Изобретение относится к подводному судостроению, в частности к применению модульного принципа проектирования несущей корпусной конструкции, к компоновке автономных необитаемых подводных аппаратов (АНПА) большого водоизмещения, эксплуатируемых на больших глубинах.
В современной практике судостроительной отрасли АНПА большого водоизмещения проектируются для выполнения определенной узкой задачи. Для переориентации направленности спроектированного и построенного аппарата необходимо организовывать длительную и дорогостоящую процедуру модернизации.
Известны следующие основные типы несущей конструкции АНПА большого водоизмещения:
1) рамная, с размещением оборудования в отдельных прочных навесных корпусах (беспилотная подводная лодка «Echo Voyager» компании «Boeing»);
2) корпусная, с размещением оборудования внутри единого прочного корпуса.
Для АНПА большого водоизмещения применение рамной несущей конструкции приводит к росту массогабаритных характеристик, материалоемкости и трудоемкости изготовления изделия в результате увеличения номенклатуры и общей массы металлических конструкций (массивные прочные корпуса монтируются на массивную раму). Применение корпусной несущей конструкции лишено этого недостатка, но из-за ограничения доступа к внутреннему пространству не позволяет производить замену установленного оборудования без привлечения специализированных предприятий и проектанта.
Принцип модульного проектирования давно известен и лишен указанных недостатков. В патенте на изобретение RU 2223887 С1 от 10.11.2002 г. описан подводный аппарат, содержащий функциональные модули отсеков и коммуникации между ними, отличающийся тем, что каждый из функциональных модулей отсеков заключен в автономный корпус и обладает индивидуальной плавучестью, все функциональные модули отсеков соединены между собой переходными отсеками с коммуникациями, при этом все корпуса всех функциональных модулей отсеков и переходных отсеков с коммуникациями образуют единую внешнюю поверхность аппарата.
В патенте на изобретение RU 2553599 С1 от 14.04.2014 г. описан многокорпусный глубоководный обитаемый подводный аппарат, содержащий корпус, двигатели и движители, радиоэлектронное оборудование, средства управления и навигации, отличающийся тем, что он выполнен в виде универсальной интегрированной системы, состоящей из нескольких корпусов, расположенных в ряд, один из которых основной движущий, а остальные - взаимозаменяемые модули, соединенные герметично с основным корпусом автоматическим разъемным соединением с переходными люками сообщения между корпусами.
Недостатками указанных выше изобретений является отсутствие описания способа соединения модулей корпусной конструкции.
На фиг. 1 показано болтовое фланцевое соединение, как один из возможных способов соединения корпусных конструкций, где
1, 2 - смежные модули корпусной конструкции;
3, 4 - соединительные фланцы;
5 - болтовое соединение.
Данное решение является надежным и может применяться при сборке водонепроницаемых прочных корпусов с установкой различных типов уплотнений. Однако при наложении данного способа на функциональные особенности АНПА оно имеет ряд недостатков, а именно:
- сборка/разборка АНПА при наличии большого количества крепежа требует значительных временных затрат, в то время как концепция применения модульной конструкции заключается в снижении трудоемкости на изменение функционального назначения АНПА;
- наличие выступающих частей фланцев и болтовых соединений за пределы наружных обводов корпусной конструкции негативно сказывается на скоростных, вибрационных и гидроакустических характеристиках АНПА.
В патенте на изобретение US 7290496 В2 от 12.10.2006 г. описан АНПА модульного исполнения, модули корпусной конструкции которого соединяются при помощи множества наружных рычажных зажимов 6 (фиг. 2). Преимущество способа - снижение трудоемкости сборки/разборки корпуса по сравнению с болтовым соединением за счет возможности осуществления операций открытия/закрытия зажима без использования вспомогательного инструмента.
Недостатком является наличие выступающих частей, оказывающих негативное влияние на скоростные, вибрационные и гидроакустические характеристики АНПА. Кроме того, дополнительные сборочные операции по закреплению ответных частей зажимов на соответствующих модулях корпусной конструкции приводят к снижению надежности и удорожанию изделия.
В патенте на изобретение US 7290496 В2 от 24.03.2012 г. описан АНПА модульного исполнения, модули которого соединяются при помощи быстроразъемного соединения, показанного на фиг. 3. На фланце 3 модуля 1 расположены крепежные элементы 7 в виде винтовых штифтов. На ответном фланце 4 модуля 2 имеются Г-образные пазы 8. Соединение осуществляется путем сопоставления штифтов 7 и заводной части пазов 8.
Далее за счет поворота модуля 2 вокруг своей оси осуществляется фиксация замковой части паза 8 на штифте 7. Дополнительно соединительный фланец 4 фиксируется за счет вкручивания штифтов 7 во фланец 3. Данное техническое решение применимо только при разработке малогабаритных АНПА. При сборке АНПА с диаметром корпуса более 500 мм для осуществления сведения модулей и поворота модуля 2 необходимо использование специализированного технологического оборудования.
В патенте JP 200016386 А от 06.07.1998 г. показано изобретение, суть которого заключается в соединении модулей 1, 2 корпусной конструкции АНПА (фиг. 4) за счет обжима клиновой поверхности соединительных фланцев двумя шарнирно соединенными с одного борта полукольцами 9. После надевания на фланцы, полукольца соединяются друг с другом при помощи винтов 10, образуя кольцо.
При сборке конструкции клиновая поверхность паза 11 (фиг. 5) полуколец 9 охватывает выступающие клиновые части соединительных фланцев 3 и 4 модулей. Обжим клина происходит за счет закручивания винтов 10. Штифт 12 служит для исключения проворачивания и однозначной ориентации модулей относительно друг друга. Герметизация модулей от воздействия наружного давления воды происходит за счет применения радиального уплотнения 13. Данное соединение не имеет выступающих частей и повторяет наружные обводы корпусной конструкции.
Устройство является компактным, состоит из малого количества однотипных элементов, что делает его дешевым в производстве. Однако способ герметизации при использовании радиального уплотнения имеет существенный недостаток: для заведения фланца 3 в цилиндрическую часть фланца 4 и обжатия уплотнения 13 необходимо приложить значительное осевое усилие, при этом заведение необходимо проводить строго соосно.
Таким образом, при проектировании АНПА большого водоизмещения герметизация модулей с использованием радиального уплотнения неизбежно требует применения дорогостоящего специализированного технологического оборудования для осуществления сведения габаритных модулей.
Для отказа от использования специализированного технологического оборудования для осуществления сведения габаритных модулей возможно применение как минимум одного торцевого уплотнения 14 (фиг. 6).
В случае применения торцевого уплотнения для герметизации модулей обжатие уплотнения необходимо выполнять равномерно с определенным осевым усилием, при этом усилие обеспечивается за счет обжатия клина при затяжке винтов 10.
При проектировании АНПА большого водоизмещения, эксплуатируемого на больших глубинах, создание необходимого осевого усилия для обжатия торцевого уплотнения 14 за счет затяжки винтов 10 не представляется возможным из-за необходимости нерационального увеличения резьбовой части винтов 10 для выполнения условия прочности, что в свою очередь приводит к росту массогабаритных характеристик устройства, «разрастанию» элементов конструкции внутрь АНПА и пропорциональному уменьшению полезного объема модулей.
Аналогичное утверждение справедливо и для способов соединения, описываемых в патентах US 7290496 В2 и US 8539898 В1 (фиг. 2 и фиг. 3).
Таким образом, на основании достоинств и недостатков приведенных выше способов соединения можно сделать вывод, что при проектировании АНПА большого водоизмещения, эксплуатируемых на больших глубинах, соединение модулей с герметизацией внутреннего пространства без применения дорогостоящего специализированного технологического оборудования для сведения модулей возможно с применением торцевого уплотнения. При этом для осуществления равномерного обжатия торцевого уплотнения и надежной герметизации подходит способ болтового соединения модулей.
Суть настоящего изобретения - создание комплекса глубоководного АНПА большого водоизмещения сверхбольшой автономности модульного исполнения с комбинированным способом соединения модулей корпусной конструкции, исходя из рациональной оптимизации следующих условий:
- обеспечение надежности соединения;
- обеспечение сохранения теоретических наружных обводов корпуса;
- обеспечения возможности оперативного изменения функционального назначения АНПА в условиях судна-носителя;
- минимизация трудоемкости работ по сборке соединения;
- минимизация трудоемкости и себестоимости работ по изготовлению устройства и технологической оснастки для реализации способа соединения.
В комплекс АНПА входят базовая платформа и набор модулей полезной нагрузки.
Базовая платформа (фиг. 7) состоит из двух основных штатных модулей (энергетический 15 и модуль управления навигации и связи 16) и представляет собой АНПА, снабженный необходимым набором судовых систем, устройств, оборудования, автоматики, радио- и гидроакустических средств, а также источником энергии. Функциональным назначением базовой платформы является следование по заранее заданному маршруту с заданными скоростными режимами с возможностью определения и обхода препятствий.
Энергетический модуль 15 представляет собой однокорпусную конструкцию в виде металлического водонепроницаемого прочного корпуса со съемной металлической крышкой 17 и движительно-рулевым комплексом, в свою очередь, крышка имеет водопроницаемый силовой каркас с элементами соединительного устройства с модулем 16.
Модуль управления навигации и связи 16 представляет собой двухкорпусную конструкцию. Металлический водонепроницаемый прочный корпус аппаратуры 18 со съемной металлической крышкой 19 закреплен на водопроницаемой несущей конструкции, представляющей собой «легкий» корпус и обеспечивающей продольную и поперечную жесткость модуля. В составе «легкого» корпуса модуля 16 имеется модульная вставка 20 с вертикальными движителями.
Исходя из уже определенного функционального назначения базовой платформы, состав оборудования прочных корпусов, заложенный на этапах проектирования, в процессе эксплуатации не меняется, т.е. необходимость в переоборудовании в условиях судна-носителя отсутствует. Таким образом, соединение крышки 17 с прочным корпусом энергетического модуля осуществляется при помощи болтовых соединений 22 (фиг. 8) с использованием как минимум одного торцевого уплотнения.
Данное соединение обеспечивает надежность, герметичность и собираемость изделия без использования дополнительного технологического оборудования. Для обеспечения сохранения теоретических обводов корпусной конструкции фланец прочного корпуса 21 и крышка 17 с болтовыми соединениями 22 утоплены внутрь корпусной конструкции (фиг. 8), а вырезы в обшивке 24, предназначенные для установки болтовых соединений 22 и доступа инструмента для затяжки, закрываются сегментными вставками 25, при этом конструктивная полость фланца прочного корпуса заполняется герметиком 26 или закрывается сегментным обтекателем из композиционных материалов. Т.е. реализовано потайное болтовое соединение.
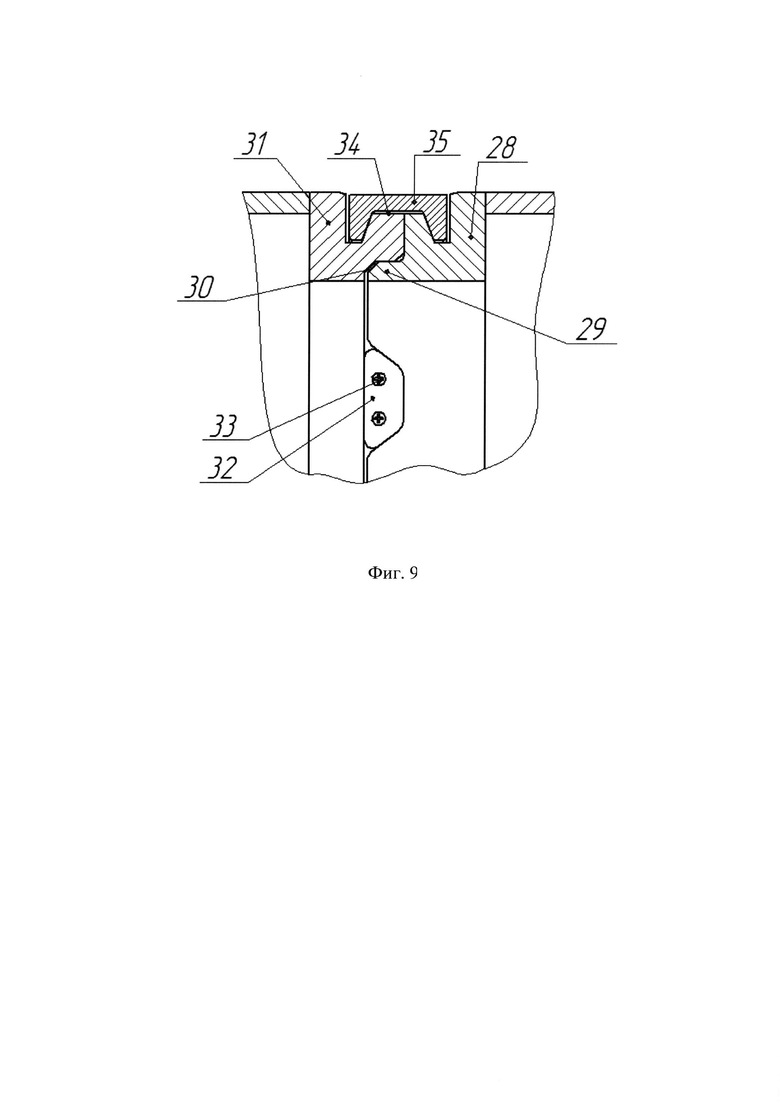
Соединение модулей 15 и 16 осуществляется с помощью быстроразъемного устройства 27 (фиг. 7), включающего полукольца 35 (фиг. 9, 10) по аналогии с устройством, описанным в патенте JP 200016386 А от 06.07.1998 г., но без использования уплотнения, т.к. соединяемые несущие конструкции являются водопроницаемыми. Отсутствие уплотнения позволяет производить стыковку без применения специализированного технологического оборудования.
Фланец 28 (фиг. 9) своей посадочной поверхностью выступа 29 входит в паз 30 фланца 31, таким образом обеспечивается поперечная прочность и жесткость корпусной конструкции аппарата. Для однозначной ориентации и исключения углового смещения модулей относительно друг друга в пазе 30 фланца 31 по окружности закреплен как минимум один клиновой штифт 32 при помощи как минимум двух винтов 33, а на выступе 29 фланца 28 имеется ответный вырез под зуб штифта. Конструкция штифта 32 в отличие от конструкции в патенте JP 200016386 А от 06.07.1998 г. позволяет воспринимать большие нагрузки и лучше работает на срез, тем самым обеспечивая дополнительную надежность соединения.
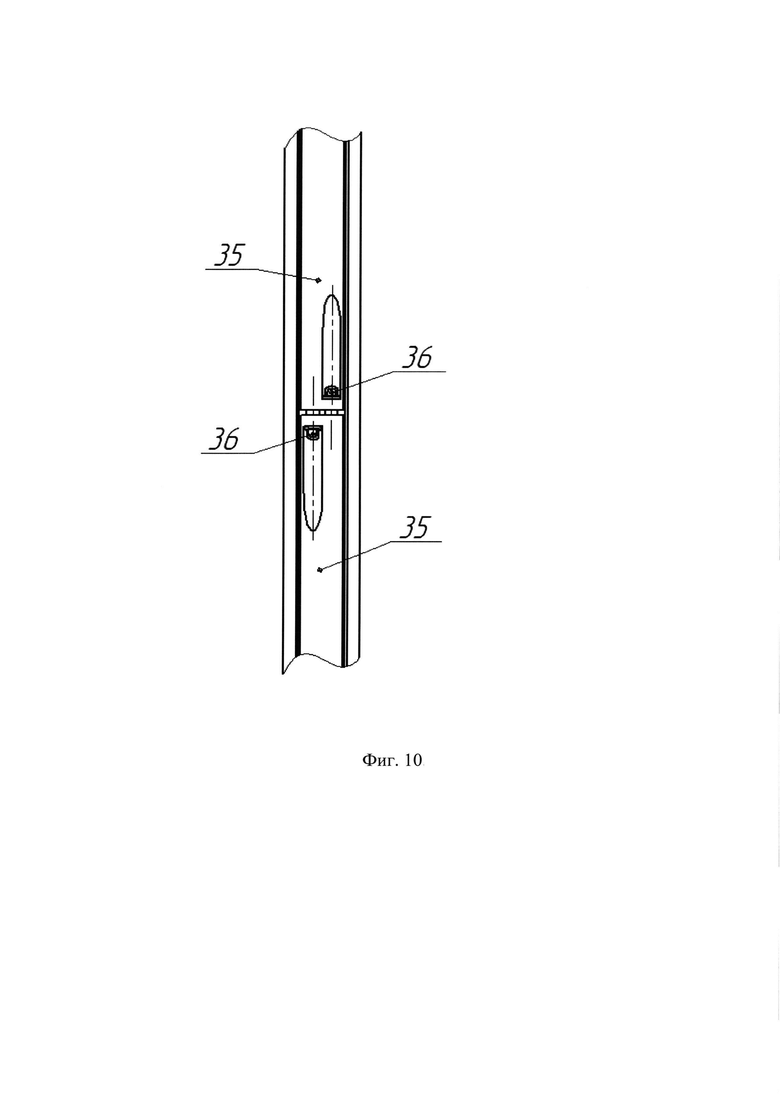
Кроме того, наличие клиновых поверхностей на зубе штифта и на ответном вырезе облегчает процесс сведения модулей. Фланцы 28 и 31 в сборе образуют единую клиновую поверхность 34, которая охватывается двумя полукольцами 35. При этом в отличие от патента JP 200016386 А от 06.07.1998 г. полукольца 35 (фиг. 10) не имеют шарнирной связи друг с другом и с обоих бортов соединяются при помощи четырех потайных винтов 36 (по два винта на каждый борт), т.е. уменьшается номенклатура деталей сборки.
Эллипсоидные вырезы в полукольцах 35 под потайные винты для обеспечения обтекаемости формы корпусной конструкции заполняются герметиком. Данное техническое решение обеспечивает собираемость, минимизирует время, трудозатраты на выполнение, сборки/разборки конструкции, обеспечивает быстроразъемность модулей и сохранение наружных теоретических обводов корпусной конструкции.
Таким образом, в базовую платформу АНПА интегрировано два способа соединения модулей корпусной конструкции:
- потайное болтовое с торцевым уплотнением - для соединения водонепроницаемых прочных корпусов модулей;
- потайное клиновое за счет обжатия фланцев двумя полукольцами -для соединения водопроницаемых легких корпусов модулей.
Кроме базовой платформы в комплекс глубоководного АНПА большого водоизмещения входит набор модулей полезной нагрузки. Набор модулей полезной нагрузки включает в себя как минимум два модуля, предназначенные для выполнения определенной миссии (океанографическое исследование, сейсморазведка, обследование подводной обстановки, выполнение специализированных задач и т.п.).
Каждый модуль полезной нагрузки включает в себя водопроницаемую несущую корпусную конструкцию, необходимый и достаточный комплект изделий, предназначенных для выполнения соответствующей функции в рамках закладываемой миссии, и набор электроэнергетических связей между изделиями. Изделия размещаются в прочных корпусах, укрепляемых на несущей конструкции модуля.
Каждый модуль полезной нагрузки является архитектурно законченным изделием и имеет возможность интеграции в корпусную конструкцию и электроэнергетическую сеть базовой платформы. Соединение корпуса модуля полезной нагрузки с модулями базовой платформы осуществляется за счет использования потайного клинового соединения (фиг. 9, 10).
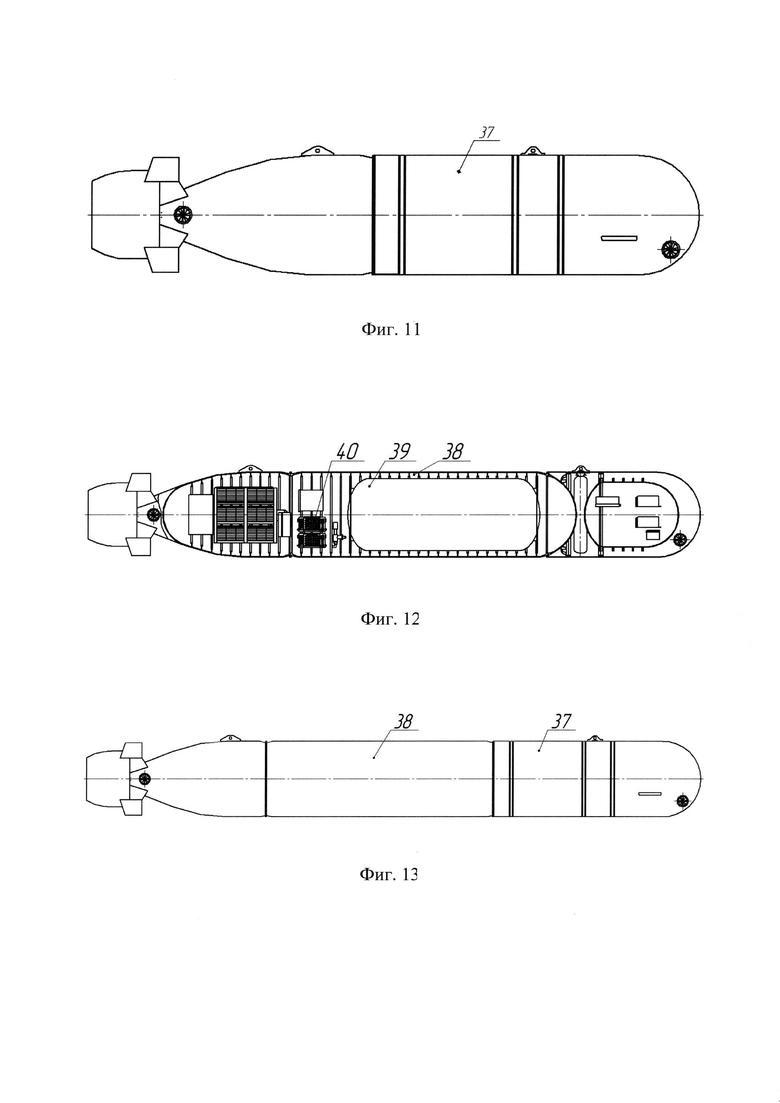
На фиг. 11 показана базовая платформа с интегрированным модулем полезной нагрузки 37 (одним из набора модулей полезной нагрузки).
Кроме того, в комплекс глубоководного АНПА большого водоизмещения входит дополнительный энергетический модуль 38 (фиг. 12), предназначенный для обеспечения сверхбольшой автономности АНПА, выполненный в виде однокорпусной водонепроницаемой прочной конструкции и включающий в себя цистерны с запасом реагентов 39, анаэробный генератор электроэнергии 40 и системы обеспечения.
Интеграция дополнительного энергетического модуля осуществляется в прочный корпус энергетического модуля базовой платформы при помощи потайного болтового соединения с как минимум одним торцевым уплотнением (фиг. 8).
На фиг. 13 показана базовая платформа с установленным дополнительным энергетическим модулем 38 и модулем полезной нагрузки 37.
Таким образом, за счет применения комбинированного способа соединения модулей обеспечивается возможность создания глубоководного АНПА большого водоизмещения сверхбольшой автономности с модульным исполнением корпусной конструкции.
Изобретение относится к подводному судостроению, а именно к применению модульного принципа проектирования несущей корпусной конструкции, к компоновке автономных необитаемых подводных аппаратов (АНПА). Разработан глубоководный АНПА с комбинированным способом соединения модулей корпусной конструкции, состоящей из водонепроницаемых и водопроницаемых корпусных конструкций. Соединение водонепроницаемых корпусных конструкций модулей осуществляется за счет потайного болтового соединения с как минимум одним торцевым уплотнением, а соединение водопроницаемых корпусных конструкций модулей осуществляется при помощи быстроразъемного потайного клинового соединения за счет обжатия соединительных фланцев двумя полукольцами. Достигается надежность и герметичность данного устройства. 4 з.п. ф-лы, 13 ил.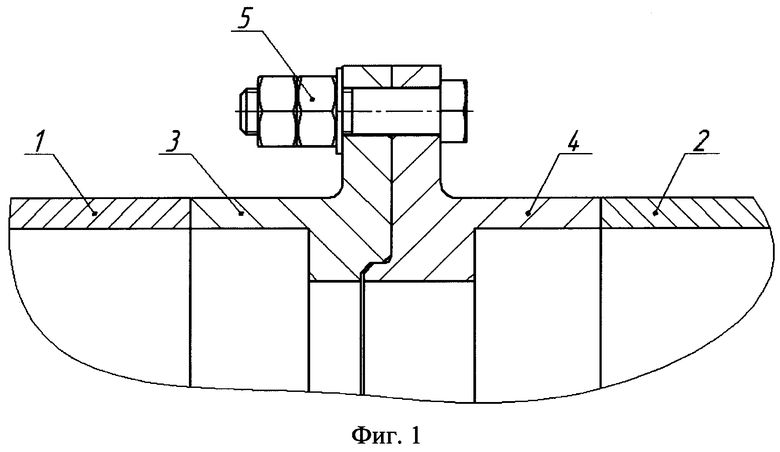
1. Глубоководный автономный необитаемый подводный аппарат (АНПА) с комбинированным способом соединения модулей корпусной конструкции, отличающийся тем, что корпусная конструкция АНПА состоит из водонепроницаемых и водопроницаемых корпусных конструкций, при этом соединение водонепроницаемых корпусных конструкций модулей осуществляется за счет потайного болтового соединения с как минимум одним торцевым уплотнением, а соединение водопроницаемых корпусных конструкций модулей осуществляется при помощи быстроразъемного потайного клинового соединения за счет обжатия соединительных фланцев двумя полукольцами.
2. Глубоководный АНПА по п. 1, отличающийся тем, что потайное болтовое соединение водонепроницаемых корпусов с как минимум одним торцевым уплотнением обеспечивает герметичность аппарата, при этом обеспечивается сохранение наружных теоретических обводов корпуса.
3. Глубоководный АНПА по п. 1, отличающийся тем, что состоит из базовой платформы, набора модулей полезной нагрузки и дополнительного энергетического модуля.
4. Глубоководный АНПА по п. 1, отличающийся тем, что базовая платформа состоит из двух основных штатных модулей и представляет собой АНПА, снабженный необходимым набором судовых систем, устройств, оборудования, автоматики, радио- и гидроакустических средств, а также источником энергии, при этом глубоководный АНПА имеет возможность определения и обхода препятствий.
5. Глубоководный АНПА по п. 1, отличающийся тем, что имеет возможность интеграции дополнительного энергетического модуля, включающего анаэробный генератор электроэнергии, запас реагентов и системы обеспечения.
| US 8539898 B1, 24.09.2013 | |||
| US 7290496 B2, 06.11.2007 | |||
| Устройство для оценки профессиональной пригодности операторов автоматизированных систем управления | 1986 |
|
SU1310877A2 |
| ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНЫЙ МОДУЛЬ КОЛЬЦЕВОЙ КОНСТРУКЦИИ | 2017 |
|
RU2670341C1 |

