Изобретение относится к подводным техническим средствам для исследования и освоения мирового океана, а именно к автономным необитаемым подводным аппаратам (далее ПА). К наиболее важным показателям подводных аппаратов относятся их автономность (дальность хода), состав и характеристики полезной нагрузки, масса и габаритные характеристики. Поэтому при создании ПА особое внимание уделяют именно этим техническим характеристикам. Существенными для ПА является также технологичность конструкции и удобство технического обслуживания.
Учитывая многолетнюю продолжительность жизненного цикла ПА становится необходимым уже на стадии проектирования учитывать возможность изменения внешних условий, среди которых не только проектно-технические, но производственные, эксплуатационные, а также социально-политические обстоятельства. Изменения могут по-разному отразиться на конструкции ПА с учетом того, что каждый подводный аппарат уникален и конфигурируется под конкретные задачи заказчика. Такая технологическая модель создания новых образцов подводной робототехники, ориентированная на решение конкретных задач, оказывается весьма затратной и затягивается по времени. На основании изложенного представляется целесообразным определить прежде всего базовую транспортно-управляющую конфигурацию ПА, а затем установить регламенты интеграции сменной полезной нагрузки под установленные задачи. При этом под сменной полезной нагрузкой для ПА в настоящей заявке (в заявляемом техническом решении) следует понимать сменную научно-исследовательскую аппаратуру и оборудование, установленное на ПА, для выполнения научно-исследовательских и других задач заказчика на конкретный момент времени на созданной ранее базовой транспортно-управляющей конфигурации ПА. Следует иметь в виду также, что на практике в течение даже одного выхода в море обеспечивающего судна с ПА состав полезной нагрузки может меняться неоднократно в зависимости от плана исследовательских работ.
Известен подводный аппарат (патент РФ RU №2116930, МПК B63G 8/00, опубл. 10.08.1998 г., бюл. №22). Данный подводный аппарат выбран в качестве аналога предлагаемого изобретения. Подводный аппарат содержит несущую конструкцию, водонепроницаемые прочные контейнеры, блоки плавучести и обтекатели. Обтекатели выполнены в виде четырех одинаковых частей удобообтекаемой оболочки с плоскостями разъема, проходящими через продольную ось аппарата. В ПА использованы обтекатели, заполненные прочным плавучим материалом и соединенные между собой посредством жестких концевых элементов. Обтекатели выполнены легкосъемными и установлены между жесткими концевыми элементами и обтекателями. Между обтекателями размещены блоки плавучести. В блоках плавучести установлены перпендикулярно продольной оси аппарата прочные контейнеры.
К недостаткам данного аппарата следует отнести высокое лобовое сопротивление аппарата, вследствие того, что его прочные контейнеры устанавливаются в блоках плавучести только перпендикулярно продольной оси ПА. Следовательно, если состав и характеристики сменной полезной нагрузки, содержащейся в прочном контейнере, потребуют увеличение его длины, это приведет к увеличению диаметра поперечного сечения ПА и увеличение его лобового сопротивления со всеми вытекающими отсюда негативными последствиями.
Известен также подводный аппарат (патент РФ RU №2310579, МПК МПК B63G 8/00, опубл. 20.11.2007 г., бюл. №32). Известный ПА содержит несущую конструкцию, по меньшей мере, два шпангоута, прочные контейнеры, разъемные и неразъемные блоки плавучести и обтекатели. Несущая конструкция ПА выполнена в виде последовательно и жестко соединенных между собой в направлении продольной оси подводного аппарата с возможностью разъема и с возможностью различной ориентации относительно друг друга каркасов коробчатой формы. Шпангоуты установлены в носовой и кормовой частях ПА, между каркасами коробчатой формы и жестко соединены с ними. Каждый шпангоут образован двумя силовыми кольцевыми дисками, жестко соединенными между собой посредством втулок, и снабжен съемным рымом, при этом ось каждого шпангоута совпадает с продольной осью подводного аппарата. Прочные корпуса выполнены со съемными торцевыми крышками и установлены внутри каркасов коробчатой формы перпендикулярно продольной оси подводного аппарата. Разъемные блоки плавучести выполнены с отверстиями под прочные корпуса и установлены внутри каркасов коробчатой формы. Неразъемные блоки плавучести установлены снаружи каркасов коробчатой формы. Обтекатели установлены со стороны торцевых крышек прочных корпусов и совместно с неразъемными блоками плавучести формируют внешние обводы подводного аппарата. Оснащение ПА, двумя шпангоутами, обеспечило повышение жесткости и надежности его несущей конструкции, а наличие у каждого шпангоута съемного рыма обеспечило возможность выполнения спускоподъемных операций.
Известный ПА является наиболее близким по технической сущности к заявляемому устройству и принят в качестве прототипа. Недостатками прототипа являются:
- аппарат не имеет конструктивной возможности размещения на нем любой сменной полезной нагрузки, в том числе выходящей за внешние обводы аппарата;
- аппарат имеет крайне ограниченные возможности регулирования его остаточной плавучести и избыточного дифферентирующего момента, это связано с тем, что устанавливаемая сменная полезная нагрузка может быть очень «тяжелой» или «легкой»;
- аппарат имеет высокое лобовое сопротивление, обусловленное поперечным расположение прочных корпусов в каркасах коробчатой формы, что значительно снижает его автономность и скорость хода, при фиксированном запасе энергии его аккумуляторной батареи;
- кольцевые двойные шпангоуты ПА имеют неоправданно сложную конструкцию, для малых аппаратов.
Перечисленные недостатки ограничивают функциональные возможности подводного аппарата и снижают его технические характеристики.
В основу заявляемого изобретения поставлена задача исключить указанные недостатки и расширить функциональные возможности подводного аппарата за счет создания базовой транспортно-управляющей конфигурации ПА с универсальной несущей корпусной конструкции, обеспечивающей высокую технологичность процессов установки и замены сменной полезной нагрузки на подводном аппарате, включая также возможность размещения на нем сменной полезной нагрузки, конструктивные элементы которой выступают за внешние обводы подводного аппарата.
Поставленная задача достигается тем, что в подводном аппарате, содержащем несущую конструкцию, прочные корпуса, разъемные и неразъемные блоки плавучести и обтекатели, в котором несущая конструкция выполнена в виде последовательно и жестко соединенных между собой в направлении продольной оси подводного аппарата с возможностью разъема и с возможностью различной ориентации относительно друг друга каркасов коробчатой формы, прочные корпуса выполнены со съемными торцевыми крышками и установлены внутри каркасов коробчатой формы, разъемные блоки плавучести выполнены с отверстиями под прочные корпуса и установлены внутри каркасов коробчатой формы, неразъемные блоки плавучести установлены снаружи каркасов коробчатой формы, обтекатели совместно с неразъемными блоками плавучести формируют внешние обводы подводного аппарата, шпангоуты установлены в носовой и кормовой частях подводного аппарата между каркасами коробчатой формы и жестко соединены с ними с возможностью разъема, при этом ось каждого шпангоута совпадает с осью подводного аппарата и каждый шпангоут снабжен съемным рымом, несущая конструкция дополнительно снабжена, по крайней мере, двумя каркасами коробчатой формы, функционально связанных и жестко соединенных с возможностью разъема и с возможностью различной ориентации как между собой так и относительно прилегающих к ним каркасов коробчатой формы несущей конструкции, причем один из каркасов коробчатой формы интегрирован под установку сменной полезной нагрузки с возможностью также размещения негабаритных конструктивных элементов последней за внешними обводами аппарата, а другой каркас коробчатой формы интегрирован под размещение дополнительного блока плавучести, для компенсации веса сменной полезной нагрузки, при этом в кормовой оконечности подводного аппарата, в его диаметральной плоскости и соосно его продольной оси, установлена проницаемая емкость с размещенными в ней сменными грузами для регулировки дифферентирующего момента аппарата.
Поставленная задача достигается также тем, что в подводном аппарате:
- дополнительный блок плавучести выполнен из разъемных и неразъемных блоков плавучести, причем разъемные блоки плавучести установлены внутри каркаса коробчатой формы, а неразъемные блоки плавучести установлены снаружи каркаса коробчатой формы;
- прочные корпуса установлены внутри каркасов коробчатой формы так, что продольная ось каждого прочного корпуса соосна продольной оси подводного аппарата;
- в средней его части дополнительно установлены два шпангоута, которые снабжены съемными рымами, причем каждый шпангоут выполнен в виде одного кольцевого диска.
В заявленном подводном аппарате общими существенными признаками для него и для его прототипа являются:
- подводный аппарат, содержащий несущую конструкцию, прочные корпуса, разъемные и неразъемные блоки плавучести и обтекатели;
- несущая конструкция выполнена в виде последовательно и жестко соединенных между собой в направлении продольной оси подводного аппарата с возможностью разъема и с возможностью различной ориентации относительно друг друга каркасов коробчатой формы;
- прочные корпуса выполнены со съемными торцевыми крышками и установлены внутри каркасов коробчатой формы;
- разъемные блоки плавучести выполнены с отверстиями под прочные корпуса и установлены внутри каркасов коробчатой формы;
- неразъемные блоки плавучести установлены снаружи каркасов коробчатой формы;
- обтекатели совместно с неразъемными блоками плавучести формируют внешние обводы подводного аппарата;
- шпангоуты установлены в носовой и кормовой частях подводного аппарата между каркасами коробчатой формы и жестко соединены с ними с возможностью разъема, при этом ось каждого шпангоута совпадает с осью подводного аппарата и каждый шпангоут снабжен съемным рымом.
Сопоставительный анализ существенных признаков заявленного подводного аппарата и его прототипа показывает, что первый в отличие от прототипа имеет следующие существенные отличительные признаки:
- несущая конструкция подводного аппарата дополнительно снабжена, по крайней мере, двумя каркасами коробчатой формы, функционально связанных и жестко соединенных с возможностью разъема и с возможностью различной ориентации как между собой, так и относительно прилегающих к ним каркасов коробчатой формы несущей конструкции,
- один из каркасов коробчатой формы интегрирован под установку сменной полезной нагрузки с возможностью также размещения негабаритных конструктивных элементов последней за внешними обводами аппарата,
- другой каркас коробчатой формы интегрирован под размещение дополнительного блока плавучести, для компенсации веса сменной полезной нагрузки,
- в кормовой оконечности подводного аппарата, в его диаметральной плоскости и соосно его продольной оси, установлена проницаемая емкость с размещенными в ней сменными грузами для регулировки дифферентирующего момента аппарата,
- дополнительный блок плавучести выполнен из разъемных и неразъемных блоков плавучести, причем разъемные блоки плавучести установлены внутри каркаса коробчатой формы, а неразъемные блоки плавучести установлены снаружи каркаса коробчатой формы.
- прочные корпуса установлены внутри каркасов коробчатой формы так, что продольная ось каждого прочного контейнера соосна продольной оси подводного аппарата.
- в средней его части дополнительно установлены два шпангоута, которые снабжены съемными рымами, причем каждый шпангоут выполнен в виде одного кольцевого диска.
Отличительные признаки предлагаемого решения выполняют следующие функциональные задачи для достижения требуемого технического результата.
Признаки: «… несущая конструкция подводного аппарата дополнительно снабжена, по крайней мере, двумя каркасами коробчатой формы, функционально связанных и жестко соединенных с возможностью разъема и с возможностью различной ориентации как между собой, так и относительно прилегающих к ним каркасов коробчатой формы несущей конструкции, причем один из каркасов коробчатой формы интегрирован под установку сменной полезной нагрузки с возможностью также размещения негабаритных конструктивных элементов последней за внешними обводами аппарата, а другой каркас коробчатой формы интегрирован под размещение дополнительного блока плавучести, для компенсации веса сменной полезной нагрузки …» обеспечивают расширение функциональных возможностей ПА за счет создания для одной базовой транспортно-управляющей конфигурации подводного аппарата, усовершенствованной универсальной несущей конструкции с возможностью установки и размещения в ней сменной полезной нагрузки для выполнения совершенно различных исследований и работ. Универсальность одного из каркасов коробчатой формы заключается в том, что в нем конструктивно предусмотрена возможность размещения и установки сменной полезной нагрузки различного назначения, т.е. той, которая необходима для выполнения конкретно поставленной задачи в установленное время. После выполнения определенных задач исследований и работ эту сменную полезную нагрузку снимают с подводного аппарата и устанавливают другую сменную полезную нагрузку для выполнения уже другой задачи, другого исследования или другой работы. В упомянутом выше универсальном каркасе коробчатой формы предусмотрена также возможность установки сменной полезной нагрузки, негабаритные конструктивные элементы которой выходят за внешние обводы аппарата. В данном универсальном каркасе коробчатой формы предусмотрена возможность функционального подключения сменной полезной нагрузки ко всем функциональным системам ПА. Универсальность другого каркаса коробчатой формы заключается в том, что в нем каждый раз размещаются блоки плавучести для компенсации веса той сменной полезной нагрузки, которая размещена в данный момент в предыдущем каркасе коробчатой формы, а также обеспечения нулевой остаточной плавучести ПА в целом.
Признак «… в кормовой оконечности подводного аппарата, в его диаметральной плоскости и соосно его продольной оси, установлена проницаемая емкость с размещенными в ней сменными грузами для регулировки дифферентирующего момента аппарата» способствует осуществлению точной регулировки наклона подводного аппарата в диаметральной плоскости после установки на нем другой сменной полезной нагрузки и для приведения аппарата на ровный киль.
Таким образом, базовая транспортно-управляющая конфигурация подводного аппарата остается неизменной, а его функциональные возможности расширяются за счет создания универсальной корпусной конструкции, а именно несущей, конструктивные особенности которой позволяют менять сменную полезную нагрузку под выполнение различных конкретных задач.
Таким образом, заявленное изобретение исключает необходимость разработки и изготовления подводных аппаратов под выполнение каждой конкретно задачи в отдельности.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом, т.е. благодаря данной совокупности существенных признаков изобретения стало возможным решение поставленной задачи. Указанные существенные признаки, отличающие заявленный подводный аппарат от прототипа, в совокупности с признаками общими для него и прототипа, обеспечивают достижение заявленного технического результата во всех случаях, на которые распространяется объем правовой охраны.
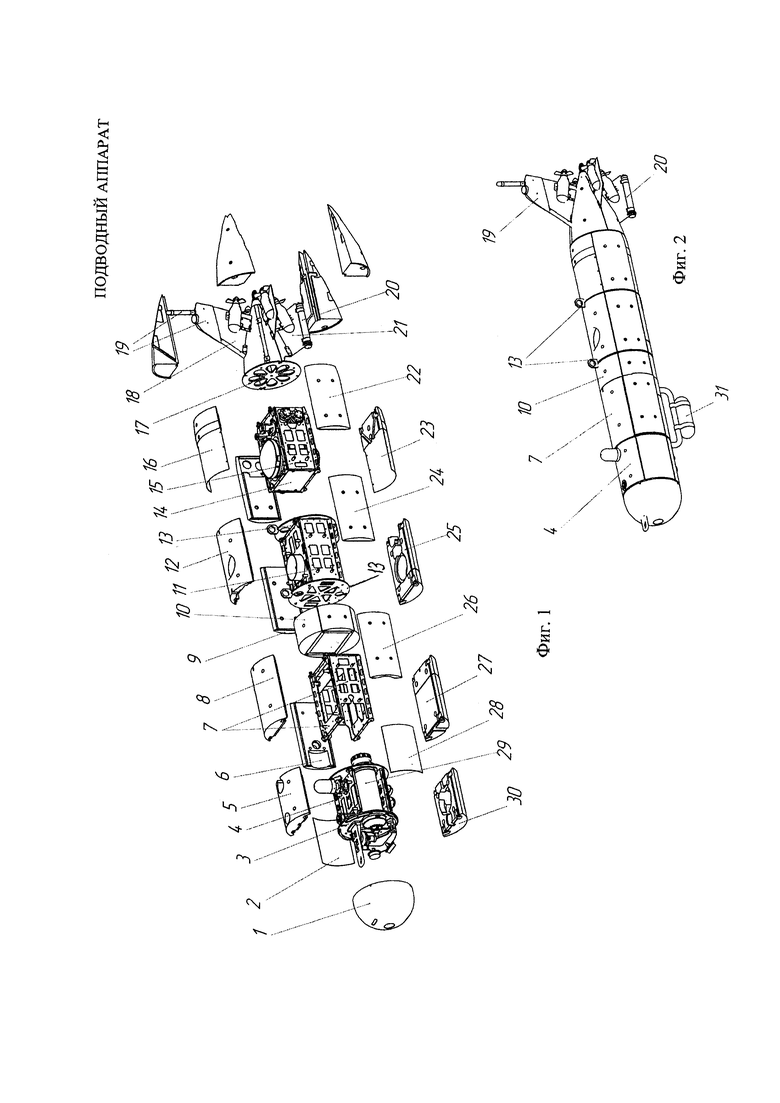
Сущность изобретения поясняется чертежами, где на фиг. 1 приведена схема подводного аппарата с разнесенными элементами, на которой обозначены:
1 - носовой обтекатель;
2, 28 - бортовые обтекатели;
3, 13, 17 - круглые шпангоуты;
4 - каркас коробчатой формы с продольным расположением прочного контейнера под размещение в нем функциональных систем аппарата;
5, 8, 12, 16 - неразъемные верхние наружные блоки плавучести;
6, 9, 22, 24, 26 - неразъемные боковые наружные блоки плавучести;
7 - дополнительный каркас коробчатой формы под сменную полезную нагрузку (пустой);
10 - дополнительный блок плавучести, формируемый на базе дополнительного каркаса коробчатой формы;
11, 15 - каркасы коробчатой формы для размещения функциональных систем аппарата (пустые);
14 - разъемный внутренний блок плавучести;
18 - верхний вертикальный стабилизатор;
19 - комплексное антенное устройство;
20 - центровочная проницаемая емкость, с размещенными в ней сменными грузами для регулировки дифферентирующего момента аппарата;
21 - нижний вертикальный стабилизатор;
23, 25, 27, 30 - неразъемные нижние наружные блоки плавучести;
29 - продольный прочный контейнер.
На фиг. 2 показан общий вид подводного аппарата в изометрии, на котором обозначена:
31 - конструктивный элемент сменной полезной нагрузки, выступающий за внешние обводы подводного аппарата.
Подводный аппарат содержит несущую конструкцию, прочные корпуса, разъемные и неразъемные блоки плавучести и обтекатели. Несущая конструкция выполнена в виде последовательно и жестко соединенных между собой в направлении продольной оси подводного аппарата с возможностью разъема и с возможностью различной ориентации относительно друг друга каркасов 4, 7, 11, 15 коробчатой формы (далее каркасы) (фиг. 1). Каркасы 4, 11, 15 коробчатой формы для размещения в них функциональных систем, обеспечивающих работу самого аппарата с размещением, в случае необходимости, этих систем в прочных контейнерах 29 со съемными торцевыми крышками. Внутри каркасов 4, 11, 15 функционального назначения установлены прочные контейнера 29 так, что продольная ось каждого прочного контейнера соосна продольной оси подводного аппарата (на фиг. 1 показано только на каркасе 4).
Каркас 7 предназначен для размещения любой сменной полезной нагрузки (фиг. 1), даже выходящей за внешние обводы аппарата (фиг. 2 поз. 31). Между каркасами 7 и 11 размещен еще один каркас (на чертеже позиция не обозначена) под формирование и размещение дополнительного блока 10 плавучести, предназначенного для компенсации веса сменной полезной нагрузкой, установленной в каркасе 7, и обеспечения нулевой остаточной плавучести аппарата в целом.
Дополнительный блок плавучести 10 выполнен из разъемных и неразъемных блоков плавучести, причем разъемные блоки плавучести установлены внутри каркаса, а неразъемные блоки плавучести установлены снаружи каркаса (фиг. 1).
Подводный аппарат снабжен круглыми шпангоутами 3, 13, 17, установленными в носовой, средней и кормовой частях аппарата (фиг. 1, фиг. 2) между каркасами и жестко соединены с ними с возможностью разъема, при этом ось каждого шпангоута совпадает с осью ПА. Шпангоуты 13, установленные в средней части аппарата, снабжены съемными рымами. Каждый шпангоут выполнен в виде одного кольцевого диска.
Разъемные блоки 14 плавучести с отверстиями под прочные контейнера 29 и установлены внутри каркасов, неразъемные блоки плавучести, а именно верхние блоки 5, 8, 12, 16, боковые блоки 6, 9, 22, 24, 26 и нижние блоки 23, 25, 27, 30 установлены снаружи каркасов.
Обтекатели 1, 2, 28 совместно с неразъемными блоками плавучести формируют внешние обводы ПА (фиг. 2). В кормовой оконечности ПА, а именно, на его нижнем вертикальном стабилизаторе, в его диаметральной плоскости и соосно его продольной оси, установлена центровочная проницаемая емкость 20 с размещенными в ней сменными грузами для продольной центровки аппарата, т.е. компенсации избыточного дифферентующего момента.
Базовая транспортно-управляющая конфигурация ПА (далее базовый ПА) спроектирована и изготовлена ранее с учетом обеспечения расширения функциональных возможностей базового ПА в области использования за счет замены в нем сменной полезной нагрузки, в предусмотренных для этого в несущей конструкции базового ПА универсальных каркасах коробчатой формы.
Монтаж и сборка базового ПА, в части замены сменной полезной нагрузки на нем на другую для выполнения иной области использования ПА, осуществляется в следующей последовательности:
- размещают базовый ПА на сборочном стапеле;
- в несущей конструкции базового ПА снимают крепежные средства (болты), которые фиксируют в ней положение двух дополнительных каркасов, а именно каркаса 7 под сменную полезную нагрузку, и каркаса, предназначенного под формирование дополнительного блока 10 плавучести;
- перемещают эти два дополнительных каркаса на монтажно-сборочный стол;
- в каркас 7 устанавливают сменную полезную нагрузку, выполняют необходимые монтажные работы, фиксируют сменную полезную нагрузку в каркасе 7 и определяют ее общий вес;
- затем, в другом дополнительном каркасе формируют дополнительный блок 10 плавучести из разъемных и неразъемных блоков плавучести, общая подъемная сила которых компенсирует вес сменной полезной нагрузки, установленной в каркасе 7;
- оснащенные таким образом дополнительные каркасы переносят на монтажно-сборочный стол, устанавливают в несущую конструкцию базового ПА в необходимой последовательности и направлении к продольной оси базового ПА и с необходимой ориентацией относительно друг друга и прилегающих к ним каркасов;
- после чего снятые при демонтаже крепежные средства устанавливают на место и жестко фиксируют ими дополнительные каркасы в составе несущей конструкции базового ПА;
- подсоединяют сменную полезную нагрузку к электронным системам базового ПА при помощи универсального электрического разъема и выполняют затем стандартные монтажные и наладочные работы для обеспечения работоспособности базового ПА в целом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ АППАРАТ | 2006 |
|
RU2310579C1 |
| ПОДВОДНЫЙ АППАРАТ | 1996 |
|
RU2116930C1 |
| Малогабаритный многофункциональный автономный необитаемый подводный аппарат - носитель сменной полезной нагрузки | 2018 |
|
RU2681415C1 |
| СПОСОБ СОЕДИНЕНИЯ МОНОБЛОКОВ ИЗ СФЕРОПЛАСТИКА В СОСТАВНЫЕ БЛОКИ ПЛАВУЧЕСТИ | 2020 |
|
RU2800090C2 |
| ПОДВОДНОЕ СУДНО ДЛЯ ОБСЛУЖИВАНИЯ ПОДВОДНЫХ ДОБЫЧНЫХ КОМПЛЕКСОВ НА АРКТИЧЕСКОМ ШЕЛЬФЕ И ДРУГИХ ПОДВОДНО-ТЕХНИЧЕСКИХ РАБОТ | 2016 |
|
RU2629625C1 |
| СПОСОБ СОЕДИНЕНИЯ МОНОБЛОКОВ ИЗ СФЕРОПЛАСТИКА В СОСТАВНЫЕ БЛОКИ ПЛАВУЧЕСТИ | 2023 |
|
RU2815901C1 |
| ПОДВОДНАЯ ЛОДКА ПЛПИ | 1993 |
|
RU2081022C1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2016 |
|
RU2613181C1 |
| ПОДВОДНЫЙ МОДУЛЬ ДЛЯ ПРОИЗВОДСТВА ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ | 2016 |
|
RU2608843C1 |
| Глубоководный АНПА большого водоизмещения сверхбольшой автономности с комбинированным способом соединения модулей корпусной конструкции | 2019 |
|
RU2725945C1 |
Изобретение относится к подводным техническим средствам для исследования и освоения мирового океана, а именно к автономным необитаемым подводным аппаратам (ПА). ПА содержит несущую конструкцию в виде последовательно и жестко соединенных между собой в направлении продольной оси ПА с возможностью разъема и с возможностью различной ориентации относительно друг друга каркасов коробчатой формы; прочные корпуса, установленные внутри каркасов; разъемные блоки плавучести, установленные внутри каркасов; и неразъемные блоки плавучести, установленные снаружи каркасов и формирующие совместно с обтекателями внешние обводы ПА. Между каркасами установлены шпангоуты. Несущая конструкция дополнительно снабжена по крайней мере двумя каркасами коробчатой формы, один из которых интегрирован под установку сменной полезной нагрузки с возможностью размещения негабаритных конструктивных элементов последней за внешними обводами ПА, а другой каркас интегрирован под размещение дополнительного блока плавучести для компенсации веса сменной полезной нагрузки. В кормовой оконечности ПА в его ДП и соосно его продольной оси установлена проницаемая емкость со сменными грузами для регулировки дифферентирующего момента ПА. Технический результат заключается в расширении функциональных возможностей и улучшении технических характеристик ПА. 3 з.п. ф-лы, 2 ил.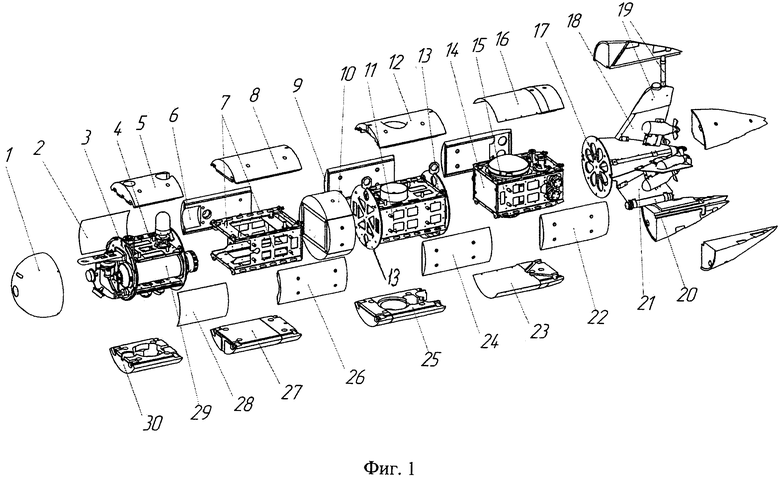
1. Подводный аппарат, содержащий несущую конструкцию, прочные корпуса, разъемные и неразъемные блоки плавучести и обтекатели, в котором несущая конструкция выполнена в виде последовательно и жестко соединенных между собой в направлении продольной оси подводного аппарата с возможностью разъема и с возможностью различной ориентации относительно друг друга каркасов коробчатой формы, прочные корпуса выполнены со съемными торцевыми крышками и установлены внутри каркасов коробчатой формы, разъемные блоки плавучести выполнены с отверстиями под прочные корпуса и установлены внутри каркасов коробчатой формы, неразъемные блоки плавучести установлены снаружи каркасов коробчатой формы, обтекатели совместно с неразъемными блоками плавучести формируют внешние обводы подводного аппарата, шпангоуты установлены в носовой и кормовой частях подводного аппарата между каркасами коробчатой формы и жестко соединены с ними с возможностью разъема, при этом ось каждого шпангоута совпадает с осью подводного аппарата и каждый шпангоут снабжен съемным рымом, отличающийся тем, что несущая конструкция подводного аппарата дополнительно снабжена по крайней мере двумя каркасами коробчатой формы, функционально связанными и жестко соединенными с возможностью разъема и с возможностью различной ориентации как между собой, так и относительно прилегающих к ним каркасов коробчатой формы несущей конструкции, причем один из каркасов коробчатой формы интегрирован под установку сменной полезной нагрузки с возможностью также размещения негабаритных конструктивных элементов последней за внешними обводами аппарата, а другой каркас коробчатой формы интегрирован под размещение дополнительного блока плавучести для компенсации веса сменной полезной нагрузки, при этом в кормовой оконечности подводного аппарата в его диаметральной плоскости и соосно его продольной оси установлена проницаемая емкость с размещенными в ней сменными грузами для регулировки дифферентирующего момента аппарата.
2. Подводный аппарат по п. 1, отличающийся тем, что дополнительный блок плавучести выполнен из разъемных и неразъемных блоков плавучести, причем разъемные блоки плавучести установлены внутри каркаса коробчатой формы, а неразъемные блоки плавучести установлены снаружи каркаса коробчатой формы.
3. Подводный аппарат по п. 1, отличающийся тем, что прочные корпуса установлены внутри каркасов коробчатой формы так, что продольная ось каждого прочного контейнера соосна продольной оси подводного аппарата.
4. Подводный аппарат по п. 1, отличающийся тем, что в средней его части дополнительно установлены два шпангоута, которые снабжены съемными рымами, причем каждый шпангоут выполнен в виде одного кольцевого диска.
| ПОДВОДНЫЙ АППАРАТ | 2006 |
|
RU2310579C1 |
| SU 1667335 A3, 10.1999 | |||
| ПОДВОДНЫЙ АППАРАТ | 1996 |
|
RU2116930C1 |
| CN 107380383 A, 24.11.2017 | |||
| WO 2011139157 A1, 10.11.2011. | |||

