Известный уровень техники
Перекрестная ссылка на родственные заявки
Настоящая заявка испрашивает преимущество приоритета согласно ст. 35 Свода законов США § 119 (e) по предварительным заявкам США № 62141945, поданной 2 апреля 2015 г., № 62126726, поданной 02 марта 2015 г. и № 62218033, поданной 14 сентября 2015 г., полное содержание которых включено в настоящее описание посредством ссылки.
Область техники, к которой относится изобретение
Варианты осуществления раскрытого здесь изобретения в целом относятся к области сейсмических измерений. В частности, раскрытые здесь объекты относятся к устройствам, способам и системам сейсмической связи для геофизических измерений.
Обсуждение известного уровня техники
Сейсмические датчики развертывают на суше для получения геофизических данных. Для точной регистрации сейсмических данных датчикам необходимо плотно контактировать с грунтом. Плотный контакт сегодня достигается путем плотной "посадки" каждого датчика в землю человеком-оператором. Однако для проведения сейсмической съемки с высокой плотностью количество датчиков, которые необходимо развернуть, слишком велико, чтобы они могли быть эффективно установлены людьми. Вследствие этого, некоторые традиционные сейсморазведочные работы пропускают этот шаг, и человек-оператор просто "бросает" датчики на землю. В таком случае датчики часто страдают от ненадлежащей связи с грунтом, что приводит к плохому качеству данных.
В патенте США № 8998536, который включен в настоящее описание посредством ссылки, описывается решение, в котором машина выкапывает траншею, размещает в ней датчики и затем покрывает датчики грунтом. Хотя качество генерируемых геофизических данных может быть улучшено, использование такого решения усложняет процесс развертывания. Кроме того, такой способ требует, чтобы машина имела легкий доступ к месту, где необходимо развернуть датчики, что иногда невозможно. Более того, при таком способе развертывания датчики могут размещаться неточно или повреждаться во время развертывания.
Требуется решение для развертывания датчиков и обеспечения их связи, которое не усложняет процесс проведения сейсморазведочных работ.
Раскрытие изобретения
Как подробно описано в данном документе, сейсмическое сенсорное устройство для наземного или морского развертывания имеет нижнюю секцию, которая содержит текучую среду. При развертывании сенсорного устройства, когда оно сталкивается с грунтом, текучая среда высвобождается из нижней секции, чтобы улучшить контакт между грунтом и нижней секцией. Сейсмический датчик, расположенный в нижней секции, находится в контакте с текучей средой, тем самым обеспечивается хорошее связывание с грунтом.
Одним объектом изобретения является сенсорное устройство для регистрации сейсмических данных. Сенсорное устройство включает в себя верхнюю секцию и нижнюю секцию, съемно прикрепленную к верхней секции посредством соединительного разъема. Нижняя секция содержит связывающий материал, который высвобождается в грунт после столкновения нижней части с грунтом.
Другим объектом изобретения является система сейсморазведки для регистрации сейсмических данных. Система сейсморазведки включает в себя сенсорное устройство, которое измеряет сейсмические данные, и летательный аппарат, предназначенный для сброса сенсорного устройства с определенной высоты над целевой позицией. Сенсорное устройство имеет верхнюю секцию и нижнюю секцию, съемно крепящуюся к верхней секции посредством соединительного разъема. Нижняя секция содержит связывающий материал, который высвобождается в грунт после столкновения нижней части с грунтом.
Еще одним объектом изобретения является способ сбора сейсмических данных. Способ включает в себя этап развертывания летательного аппарата, несущего на себе сенсорное устройство, над целевой позицией на земле, этап сброса сенсорного устройства с определенной высоты над землей и этап высвобождения связывающего материала из сенсорного устройства при столкновении с грунтом. Связывающий материал обеспечивает улучшенное связывание находящегося внутри сенсорного устройства сейсмического датчика с грунтом.
Краткое описание чертежей
Прилагаемые чертежи, которые включены в состав и составляют часть спецификации, иллюстрируют один или несколько вариантов осуществления изобретения и вместе с описанием поясняют эти варианты. На чертежах показано:
на фиг. 1 - схематическое изображение системы наземной сейсмической разведки;
на фиг. 2 - схематическое изображение сейсмического сенсорного устройства в режиме свободного падения;
на фиг. 3 - схематическое изображение сейсмического сенсорного устройства;
на фиг. 4 - схематическое изображение нижней секции сейсмического сенсорного устройства;
на фиг. 5 - вход сейсмического сенсорного устройства в грунт при приземлении после свободного падения;
на фиг. 6 - воздействие сейсмического сенсорного устройства на грунт после свободного падения;
на фиг. 7 - другое сейсмическое сенсорное устройство;
на фиг. 8 -процесс возвращения сейсмического сенсорного устройства;
на фиг. 9 - блок-схема последовательности операций способа развертывания сейсмического сенсорного устройства;
на фиг. 10 и 11 - способ развертывания множества сенсорных устройств группой множеством летательных аппаратов;
на фиг. 12 и 13 - способ возвращения множества сенсорных устройств множеством летательных аппаратов;
на фиг. 14 - система развертывания/возвращения;
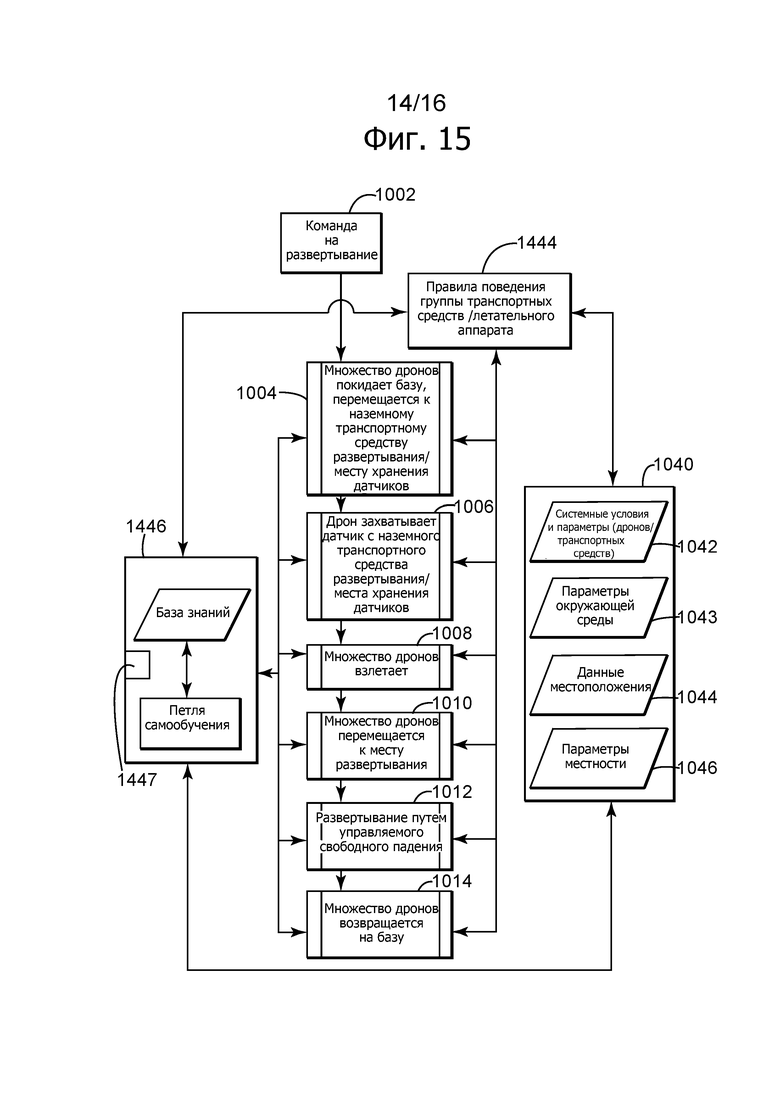
на фиг. 15 - способ развертывания сенсорных устройств с помощью системы с возможностью машинного обучения;
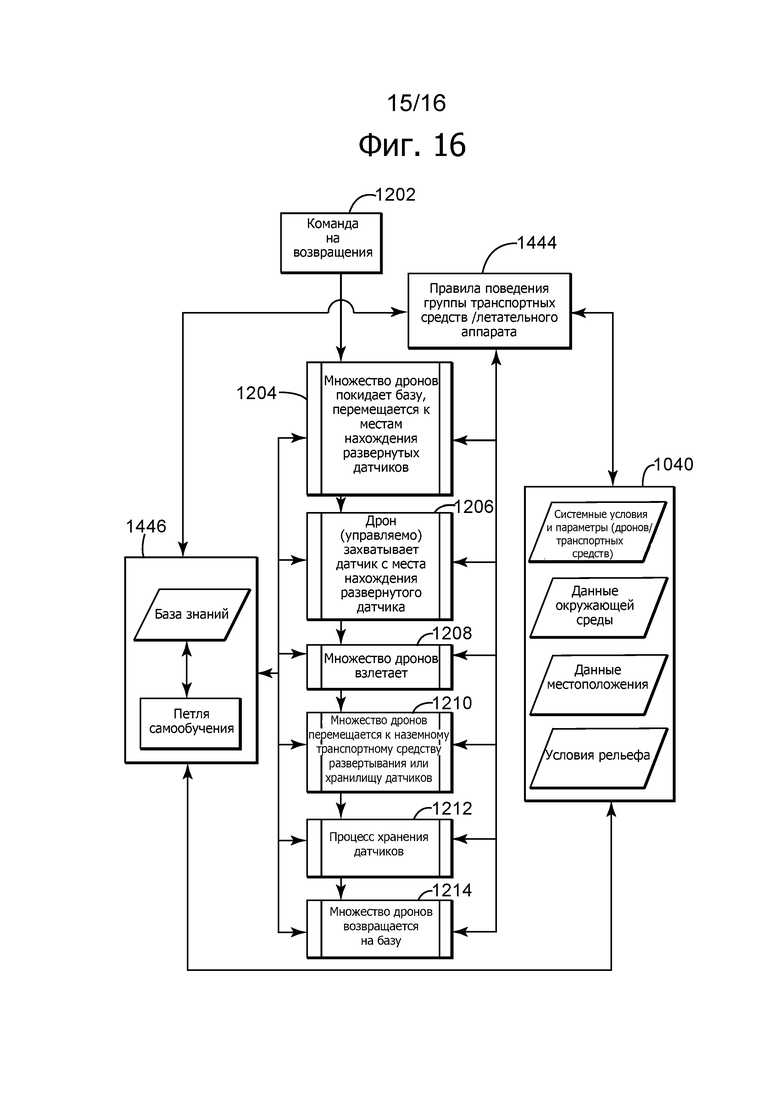
на фиг. 16 - способ возвращения сенсорных устройств с помощью системы с возможностью машинного обучения; и
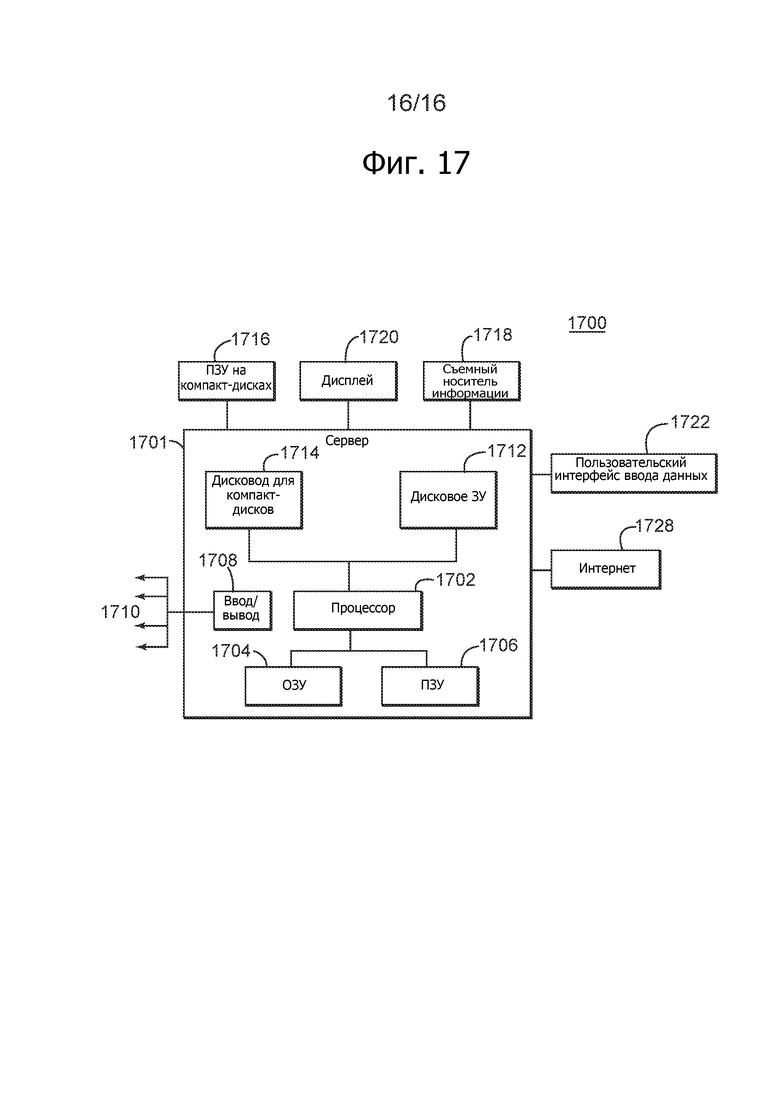
на фиг. 17 - блок-схема контроллера.
Подробное описание изобретения
Нижеследующее описание вариантов осуществления изобретения выполнено со ссылкой на прилагаемые к описанию чертежи. Одинаковые или похожие элементы на разных чертежах обозначены одинаковыми ссылочными позициями. Нижеследующее подробное описание не накладывает ограничений на изобретение. На самом деле объем изобретения определяется прилагаемой формулой изобретения. В нижеследующем описании варианты осуществления изобретения рассматриваются применительно к сейсмическим датчикам, развертываемым на суше. Однако приведенные варианты осуществления изобретения в равной степени применимы к датчикам, развертываемым на морском дне.
Ссылка по всему описанию на "один из вариантов осуществления" или на "вариант осуществления" означает, что конкретный признак, структура или характеристика, описанная в связи с вариантом осуществления изобретения, входит в состав по меньшей мере одного варианта раскрываемого объекта изобретения. Таким образом, появление фраз "в одном из вариантов осуществления" или "в варианте осуществления" в разных местах по всему описанию необязательно относится к одному и тому же варианту. Кроме того, конкретные признаки, структуры или характеристики могут объединяться любым подходящим способом в одном или нескольких вариантах осуществления изобретения.
Как подробно описано в настоящем документе, новое сейсмическое сенсорное устройство для геофизических измерений включает в себя нижнюю секцию и верхнюю секцию, которая съемно крепится к нижней секции. Нижняя секция содержит сейсмический датчик и текучую среду, которая высвобождается наружу, когда сейсмическое сенсорное устройство контактирует с грунтом. Верхняя секция включает в себя различные компоненты, в том числе запоминающее устройство для хранения сейсмической информации, регистрируемой сейсмическим датчиком. Запоминающее устройство может также использоваться только для временного хранения данных (в качестве буфера), чтобы способствовать беспроводной передаче данных. В другом варианте запоминающее устройство может не использоваться, и данные передаются по беспроводной связи по мере регистрации. В еще одном варианте осуществления запоминающее устройство может также использоваться для хранения не сейсмических данных, например такой информации, как команды выключения, перехода в режим низкого энергопотребления и т.д. По истечении заданного времени верхняя секция извлекается, а нижняя секция остается в грунте.
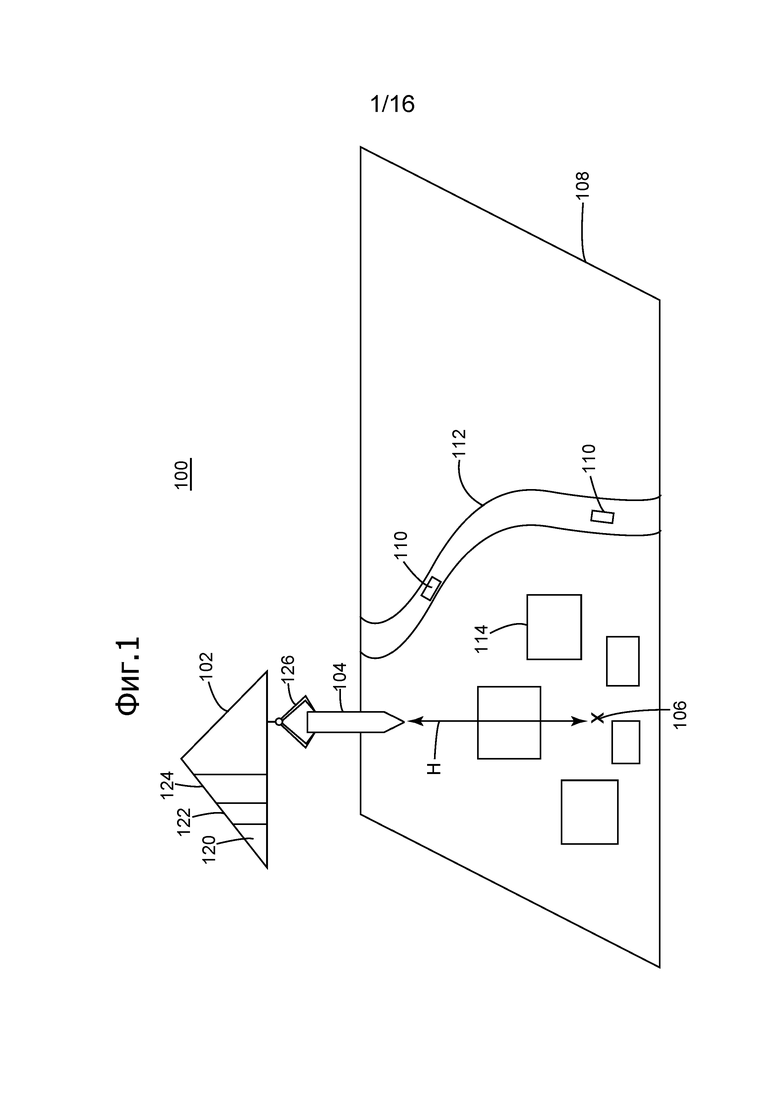
В варианте осуществления изобретения, показанном на фиг. 1, летательный аппарат 102 несет на себе по меньшей мере одно сейсмическое сенсорное устройство 104. Летательный аппарат 102 может управляться дистанционно, чтобы сбрасывать сенсорное устройство 104 в направлении целевой позиции 106. Целевая позиция 106 находится в зоне 108 сейсмической съемки. Многие другие целевые позиции (на чертеже не показаны) относятся к зоне 108 сейсмической съемки, и каждая из них принимает сенсорное устройство для регистрации сейсмических данных. Летательный аппарат 102 может представлять собой самолет, беспилотный летательный аппарат (дрон), воздушный шар, дирижабль и т.д., которые управляются дистанционно, например, из центра 110 управления. Центр 110 управления может располагаться на грузовом автомобиле, который следует по определенной дороге или пути 112. В одном из вариантов осуществления изобретения центр 110 управления находится в здании, удаленном от области 108 сейсмической съемки. В еще одном варианте летательный аппарат 102 представляет собой пилотируемый летательный аппарат, например вертолет. Летательный аппарат 102 может нести одно или несколько сенсорных устройств. Хотя в варианте, показанном на фиг. 1, летательный аппарат 102 несет только одно сенсорное устройство, он может нести десятки таких устройств. Летательный аппарат 102 может включать в себя винтомоторную систему 120 (например, двигатель и пропеллер), систему 122 обработки данных (например, процессор и память), систему 124 связи (например, приемник и передатчик) для связи с центром 110 управления и/или сенсорным устройством 104. В некоторых случаях связь с центром управления может также осуществляться через сеть, образованную дронами и/или датчиками (т.е. с использованием группы летательных аппаратов в качестве сети связи). Летательный аппарат 102 может также включать в себя другие компоненты, например, приемник глобальной спутниковой навигационной системы (GPS), источник питания и т.д.
В варианте, показанном на фиг. 1, целевая позиция 106 окружена валунами или другими препятствиями 114, что делает данную область недоступной для грузового автомобиля. Таким образом, традиционный подход использования грузового автомобиля для развертывания сенсорного устройства 104 может оказаться неосуществимым. По этой причине летательный аппарат 102 сбрасывает сенсорное устройство 104 с определенной высоты Н над целевой позицией 106, как это показано на фиг. 1. Летательный аппарат 102 может иметь держатель 126, который удерживает сенсорное устройство 104 и отпускает его по команде системы 122 обработки данных. В одном из приложений система обработки данных запрограммирована на выдачу команды освобождения сенсорного устройства центром управления через сеть связи. В другом приложении систему обработки программируют на освобождение сенсорного устройства перед началом сейсморазведки, или система обработки обучается освобождению сенсорного устройства на основе новых знаний, полученных в ходе машинного обучения. Могут использоваться другие известные специалистам в данной области техники механизмы удержания и освобождения сенсорного устройства 104.
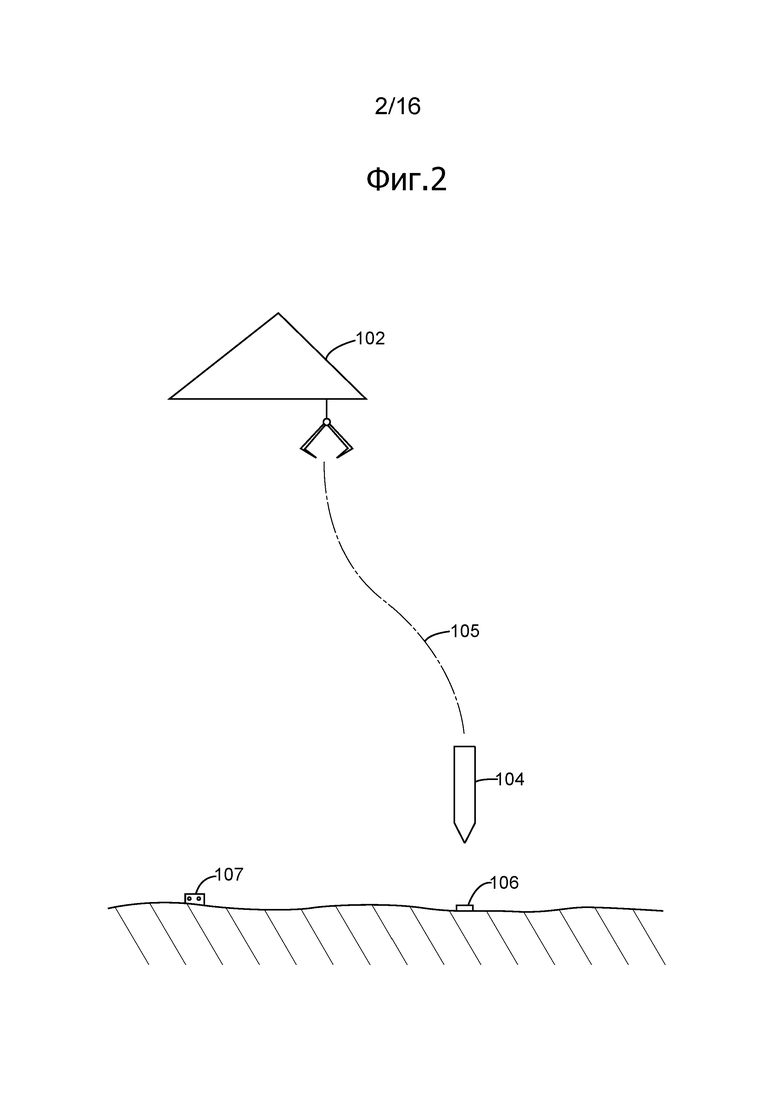
Сенсорное устройство 104 летит по воздуху в направлении целевой позиции, как это показано на фиг. 2. Сенсорное устройство падает под действием силы тяжести в направлении целевой позиции. В одном из вариантов сенсорное устройство не имеет какой-либо двигательной установки для коррекции траектории падения. Однако в другом варианте, рассматриваемом ниже, сенсорное устройство имеет двигательную установку для коррекции его траектории 105, показанной на фиг. 2. На фиг. 2 показано транспортное средство 107 поддержки, которое может помогать сенсорному устройству 104 приземляться в целевой позиции 106.
На фиг. 3 показана блок-схема сенсорного устройства 304. Сенсорное устройство 304 имеет верхнюю секцию 330 и нижнюю секцию 350. Верхняя секция или нижняя секция или обе секции имеют соответствующий соединительный разъем 380, который электрически соединяет две секции друг с другом. Соединительный разъем 380 обеспечивает обмен данными и/или электроэнергией между двумя секциями. Верхняя секция съемно крепится к нижней секции посредством соединительного разъема 380. Это означает, что путем простого вытягивания одной секции из другой, обе секции отделяются друг от друга. Верхняя секция 330 имеет корпус 332, в котором размещены рассматриваемые далее различные компоненты. Одним из таких компонентов является система 334 позиционирования, которая предназначена для определения местоположения сенсорного устройства. Такая система позиционирования может представлять собой приемник глобальной навигационной системы GPS. В одном из приложений система 334 позиционирования не определяет местоположение сенсорного устройства, а принимает данные о местоположении от летательного аппарата 102 или от расположенного на земле транспортного средства 107 поддержки. Транспортное средство 107 поддержки может использовать радиолокационную систему для определения местоположения сенсорного устройства.
Корпус 332 также содержит систему 336 связи для обеспечения связи с летательным аппаратом 102 и/или центром 110 управления и/или транспортным средством 107 поддержки. Система 336 связи может включать в себя приемник и передатчик для обмена данными в двух направлениях. Может использоваться любой известный способ связи. Система 336 связи может также включать в себя антенну для беспроводной связи. Система 336 связи может подключаться к системе 338 обработки данных, которая осуществляет обработку данных. Система 338 обработки данных может включать в себя процессор для осуществления различных операций обработки сейсмических данных и/или операций определения местоположения и/или связи. Система 338 обработки данных также может включать в себя блок хранения данных для хранения различных программ, сейсмических данных, команд и т.д.
Все эти системы должны снабжаться электроэнергией, чтобы функционировать. По этой причине внутри корпуса 332 имеется система 340 питания, которая может включать в себя генератор энергии, например, батарею, топливный элемент, солнечный элемент и т.д. В одном из приложений одна или несколько вышеупомянутых систем могут быть интегрированы в единый компонент. На Фиг. 3 показан кабель 342, соединяющий каждый компонент с другими компонентами для совместного использования электроэнергии и/или данных. Кабель 342 может продолжаться до соединительного разъема 380 для передачи электроэнергии в нижнюю секцию и для приема данных из нижней секции 350.
Как понятно специалистам в данной области техники, внутри верхней секции 330 могут располагаться другие компоненты. Например, если сенсорное устройство выполнено с возможностью управления своей траекторией, один или несколько механизмов 344 управления полетом (например, крылья, из которых для простоты на чертеже показано только одно крыло) крепятся к внешней стороне корпуса 332. Крыло 344 может крепиться неподвижно или управляться двигательной установкой 346. Двигательная установка 346 также может включать в себя один или несколько исполнительных механизмов (например, пропеллеров) 348 для изменения траектории полета сенсорного устройства.
Нижняя секция 350 имеет свой собственный корпус 352, в котором расположен сейсмический датчик 354, окруженный связывающим материалом 356. Внутри корпуса 352 расположен поршень 358, разделяющий его на первую и вторую камеры 360 и 362. Вторая камера 362 содержит связывающий материал 356, в то время как первая камера 360 содержит воздух. Поршень 358 может иметь кольцевое уплотнение 359, которое прижимается к внутренней стенке корпуса 352 для герметизации первой камеры от второй камеры. Однако в одном из вариантов уплотнение 359 может быть неплотным, чтобы позволять небольшому количеству связывающего материала перетекать из второй камеры в первую камеру, когда поршень 358 перемещается к концевой части 364.
Сейсмический датчик 354 электрически соединен с кабелем 342 для приема электрической энергии и для передачи зарегистрированных сейсмических данных в систему 338 обработки. Сейсмический датчик 354 может включать в себя одно или несколько из следующих устройств: гидрофон, геофон, акселерометр, датчик микроэлектромеханической системы (MEMS), оптический датчик или другие известные датчики. Сейсмический датчик 354 может крепиться к внутренней части корпуса 352 кронштейном 366. В одном из приложений сейсмический датчик 354 крепится к поршню 358, чтобы перемещаться вместе с ним.
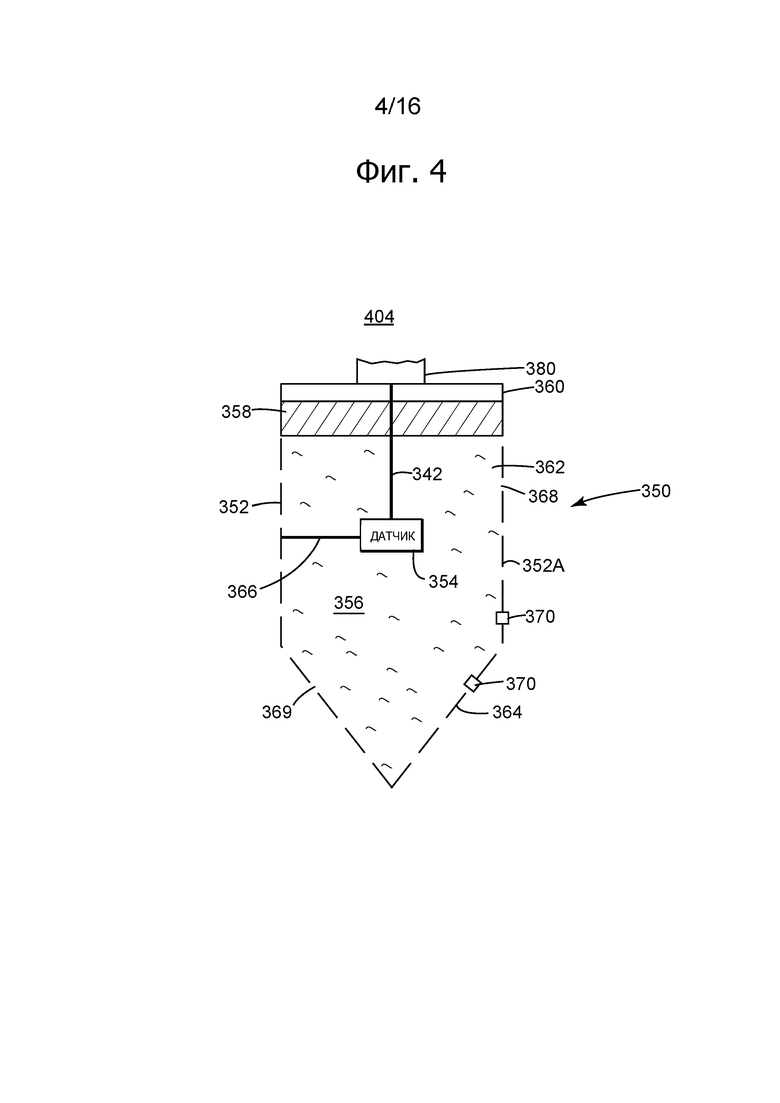
Связывающий материал 356 может представлять собой текучую среду, желатиновый или гранулированный материал. Например, связывающий материал может быть силиконовым гелем. Кроме того, связывающий материал может представлять собой две несмешивающиеся текучие среды с различной плотностью, так что одна текучая среда может быть более желатинированной и пригодной для связывания под поверхностью, а более текучая среда может оставаться сверху и герметизировать проходы в корпусе. Корпус 352 имеет определенное количество проходов 368, выполненных на его боковых сторонах 352А, как это показано на фиг. 4. В одном из вариантов проходы 368 могут представлять собой простые отверстия в боковых стенках 352А корпуса 352. В одном из вариантов закупоренные проходы 369 могут быть также сформированы в концевой части 364 корпуса 352. В одном из вариантов могут присутствовать оба типа проходов 368 и 369. В одном из вариантов плотность проходов на единицу площади изменяется от концевой части 364 к верхней части. В одном из вариантов диаметр проходов больше в направлении концевой части и меньше в направлении верхней части. Упомянутые проходы предназначены для выпуска связывающего материала 356 наружу корпуса 352 после того, как сенсорное устройство размещено в грунте.
Для того чтобы удерживать связывающий материал 356 внутри корпуса 352, когда сенсорное устройство 404 находится в воздухе, колпачки 370 (для простоты на чертеже показаны только два из них) закупоривают проходы 368 и/или 369. Эти колпачки могут изготавливаться из различных материалов, например, из пластика, дерева, композита, эпоксидной смолы, бумаги, пробки. В одном из вариантов осуществления колпачки свободно крепятся к проходам, так что когда сенсорное устройство сталкивается с грунтом, колпачки выпадают из корпуса.
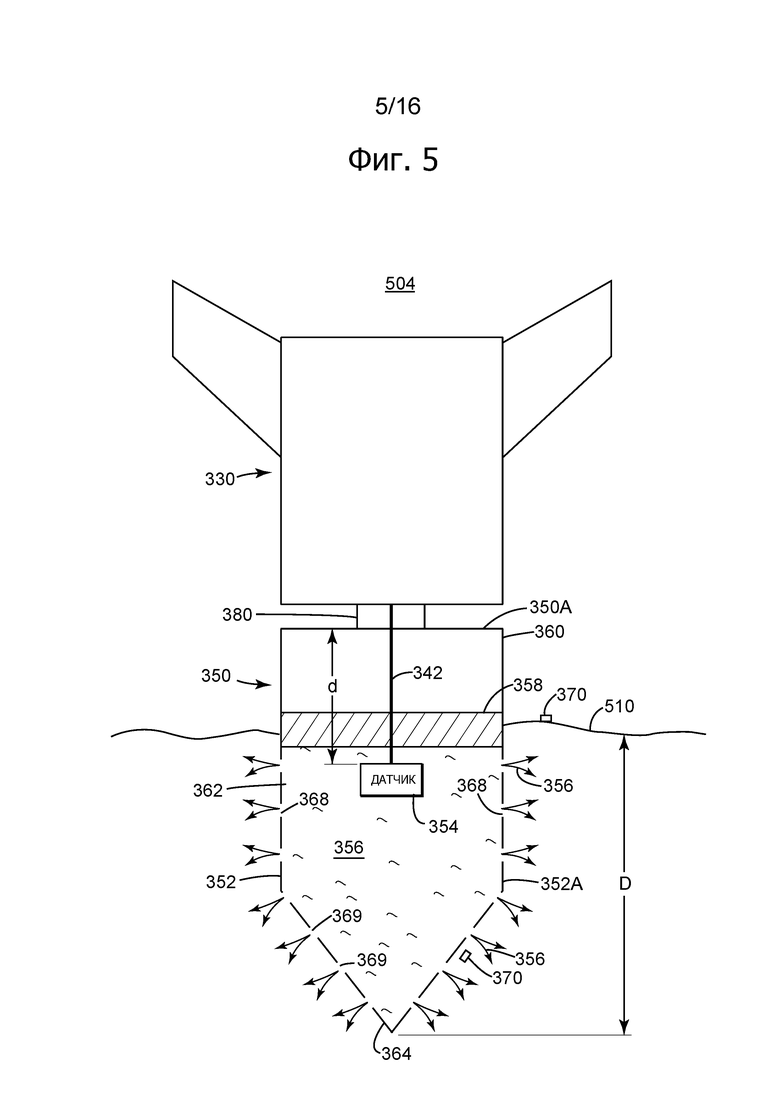
После того как сенсорное устройство ударяется о грунт и проникает в него, связывающий материал высвобождается в окружающую среду вокруг сенсорного устройства. Это происходит под воздействием поршня 358. При ударе сенсорного устройства о грунт момент инерции поршня 358 перемещает его вниз, как это показано на фиг. 5, что приводит к выталкиванию связывающим материалом колпачков 370 (если они уже не выпали из-за ударного воздействия) и распределению связывающего материала вокруг корпуса 352. На фиг. 5 показаны первая камера 360, которая больше, и вторая камера 362, которая меньше, чем соответствующие камеры на фиг. 4. На фиг. 5 также показаны колпачки 370, лежащие вокруг сенсорного устройства, и связывающий материал 356, выталкиваемый через проходы 368 и 369. В одном из применений в первой камере 360 может располагаться механизм страгивания поршня с места (на чертеже не показан) для помощи поршню 358 в перемещении в направлении концевой части 364, что приводит к выпадению колпачков и открыванию проходов и заставляет связывающий материал вытекать из нижней секции сенсорного устройства.
Как показано на фиг. 5, нижняя секция 350 сенсорного устройства 504 может проникать в грунт на определенную глубину D от земной поверхности 510. Это расстояние зависит от многих факторов, таких как вес сенсорного устройства, высота, с которой сбрасывается сенсорное устройство, типа почвы и т.д. В одном из вариантов осуществления изобретения эти факторы учтены при проектировании сенсорного устройства, что приводит к более чем одной конфигурации сенсорного устройства. Другими словами, можно иметь набор сенсорных устройств, причем одна разновидность подходит для плотного грунта, а другая разновидность подходит для рыхлого грунта и т.д.
На фиг. 5 показано сенсорное устройство, имеющее концевой участок 364, выполненный в виде острия, который подходит для рыхлого грунта. Кроме того, на фиг. 5 показано, что расстояние D от верхнего конца 350A нижней секции 350 до первого прохода 368 рассчитывается таким образом, что первый проход оказывается в грунте (то есть все проходы находятся под землей). В одном из приложений некоторые проходы могут оставаться над землей для герметизации перехода датчик-земля-воздух заполняющим материалом. Чем тверже или плотнее грунт, тем больше расстояние D. Например, если грунт состоит только из песка, и предполагается, что нижняя секция 350 полностью войдет в песок, то расстояние d может равняться нулю.
Однако если почва является очень твердой, плотной, то концевой участок 364 может выполняться достаточно круглым, как это показано на фиг. 6. В таком случае нижняя часть может вообще не проникать в грунт. Однако предполагается, что связывающий материал 356 будет выходить из корпуса 352 и контактировать с грунтом, так что между сейсмическим датчиком 354 и грунтом обеспечивается хороший контакт через связывающий материал.
Нижняя секция может изготавливаться из различных материалов. В одном из приложений, когда грунт мягкий и ожидается, что нижняя секция будет проникать в грунт, она может выполняться из пластмассы или металла. В одном из вариантов, если желательно не оставлять следов после сейсморазведки, нижняя секция может изготавливаться из биоразлагаемого материала. В еще одном варианте нижняя секция может выполняться из материала, например глины, который будет разрушаться при ударе о грунт для быстрого высвобождения связывающего материала.
Связывающий материал, хранящийся во второй камере нижней секции, сохраняет свое состояние. Однако когда он вытесняется в объем, окружающий сенсорное устройство, связывающий материал создает границу раздела между сейсмическим датчиком и грунтом, что обеспечивает надлежащий контакт. Если связывающий материал представляет собой текучую среду или желатинообразный материал, то при развертывании, оказавшись снаружи корпуса, связывающий материал может изменять свое состояние, например, твердеть, чтобы обеспечивать улучшенный контакт. В другом варианте, если связывающий материал, находящийся во второй камере, представляет собой гель, то связывающий материал будет сохранять свое состояние, даже оказавшись снаружи корпуса. В зависимости от состава связывающего материала и типа грунта (плотный или рыхлый), когда связывающий материал выталкивается за пределы полости, он может оставаться в своем исходном состоянии, затвердевать или находиться в промежуточном состоянии.
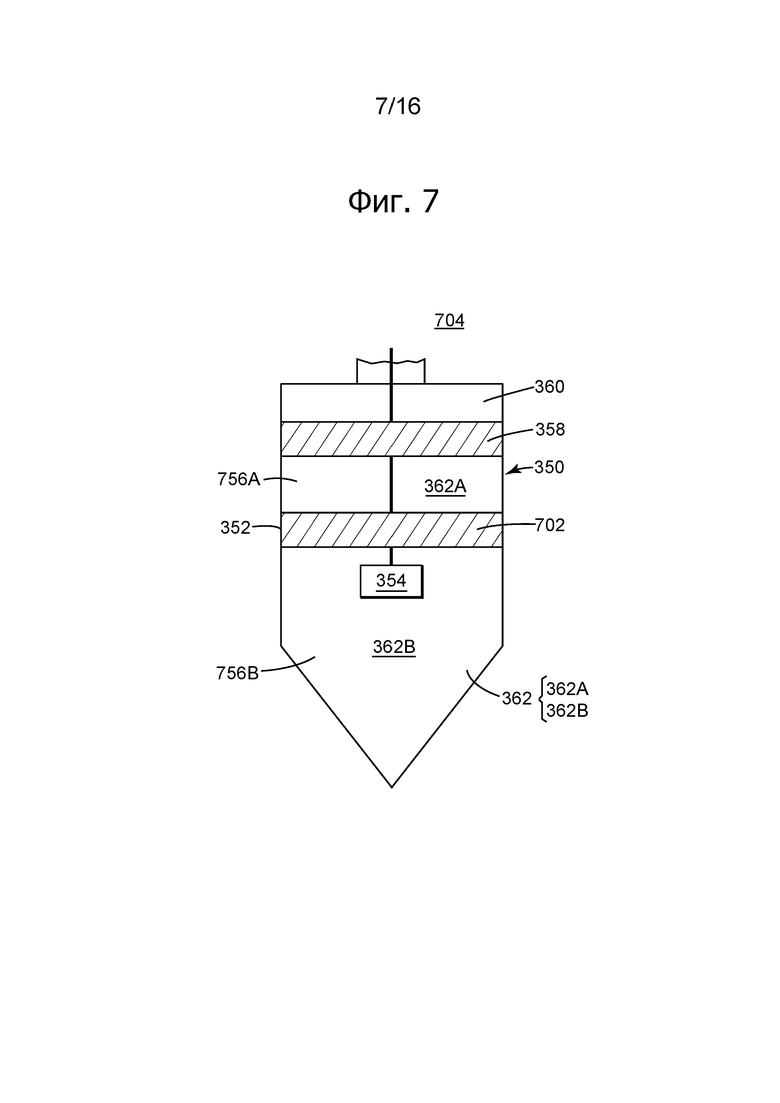
В одном из вариантов осуществления изобретения, показанном на фиг. 7, вторая камера 362 имеет еще один поршень 702, который делит вторую камеру на верхнюю и нижнюю камеры 362А и 362В соответственно. Верхняя камера 362А может содержать первый связывающий материал 756А, а нижняя камера 362В может содержать второй связывающий материал 756В. Первый и второй связывающие материалы могут отличаться друг от друга. В одном из вариантов первый связывающий материал может находиться в состоянии геля, тогда как второй связывающий материал может находиться в текучем состоянии. В одном из приложений первый и второй связывающие материалы химически реагируют друг с другом вне корпуса, чтобы изменить свое состояние.
После того как связывающий материал затвердел снаружи корпуса и обеспечен хороший контакт между сейсмическим датчиком и грунтом, сенсорное устройство готово к регистрации сейсмических данных. Система обработки данных, находящаяся в верхней секции, может быть запрограммирована на выдачу команды датчику начать регистрацию сейсмических данных через определенное время после того, как сенсорное устройство приземлилось, и связывающий материал завулканизировался (или затвердел). Зарегистрированные сейсмические данные хранятся в системе обработки данных в течение заданного временного интервала или просто временно сохраняются как в буфере. Когда сейсморазведка закончена, зарегистрированные сейсмические данные могут быть извлечены различными способами. Альтернативно, сейсмические данные могут передаваться во время сейсмической разведки без какого-либо хранения.
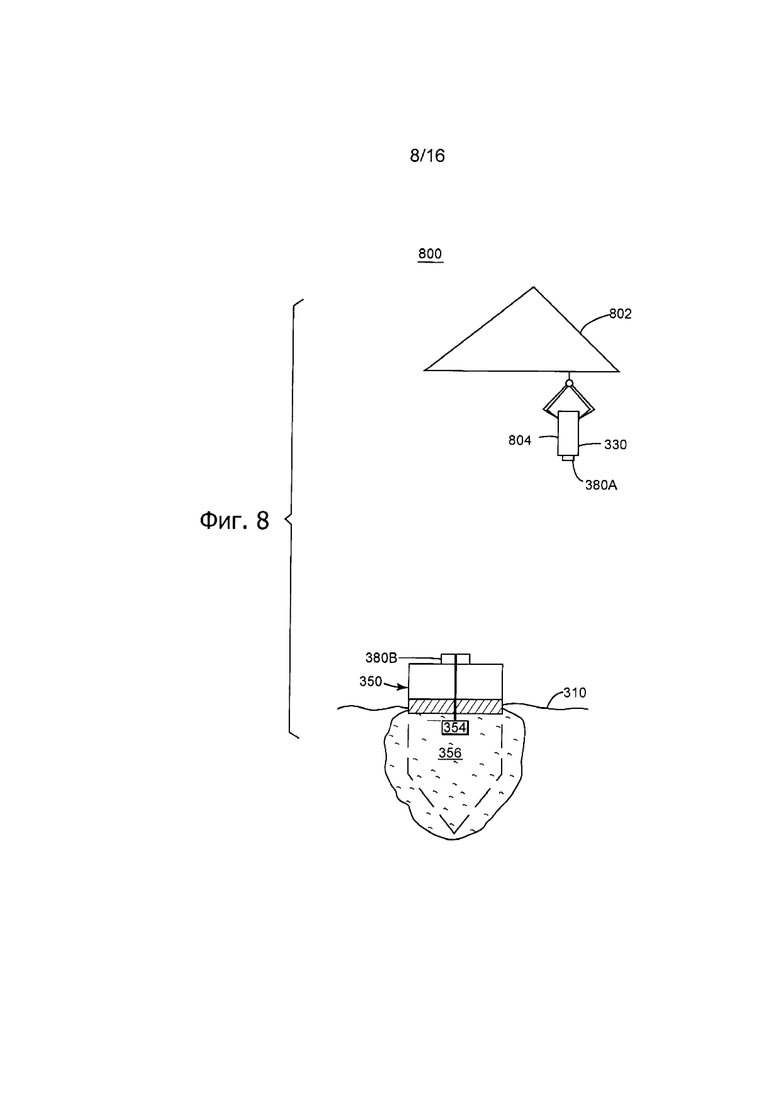
Один из подходов состоит в том, чтобы отправить летательный аппарат 102 для возвращения верхней секции 330 сенсорного устройства 300, оставив нижнюю секцию 350 в грунте, как это показано на фиг. 8. На фиг. 8 показана система 800 сейсморазведки, включающая в себя летательный аппарат 802 и сенсорное устройство 804. Сенсорное устройство 804 установлено в грунте. После регистрации сейсмических данных в течение заданного времени летательный аппарат 802 возвращается, чтобы забрать верхнюю секцию 330 сенсорного устройства 804. Каждая из верхней и нижней секций 330 и 350 имеет соответствующие соединительные разъемы 380А и 380В. Соединительные разъемы 380A и 380B обеспечивают, как рассматривалось выше, электрическую и информационную связь между верхней и нижней секциями. Они соединяются по типу папа/мама, и когда летательный аппарат тянет верхнюю секцию независимо от нижней части, два соединительных разъема легко отсоединяются друг от друга. Верхняя секция затем доставляется на машину управления или в другое место, где хранящиеся на борту сейсмические данные либо собираются, либо остаются для дальнейшего сбора данных. Процесс сбора может выполняться беспроводным способом или физическим удалением съемной памяти из верхней секции 330 и считыванием этой памяти на машине управления.
Другая возможность заключается в перемещении устройства сбора данных мимо каждого сенсорного устройства и беспроводной передаче сейсмических данных с сенсорного устройства на устройство сбора данных. Устройством сбора данных может быть ноутбук, самолет, грузовой автомобиль и т.д. В одном из приложений устройством сбора данных может быть летательный аппарат 102. Могут использоваться другие известные из уровня техники способы сбора сейсмических данных.
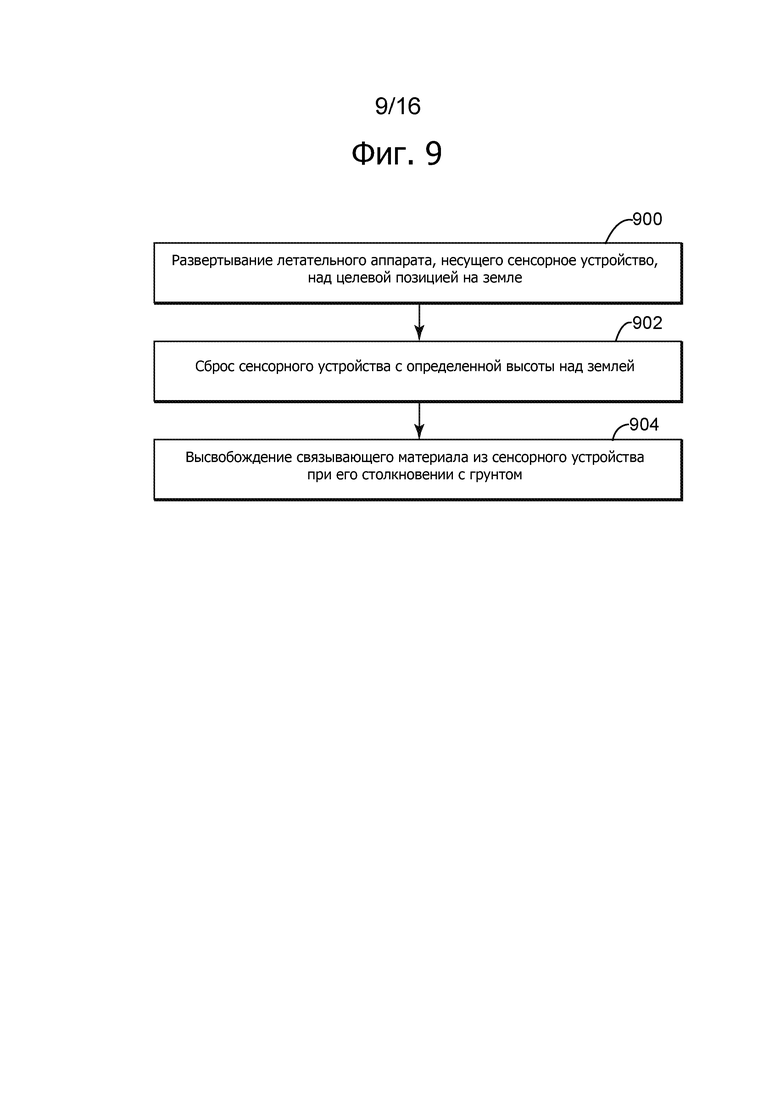
Способ использования сенсорного устройства 300 рассматривается со ссылкой на фиг. 9. Способ включает в себя этап 900 развертывания воздушного судна, которое носит сенсорное устройство, над целевой позицией на земле, этап 902 сброса сенсорного устройства с определенной высоты над землей и этап 904 высвобождения связывающего материала из сенсорного устройства при соударении с грунтом. Связывающий материал обеспечивает улучшенное связывание расположенного внутри сенсорного устройства сейсмического датчика с грунтом.
Далее со ссылкой на фиг. 10 рассматривается автоматизированная система развертывания и возвращения сенсорных устройств с использованием летательного аппарата и управляемого свободного падения. В таком способе может использоваться один или несколько летательных аппаратов. Для большей эффективности используется множество летательных аппаратов. Летательные аппараты могут быть беспилотными. Для облегчения развертывания и возвращения сенсорного устройства внешняя форма корпуса сенсорного устройства может быть трубчатой. Каждый летательный аппарат может оснащаться системой, облегчающей обнаружение датчика, например, радиолокационной системой или устройством эхолокации или аналогичным устройством.
В рассматриваемом способе учитываются требуемые места развертывания, системные условия и погодные и/или полевые условия. Это обеспечивается с помощью либо предустановленной системы управления, либо встроенных систем. Оба типа систем могут выполняться с алгоритмами обучения, чтобы обучаться в полевых условиях и корректировать запланированный курс в соответствии с изменением полевых и системных условий каждого летательного аппарата в группе (например, заряда батареи, неисправности и т.д.). Некоторые из принимаемых во внимание такой системой соображений - это приоритет/оптимизация места развертывания и места сброса в зависимости от погодных условий с целью более точного позиционирования развертываемого датчика (определение точки сброса) и т.д.
В таком варианте осуществления изобретения система итеративно и, по возможности, непрерывно использует доступные данные (системные условия, условия местоположения и полевые условия) для каждого этапа способа (хотя в некоторых случаях некоторые этапы могут использовать набор предустановленных данных для упомянутых трех условий). Сенсорные устройства могут храниться в полевом хранилище или на транспортном средстве в полевых условиях, а летательные аппараты могут располагаться в полевых условиях на транспортном средстве или на базе, где они могут заправляться, могут извлекаться или считываться данные и проводиться любое обслуживание.
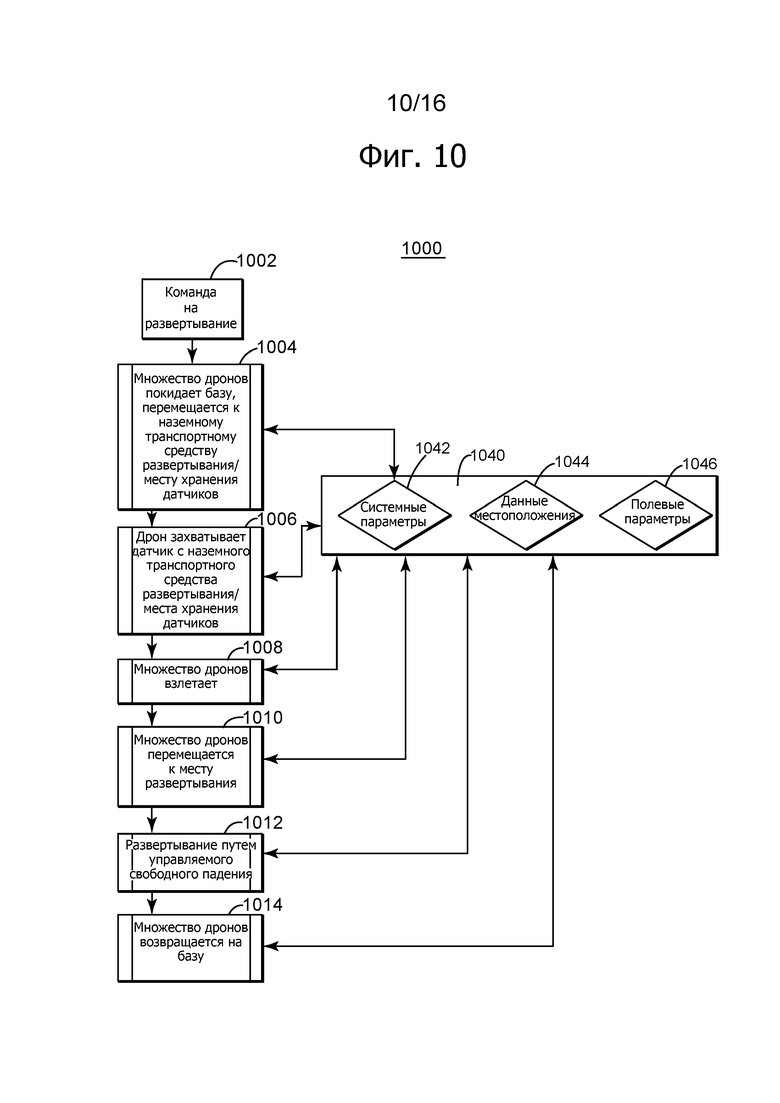
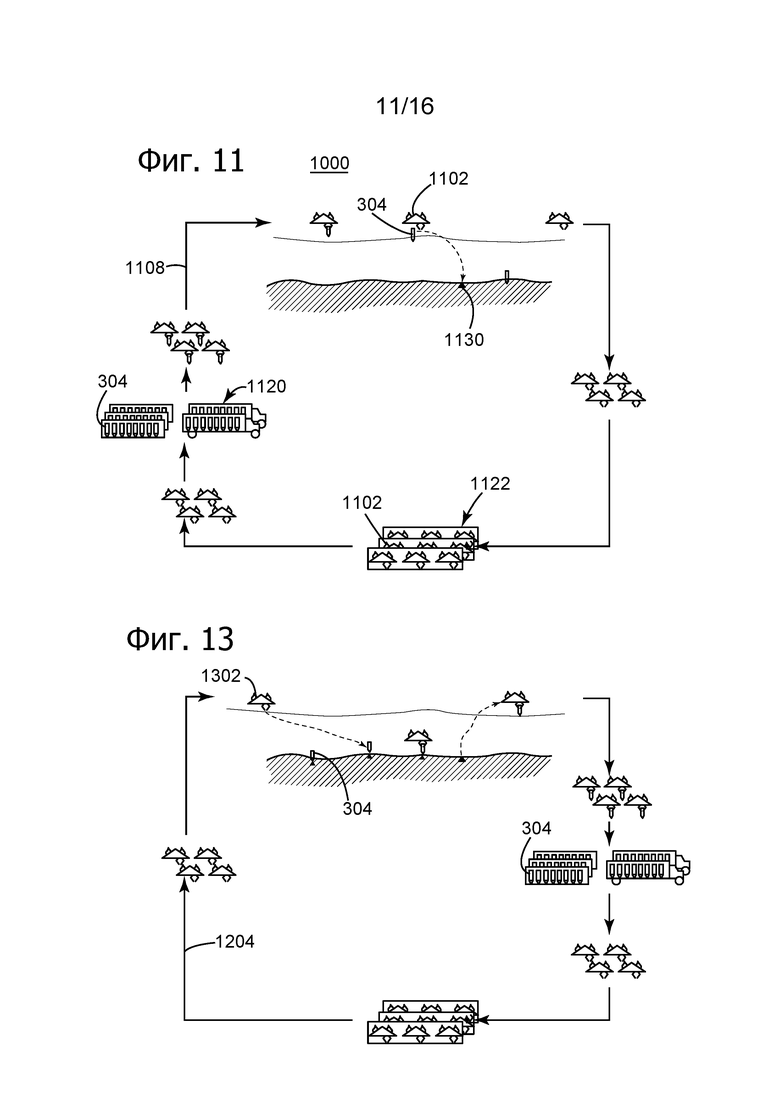
В частности, как показано на фиг. 10, система 1000 сейсмической разведки принимает на этапе 1002 от описываемого ниже контроллера команду на развертывание сенсорных устройств 304. На фиг. 11 показана система 1000, включающая в себя датчики 304, расположенные в поле в установленном месте 1120, и летательные аппараты 1102, расположенные в другом месте 1122. Как отмечено выше, эти два места могут быть мобильными (т.е. расположенными на грузовых автомобилях) или стационарными (базовыми станциями). Кроме того, эти два места могут обеспечивать функции поддержки, такие как передача данных, зарядка аккумулятора и другие функции обслуживания. Эти два места могут быть распределены по многим позициям в зоне сейсморазведки для повышения эффективности.
На этапе 1004 группа летательных аппаратов покидает свое местоположение 1122 и перемещается в место 1120 расположения датчиков для забора соответствующих сенсорных устройств. Летательный аппарат и сенсорные устройства взаимодействуют с модулем 1042 системных параметров, который является частью системы 1040 координации. Модуль 1042 системных параметров может включать в себя приемопередатчик для связи с летательным аппаратом и сенсорными устройствами, процессор для обработки полученных данных и память для хранения этих данных. Данные, которыми обменивается модуль 1042 системных параметров с летательными аппаратами и сенсорными устройствами, могут включать в себя, например, состояние аккумуляторной батареи каждого устройства, общее состояние каждого устройства, состояние готовности каждого устройства и/или идентификационный номер каждого устройства. Система 1040 координации также может включать в себя модуль 1044 данных о местоположении и модуль 1046 данных полевых параметров. Модуль 1044 данных о местоположении может хранить информацию о местоположении каждого летательного аппарата и/или сенсорного устройства. Информация о местоположении может передаваться каждым устройством в модуль. Каждое устройство может иметь свой собственный приемник GPS для определения информации о местоположении. В другом варианте осуществления система 1040 координации может включать в себя приемник GPS и радиолокационную систему для определения положения каждого сенсорного устройства и летательного аппарата. Упомянутый модуль 1046 данных полевых параметров может хранить информацию о ветре, температуре, влажности и т.д. в каждой зоне сейсмической разведки. Эта информация может быть получена от специализированной метеослужбы или измерена на месте или может быть получена обоими способами.
На этапе 1006 каждый летательный аппарат загружает одно или несколько соответствующих сенсорных устройств 304 в месте 1120 их расположения. Осуществляется обмен информацией, связанной с этим этапом, с системой 1040 координации. Затем, на этапе 1008, группа летательных аппаратов взлетает, как это также показано на фиг. 11, и на этапе 1010 переносит сенсорные устройства 304 к месту их развертывания. На этапе 1012 летательный аппарат 1102 сбрасывает соответствующее сенсорное устройство 304 в целевую позицию 1130. На этапе 1014 после того, как летательный аппарат сбросил все свои сенсорные устройства (если транспортируется более одного сенсорного устройства), он возвращается к своей базе, находящейся в месте 1122. Следует отметить, что на фиг. 10 показано, что на каждом этапе 1004-1014 может осуществляться обмен информацией с системой 1040 координации для обновления информации о летательных аппаратах и сенсорных устройствах в модуле 1044 данных о местоположении и модуле 1042 системных параметров.
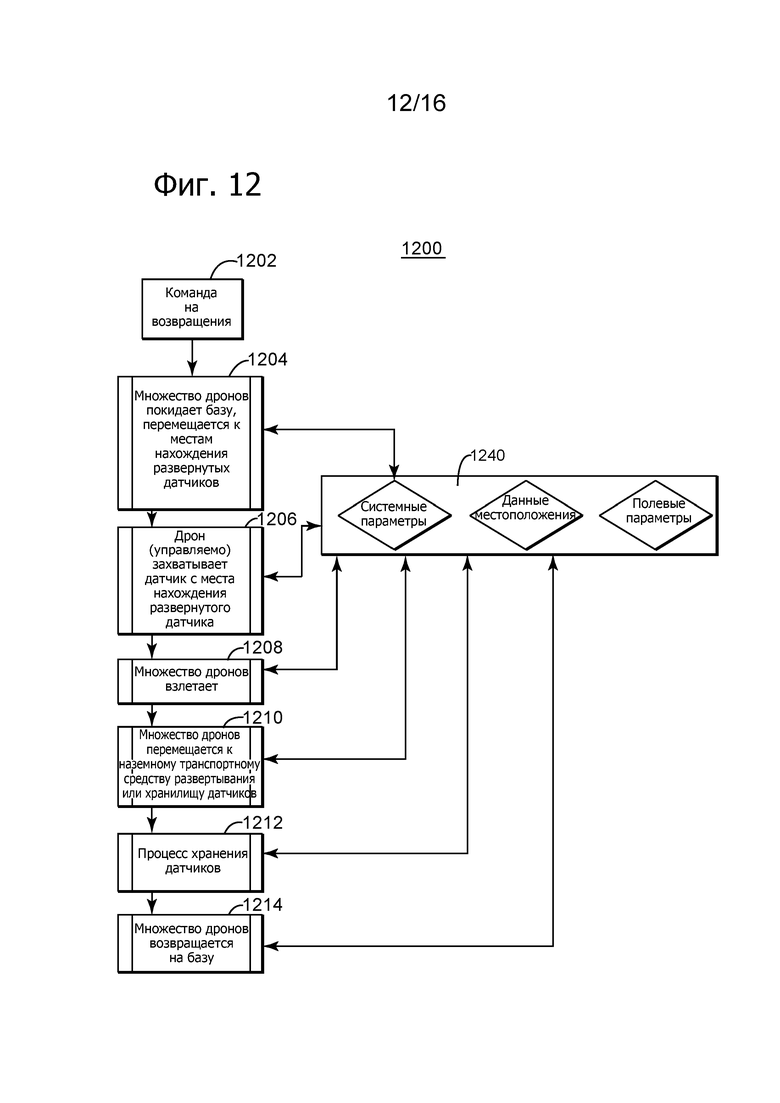
На фиг. 12 и 13 показан процесс возвращения сенсорных устройств после сбора сейсмических данных. Процесс начинается с этапа 1202, на котором контроллер выдает команду на возврат. На этапе 1204 летательные аппараты покидают базу и перемещаются к развернутым сенсорным устройствам 304. На этапе 1206 летательный аппарат 1302 захватывает верхнюю секцию соответствующего сенсорного устройства 304 и отделяет ее от соответствующей нижней секции. В одном из вариантов осуществления, когда сенсорное устройство состоит из одной секции, летательный аппарат извлекает всё сенсорное устройство. На этапе 1208 группа летательных аппаратов взлетает со своими сенсорными устройствами, и на этапе 1210 летательные аппараты доставляют сенсорные устройства на их базы (например, в хранилище сенсорных устройств, наземное мобильное устройство хранения и т.д.). На этапе 1212 базы могут передавать данные с сенсорных устройств и перезаряжать их батареи. На этапе 1214 группа летательных аппаратов возвращается к своей базе для обслуживания и/или заправки и/или других функций поддержки. Подобно варианту, показанному на фиг. 10, система координации может связываться на каждом этапе с сенсорными устройствами и/или летательными аппаратами.
В другом варианте, который рассматривается ниже, система 1000 сейсмической разведки может быть дополнительно улучшена, чтобы обучаться на ранее проведенных действиях, т.е. чтобы обладать возможностью машинного обучения. Возможность машинного обучения может быть реализована соответствующим процессором/контроллером, как это описано выше.
Как описано выше, для получения высокой плотности съемки необходимо развернуть в поле и возвратить очень большое количество сенсорных устройств. Этот процесс традиционно выполняется большой группой персонала в поле либо вручную, либо с использованием тяжелой или переносной специализированной техники. Это длительный по времени процесс, который может быть сопряжен с проблемами неточного размещения датчиков во время развертывания, повреждения датчиков во время развертывания, с человеческим фактором и т.д.
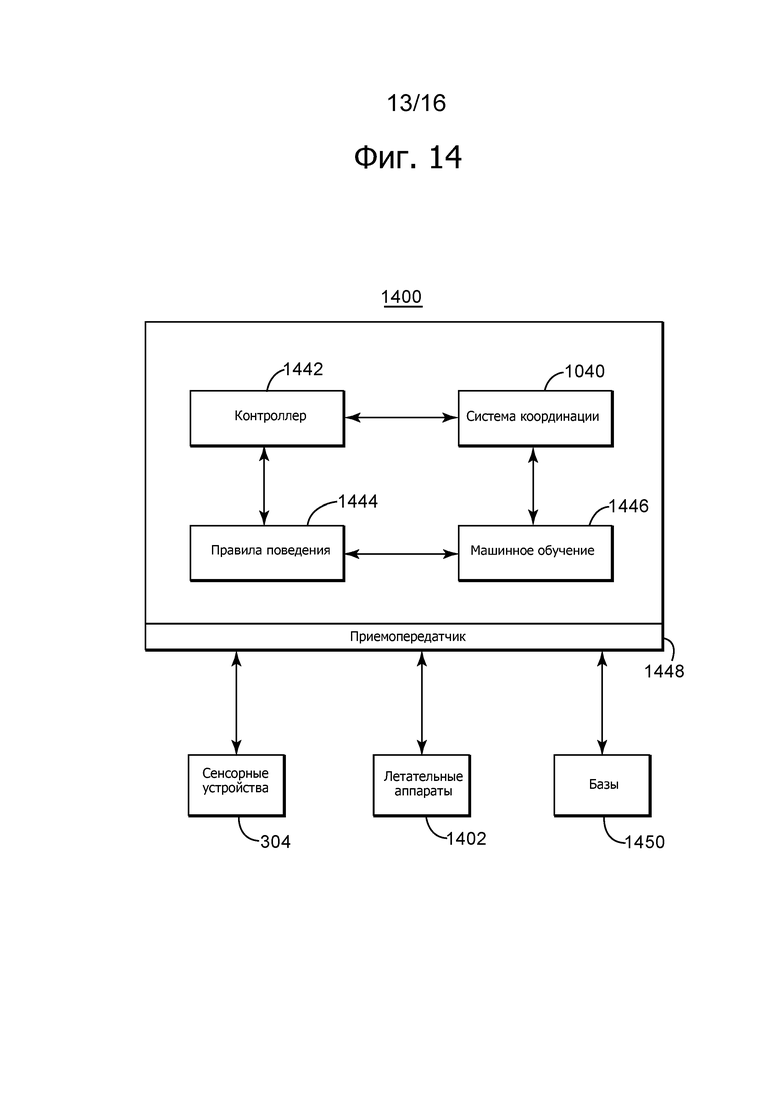
Новая система 1400 развертывания/возвращения включает в себя контроллер 1442, который координирует работу различных рассматриваемых модулей. Система 1400 также включает в себя описанную ранее систему 1040 координации. Система 1400 также может включать в себя модуль 1444 правил поведения и модуль 1446 машинного обучения. Два последних упомянутых модуля рассматриваются ниже. Новая система 1400 может взаимодействовать с сенсорными устройствами 304, летательными аппаратами 1402 и одной или несколькими базами 1450 сенсорных устройств и/или летательных аппаратов. В системе 1400 может присутствовать приемопередатчик 1448 для обеспечения связи с сенсорными устройствами, летательными аппаратами и их базами.
Новая система 1400 развертывания/возвращения позволяет развертывать сенсорные устройства путем свободного падения с летящего летательного аппарата с учетом окружающей среды, движения летательного аппарата и топографии поверхности. В модуле 1444 рассчитываются правила поведения в свободном падении в реальном времени на основе данных из системы 1040 координации, которые включают в себя параметры окружающей среды (ветер, температуры, высота полета группы и т.д.), параметры движения группы летательных аппаратов (расстояние между летательными аппаратами, скорость и т.д.) и параметры местности (тип грунта и т.д.).
Система обеспечивает активацию сенсорных устройств сразу после или перед сбросом для продления срока эксплуатации батареи. Управление группой летательных аппаратов и решения принимаются в реальном времени благодаря расчету правил поведения группы в режиме реального времени. Каждый модуль 1444 правил поведения группы включает в себя комбинацию индивидуальных правил поведения летательных аппаратов.
Система 1400 сейсмической разведки обеспечивает самостоятельный выбор в режиме реального времени лучшего летательного аппарата(ов) для сброса сенсорных устройств в конкретные позиции. Модуль 1446 машинного обучения обеспечивает возможность самообучения, включая использование технологий машинного обучения/технологий нейронных сетей для оптимизации будущих действий (скорости, эффективности, оптимизации правил поведения и т.д.). Будущие действия могут совершаться на других полях или на других участках одного и того же поля/области развертывания. Возможности самообучения также включают в себя сбор информации о поверхности земли.
Сбор информации о местности может выполняться сенсорным устройством при столкновении с грунтом и во время съемки. Данные передаются в режиме реального времени другим участникам операции (группам, летательным аппаратам и удаленному и/или полевому центру управления) с помощью сети связи (например, приемопередатчика 1448), которые является частью системы 1400 развертывания/возврата. Благодаря петле самообучения и дополнительным знаниям ландшафта, группа и летательные аппараты оптимизируют необходимую тягу и требуемую энергию вертикального перемещения для обеспечения связывания сенсорного устройства с грунтом или его возвращения. Знания группы передаются другим группам и/или отдельному летательному аппарату во время совместных действий.
Возможные последовательности операций развертывания и возвращения показаны на фиг. 15 и 16. Следует отметить, что на фиг. 15 и 16 показаны этапы, представленные на фиг. 10 и 12 соответственно. Кроме того, показаны модуль 1444 правил поведения, модуль 1446 обучения и модуль 1040 координации, взаимодействующие с этими этапами. Система итеративно и, по возможности, постоянно использует доступные данные из модуля 1040 координации для каждого этапа процесса (хотя в некоторых случаях некоторые этапы могут использовать набор предустановленных данных для внешних условий). Следует отметить, что модуль 1040 координации содержит новый модуль 1043, который относится к условиям окружающей среды (например, скорости ветра на высоте, на которой летят летательные аппараты).
Одним или несколькими преимуществами, связанными с такими вариантами осуществления изобретения, является быстрое и точное развертывание и возвращение сенсорных устройств, более безопасные действия в поле, лучшее обращение с сенсорными устройствами (меньшая вероятность повреждения), способность интеллектуального принятия решений на основе самообучения и возможность интеллектуального управления группами летательных аппаратов.
Модуль 1447 совершенствования модели (показанный на фиг. 15 как расположенный в модуле 1446 обучения) может быть сконфигурирован в программном обеспечении для выполнения следующих функций: (a) динамическое заполнение системы баз данных, включающей в себя все типы данных (системные параметры, условия окружающей среды, данные о местоположении, условия местности, требуемые планы действий и т.д.); (б) обновление самообучения/машины и системы/модели обучения/автоматизированного совершенствования; (в) обновление и совершенствование модуля правил поведения с учетом функций (a) и (б); (г) обновление и совершенствование выбора летательного аппарата (наилучшего летательного аппарата для выполнения конкретного сброса/задачи и т.д.) с учетом функций (a) и (б).
Что касается выбора летательного аппарата, то эта функция позволяет выбирать наилучший доступный летательный аппарат для выполнения сброса и/или контроля качества в точках местности от T1 до Tn. Это может быть описано следующей векторной функцией:
 ,
,
где FDС = функция выбора летательного аппарата;
AVi = летательный аппарат номер i;
T = время;
SP = системные параметры в момент времени T;
IM = совершенствование модели;
FL = местоположение группы в момент времени T;
EC = условия окружающей среды в момент времени T; и
TC = параметры местности в момент времени T.
Рассматривая один летательный аппарат, сброс сенсорного устройства осуществляется под управлением модуля правил поведения, который включает в себя логику, определенную следующим образом. Концепция управляемого свободного падения, упомянутая выше в отношении спуска каждого сенсорного устройства, описывает последовательные положения (X, Y, Z) сенсорного устройства при перемещении для достижения цели на поверхности земли после запуска из пусковой системы летательного аппарата. В одном из вариантов осуществления управляемая траектория свободного падения может определяться с помощью непрерывного набора "правил поведения", который предсказывает положение сенсорного устройства в момент времени Т путем учета данных из модуля 1043 условий окружающей среды, модуля 1447 совершенствования модели (который может располагаться в модуле 1446 машинного обучения), модуля 1042 системных параметров, модуля 1044 данных о местоположении и модуля 1046 данных о параметрах местности. Таким образом, позиции Px, Py и Pz заданного сенсорного устройства могут быть записаны как:
 ,
,
где
Fc = функция правил поведения;
T = время;
SP = системные параметры в момент времени T;
IM = совершенствование модели;
FL = местоположение группы летательных аппаратов в момент времени T;
EC = условия окружающей среды в момент времени T; и
TC = параметры местности в момент времени T.
Эта функция Fc является основой модуля правил. Правила поведения варьируются на основе каждого обновления с этапов совершенствования модели и выбора летательного аппарата.
Системные параметры, контролируемые модулем 1042 системных параметров, измеряются и передаются другим сенсорным устройствам и/или летательным аппаратам не только во время диагностики перед развертыванием, например, на базе или в месте нахождения в поле, но и после развертывания с использованием различных средств связи (например, с помощью приемопередатчиков). Обмениваемые данные могут включать в себя данные от летательных аппаратов и/или группы летательных аппаратов или от других сенсорных устройств.
Системные параметры могут включать в себя, но не ограничиваются этим, уровень заряда батареи, тип летательного аппарата, конфигурацию группы, положение летательного аппарата внутри группы и т.д.
Условия окружающей среды измеряются и транслируются между летательными аппаратами и сенсорными устройствами. Эти условия могут включать в себя данные систем локального мониторинга состояния (таких как датчики скорости ветра, датчики температуры, датчики твердых частиц и т.д.), которые обеспечивают основу базы знаний и обновляется по мере необходимости в полевых условиях. Также можно получать локально измеренные летательным аппаратом аналогичные параметры, которые передаются и добавляются к базе знаний для ее обновления.
Данные о местоположении относятся как к абсолютному, так и относительному положению летательного аппарата и/или датчиков. Абсолютное положение каждого летательного аппарата группы может быть получено различными способами определения местоположения (например, с помощью приемника глобальной спутниковой навигационной системы, инерциальной системы и т.д.). Результаты измерения относительного и абсолютного местоположения передаются в базу знаний для регулярного обновления правил поведения. Данные о местоположении используются для четырех основных функций: (1) определения местоположения/формы группы летательных аппаратов, (2) определения местоположения летательного аппарата, (3) определения относительного местоположения летательного аппарата в группе; и (4) определения требуемого места развертывания.
Данные о параметрах местности из модуля 1046 данных о параметрах местности могут включать в себя предварительно известные параметры из данных географических информационных систем, параметры, измеренные различными средствами в реальном времени на поле, параметры, измеренные в реальном времени летательными аппаратами в процессе развертывания/проверки качества контакта (выполняемой сенсорным устройством при соударении с грунтом и во время съемки). Упомянутые данные могут передаваться в реальном времени другим участникам операции (группам летательных аппаратов, летательным аппаратам и удаленному и/или полевому центру управления) через сеть связи, которая является частью системы управления.
Вышеописанные алгоритмы и способы могут быть реализованы в вычислительном устройстве, показанном на Фиг. 17. Аппаратные средства, встроенные программы, программное обеспечение или их комбинация могут использоваться для выполнения различных этапов и операций, описанных в данном документе. Показанное на Фиг. 17 вычислительное устройство 1700 представляет собой типичную вычислительную структуру, которая может использоваться в такой системе.
Типичное вычислительное устройство 1700, подходящее для выполнения действий, описанных в примерных вариантах осуществления, может включать в себя сервер 1701. Упомянутый сервер 1701 может включать в себя центральный процессор 1702, связанный с оперативным запоминающим устройством (ОЗУ) 1704 и с постоянным запоминающим устройством (ПЗУ) 1706. ПЗУ 1706 может также представлять собой другие типы носителей для хранения программ, такие как программируемое ПЗУ (PROM), стираемое программируемое ПЗУ (EPROM) и т.д. Процессор 1702 может обмениваться данными с другими внутренними и внешними компонентами через устройство 1708 ввода/вывода и шину 1710, чтобы передавать сигналы управления и т.п. Процессор 1702 выполняет множество известных из уровня техники функций в соответствии с командами программного обеспечения и/или встроенной программы.
Сервер 1701 также может включать в себя одно или несколько устройств хранения данных, таких как накопители 1712 на жестких дисках, запоминающие устройства 1714 на компакт-дисках и другое оборудование, способное считывать и/или хранить информацию, такое как цифровой универсальный диск DVD и т.д. В одном из вариантов осуществления программное обеспечение для выполнения вышеописанных этапов может храниться и распространяться на ПЗУ на компакт-дисках или цифровых универсальных дисках DVD 1716, запоминающем устройстве 1718 USB или другом типе носителя, способного портативно хранить информацию. Эти носители данных могут вставляться и считываться устройствами, такими как запоминающие устройство 1714 на компакт-дисках, дисковый накопитель 1712 и т.д. Сервер 1701 может соединяться с устройством 1720 отображения, которое может представлять собой любой известный тип дисплея или презентационного экрана, такой как ЖК-дисплей, плазменный дисплей, электронно-лучевая трубка и т.д. Имеется интерфейс 1722 ввода данных пользователем, включающий в себя один или несколько механизмов пользовательского интерфейса, таких как мышь, клавиатура, микрофон, сенсорная панель, сенсорный экран, система распознавания голоса и т.д.
Сервер 1701 может соединяться с другими устройствам, такими как источники, детекторы и т.д. Сервер может быть частью более крупной сети, например, глобальной сети, такой как сеть 1728 Интернет, которая обеспечивает конечное соединение с различными наземными линиями и/или мобильными вычислительными устройствами.
В представленных здесь вариантах осуществления изобретения предлагаются сенсорное устройство и способ сбора сейсмических данных с улучшенным связыванием между сейсмическим датчиком и грунтом. Как отмечено выше, грунт может быть над или под водой. Другими словами, рассмотренные выше варианты осуществления могут быть реализованы в морском варианте, в котором функции летательного аппарата выполняет судно или подводная лодка или автономное подводное транспортное средство, сенсорное устройство управляемо спускается на дно океана, его нижняя часть входит в грунт на дне океана и высвобождает связывающий материал в дно океана для обеспечения лучшего контакта. Сенсорные устройства, которые используются на дне океана, известны в уровне техники как морские донные станции. Следует понимать, что данное описание не предполагает ограничение изобретения. Напротив, предполагается, что описанные варианты осуществления охватывают альтернативные варианты, модификации и эквиваленты, которые включены в рамки объема и сущности изобретения, как оно определено прилагаемой формулой изобретения. Кроме того, в подробном описании раскрытых вариантов осуществления подробно изложены многочисленные конкретные детали, чтобы обеспечить полное понимание заявленного изобретения. Однако специалисту в данной области техники очевидно, что различные варианты осуществления могут быть реализованы на практике без таких конкретных деталей.
Хотя отличительные признаки и элементы раскрытых вариантов осуществления описаны в конкретных комбинациях, каждый отличительный признак или элемент могут использоваться отдельно от других признаков и элементов вариантов осуществления или в различных комбинациях с другими раскрытыми в данном документе отличительными признаками и элементами.
В данном письменном описании приведены примеры раскрываемого объекта изобретения, позволяющие любому специалисту в данной области техники практиковать то же самое, включая создание и использование любых устройств или систем и осуществление любых встроенных способов. Патентоспособный объем объекта изобретения определяется прилагаемой формулой изобретения и может включать в себя другие примеры, которые могут прийти на ум специалисту в данной области техники. Такие другие примеры предполагаются охваченными рамками прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАССТАНОВКА СЕЙСМИЧЕСКОГО ОБНАРУЖЕНИЯ, ИМЕЮЩАЯ ИДЕНТИФИЦИРУЕМЫЙ ЭЛЕМЕНТ, И СПОСОБ | 2015 |
|
RU2695295C2 |
| ПОЛУЧЕНИЕ СЕЙСМИЧЕСКИХ ДАННЫХ НА СВЕРХБОЛЬШИХ УДАЛЕНИЯХ ДЛЯ ПОЛНОВОЛНОВОЙ ИНВЕРСИИ ВО ВРЕМЯ НАЗЕМНОГО СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2017 |
|
RU2750092C2 |
| СИСТЕМЫ И СПОСОБЫ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ПОДПОВЕРХНОСТНОЙ ПРОВОДИМОСТИ | 2003 |
|
RU2358293C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2010 |
|
RU2487374C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2013 |
|
RU2570428C2 |
| Комплекс для сейсморазведки в транзитных зонах на основе мультилинейной цифровой кабельной антенны | 2016 |
|
RU2650097C1 |
| ВЫЧИСЛЕНИЕ ДАННЫХ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ГРАДИЕНТА ДАННЫХ ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2014 |
|
RU2733976C2 |
| ПОДВОДНАЯ СИСТЕМА ПЕРЕДАЧИ ДАННЫХ С ВЫСОКОЙ ПРОПУСКНОЙ СПОСОБНОСТЬЮ | 2014 |
|
RU2690031C2 |
| ПОДВОДНАЯ СИСТЕМА ПЕРЕДАЧИ ДАННЫХ С ВЫСОКОЙ ПРОПУСКНОЙ СПОСОБНОСТЬЮ | 2014 |
|
RU2660382C1 |
| МНОГОКОМПОНЕНТНЫЙ АКСЕЛЕРОМЕТР С ОДНОЙ МАССОЙ | 2016 |
|
RU2733974C2 |


Изобретение относится к области геофизики и может быть использовано при проведении морских сейсморазведочных работ. Предложены способ и сенсорное устройство для регистрации сейсмических данных. Сенсорное устройство содержит верхнюю секцию (330) и нижнюю секцию (350), съемно соединенную с верхней секцией (330) посредством соединительного разъема (380). Нижняя секция содержит связывающий материал (356), который высвобождается в грунт после столкновения нижней секции (350) с грунтом. Технический результат – повышение точности получаемых данных за счет обеспечения более тесного контакта датчика с грунтом. 3 н. и 17 з.п. ф-лы, 17 ил.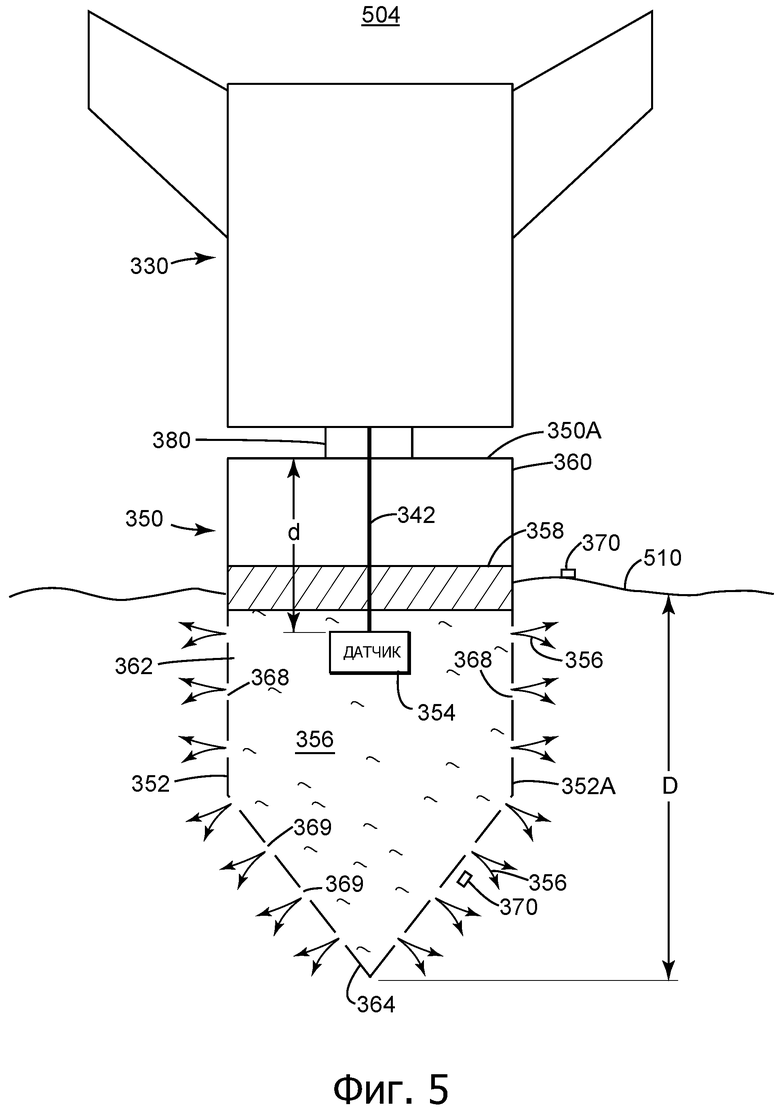
1. Сенсорное устройство (304) для регистрации сейсмических данных, содержащее:
верхнюю секцию (330); и
нижнюю секцию (350), съемно прикрепленную к верхней секции (330) посредством соединительного разъема (380),
при этом нижняя секция содержит связывающий материал (356), который высвобождается в грунт при соударении нижней секции (350) с грунтом.
2. Сенсорное устройство по п. 1, дополнительно содержащее:
механизм (344) управления полетом, прикрепленный к верхней секции, для управления свободным падением на землю.
3. Сенсорное устройство по п. 1, в котором нижняя секция содержит:
корпус (352);
поршень (358), разделяющий корпус (352) на первую и вторую камеры (360, 362) и свободно перемещающийся внутри корпуса;
сейсмический датчик (354), расположенный во второй камере (362); и
связывающий материал (356), находящийся во второй камере (362).
4. Сенсорное устройство по п. 3, в котором корпус имеет проходы (368) в боковых стенках (352А), через которые связывающий материал выходит наружу из корпуса.
5. Сенсорное устройство по п. 4, дополнительно содержащее:
колпачки (370) для закупоривания проходов и удержания связывающего материала во второй камере до приземления на грунт.
6. Сенсорное устройство по п. 3, в котором корпус имеет концевой участок (364), имеющий заостренную форму, для проникновения в грунт.
7. Сенсорное устройство по п. 3, в котором проходы, расположенные ближе к верхней секции, имеют диаметр, отличающийся от диаметра проходов, расположенных дальше от верхней секции.
8. Сенсорное устройство по п. 1, в котором связывающий материал представляет собой гель.
9. Сенсорное устройство по п. 1, в котором связывающий материал находится в первом состоянии, находясь внутри нижней секции, и находится во втором состоянии, отличном от первого состояния, находясь снаружи нижней секции.
10. Сенсорное устройство по п. 1, в котором верхняя секция содержит:
систему (334) позиционирования, предназначенную для определения местоположения сенсорного устройства;
систему (336) связи, предназначенную для связи с машиной поддержки;
механизм (344) управления полетом, предназначенный для управления свободным падением сенсорного устройства;
систему (340) электропитания для снабжения электроэнергией; и
систему (338) обработки данных, выполненную с возможностью поддерживать связь с сейсмическим датчиком, расположенным в нижней секции, и хранить зарегистрированные сейсмические данные.
11. Сенсорное устройство по п. 1, в котором нижняя секция выполнена из биоразлагаемого материала.
12. Система (800) сейсморазведки для регистрации сейсмических данных, содержащая:
сенсорное устройство (804) для измерения сейсмических данных; и
летательный аппарат (802), выполненный с возможностью сброса сенсорного устройства (804) с определенной высоты над целевой позицией,
при этом сенсорное устройство (804) включает в себя:
верхнюю секцию (330) и
нижнюю секцию (350), съемно соединенную с верхней секцией (330) посредством соединительного разъема (380),
причем нижняя секция содержит связывающий материал (356), который высвобождается в грунт при соударении нижней секции (350) с грунтом.
13. Система сейсморазведки по п. 12, в которой нижняя секция включает в себя:
корпус (352);
поршень (358), который делит корпус (352) на первую и вторую камеры (360, 362) и установлен с возможностью свободно перемещаться внутри корпуса;
сейсмический датчик (354), расположенный во второй камере (362); и
связывающий материал (356), находящийся во второй камере (362).
14. Система сейсморазведки по п. 13, в которой корпус имеет проходы (368) в боковых стенках (352А), через которые связывающий материал выходит наружу из корпуса.
15. Система сейсморазведки по п. 4, дополнительно содержащая:
колпачки (370) для закупоривания проходов и удержания связывающего материала во второй камере до приземления на грунт.
16. Система сейсморазведки по п. 12, в которой верхняя секция содержит:
систему позиционирования (334), предназначенную для определения местоположения сенсорного устройства;
систему (336) связи, предназначенную для связи с машиной поддержки;
механизм (344) управления полетом, предназначенный для управления свободным падением сенсорного устройства;
систему (340) электропитания для снабжения электроэнергией; и
систему (338) обработки данных, выполненную с возможностью поддерживать связь с сейсмическим датчиком, расположенным в нижней секции, и хранить зарегистрированные сейсмические данные.
17. Способ сбора сейсмических данных, характеризующийся тем, что:
развертывают (900) летательный аппарат (802), несущий сенсорное устройство (304), над целевой позицией на земле;
сбрасывают (902) сенсорный датчик (304) с определенной высоты над землей; и
высвобождают (904) связывающий материал (356) из сенсорного устройства при соударении с грунтом,
при этом связывающий материал обеспечивает лучшее связывание сейсмического датчика, находящегося внутри сенсорного устройства, с грунтом.
18. Способ по п. 17, в котором дополнительно:
управляют свободным падением сенсорного устройства к целевой позиции.
19. Способ по п. 17, в котором дополнительно:
регистрируют сейсмические данные с помощью сенсорного устройства; и
возвращают верхнюю секцию сенсорного устройства с помощью летательного аппарата, в то время как нижняя секция остается в земле.
20. Способ по п. 17, в котором дополнительно:
выполняют обмен командами между летательным аппаратом и сенсорным устройством в режиме беспроводной связи.
| US 3704764 A, 05.12.1972 | |||
| US 2015053480 A1, 26.02.2015 | |||
| US 2014328144 A1, 06.11.2014 | |||
| СПОСОБ НЕРАЗРУШАЮЩЕГО РЕНТГЕНОВСКОГО КОНТРОЛЯ ТРУБОПРОВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2496106C1 |
| WO 2014057239 A1,17.04.2014 | |||
| US 6951138 B1, 04.10.2005. | |||

