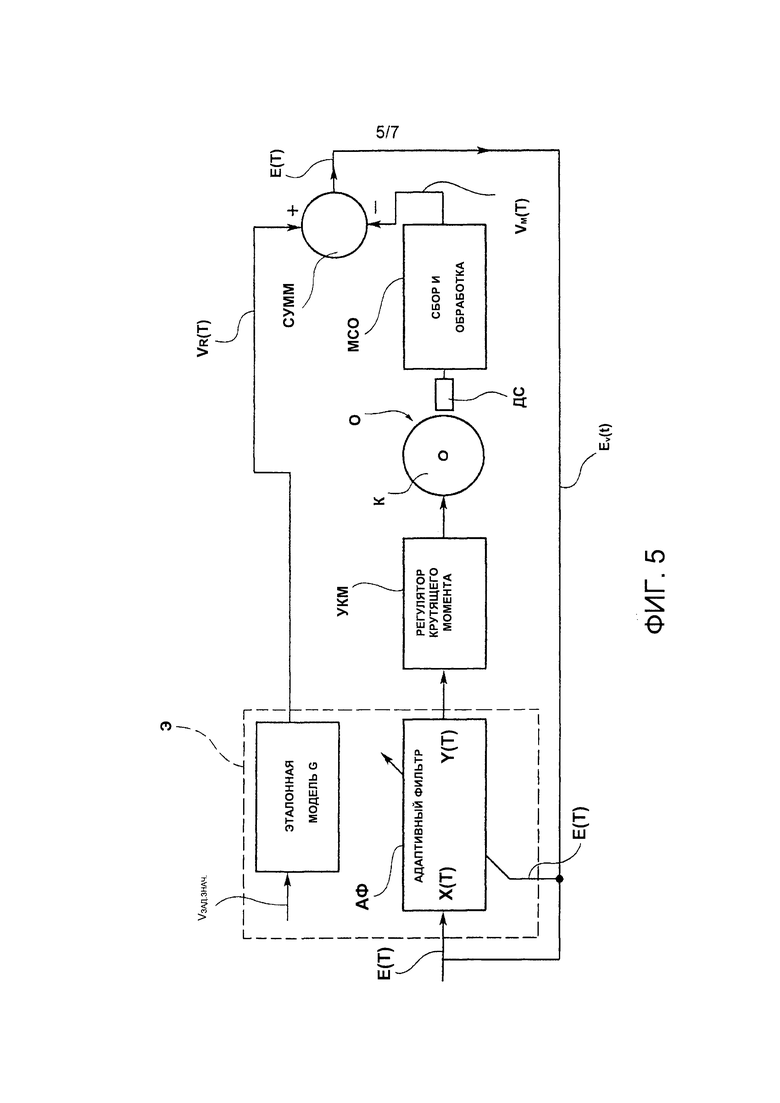
Альтернативное решение проиллюстрировано на рис. 5: погрешность Е(Т) используется не только как поправочный коэффициент адаптивного алгоритма, реализованного фильтром АФ, но и как входной сигнал Х(Т) для самого фильтра АФ.
Фактически, погрешность Е(Т) имеет достаточное гармоническое содержание для самокалибровки фильтра АФ и в то же время содержит информацию, необходимую для генерации поправок тормозной силы, действующей на управляемую ось О.
Решение согласно фиг. 5 позволяет производить очень быструю динамическую калибровку коэффициентов или параметров адаптивного фильтра АФ, даже если первоначально эти коэффициенты или параметры были полностью обнулены.
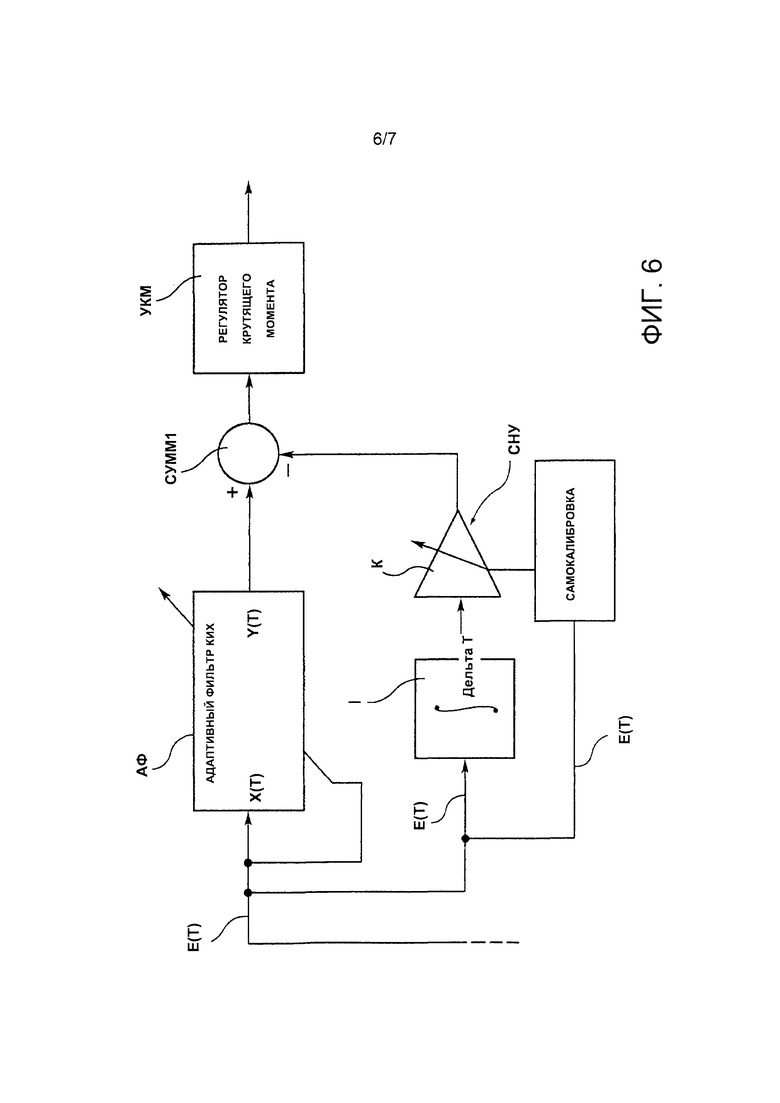
Как известно из литературы, МСО-алгоритмы адаптивной фильтрации сигналов могут быть реализованы как с использованием структур КИХ, так и структур БИХ.
Структуры КИХ по своей природе устойчивы, не имеют памяти. Тем не менее, эта функция препятствует реализации управляющих функций, имеющих интегративный компонент, если только не использовать существующие естественные интеграторы ниже по потоку в системе, например естественную интеграцию, представленную тормозным цилиндром.
На фиг. 6 показан вариант осуществления, который позволяет преодолеть недостаток интегративного компонента в адаптивном фильтре АФ типа МСО, создаваемом структурой КИХ. Интегратор И по существу располагается параллельно этому адаптивному фильтру АФ между входом этого фильтра и сумматором СУММ1, который принимает выходной сигнал фильтра АФ и выходной сигнал интегратора И; выходной сигнал сумматора СУММ1 соединен с устройством управления крутящим моментом УКМ.
Самонастраивающееся устройство СНУ может быть, как вариант, связано с интегратором И и включать в себя выделенную ячейку Я типа МСО, подсоединенную между выходом интегратора И и сумматором СУММ1 и управляемую посредством функции сигнала ошибки Е(Т).
В общем, при осуществления способа регулирования в соответствии с настоящим изобретением во избежание проблем с отклонениями в коэффициентах адаптивного фильтра во время выполнения метода можно ограничить изменение коэффициентов адаптивного фильтра до безопасного диапазона значений, хранящихся в энергонезависимой памяти.
Для поддержания управления, способного всегда реагировать на новые вариации внешних параметров системы, надлежащим образом используется характеристика функции утечки адаптивных фильтров для непрерывного рассогласования коэффициентов или параметров фильтра, когда ошибка Е(Т) близка к нулю или в любом случае в пределах изменения коэффициентов или параметров, таких как возможность восстановления правильной настройки этих коэффициентов или параметров, как только они повторно представляют значения Е(Т).
Также в объем настоящего изобретения включены варианты реализации, в которых используется адаптивный фильтр, выполненный с использованием структуры типа БИХ, которая может иметь конфигурацию ПИД-типа (пропорционально-интегративно-деривативная).
Естественно, без изменения принципа изобретения варианты осуществления и детали конструкции могут широко варьироваться в зависимости от описанных и проиллюстрированных исключительно в качестве неограничивающего примера, не отходя тем самым от объема изобретения, определенного в прилагаемой формуле изобретения.
Предложен способ регулирования сцепления колес регулируемой оси железнодорожного подвижного состава и возможного его восстановления. Генерируют сигналы скорости (VM), указывающие угловую скорость колес указанной оси. Генерируют сигнал погрешности (Е), указывающий на погрешность или разницу между контрольной скоростью (VR) для колес (К), определяемой с помощью эталонной модели (ЭМ) в ответ на заданное значение скорости (VЗАД.ЗНАЧ.), и скоростью, определяемой по упомянутым сигналам скорости (VM). Генерируют приводной сигнал (Y) для средств управления крутящим моментом (УКМ), применяемых в отношении колес упомянутой оси, посредством адаптивной фильтрации (АФ) входного сигнала (X), являющегося функцией упомянутой заданной скорости (VSETPOINT), изменяя параметры адаптивной фильтрации (АФ) как функцию упомянутого сигнала погрешности (Е), например, для возникновения упомянутой погрешности скорости или разности (Е), стремящихся к нулю. Достигается управление и восстановление сцепления колес управляемой оси железнодорожного подвижного состава. 8 з.п. ф-лы, 8 ил.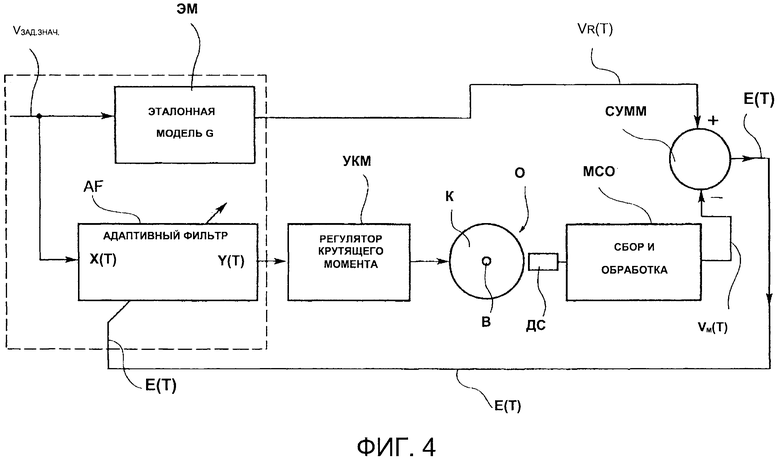
1. Способ регулирования сцепления колес (К) регулируемой оси (О) железнодорожного подвижного состава и возможного его восстановления, содержащий этапы
генерации сигналов скорости (VM), указывающих угловую скорость колес (К) указанной оси (О);
генерации сигнала погрешности (Е), указывающий на погрешность или разницу между контрольной скоростью (VR) для колес (К), определяемой с помощью эталонной модели (ЭМ) в ответ на заданное значение скорости (VЗАД.ЗНАЧ.), и скоростью, определяемой по упомянутым сигналам скорости (VM); а также
генерации приводного сигнала (Y) для средств управления крутящим моментом (УКМ), применяемых в отношении колес (К) упомянутой оси (О), посредством адаптивной фильтрации (АФ) входного сигнала (X), являющегося функцией упомянутой заданной скорости (VSETPOINT), изменяя параметры адаптивной фильтрации (АФ) как функцию упомянутого сигнала погрешности (Е), например, для возникновения упомянутой погрешности скорости или разности (Е), стремящихся к нулю.
2. Способ по п. 1, в котором упомянутый входной сигнал (X) представляет собой сигнал упомянутой заданной скорости (VSETPOINT).
3. Способ по п. 1, в котором упомянутый входной сигнал (X) представляет собой сигнал упомянутой погрешности или разности скоростей (Е).
4. Способ по одному из предшествующих пунктов, в котором указанный приводной сигнал (Y) генерируется посредством адаптивного фильтра (АФ), имеющего структуру типа КИХ, с параллельным интегратором (И).
5. Способ по п. 3, в котором сигнал, предоставляемый интегратором (И), подвергается адаптивной калибровке.
6. Способ по любому из пп. 1-3, в котором приводной сигнал (Y) получают с помощью адаптивного фильтра (АФ), имеющего структуру типа БИХ и предпочтительно конфигурацию ПИД-типа.
7. Способ по п. 1, в котором устанавливаются стандартные значения параметров или коэффициентов адаптивной фильтрации по предварительно рассчитанным значениям, хранящимся в энергонезависимой памяти.
8. Способ по п. 1 или 7, в котором параметры или коэффициенты адаптивной фильтрации ограничены заранее определенной полосой изменения и хранятся в энергонезависимой памяти.
9. Способ по п. 1 или 7, в котором посредством функции утечки адаптивной фильтрации параметры или коэффициенты упомянутой фильтрации непрерывно уменьшаются в течение времени.
| RU 95105450 A1, 10.11.1996 | |||
| СПОСОБ ДИНАМИЧЕСКОГО УПРАВЛЕНИЯ ТЯГОВЫМ УСИЛИЕМ КОЛЕС ЛОКОМОТИВА | 2004 |
|
RU2371337C2 |
| СПОСОБ ПРОИЗВОДСТВА АГЛОПОРИТАЗаявлено 12 ноября 1962 г. за Л» 802222/29-14 » Комитет по делам изобретений и открытий при Совете Л\иннстров СССРОпубликовано в «Бюллетене изобретений и товарных знаков» .Ys 15 за 1963 г. | 0 |
|
SU156444A1 |

