Предлагаемое изобретение относится к силовым системам управления летательных аппаратов и наиболее целесообразно может быть использовано в рулевых приводах и автопилотах малогабаритных управляемых снарядов и ракет.
В системах управления современных летательных аппаратов широко применяются пневматические силовые следящие приводы, задачей которых является перемещение органов управления летательного аппарата по заданному закону с заданной точностью [1, стр.3-14, 33-36]. В качестве рабочего тела используется сжатый газ, потенциальная и кинетическая энергия которого преобразуется в механическую работу пневматическими двигателями, имеющими различное принципиальное и конструктивное устройство, В рулевых приводах летательных аппаратов в настоящее время наибольшее распространение имеют двигатели объемного типа с раздельными цилиндрами, принцип действия которых основан на попеременном наполнении и опорожнении рабочих полостей сжатым газом. Примером такого двигателя является широкораспространенный силовой цилиндр.
Известны различные схемы пневматических двигателей объемного типа, например, схема пневматического поршневого двигателя со встроенным потенциометром обратной связи с подвижным [1, рис.1,5а] и неподвижным [1. рис.1.5б] креплением силового цилиндра, отличающиеся соединением двигателя с нагрузкой. В первом случае шток поршня непосредственно соединен с рычагом рулей летательного аппарата, при этом пневматический двигатель будет качаться относительно хвостовой точки крепления при отклонении выходного вала, что приведет к увеличению приведенного к оси вращения рулей момента инерции подвижных частей и существенному усложнению исполнения узла соединения пневматического двигателя и пневматического распределительного устройства. Необходимо выполнять подводные каналы к пневматическому двигателю или к пневматическому распределительному устройству (при креплении устройства на корпусе двигателя) гибкими, что достаточно сложно при работе с горячими газами. Во втором случае схема не имеет этого недостатка, но в ней между рычагом нагрузки и штоком двигателя имеется еще одно шарнирное соединение, которое необходимо выполнять с минимальным люфтом.
Известна схема пневматического двигателя [1, рис.1.6], принятая за аналог. Пневматический двигатель состоит из двух отдельных цилиндров, возвратное движение которых осуществляется через нагрузку привода (через объект управления). С точки зрения компоновки привода в отсеке летательного аппарата эта схема [1, рис.1.6] оказывается предпочтительней схем [1, рис.1.5а, б] , так как она позволяет в два раза уменьшить длину отсека (до 3 Уmax, где Уmax - максимальный ход поршня) при соответствующем увеличении поперечного размера отсека [1, отр.34, 1-й абзац снизу, стр.35, 1-й абзац сверху].
Перед разработчиком малогабаритных управляемых снарядов и ракет стоит задача создания простых и удобных в эксплуатации снарядов и ракет с учетом ограничения массы, габаритов, трудоемкости и стоимости изготовления.
Для решения поставленной задачи в управляемых снарядах и ракетах широко используются воздушно-динамические рулевые приводы, использующие в качестве рабочего тела сжатый воздух от набегающего потока воздуха при полете снаряда, ракеты, так как они отличаются высокой надежностью при малом энергопотреблении, отсутствием специального источника рабочего тела и обеспечением стабильности динамических характеристик рулевого привода на частотах вращения снаряда, ракеты.
Известен (прототип) воздушно-динамический блок рулевого привода управляемого снаряда 9MII7, предназначенный для преобразования управляющих электрических сигналов в механические перемещения рулей. В качестве рабочего тела для работы привода используется сжатый воздух от набегающего воздушного потока при полете снаряда (М=0,6-1,2) с помощью воздухозаборного отверстия, расположенного в носовой части снаряда.
Рулевой привод двухканальный, содержит рули, складываемые во внутрь в сторону носовой части снаряда, и рулевые машины, каждая из которых состоит из управляющего электромагнита, распределительного устройства и силового цилиндра [2, рис.13].
Цилиндры размещены в носовой части снаряда относительно поперечной плоскости, проходящей через оси вращения рулей (как и сложенные рули), под углом 45o относительно продольной плоскости, проходящей через оси вращения рулей, что не позволяет реализовать как максимальный диаметр цилиндра, так и максимальное плечо передачи усилия.
Недостатком известного воздушно-динамического блока рулевого привода с раздельными цилиндрами является малая величина максимального развиваемого момента привода и, как следствие этого, низкое быстродействие и точность при отработке приводом заданных сигналов управления.
Задачей предлагаемого изобретения является повышение развиваемой мощности двухканального воздушно-динамического блока рулевого привода управляемого снаряда за счет увеличения максимального развиваемого момента привода, повышение быстродействия и точности работы привода при отработке заданных сигналов управления.
Поставленная задача решается за счет того, что в двухканальном воздушно-динамическом блоке рулевого привода управляемого снаряда (БРП), содержащем cкладываемые во внутрь рули, объединенные осями, снабженными рычагами, и пневматические поршневые двигатели объемного типа с раздельными цилиндрами, цилиндры выполнены с диаметром, определяемым из соотношения dц=0,4D, где D - диаметр внутренней поверхности БРП, расположены на стороне, противоположной от складывания рулей относительно поперечной плоскости под углом ϕ относительно продольной плоскости, проходящих через оси вращения рулей, и на окружности с диаметром d относительно продольной оси БРП, определяемыми из соотношений
d=0,6D,
где d0 - диаметр оси руля;
h - ширина рычага оси руля в месте соединения с цилиндром;
K - коэффициент, учитывающий зазор между осью руля одного канала и ручагом оси руля другого канала.
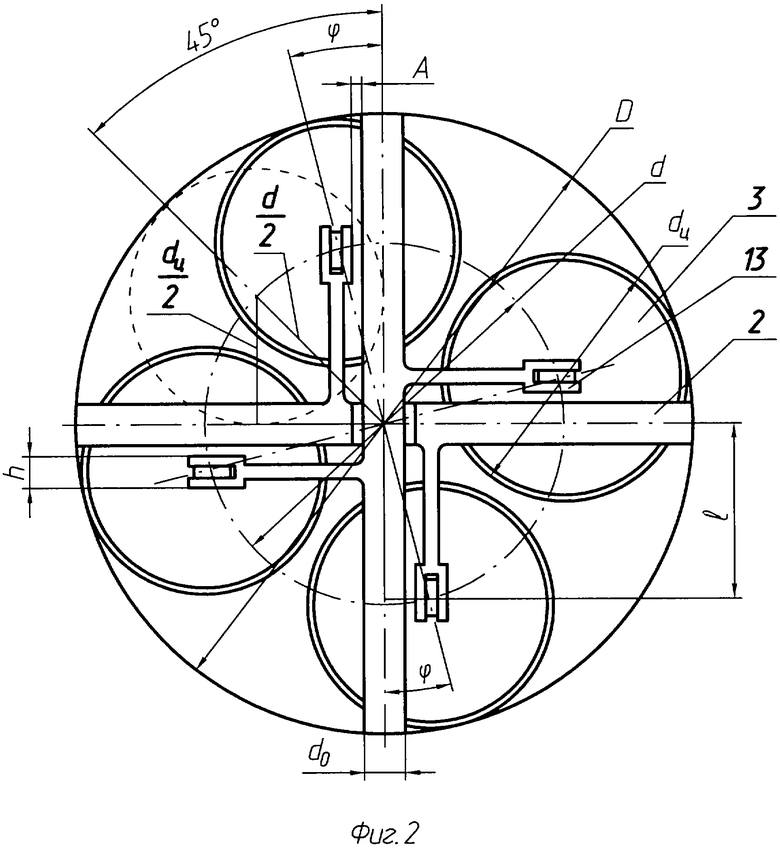
На фиг.1 приведена принципиальная схема предлагаемого двухканального воздушно-динамического блока рулевого привода управляемого снаряда, на фиг.2 - принципиальная схема размещения его цилиндров.
Каждый канал рулевого привода состоит из пары рулей 1, объединенных между собой осью 2, и пневматического поршневого двигателя объемного типа, включающего в себя раздельные цилиндры 3 и пневматическое распределительное устройство (ПРУ) струйного типа с регулированием на входе и выходе, включающее в себя электромагнит 4 и струйник 5, соединенные между собой осью 6, а также приемник 7 с двумя отверстиями 8, перегороженных перемычкой 9.
Из фиг. 2 видно, что максимальный диаметр dц и диаметр d положения продольных осей цилиндров относительно продольной оси блока рулевого привода связаны с диаметром D внутренней поверхности блока рулевого привода соотношениями
dц=D-d; (1)
или dц = d sin45°;
откуда 
Подставляя выражение (2) в выражение (1), получаем
Учитывая зазоры между цилиндрами, принимаем dц=0,4 D, тогда d=D-dц=0,6 D.
Так как цилиндры в предложенной конструкции блока рулевого привода размещены на противоположной стороне от складывания рулей относительно поперечной плоскости, проходящей через оси вращения рулей, плечо передачи усилия l можно увеличить за счет размещения цилиндров под углом ϕ относительно продольной плоскости, проходящей через оси вращения рулей на окружности с диаметром d относительно продольной оси БРП, которые определяются в соответствии с зависимостями:
где d0 - диаметр оси руля одного канала в зоне движения рычага оси другого канала;
h - ширина рычага оси руля в месте соединения с цилиндром.
Учитывая зазор А между осью руля одного канала и рычагом оси другого канала в зоне движения, можно записать
где К - коэффициент, учитывающий зазор между осью руля одного канала и рычагом оси другого канала в зоне движения, который из конструктивных и технологических соображений принимаем равным от 1,1 до 1,2.
Блок рулевого привода работает следующим образом. Сжатый воздух от набегающего потока при полете ракеты из области высокого давления поступает в силовые цилиндры 3 через струйник 5 и отверстия 8 приемника 7 и 10 цилиндров 3. При отсутствии управляющего сигнала (Uу=0) струйник находится в среднем положении. Разница давлений в полостях 11 цилиндров 3 равна 0 и рули 1 находятся в нулевом положении. При подаче управляющего сигнала Uу в одну из обмоток управления электромагнита 4 струйник 5 через ось 6 перемещается в одно из крайних положений. Сжатый воздух из струйника поступает в полость 11 одного из цилиндров через отверстия 8 приемника 7 и 10 силового цилиндра. Из полости 11 другого силового цилиндра, при этом, воздух сбрасывается в полость низкого давления и за счет разницы давлений в полостях 11 силовых цилиндров происходит перемещение поршня 12 на ход Хп и через штоки 13 и ось 2 поворот руля 1 на угол δp.
Предлагаемый двухканальный воздушно-динамический блок рулевого привода управляемого снаряда позволяет значительно увеличить максимальный развиваемый момент в заданном калибре за счет выполнения цилиндров максимального диаметра с максимальным плечом передачи усилия, повысить быстродействие и точность работы привода при отработке заданных сигналов управления.
Проведенные проверки опытных образцов предлагаемого двухканального воздушно-динамического блока рулевого привода малогабаритного управляемого снаряда подтвердили с положительными результатами эффективность заложенных технических решений во всех условиях при воздействии механических и климатических факторов применительно к условиям эксплуатации управляемых снарядов со скоростями полета в диапазоне М=0,52-2,3.
Таким образом, предлагаемое техническое решение позволяет повысить мощность воздушно-динамического блока рулевого привода и может быть использовано как для модернизации существующих, так и для разработки вновь создаваемых малогабаритных управляемых снарядов комплексов высокоточного управляемого вооружения.
Источники информации
1. Пневмопривод систем управления летательных аппаратов. Под общей редакцией В.А. Чащина. М.: Машиностроение, 1987.
2. Блок рулевого привода. Выстрел ЗУБК10-1 с управляемым снарядом 9M117. Техническое описание и инструкция по эксплуатации ЗУБК10-1.00.00.000 ТО. М., Военное издательство, 1987, рис.6, 7, 11, 13, 16, стр.18, стр.20-28.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2234670C2 |
| Управляемый снаряд, блок рулевого привода управляемого снаряда, пневмораспределительное устройство рулевого привода управляемого снаряда, механизм инициирования рулевого привода управляемого снаряда | 2017 |
|
RU2669979C1 |
| СПОСОБ ПРОВЕРКИ ПРИВЕДЕНИЯ В РАБОЧЕЕ СОСТОЯНИЕ ГЕРМЕТИЧНОГО АВТОПИЛОТНОГО БЛОКА | 1997 |
|
RU2126949C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2172927C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2237857C2 |
| БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2003 |
|
RU2248519C1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2206058C1 |
| СПОСОБ ПРОВЕРКИ ФУНКЦИОНИРОВАНИЯ ВОЗДУШНО-ДИНАМИЧЕСКОГО РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМЫХ СНАРЯДОВ ИЛИ РАКЕТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2218548C2 |
| Отсек рулевого привода управляемой ракеты | 2020 |
|
RU2743420C1 |
| СПОСОБ ПРОВЕРКИ РАЗВИВАЕМОГО МОМЕНТА ЭЛЕКТРОПНЕВМАТИЧЕСКОГО РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМЫХ РАКЕТ И СНАРЯДОВ | 2003 |
|
RU2249173C1 |
Изобретение относится к силовым системам управления летательных аппаратов и может быть использовано в рулевых приводах и автопилотах малогабаритных управляемых снарядов и ракет. Блок рулевого привода (БРП) содержит рули, объединенные осями, снабженными рычагами, и пневматические поршневые двигатели объемного типа с раздельными цилиндрами. Цилиндры выполнены диаметром, определяемым из соотношения dц=0,4D, где D - диаметр внутренней поверхности БРП. Цилиндры расположены на стороне, противоположной от складывания рулей относительно поперечной плоскости под углом ϕ относительно продольной плоскости, проходящих через оси вращения рулей, и на окружности с диаметром d относительно продольной оси БРП, определяемыми из соотношений d=0,6 D; ϕ = arcsinK(d0+h)/0,6D, где d0 - диаметр оси руля; h - ширина рычага оси руля в месте соединения с цилиндром; К - коэффициент, учитывающий зазор между осью руля одного канала и рычагом оси руля другого канала. Такое выполнение БРП позволяет повысить его мощность. 2 ил.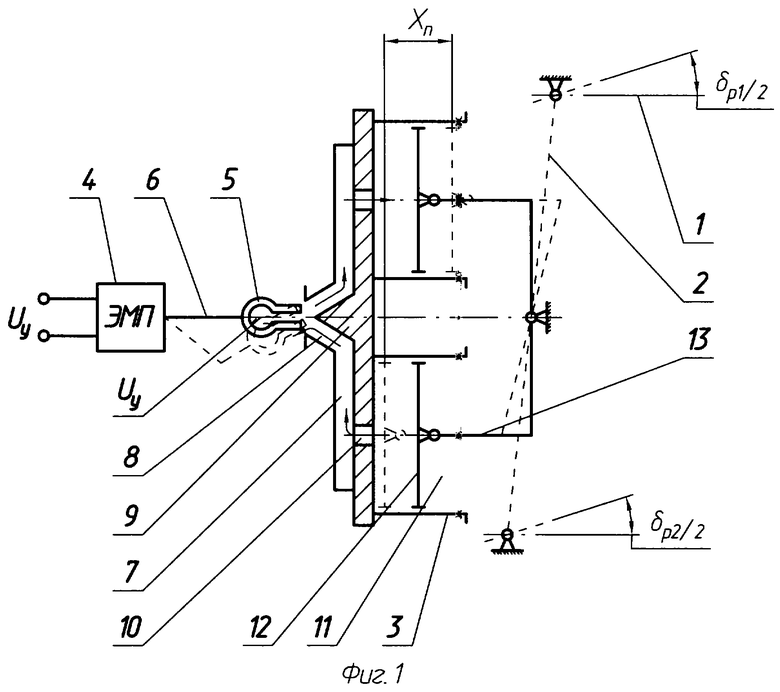
Двухканальный воздушно-динамический блок рулевого привода (БРП) управляемого снаряда, содержащий складываемые во внутрь рули, объединенные осями, снабженными рычагами, и пневматические поршневые двигатели объемного типа с раздельными цилиндрами, отличающийся тем, что цилиндры выполнены диаметром, определяемым из соотношения
dц=0,4D,
где D - диаметр внутренней поверхности БРП,
расположены на стороне, противоположной от складывания рулей относительно поперечной плоскости под углом ϕ относительно продольной плоскости, проходящих через оси вращения рулей, и на окружности с диаметром d относительно продольной оси БРП, определяемыми из соотношений
где d0 - диаметр оси руля;
h - ширина рычага оси руля в месте соединения с цилиндром;
К - коэффициент, учитывающий зазор между осью руля одного канала и рычагом оси руля другого канала.
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| - М.: Военное издательство, 1987, рис | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2000 |
|
RU2172927C1 |
| ДВУХКАНАЛЬНЫЙ ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2121648C1 |
| СПОСОБ КРЕПЛЕНИЯ ЛИСТОВ ФАЛЬЦЕВОЙ КРОВЛИ | 2005 |
|
RU2284397C1 |
| DE 4438010, 02.05.1996. | |||
