Изобретение относится к силовым системам управления летательных аппаратов и наиболее целесообразно может быть использовано в рулевых приводах и автопилотах малогабаритных управляемых ракет и снарядов.
Известен (аналог) пневматический рулевой привод с поршневым газовым (пневматическим) двигателем [1, рис. 2.5], в котором используется потенциальная энергия сжатого газа [1, стр. 123, 1-й абзац снизу]. Пневматический привод [1, стр. 132, рис. 2.5, 1-й абзац снизу] содержит сумматор, усилитель мощности, рулевую машину в составе электромеханического преобразователя, газового распределительного устройства, поршневого пневмодвигателя двухстороннего действия, кинематически связанного с рулями потенциометра обратной связи и источника газовой энергии. Отмечено [I, стр. 124, I-й абзац сверху], что наличие поршня с подвижными уплотнениями в поршневых газовых двигателях позволяет получить большие перемещения выходного звена-штока, связанного с рулями.
Недостатком привода [1], принятого за аналог с подвижными уплотнениями на поршне, является трудность обеспечения работы привода на низких и сверхнизких давлениях газа (PИ = 0,10-0,25 кг/см2) за счет существенного снижения развиваемого момента привода из-за потерь на сопротивление в уплотнениях перемещению поршня. Это обстоятельство ограничивает или делает практически невозможным применение такого привода при использовании энергии сжатого газа (энергия торможения) за счет скоростного напора, когда на малых скоростях полета снаряда пропорционально квадрату скорости соответственно уменьшается давление газа (PИ=0,5 ρV2).
Перед разработчиком малогабаритных управляемых ракет и снарядов стоит задача создания простых и удобных в эксплуатации ракет и снарядов с учетом ограничения массы, габаритов, трудоемкости и стоимости изготовления.
Для решения поставленной задачи в управляемых ракетах и снарядах широко используются воздушно-динамические рулевые приводы, использующие в качестве рабочего тела сжатый воздух от набегающего потока воздуха при полете ракеты, снаряда, так как они отличаются высокой надежностью при малом энергопотреблении, отсутствием специального источника рабочего тела и обеспечением стабильности динамических характеристик рулевого привода на частотах вращения ракеты, снаряда.
Опыт завершенных и проводимых разработок воздушно-динамических рулевых приводов для управляемых ракет и снарядов с широким диапазоном изменения скоростей полета от дозвуковых до гиперзвуковых (M=0,6-6,0) показал, что есть целый ряд специфических особенностей при расчете, конструкторской проработке и экспериментальной отработке приводов:
необходимость учета тепловых воздействий при выборе материалов конструкции, размеров зазоров в подвижных соединениях и расчете обобщенных и динамических характеристик;
разработка конструкции и подбор материалов уплотнений, обеспечивающих малые трения на минимальных давлениях и не допускающих перетекания газа из полости в полость при воздействии высоких температур и давлений;
разработка специального оборудования для испытаний рулевых приводов на воздействие высоких температур.
Для решения задач управления в ракетах и снарядах с дозвуковой, сверх- и гиперзвуковыми скоростями при действии лобового сопротивления ракеты, снаряда важным условием является обеспечение минимума расхода рабочего тела, что достигается установкой уплотнительных устройств и применением регулирования на входе и выходе. Но введение уплотнительных устройств приводит к возрастанию трения, а это усложняет работу привода на дозвуковых скоростях. Кроме того, определенные трудности возникают с обеспечением надежной работы уплотнений при M ≥ 2,5 из-за воздействия рабочего тела с высокой температурой
Tвх=Ta•(1+0,2•M2),
где Ta - температура окружающей среды в oK,
M - скорость полета ракеты M = V/a,
и давлением
PИ=25-40 кг/см2 (TВХ=1350-2000oC)
Известен (прототип) воздушно-динамический блок рулевого привода управляемого снаряда 9M117, предназначенный для преобразования управляющих электрических сигналов в механические перемещения рулей, состоящий из суммирующего устройства, корректирующего фильтра, триггерного устройства, усилителей мощности, рулевых машин и потенциометра обратной связи [2, рис. 11]. В качестве рабочего тела для работы привода используется сжатый воздух от набегающего воздушного потока при полете снаряда (M=0,6-1,2) с помощью воздухозаборного отверстия, расположенного в носовой части снаряда. Каждая из рулевых машин состоит из управляющего электромагнита, распределительного устройства и цилиндра [2, рис. 13]. Уплотнение в силовом цилиндре рулевой машины между поршнем и цилиндром [2, рис. 13, поз. 14,13; рис 16 поз. 6] обеспечивается с помощью гибкой тонкостенной резиновой манжеты, упрочненной снаружи чехлом из трикотажного полотна.
Недостатками известного воздушно-динамического блока рулевого привода с исполнительными элементами, имеющими уплотнительные устройства между поршнем и цилиндром рулевой машины в виде гибкой тонкостенной резиновой манжеты с чехлом, являются следующие:
1. Наличие значительного и нестабильного момента сопротивления перемещению поршня, величина которого может существенно увеличиваться при работе в диапазоне минусовых температур окружающей среды, что обусловлено физическими свойствами материалов манжеты и чехла, связанной с потерей их эластичности на минусовых температурах.
2. Невозможность работы привода при больших давлениях и температурах сжатого воздуха, соответствующих полету ракеты, снаряда на сверхзвуковых и гиперзвуковых скоростях без существенной доработки уплотнительных устройств.
3. Уменьшение полезной мощности рулевого привода за счет уменьшения эффективной площади поршня в тех же габаритах.
4. Усложнение конструкции и увеличение трудоемкости изготовления привода за счет дополнительных креплений манжеты, чехла, жесткого центра и штока с обеспечением герметичности соединений.
5. Применение дефицитных материалов, изготавливаемых из импортного сырья (каучук, полиэфирная текстурированная среднерастяжимая нить) и на специальном оборудовании (пресс-формы для резиновых манжет и вязальные автоматы 27 класса для изготовления трикотажного полотна).
В связи с отмеченными недостатками известных приводов [1,2], в рулевых машинах которых используются контактные уплотнения, представляет практический интерес для разработчика приводов возможность применения в воздушно-динамических рулевых приводах существующих и вновь разрабатываемых малогабаритных управляемых ракет и снарядов комплексов высокоточного управляемого вооружения бесконтактных уплотнений, которые принципиально могут обеспечить движение поршня рулевой машины с минимальным или близким к нулевому моментом сопротивления в уплотнениях, т.е. с обеспечением при этом минимальных потерь по давлению.
В справочнике [3], в котором изложены общие вопросы уплотнительной техники и приведены сведения о наиболее распространенных уплотнительных устройствах общемашиностроительного назначения, а также специальные уплотнения, предназначенные для эксплуатации в агрессивных, абразивных и двухфазных средах при режимах, характерных для агрегатов энергетических, химических и других отраслей техники, рассмотрены интересующие разработчика рулевых приводов бесконтактные уплотнения, а именно щелевые уплотнения с гладкими поверхностями, которые могут работать в жидкостях и газах, и целевые уплотнения с канавками, т.е. так называемые лабиринтные уплотнения, резко изменяющие проходное сечение канала [3, стр. 375-388].
Отмечено [3, стр. 376, 1-й абзац снизу во 2-й колонке и стр. 377 1-й абзац сверху в 1-й колонке], что "Лабиринтные уплотнения широко используются в центробежных и осевых компрессорах, турбодетандерах, паровых турбинах и других машинах".
Понятие "других машинах" нуждается в уточнении применительно к специфике работы пары поршень-силовой цилиндр в рулевых машинах воздушно-динамических рулевых приводов малогабаритных управляемых ракет и снарядов.
За счет многократного дросселирования рабочей среды, протекающей через камеры, и сужения с резко изменяющимися проходными сечениями в лабиринтных уплотнениях могут быть обеспечены приемлемые показатели перетекания с обеспечением при этом минимальных потерь на трение.
Приведенные в справочнике [3] различные типы лабиринтных уплотнений для газов [3, рис. 11.10, стр. 385-388, см. раздел "Лабиринтные уплотнения для газов"] и конструкции лабиринтных уплотнений [3, рис. 11.12, рис. 11-13] предназначены для уплотнения вращающихся валов различных машин и не могут быть применены для уплотнения пары поршень-цилиндр в рулевой машине, где основной вид движения поступательный, так как в этом случае эти типы лабиринтных уплотнений для газов вообще не будут работоспособны из-за быстрого смятия этих гребней.
Представляют практический интерес для применения в качестве уплотнения в пневматических рулевых приводах лабиринтные уплотнения с кольцевыми канавками прямоугольного сечения типа приведенных в справочнике [3, рис. 11.7, рис. 11.9 схема 2 с канавкой прямоугольного сечения], которые предназначены в качестве уплотнений для жидкостей, как это следует из описания [3, стр. 383-385 см. раздел "Лабиринтные уплотнения для жидкостей" и рис. 11.1 см. схему в) с кольцевыми канавками (для жидкостей)].
Этот интерес вызван тем обстоятельством, что эта схема лабиринтного уплотнения с кольцевыми канавками прямоугольного сечения для жидкостей может быть использована в качестве лабиринтного уплотнения для газов (воздуха), так как она принципиально может обеспечить работоспособность без смятия гребней при поступательном движении поршня внутри силового цилиндра рулевой машины.
Очевидно, что исходя из того, что физические основы течения жидкости и газа в лабиринтном уплотнении с кольцевыми канавками различны, разными будут и рациональные конструктивные параметры уплотнения, исходя из обеспечения минимальных потерь по давлению при работе воздушно-динамического рулевого привода на малых и высоких давлениях, так и надежности его работы без перекосов и заклинивания поршня при его движении внутри цилиндра.
Аналогов применения лабиринтных уплотнений в пневматических рулевых приводах малогабаритных управляемых ракет и снарядов не выявлено.
Задачей предлагаемого изобретения является повышение мощности привода, упрощение конструкции и повышение надежности его работы.
Поставленная задача решается за счет того, что в воздушно-динамическом блоке рулевого привода управляемого снаряда, содержащем рули и рулевые машины, кинематически связанные между собой, рулевые машины выполнены с лабиринтным уплотнением между поршнем и цилиндром в виде не менее двух канавок прямоугольного сечения на поршне, длину которого определяют из условия
l≥0,35d.
где l - длина поршня, мм,
d - диаметр поршня, мм,
число канавок выбирают из соотношения
где Z - число канавок, шт,
l - длина поршня, мм,
lк - ширина канавки, выбираемая равной 1,5-1,8 мм,
lп - ширина гребня, выбираемая равной (1,2-1,4)•lk, мм,
с обеспечением при этом допустимой величины зазора между поршнем и цилиндром, определяемой из зависимостей в диапазоне диаметров поршня от 10 до 150 мм
где hmin, hmax - минимальная и максимальная величина зазоров между поршнем и цилиндром, 10-3мм,
D - диаметр цилиндра, мм,
d - диаметр поршня, мм,
а глубину канавок выбирают из условия
hк≥5•hmax,
где hк - глубина канавки, мм,
hmax - максимальная величина зазора между цилиндром и поршнем, мм.
Поршень силового цилиндра выполнен полым с обеих сторон, а по центру поршня силового цилиндра со стороны штока выполнен цилиндрический выступ с резьбой снаружи и коническим отверстием внутри, а в штоке - сфера, объединенные между собой накидной гайкой с конусом на внутренней стороне буртика, с осевым люфтом
ΔX = (0,1-0,25)•Xп/δp,
где ΔX - осевой люфт, мм,
Xп - максимальный ход поршня, мм,
δp - максимальный угол поворота, град.
На фиг. 1 приведена принципиальная схема одного из каналов предлагаемого воздушно-динамического блока рулевого привода управляемого снаряда, каждый канал которого состоит из пары рулей 1, объединенных между собой осью 2, рулевой машины, включающей в себя два отдельных силовых цилиндра 3 (СЦ1 и СЦ2), пневматического распределительного устройства (ПРУ) с клапанным регулированием на выходе, включающим в себя два отдельных электромагнита 4 с обмотками управления 5 (ОУ1 и ОУ2), якорями 6 (Я1 и Я2) и магнитопроводами 7.
Рули 1 через ось 2 и штоки 8 связаны с поршнями 9 силовых цилиндров 3.
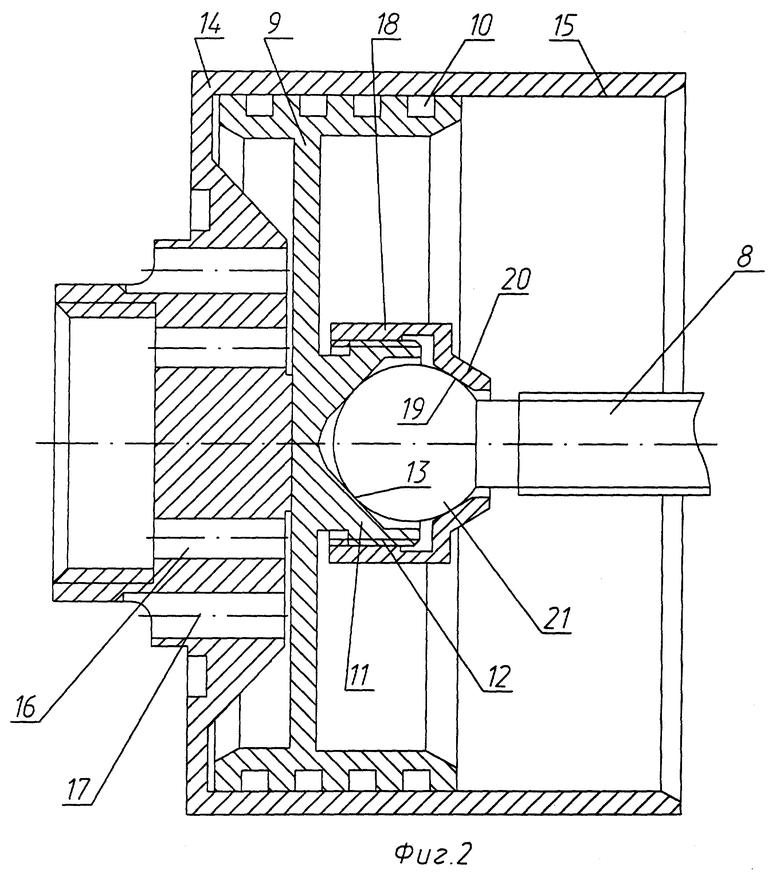
На фиг. 2 приведена конструкция предлагаемого силового цилиндра, содержащая поршень 9 с проточками 10 и цилиндрическим выступом 11, включающим в себя резьбу 12 и коническое отверстие 13. Основание 14 с цилиндром 15 и отверстиями входными 16 и выходными 17, гайку 18 с конусом 19 на буртике 20, а также шток 8 со сферой 21.
Блок рулевого привода работает следующим образом. Сжатый воздух PИ от набегающего потока при полете ракеты из области высокого давления поступает в силовые цилиндры 3 (СЦ1 и СЦ2) через входные отверстия 16. При отсутствии управляющего сигнала якоря 6 (Я1 и Я2) пружинами 22 отжаты от магнитопровода 7, образуя зазор 23, через который выходит воздух. Разница давлений в полостях 24 силовых цилиндров 3 равна 0 и рули 1 находятся в нулевом положении. При подаче управляющего сигнала в одну из обмоток управления 5 (ОУ1 и ОУ2) якорь 6 (Я1 или Я2) притягивается к магнитопроводу 7, закрывая выходной зазор 23, и за счет разницы давлений в полостях 24 силовых цилиндров 3 (СЦ1, СЦ2) происходит перемещение поршня 9 на вход XП и через штоки 8 и ось 2 поворот руля 1 на угол δp.
Для уменьшения момента инерции поршень выполнен полым с обеих сторон, с целью исключения заклинивания перемещения в нем выполнен цилиндрический выступ 11 с резьбой 12 и коническим отверстием 13, а в штоке 8 - сфера 21. Поршень 9 и шток 8 объединены гайкой 18 с конусом 19 на буртике 20 с осевым люфтом ΔX = (0,1-0,25)•Xп/δp. позволяющим свободное возвратно-поступательное перемещение поршня 9 при возвратно-поступательном и угловом перемещении штока 8, здесь Xп - максимальный ход поршня в мм,
δp - максимальный угол поворота руля в градусах,
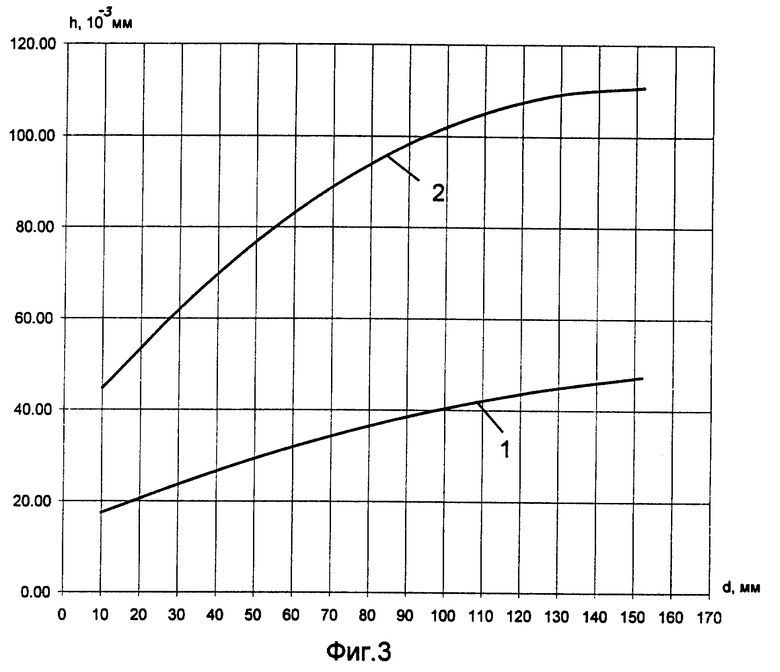
ΔX - - осевой люфт в мм. Минимальная и максимальная величины зазоров между поршнем 9 и цилиндром 15 основания 14 определяются из выражений:
где d - диаметр поршня 9 в мм,
D - диаметр цилиндра 15 основания 14 в мм.
Графики зависимости зазоров от величины диаметра поршня приведены на фиг. 3 (кривая I - зазор hmin, кривая 2 - зазор hmax).
С целью уменьшения перетекания воздуха из полости 24 в полость 25 силового цилиндра 3 поршень 9 выполнен с лабиринтным уплотнением. При движении воздушного потока через лабиринтные уплотнения происходит расширение воздуха. Этот процесс осуществляется путем многократного преобразования потенциальной энергии давления в кинетическую воздушного потока в узкой части щели (зазора между цилиндром и поршнем) с последующей почти полной диссипацией кинетической энергии в камерах лабиринта (проточек). Чем большая доля кинетической энергии в каждой камере переходит в теплоту, тем больше сопротивление движению воздуху создает уплотнение в направлении от входа к выходу.
Параметры лабиринтного уплотнения выбираются следующим образом. Проточки шириной lк=(1,5-1,8) мм, глубиной hк≥5•hmax в количестве  с шириной гребня
с шириной гребня
lп = (1,2-1,4)•lк,
где hmax - максимальная величина зазора между цилиндром и поршнем, 10-3 мм,
l - длина поршня, мм.
Здесь lк выбирается их технологических соображений (чем уже канавки, тем больше износ инструмента), lп - из условий износа гребней (чем уже, тем больше износ), l и d (диаметр поршня), а также hк и Z - из возможностей конструкции при заданных габаритах.
Предлагаемый воздушно-динамический блок рулевого привода с лабиритным уплотнением позволил существенно уменьшить и стабилизировать во всех условиях работы величину момента трения в уплотнительных устройствах рулевых машин, повысить мощность привода, упростить конструкцию привода за счет исключения сложной и трудоемкой в изготовлении сборки силового цилиндра с мягкими уплотнениями (резиновая манжета с чехлом) и повысить надежность работы привода за счет упрощения конструкции и исключения контактных уплотнительных устройств, обеспечить работу привода на низких и сверхнизких рабочих давлениях сжатого воздуха от набегающего потока при полете снаряда при допустимых минимальных потерях давления за счет перетекания в лабиринтных уплотнениях без ограничения работы при минусовых температурах окружающей среды.
Проведенные проверки опытных образцов предлагаемого воздушно-динамического блока с диаметром поршня d=42 мм рулевого привода малогабаритного управляемого снаряда подтвердили с положительными результатами эффективность заложенных технических решений во всех условиях при воздействии механических и климатических факторов применительно к условиям эксплуатации управляемых снарядов со скоростями полета в диапазоне M=0,6-0,9.
Таким образом, предлагаемое техническое решение позволяет повысить мощность воздушно-динамического блока рулевого привода, упростить его конструкцию и повысить надежность работы привода и может быть использовано как для модернизации существующих, так и для разработки вновь создаваемых малогабаритных управляемых снарядов комплексов управляемого вооружения.
Источники информации:
1. Пневматический рулевой привод. Кн. Костин С.В., Петров Б.Н., Гамыкин Н. С. Рулевые привода. М., Машиностроение, 1973, стр. 98-149, рис. 2.5, стр. 122-130.
2. Блок рулевого привода. Выстрел ЗУБК10-1 с управляемым снарядом 9М117. Техническое описание и инструкция по эксплуатации ЗУБК10-1.00.00.000 ТО. Т. М., Военное издательство, 1987, рис. 6,7,11,13,16 стр. 18, стр. 20-28.
3. Уплотнения и уплотнительная техника. Справочник. Под общей редакцией А.И.Голубева и Л.Ф. Кондакова. М., Машиностроение, 1986.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2206058C1 |
| РУЛЕВАЯ МАШИНА УПРАВЛЯЕМОГО СНАРЯДА | 2004 |
|
RU2282134C2 |
| ДВУХКАНАЛЬНЫЙ ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2224214C2 |
| РАЗОМКНУТЫЙ ПНЕВМОПРИВОД СИСТЕМЫ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СПОСОБ КОНТРОЛЯ ЕГО ДИНАМИКИ | 2000 |
|
RU2184340C2 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2237857C2 |
| СПОСОБ ПРОВЕРКИ РАЗВИВАЕМОГО МОМЕНТА ЭЛЕКТРОПНЕВМАТИЧЕСКОГО РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМЫХ РАКЕТ И СНАРЯДОВ | 2003 |
|
RU2249173C1 |
| УПРАВЛЯЕМЫЙ СНАРЯД И РУЛЕВАЯ МАШИНА ДЛЯ НЕГО | 2000 |
|
RU2184927C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2184926C2 |
| ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 2002 |
|
RU2234670C2 |
| РЕЛЕЙНЫЙ ПНЕВМОПРИВОД С ВИБРАЦИОННОЙ ЛИНЕАРИЗАЦИЕЙ СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТЫ | 2007 |
|
RU2337309C1 |
Изобретение относится к силовым системам управления реактивных снарядов. Воздушно-динамический блок рулевого привода управляемого снаряда содержит рули и рулевые машины, кинематически связанные между собой. Рулевые машины выполнены с лабиринтным уплотнением между поршнем и цилиндром в виде не менее двух канавок прямоугольного сечения на поршне. Поршень силового цилиндра выполнен полым с обеих сторон. По центру поршня со стороны штока выполнен цилиндрический выступ с резьбой снаружи и коническим отверстием внутри, а в штоке - сфера, объединенные между собой накидной гайкой с конусом на внутренней стороне буртика и осевым люфтом. Размеры поршня, число и размеры канавок, величина зазора между поршнем и цилиндром, а также величина осевого люфта определяются по зависимостям, приведенным в описании. Изобретение позволяет упростить конструкцию и повысить мощность и надежность работы рулевого привода. 1 з.п.ф-лы, 3 ил.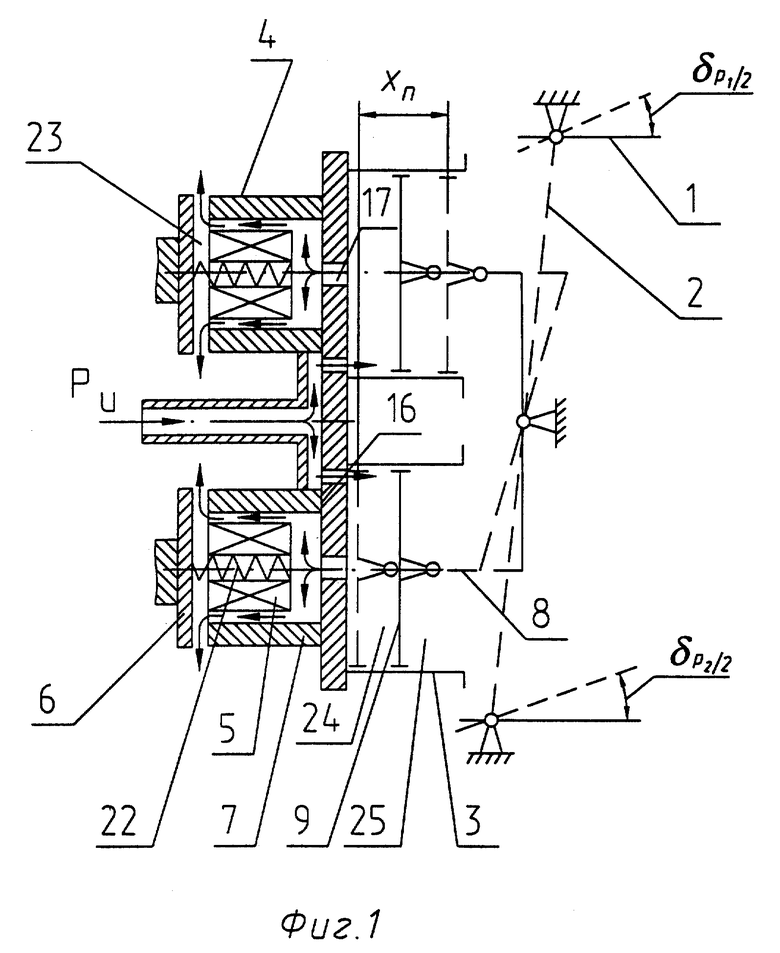
l≥0,35d,
где l - длина поршня, мм;
d - диаметр поршня, мм,
число канавок выбирают из соотношения
где Z - число канавок, шт.;
l - длина поршня, мм;
lк - ширина канавки, выбираемая равной 1,5 - 1,8 мм;
lп - ширина гребня, выбираемая равной (1,2 - 1,4)•lк, мм,
с обеспечением при этом допустимой величины зазора между поршнем и цилиндром, определяемой из зависимостей в диапазоне диаметров поршня от 10 до 150 мм
где hmin, hmax - минимальная и максимальная величины зазоров между поршнем и цилиндром, 10-3 мм;
D - диаметр цилиндра, мм;
d - диаметр поршня, мм,
а глубину канавок выбирают из условия
hк≥5•hmax,
где hк - глубина канавки, мм;
hmax - максимальная величина зазора между цилиндром и поршнем, мм.
ΔX = (0,1-0,25)Xп/δp,
где ΔX-осевой люфт, мм;
δp-максимальный угол поворота рулей, град.;
Хп - максимальный ход поршня, мм.
| Блок рулевого привода | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| - М.: Воениздат, 1987, с.18, 20 - 28, рис.6, 7, 11, 13, 16 | |||
| ДВУХКАНАЛЬНЫЙ ВОЗДУШНО-ДИНАМИЧЕСКИЙ БЛОК РУЛЕВОГО ПРИВОДА УПРАВЛЯЕМОГО СНАРЯДА | 1997 |
|
RU2121648C1 |
| US 5423497, 13.06.1995 | |||
| СПОСОБ КРЕПЛЕНИЯ ЛИСТОВ ФАЛЬЦЕВОЙ КРОВЛИ | 2005 |
|
RU2284397C1 |
| Способ структурной адаптации системы связи | 2019 |
|
RU2713329C1 |
| DE 4438010 A, 02.05.1996. | |||

