РОДСТВЕННЫЕ ЗАЯВКИ
Настоящая заявка связана с заявкой, заявляет приоритет и полностью включает посредством ссылки ранее поданную предварительную заявку на изобретение США № 62/359720, которая была подана 8 июля 2016 г.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящая заявка относится к области сейсморазведки и измерениям на больших удалениях с использованием наземных узлов.
УРОВЕНЬ ТЕХНИКИ
Следующее описание представлено, чтобы помочь пониманию специалистом в данной области техники, и никоим образом не предназначено для неоправданного ограничения каких-либо пунктов формулы изобретения данного описания или описания в родственной заявке.
Сейсморазведка включает в себя подачу сигнала (например, вибрации или импульса) в Землю так, что происходит отражение и реверберация сигнала при столкновении с различными элементами формации Земли. Датчики используют для обнаружения отражений и ревербераций, которые измеряются и становятся следами и/или данными, которые записывают. Данные могут быть обработаны и иным образом подготовлены и проанализированы, чтобы представить информацию о формации Земли. Эта информация может указывать на наличие или отсутствие различных залежей полезных ископаемых, таких как углеводороды, и других представляющих интерес элементов.
Подаваемый сигнал часто создается большими установками, называемыми наземными вибраторами. Они представляют собой мобильные транспортные средства, которые имеют большую плиту, движущуюся вверх и вниз и ударяющую о землю, создавая вибрационные сигналы, которые распространяются в землю. Естественно, возможны и другие источники, например, взрывчатые заряды.
Сбор сейсмических данных может проводиться на земле посредством размещения датчиков на земле и/или вблизи поверхности земли (даже погруженных или частично погруженных), причем эти датчики либо физически не связаны друг с другом (таким образом, являются узловыми), либо соединены друг с другом кабелями (таким образом, охвачены кабельной сетью). Чаще всего для выполнения разведки больших площадей земли используются датчики, охваченные кабельной сетью и являющиеся экономичными, и это особенно касается широко открытых и чистых областей, таких как области на Ближнем Востоке и в аналогичных областях. Безусловно, узловые датчики могут быть использованы целиком или частично. Узловые датчики могут осуществлять беспроводную связь с центральной записывающей станцией для передачи информации о контроле качества и/или сейсмической информации. Данные также могут храниться в узлах для последующего удаления. Области разведки могут быть разных размеров, но часто имеют размеры порядка квадратных километров, и могут содержать сотни тысяч отдельных датчиков.
Полноволновая инверсия (Full waveform inversion, FWI) представляет собой способ сейсмической инверсии, который можно использовать для получения модели Земли по сейсмическим данным. Технология FWI может обеспечить инверсию скоростей (Vp) продольных волн и некоторых анизотропных параметров, таких как параметры Томпсона (эпсилон и дельта). Данные на больших удалениях (например, более 15 км) или данные на сверхбольших удалениях (например, более 20 км) и очень низкие частоты (например, меньше, чем 3 Гц) могут быть использованы при FWI для выработки пригодных моделей скорости.
Получение сейсмических данных на больших и сверхбольших удалениях может быть проблематичным на суше из-за расстояния от области разведки, на которой должны быть установлены датчики. Например, даже если зона разведки свободная и чистая, не гарантируется, что окружающая территория в нескольких километрах такая же свободная и чистая.
С учетом этих проблем в настоящем описании представлены иллюстративные варианты реализации, которые раскрыты в настоящем документе, для решения некоторых из этих проблем.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Следующее раскрытие различных комбинаций воплощенных признаков в настоящем описании предназначено, чтобы помочь пониманию специалистом в данной области техники, и никоим образом не предназначено для неоправданного ограничения толкования объема формулы изобретения, изложенной в настоящем документе, или любых других пунктов формулы изобретения в родственной заявке.
Настоящее описание включает в себя способ выполнения наземной сейсмической разведки, включающий размещение множества сейсмических приемников в области, которая образует область приемников, размещение множества источников в области, которая образует область источников, и размещение дополнительных приемников за пределами области приемников и источников на расстоянии, которое определяет требуемое большое удаление. Эти приемники (узлы), расположенные на требуемом большом расстоянии от области источников, называют узлами с большим удалением (long offset nodes, LON).
Во время сейсморазведки может быть использовано несколько областей приемников и областей источников, чтобы охватить область разведки. LON будут размещены вокруг каждой области источников и приемников на одинаковом расстоянии, чтобы поддерживать постоянное большое удаление во время разведки. Могут быть допущены небольшие отклонения от желаемого максимального удаления, чтобы приспособиться к препятствию и ограниченным областям.
Настоящее описание также содержит систему наземной сейсмической разведки с большим удалением, имеющую ряд сейсмических датчиков в пределах области, образующих, таким образом, область сенсорных приемников, ряд сейсмических датчиков с большим удалением за пределами области приемников, тем самым окружающих область приемников и образующих область датчиков с большим удалением, при этом область между областью датчиков с большим удалением и областью приемников образует между ними область, которая не содержит сейсмических датчиков, а также которая определяет расстояние большого удаления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Следующее краткое описание графических материалов служит для помощи в понимании специалистом в данной области техники при рассмотрении настоящего описания, и никоим образом не предназначено для неоправданного ограничения или влияния на формулу изобретения в настоящем описании или других последующих родственных описаниях.
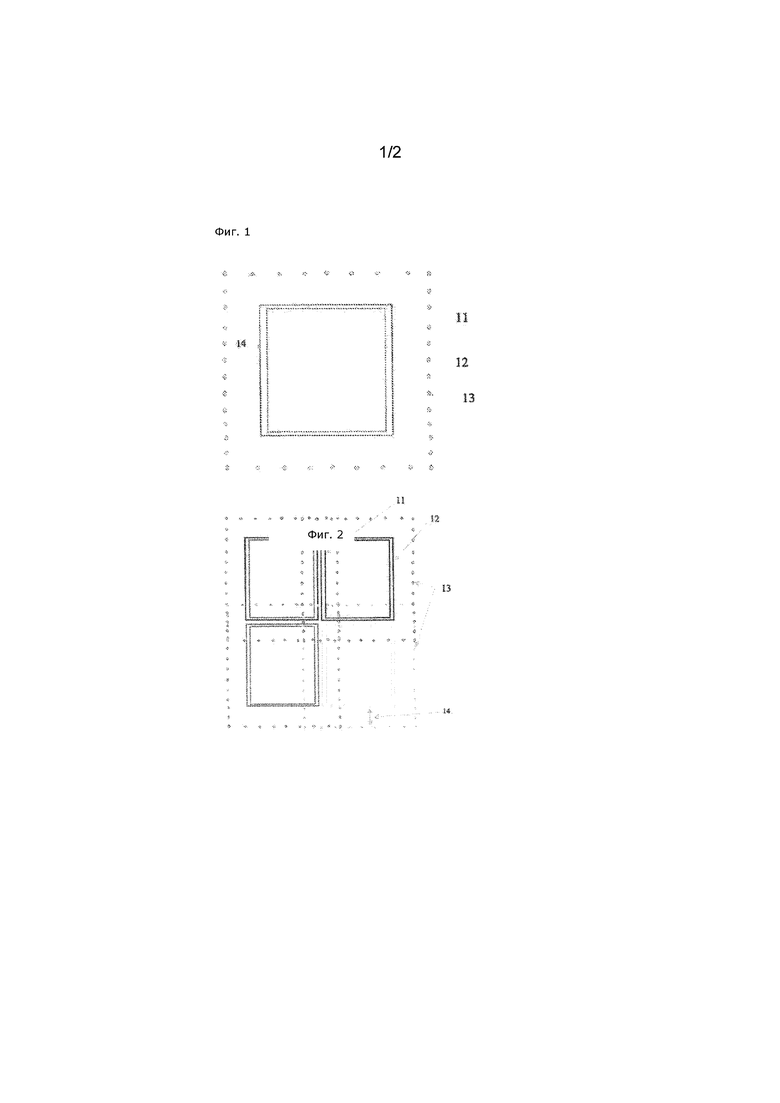
На фиг. 1 представлен схематичный вид сверху области сейсмических датчиков и области источников с LON вокруг области.
На фиг. 2 представлен схематичный вид сверху множества областей источников и приемников с LON вокруг каждой области источников и приемников.
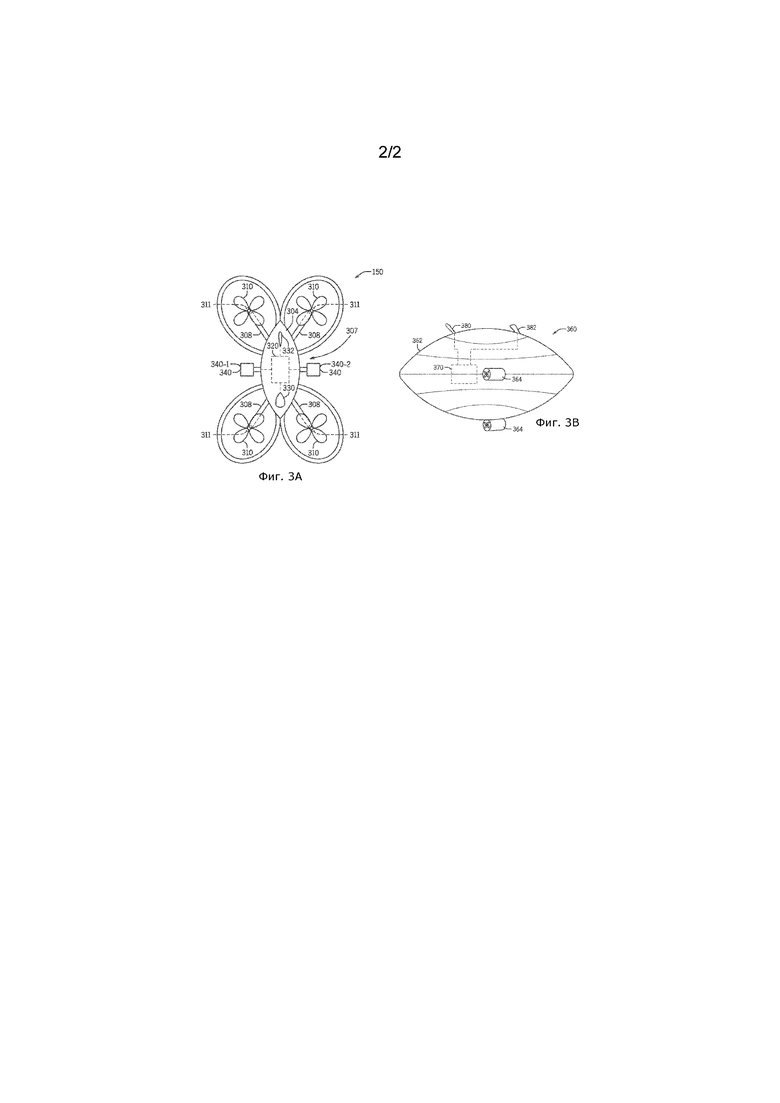
На фиг. 3A представлен схематический вид беспилотного летательного аппарата для распределения датчиков и использования в связи с сейсмической разведкой LON.
На фиг. 3B представлен схематический вид беспилотного летательного аппарата для распределения и использования в связи с сейсмической разведкой LON.
ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Следующее описание предназначено для помощи пониманию специалистом в данной области техники, в отношении различных комбинаций реализованных признаков, описанных в настоящем описании, но никоим образом не предназначено для неоправданного ограничения формулы изобретения в настоящем описании или любых других описаниях родственных заявок.
Полноволновая инверсия (FWI) представляет собой способ сейсмической инверсии, используемый для получения модели земли по сейсмическим данным. Технология FWI позволяет инвертировать скорости (Vp) продольных волн, скорости (Vs) поперечных волн, плотность (rho) и некоторые анизотропные параметры, например параметры Томпсона (эпсилон и дельта). Данные на больших удалениях (более 10 км) или данные на сверхбольших удалениях (более 15 км) могут быть использованы для FWI, для создания точных моделей скорости с меньшим ограничением по исходной модели скорости и по низкочастотному спектру. Получение сейсмических данных на большом удалении может быть дорогим, так как для него требуются очень большие области съемки вокруг области приемников. В различных вариантах реализации в настоящем описании использованы наземные узлы, которые записывают сейсмические данные во время традиционного наземного сбора данных. Наземная разведка может быть выполнена посредством кабельной сети или посредством системы узлов. Чтобы различать обычные узлы, которые являются частью системы приемников, и узлы, используемые для получения данных на большом удалении, в данном документе узлы, используемые для получения данных на большом удалении, называются узлами с большим удалением (LON) или иногда сейсмическими датчиками и/или приемниками с большим удалением.
Количество LON (уменьшенное по сравнению с датчиками в области приемников) может быть установлено рядом с областью съемки и/или вокруг нее, или в ее окружении, на необходимых минимальных расстояниях удаления, как показано на фиг. 1, и они записывают полученные снимки. После получения данных одной области съемки, LON может быть поднят и перемещен в местоположение второй области съемки, и установлен с необходимыми минимальными удалениями, как показано на фиг. 2.
На фиг.1 показаны узлы 13 с большим удалением (LON), установленные вокруг области 12 съемки с требуемым минимальным удалением 14. Внутри области 12 съемки находится область 11 приемников, которая образована сейсмическими датчиками (приемниками), размещенными в этой области. На фиг. 1 области показаны как прямоугольные, но возможны другие формы, такие как квадратные, круглые, овальные или другие формы.
На фиг. 2 схематически показаны четыре схемы сборов данных, как описано на фиг. 1. Узлы 13 с большим удалением (LON) установлены вокруг каждой области 12 съемки с требуемым минимальным удалением 14. На фиг. 2 показаны четыре последовательные схемы сбора данных с областями 12 съемки, областями 11 приемников и связанными с ними узлами 13 с большим удалением. На практике после выполнения одной разведочной операции, область 11 приемников, область 12 съемки и LON 13 перемещают в соседнее положение из предыдущего места сбора данных, и выполняют другой сбор данных.
Для определения местоположения и количества LON 13, необходимых для выполнения сбора данных, может использоваться или создаваться следующая информация или ее комбинации: создание трехмерной модели скорости и модели плотности с использованием доступной информации, включая существующие сейсмические данные, данные VSP (vertical seismic profiling, вертикальное сейсмическое профилирование) и каротажные данные, информацию о целевых горизонтах в области (мелкие и глубокие горизонты), информацию о местоположении для предполагаемого наземного сбора данных; информацию о трехмерной трассировке лучей, освещение целевых горизонтов для различных диапазонов удалений, трехмерное моделирование конечной разности с использованием всех снимков и оптимального местоположения LON 13, полученного при трассировке лучей, при этом для сокращения времени вычислений для трехмерного моделирования конечной разности используют взаимодействие при моделировании (собирает общий приемник), и FWI на общем приемнике собирает данные и определяет, предоставляет ли большое и сверхбольшое удаление информацию, необходимую для получения точной модели скорости.
Количество LON должно быть достаточно большим для обеспечения того, что данные с большим удалением могут создавать хорошую модель скорости и хорошее изображение подповерхностного слоя. Количество LON определяется на основе сейсмического моделирования, как было описано выше.
Размещение LON 13 вызывает озабоченность. Может существовать случай, когда область разведки свободна и не содержит препятствий и/или легко доступна. Однако окружающая область может не иметь этой особенности. Это может быть место, где измеряют поле, но окружающая область - это лес или другой сложный ландшафт. Или место, в котором область разведки окружена пригородными зонами, в которых прокладка кабельных систем не осуществима, и даже хождение или въезд в эти зоны не осуществимы.
Настоящее описание раскрывает комбинацию элементов, в которой LON (узлы, которые размещены вне области разведки в положении с большим удалением) доставляют в места с большим удалением посредством автономных летательных систем, иногда называемых беспилотными летательными аппаратами. В одном таком варианте реализации беспилотный летательный аппарат может иметь пропеллеры, которые поднимают летательное устройство, и сейсмический датчик либо переносится посредством летательного устройства, либо закрепляется в нем. Полезная конструкция транспортного средства показана и описана в принадлежащей тому же заявителю публикации патентной заявки № US 2014-0078865, под названием «Seismic Acquisition System-Based Unmanned Airborne Vehicle», на которую дана ссылка в настоящем документе, и которая в полном объеме включена в качестве ссылки для обеспечения поддержки раскрытия в настоящем описании.
В соответствии с вариантами реализации настоящей заявки, узлы 13 LON могут быть встроены или могут быть беспилотными летательными аппаратами, которые перемещаются из исходного местоположения в положения большого удаления, так что область вблизи указанных положений большого удаления не должна пересекаться людьми-операторами пешком или на машине. Беспилотные летательные аппараты с датчиками приземляются на землю, при этом размещая датчик на земле, обнаруживают сигналы, а затем датчики перемещаются из мест большого удаления. Беспилотные летательные аппараты также могут сбрасывать с транспортного средства LON, которые соударяются с поверхностью Земли и закрепляются на ней.
Как показано на фиг. 3A, беспилотный летательный аппарат 150 может содержать множество пропеллеров 310, которые приводятся в движение соответствующими двигателями 311 (например, электродвигателями) транспортного средства 150 с целью управления вертикальным подъемом и/или боковым перемещением транспортного средства 150. В общем, беспилотный летательный аппарат 150 может содержать корпус 307 и выступающие части 308 корпуса 307 для установки двигателей 311 и пропеллеров 310, как показано на фиг. 3A. Беспилотный летательный аппарат 150 может дополнительно содержать управляющую электронику 320, которая может, например, автономно управлять направлением транспортного средства 150 по заранее определенной траектории полета; выполнять сбор данных от сейсмического датчика; получать данные от сейсмического датчика; выполнять беспроводную передачу данных к транспортному средству 150 и от него, например беспроводную передачу данных к транспортному средству 150 и от него с использованием Wi-Fi связи; управлять захватом видео или неподвижных изображений с использованием камер 340 высокой четкости (high definition, HD), например, двух HD камер 340-1 и 340-2, и связанных с ними двигателей; и т. п. Как показано на фиг. 3А, управляющая электроника 230 может быть соединена с антенной 330 GNSS (Global Navigation Satellite System, глобальная система спутниковой навигации) для целей приема сигнала GNSS, который кодируется с данными, указывающими местоположение транспортного средства, а также с антенной 332 Wi-Fi для Wi-Fi связи.
В соответствии с примерами вариантов реализации, беспилотный летательный аппарат 150 может быть транспортным средством, аналогичным AR Drone, поставляемым компанией ParrotTM.
Беспилотный летательный аппарат может принимать другие формы в соответствии с дополнительными вариантами реализации. Например, на фиг. 3В изображен беспилотный летательный аппарат 360, который достигает вертикального подъема, используя плавучесть, достигаемую благодаря газу, который легче воздуха, хранящемуся внутри корпуса 362 транспортного средства 362. В связи с этим корпус 362 может содержать камеру или баллон, наполненный гелием, в соответствии с примером варианта реализации. В общем, боковое маневрирование беспилотного летательного аппарата 360, а также контролируемое вертикальное позиционирование может быть достигнуто с использованием, например, движителей 364 на основе пропеллеров (например, распределенных ниже и по обеим сторонам корпуса 362) и крыльев/рулей направления (не показаны), которыми управляет управляющая электроника 370 транспортного средства 360. Подобно беспилотному летательному транспортному средству 150, показанному на фиг. 3А, управляющая электроника 370 может управлять работой беспилотного летательного аппарата 360 и его связью. Среди других элементов, как показано на фиг. 3B, беспилотный летательный аппарат 360 может содержать антенну 380 GNSS, а также антенну 382 Wi-Fi.
Предшествующее описание охватывает не исчерпывающее количество комбинаций вариантов реализации, находящихся в рамках настоящего описания, и, с учетом этого, не предназначено для неоправданного ограничения объема пунктов формулы в данном описании или других последующих и родственных пунктах формулы в описаниях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЛЯ СВЯЗЫВАНИЯ СЕЙСМИЧЕСКОГО ДАТЧИКА С ГРУНТОМ | 2015 |
|
RU2662048C1 |
| СПОСОБ ПОЛУЧЕНИЯ МАССИВА СЕЙСМИЧЕСКИХ ДАННЫХ НА ИССЛЕДУЕМОМ УЧАСТКЕ | 2018 |
|
RU2738594C1 |
| СПОСОБ СБОРА МАССИВА СЕЙСМИЧЕСКИХ ДАННЫХ НА ИССЛЕДУЕМОМ УЧАСТКЕ И СООТВЕТСТВУЮЩАЯ СИСТЕМА | 2018 |
|
RU2738592C1 |
| СПОСОБ ПРОВЕДЕНИЯ СБОРА СЕЙСМОРАЗВЕДОЧНЫХ ДАННЫХ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНЫХ ВОЗДУШНЫХ СРЕДСТВ | 2022 |
|
RU2799624C1 |
| МНОГОПАРАМЕТРИЧЕСКАЯ ИНВЕРСИЯ ЧЕРЕЗ ЗАВИСЯЩУЮ ОТ СДВИГА УПРУГУЮ ПОЛНОВОЛНОВУЮ ИНВЕРСИЮ (FWI) | 2014 |
|
RU2615591C1 |
| СПОСОБ ВЫБОРА ПАРАМЕТРОВ ДИНАМИЧЕСКИХ ИСТОЧНИКОВ ДЛЯ ПОЛУЧЕНИЯ ДАННЫХ СЕЙСМИЧЕСКИХ ВИБРАТОРОВ | 2008 |
|
RU2450291C2 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| УСТРОЙСТВО И СПОСОБ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ, СИСТЕМА СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2004 |
|
RU2450255C2 |
| СЕЙСМИЧЕСКАЯ РАЗВЕДКА | 2006 |
|
RU2396578C2 |
| СИСТЕМА И СПОСОБ СБОРА СЕЙСМИЧЕСКИХ ДАННЫХ | 2010 |
|
RU2523734C2 |
Изобретение относится к области сейсморазведки и измерения на больших удалениях с использованием наземных узлов. Предложена система наземной сейсмической съемки с большим удалением, содержащая множество датчиков в пределах области, образующей, таким образом, область сенсорных приемников, множество источников, образующих область источников, множество сенсорных приемников с большим удалением за пределами областей приемников и источников, тем самым окружающих области приемников и источников, и образующих область датчиков с большим удалением, которая не содержит сенсорных приемников, которая также определяет расстояние, отделяющее внешнюю границу области сенсорных приемников. Технический результат - повышение информативности сейсморазведочных мероприятий за счет получения сейсмических данных на больших и сверхбольших удалениях. 2 н. и 13 з.п. ф-лы, 3 ил.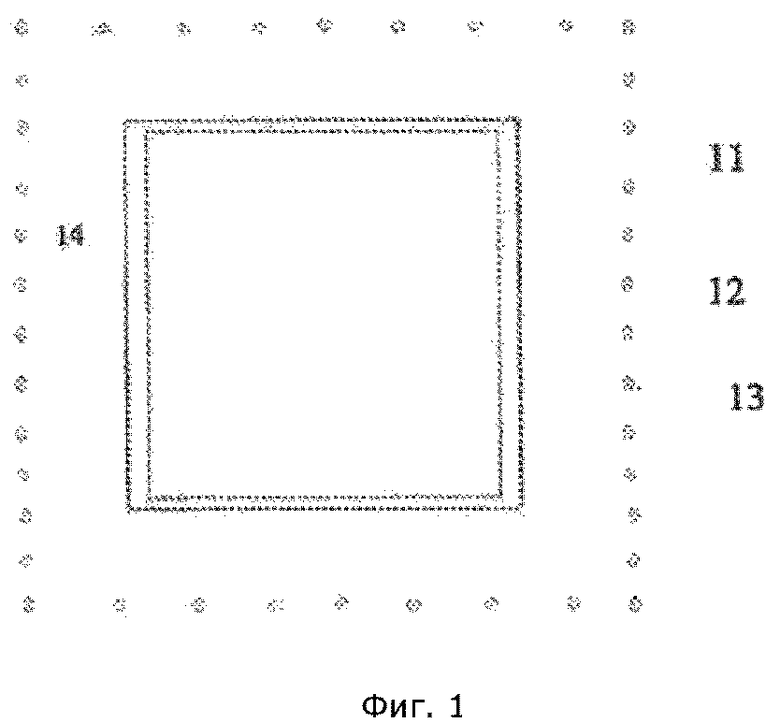
1. Способ выполнения наземной сейсмической разведки, включающий в себя этапы, на которых:
размещают множество сейсмических сенсорных приемников по периметру области, тем самым образуя область сейсмических сенсорных приемников;
определяют множество точек сейсмических источников за пределами периметра, тем самым образуя область сейсмических источников;
размещают множество сейсмических датчиков с большим удалением (LON) за пределами области приемников и области источников на требуемом расстоянии большого удаления.
2. Способ по п. 1, в котором расстояние большого удаления составляет по меньшей мере 10 км от каждого из множества LON до области источников.
3. Способ по п. 1, в котором расстояние большого удаления составляет по меньшей мере 15 км от каждого из множества LON до области источников.
4. Способ по п. 1, в котором расстояние большого удаления составляет по меньшей мере 20 км от каждого из множества LON до области источников.
5. Способ по п. 1, включающий в себя этапы, на которых осуществляют:
активацию сейсмического источника в области сейсмических источников для выработки сигнала сейсмического источника,
прием и запись отражений и ревербераций сигнала указанного источника посредством по меньшей мере одного их множества LON,
выполнение полноволновой инверсии на общем приемнике для сбора данных,
определение того, предоставляет ли множество LON информацию, необходимую для получения точной модели скорости, и
на основании результатов полноволновой инверсии, определение того, являются ли местоположения множества LON относительно местоположения области источников пригодными для полноволновой инверсии.
6. Способ по п. 2, включающий в себя этап, на котором располагают множество LON посредством беспилотных летательных аппаратов.
7. Способ по п. 6, в котором каждый из беспилотных летательных аппаратов соединен с соответствующим LON из множества LON, который располагают посредством приземления беспилотных летательных аппаратов на поверхность Земли, тем самым соединяя соответствующий LON к поверхности Земли.
8. Способ по п. 6, в котором каждый из беспилотных летательных аппаратов соединен с соответствующим LON из множества LON, который располагают посредством сбрасывания соответствующего LON в поверхность Земли.
9. Способ по п. 1, в котором множество LON определяют на основе сейсмического моделирования с использованием моделирования полной конечной разности для выработки синтетических данных и проведения полноволновой инверсии.
10. Система наземной сейсмической разведки с большим удалением, содержащая:
множество сейсмических сенсорных приемников, расположенных по периметру области, тем самым образующих область сейсмических сенсорных приемников;
множество сейсмических источников за пределами периметра, тем самым окружающих область сейсмических сенсорных приемников и образующих область источников;
множество сейсмических датчиков с большим удалением (LON) за пределами области источников, тем самым окружающих область сейсмических сенсорных приемников и область источников и образующих область датчиков с большим удалением, при этом область между областью датчиков с большим удалением и областью приемников свободна от сейсмических датчиков и также определяет расстояние большого удаления.
11. Система наземной сейсмической разведки с большим удалением по п. 10, в которой расстояние большого удаления составляет по меньшей мере 10 км, без сейсмических сенсорных приемников от области приемников или сейсмических датчиков с большим удалением, находящихся в пересекаемой области, определяющей расстояние большого удаления.
12. Система наземной сейсмической разведки с большим удалением по п. 10, в которой сейсмические датчики с большим удалением выполнены с возможностью подключения к беспилотному летательному аппарату.
13. Система наземной сейсмической разведки с большим удалением по п. 10, в которой расстояние большого удаления составляет по меньшей мере 15 км, без сейсмических сенсорных приемников от области приемников или сейсмических датчиков с большим удалением, находящихся в пересекаемой области, определяющей расстояние большого удаления.
14. Система наземной сейсмической разведки с большим удалением по п. 10, в которой расстояние большого удаления составляет по меньшей мере 20 км, без сейсмических сенсорных приемников от области приемников или сейсмических датчиков с большим удалением, находящихся в пересекаемой области, и определяющей расстояние большого удаления.
15. Система наземной сейсмической разведки с большим удалением по п. 10, содержащая контроллер, выполненный с возможностью:
активации по меньшей мере одного сейсмического источника из множества сейсмических источников для выработки сигнала сейсмического источника,
приема отражений и ревербераций сигнала сейсмического источника посредством по меньшей мере одного их множества LON,
выполнения полноволновой инверсии на общем приемнике для сбора данных,
определения того, предоставляет ли множество LON информацию, необходимую для получения точной модели скорости, и
на основании результатов полноволновой инверсии, определения того, являются ли местоположения множества LON относительно местоположения области источников пригодными для полноволновой инверсии.
| WO 2016064845 A1, 28.04.2016 | |||
| Rene‐Edouard Plessix, "Full waveform inversion and distance separated simultaneous sweeping: a study with a land seismic data set", Geophysical Prospecting, Volume 60, Issue 4 - Simultaneous Source Methods for Seismic Data, Jun 2012, p | |||
| ПРИБОР ДЛЯ СЪЕМКИ СЛОЖНЫХ ПРОФИЛЕЙ, ПРЕИМУЩЕСТВЕННО ГРЕБНЫХ ВОЗДУШНЫХ И ВОДЯНЫХ ВИНТОВ | 1922 |
|
SU733A1 |
| US 20140078865 A1, 20.03.2014 | |||
| WO 2015195939 A1, 23.12.2015 | |||
| US | |||

