Предлагаемое изобретение относится к области измерений с поверхности земли длин линейной части подземного трубопровода и может быть использовано предприятиями нефтегазовой отрасли России при определении вместимости магистральных, и технологических трубопроводов для установления объемов нефтепродукта, находящихся в них, при выполнении работ по инвентаризации, и оперативному контролю количества перекачиваемых нефтепродуктов.
Известен способ и устройство диагностики технического состояния подземного трубопровода, который включает непрерывное измерение градиентов индукции постоянного магнитного поля, по меньшей мере, в восьми точках около трубного пространства при перемещении, по меньшей мере, трех линеек датчиков, причем две линейки датчиков располагаются вертикально, а одна горизонтально относительно поверхности Земли, каждая из линеек состоит из трех трехкомпонентных датчиков, математическую обработку измерений путем решения избыточной системы уравнений, составленной для градиентов индукции постоянного магнитного поля, определение пространственной траектории трубопровода на основе зависимости величин градиентов от глубины погружения трубопровода и от расстояния между линейкой датчиков и проекцией оси трубопровода, проведение выявления дефектов и их ранжирования на основе рассчитанных геометрических параметров и компонент магнитных моментов дефектов и градиентов моментов вдоль оси. Для реализации способа предлагается устройство, которое включает полевой компьютер, блок сбора данных и управления, три линейки магниторезистивных датчиков постоянного магнитного поля, причем две линейки расположены вертикально, а одна горизонтально относительно поверхности Земли, каждая из линеек состоит из трех трехкомпонентных датчиков, выходы которых соединены со входами соответствующих операционных усилителей каждой компоненты, тогда как выходы операционных усилителей связаны со входами соответствующих сигнализаторов перегрузок и генератором перемагничивания, причем выходы сигнализаторов перегрузок соединены со входами соответствующих аналого-цифровых преобразователей, выходы которых подсоединены к блоку сбора данных и управления [1].
Недостатками данного способа и устройства по его реализации являются:
требуется предварительная трассировка местоположения проекции трубопровода на землю с использованием трассопоисковых приборов, что приводит к увеличению трудоемкости процесса измерения длины подземного трубопровода;
высокая погрешность измерения длины подземного трубопровода при расположении рядом соседних коммуникаций с током;
невозможность проводить измерение длины подземного трубопровода на технологических площадках, на которых имеется плотная сетка расположения трубопроводов с током, из-за высокой погрешности в измерениях.
отсутствие в устройстве технического решения по позиционированию магнитной антенны устройства над осью трубопровода;
отсутствие в способе технических решений, обеспечивающих высокоточное координирование на местности в глобальной системе координат местоположения магнитной антенны устройства, что приводит к большой погрешности в измерении длины подземного трубопровода;
Отсутствие в способе и устройстве технических решений, устраняющих негативное влияние вышеуказанных факторов, приводит к снижению его заявленных точностных характеристик, и делает невозможным его применения при измерении длин подземного трубопровода на технологических площадках с плотной сеткой расположения трубопроводов из-за высокой погрешности измерения.
Известен способ и устройство диагностики технического состояния подземного трубопровода [2]. Способ диагностики включает возбуждение в зоне трубопровода переменного магнитного и переменного электрического поля, измерение расстояния от датчиков до проекции оси трубопровода на дневную поверхность, индицирование величины и направления удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода, а при диагностировании, идентификации и ранжировании аномалий внесение поправок в величины компонент поля и их разностей, связанных с расстоянием от датчиков до оси трубопровода, определение углов поворота датчиков поля вокруг горизонтальных и вертикальной оси, получение матрицы поправок и внесение их в матрицы компонент поля и их разностей, измерение индукции постоянного магнитного поля не менее чем в шести точках пространства над трубопроводом и не менее девяти разностей величин индукции постоянного магнитного поля в этих же точках, одновременно с индукцией постоянного магнитного поля проводят измерение не менее двух компонент вектора индукции переменного магнитного поля, по крайней мере, в трех точках пространства над трубопроводом, расположенных вдоль горизонтальной или вертикальной оси и совпадающих с точками измерения постоянного магнитного поля, и не менее двух компонент вектора напряженности переменного электрического поля, причем датчики постоянного магнитного поля, переменного магнитного поля и переменного электрического поля совмещены в одном конструктиве, проведение предварительной статистической обработки результатов измерений, выделение по совокупности признаков участки трубопровода для последующей обработки, определение расположение и магнитных моментов источников аномалий постоянного и переменного магнитных полей и параметры нарушений изоляции трубопровода и проведение по полученным данным идентификации и ранжирования особенностей технического состояния трубопровода. Устройство диагностики содержит узел датчиков постоянного магнитного поля и узел датчиков переменного магнитного поля, соединенные в объединенный узел датчиков магнитного поля, блок сбора данных и управления (БСДУ), блок преобразователей-акселерометров, блок возбуждения (генератор) электромагнитного поля. Узел датчиков постоянного магнитного поля содержит устройства определения разности значений индукции постоянного магнитного поля, которые соединены с многовходовыми аналого-цифровыми преобразователями (АЦП), соединенные в свою очередь с микроконтроллерами. Микроконтроллеры соединены с адаптерами интерфейса, адаптерами преобразователей из одного интерфейса в другой, разветвителем HUB USB и далее с контроллером БСДУ. Индукционные датчики узла переменного магнитного поля соединены с избирательными переключаемыми усилителями, многоканальным АЦП и через разветвитель с контроллером БСДУ. Блок электрометрической диагностики состоит из воздушной и стелющейся антенн, переключающихся на частоты 100 и 625 Гц избирательных усилителей, соединенных с многоканальным АЦП, соединенным через разветвитель HUB USB с контроллером БСДУ. БСДУ через адаптер USB и микроконтроллер управляет работой автоматических аттенюатеров избирательных усилителей. Бесконтактные антенны за счет их распределенной емкости преобразуют напряженности электрического поля в электрические сигналы. БСДУ состоит из соединенных между собой контроллера, энергонезависимой памяти, клавиатуры и индикатора. Контроллер через USB -порт соединен с персональным компьютером и GPS. Блок возбуждения электромагнитного поля состоит из генератора, согласующего устройства, используемого при возбуждении поля рамкой, и заземляющей электрической линии, один из концов которой соединен с трубопроводом, а другой с заземленным электродом или емкостным заземлителем. Звуковая индикация прохождения оператором над проекцией оси трубопровода на земную поверхность производится с помощью детектора, преобразователя напряжение-частота и головных телефонов.
Недостатками способа и устройства по его реализации являются:
высокая погрешность измерения координат трубопровода на местности используемыми GPS;
невозможность проведения измерения длин подземных трубопроводов на технологических площадках с плотной сеткой расположения трубопроводов с током из-за высокой погрешности в измерениях;
отсутствие в устройстве технических решений, позволяющих выделить (различить) обследуемый трубопровод от соседних трубопроводов, расположенных в непосредственной близости от него - от двух метров и менее;
невысокая скорость оцифровки применяемых АЦП.
Наиболее близким к предлагаемому техническому решению является способ [3]. Способ диагностики технических параметров подземного трубопровода включает: возбуждение двумя генераторами переменного тока, подключенных на концах обследуемого трубопровода, переменного магнитного поля в зоне трубопровода, которые включены навстречу друг другу в режиме противофазы, один из которых является основным и задает базовую ФЧХ переменного тока, а второй вспомогательным и работает в импульсном режиме, составляющий не более 20% от времени работы основного генератора, синхронизирование режимов работы генераторов и устройства по меткам времени GPS, встроенных в генераторы и БСДУ устройства, выделение обследуемого трубопровода из числа трубопроводов, расположенных в непосредственной близости по максимальной величине тока, возбужденного в трубопроводе, а также по фазово-частотной характеристике тока, позиционирование оператора над обследуемым трубопроводом и проведение измерений над и вблизи трубопровода индукции переменного магнитного поля, создаваемой током в трубопроводе, и одновременно с индукцией переменного магнитного поля проводят измерение трех компонентов вектора индукции постоянного магнитного поля над трубопроводом в точках, совпадающих с точками измерения переменного магнитного поля, измерение расстояния от датчиков до проекции оси трубопровода на дневную поверхность, индицирование величины и направления удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода, определение углов поворота датчиков поля вокруг горизонтальных и вертикальной осей трубопровода, получение матрицы поправок, связанных с углами поворота датчиков и их расстоянием относительно оси трубопровода, внесение поправок в матрицы компонент поля и их разностей, обработку результатов измерений и определение технических параметров подземного трубопровода.
Недостатками данного способа являются:
применяемые в способе GPS используются для синхронизации режимов работы генераторов и магнитной антенны устройства по меткам времени GPS. Известно, что точность любой GPS сильно зависит от открытости пространства и высоты используемых спутников над горизонтом, поэтому их точность определения координат составляет примерно 6…8 метров при хорошей видимости спутников и использовании алгоритмов корреляции, что приводит к высокой погрешности измерения длин подземной части трубопроводов;
отсутствуют технические и программные решения, позволяющие обеспечить высокую точность измерения длин линейной подземной части трубопровода.
Задачей изобретения является повышение достоверности и точности измерения длин линейной подземной части (далее ЛПЧ) трубопровода при определении объема продуктов, находящихся в трубопроводе.
Это достигается за счет того, что в способе диагностики технических параметров подземного трубопровода, который включает: возбуждение двумя генераторами переменного тока, подключенных на концах обследуемого трубопровода, переменного магнитного поля в зоне трубопровода, которые включены навстречу друг другу в режиме противофазы, один из которых является основным и задает базовую ФЧХ переменного тока, а второй вспомогательным и работает в импульсном режиме, составляющий не более 20% от времени работы основного генератора, синхронизирование режимов работы генераторов и устройства по меткам времени GPS, встроенным в генераторы и БСДУ устройства, выделение обследуемого трубопровода из числа трубопроводов, расположенных в непосредственной близости по максимальной величине тока, возбужденного в трубопроводе, а также по фазово-частотной характеристике тока, позиционирование оператора над обследуемым трубопроводом и проведение измерений над и вблизи трубопровода индукции переменного магнитного поля, создаваемой током в трубопроводе, и одновременно с индукцией переменного магнитного поля проводят измерение трех компонентов вектора индукции постоянного магнитного поля над трубопроводом в точках, совпадающих с точками измерения переменного магнитного поля, измерение расстояния от датчиков до проекции оси трубопровода на дневную поверхность, индицирование величины и направления удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода, определение углов поворота датчиков поля вокруг горизонтальных и вертикальной осей трубопровода, получение матрицы поправок, связанных с углами поворота датчиков и их расстоянием относительно оси трубопровода, внесение поправок в матрицы компонент поля и их разностей, обработку результатов измерений и определение технических параметров подземного трубопровода, отличающийся тем, что получают массив точек, имеющих GPS координаты сантиметрового диапазона точности, проводят селекцию, где в качестве принадлежности точек к измеренному трубопроводу является критерий равенства угла фазы рабочего тока генератора, из числа оставшихся выбирают точки, имеющие максимальные значения амплитуды рабочего тока генератора и которые принадлежат оси трубопровода, проводят аппроксимацию массива точек аналитической кривой, где в качестве математического инструмента используется метод наименьших квадратов, и рассчитывают коэффициенты трехмерного уравнения координат трубопровода в глобальной системе координат; далее определяют длину подземной части трубопровода по положению его оси в глобальной системе координат, которое сводится к расчету на компьютере длины отрезка, описываемого аналитическим уравнением.
Суть предлагаемого технического решения поясняется следующими фигурами.
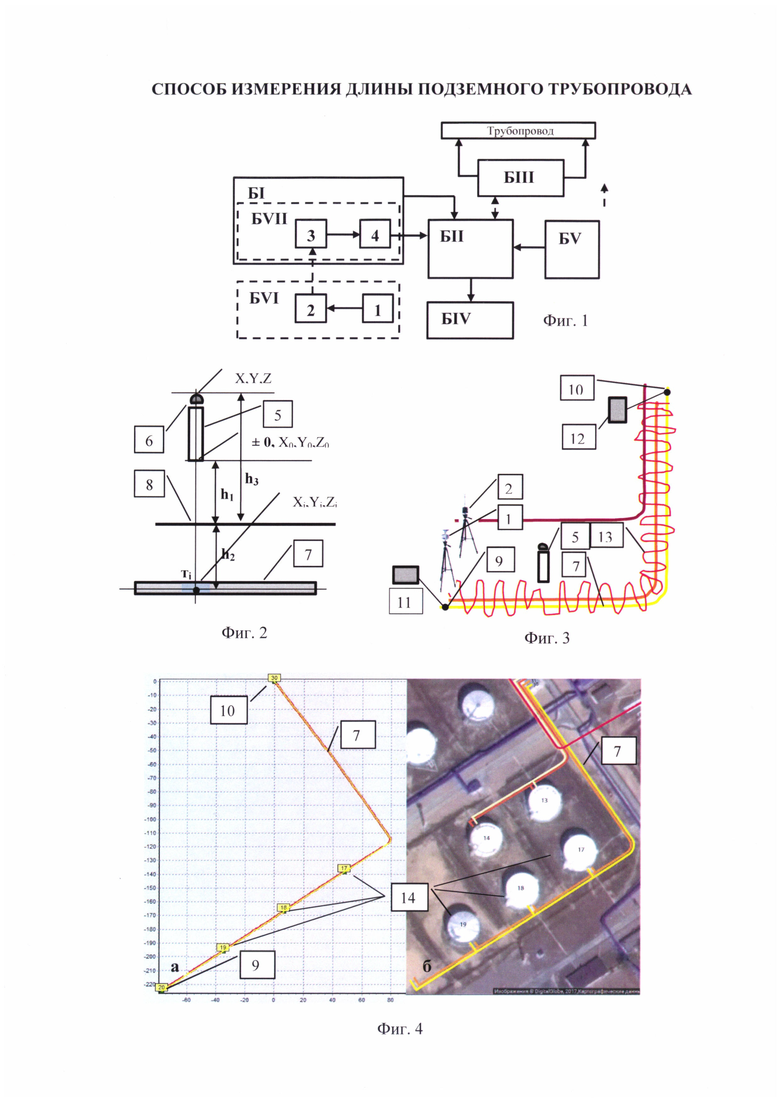
На фиг. 1 представлена блок-схема устройства для измерения длин линейной подземной части трубопровода, где
Б1 - блок датчиков магнитного поля (магнитная антенна),
БII - блок сбора данных и управления (БСДУ),
БIII - блок возбуждения и синхронизации электромагнитного поля,
БIV - блок индикации и отображения,
БV - блок периферийных устройств.
БVI - Блок стационарного модуля спутниковой навигационной системы, содержащий:
1 - базовая станция СНС,
2 - радиомодем базовой станции СНС
BVII - блок мобильного модуля спутниковой навигационной системы, содержащий:
3 - радиомодем мобильной станции СНС,
4 - мобильная станция СНС (ровер).
На фиг. 2 представлена схема положения магнитной антенны устройства и оси трубопровода в глобальной системе координат, где:
5 - магнитная антенна устройства,
6 - антенна GPS мобильного модуля СНС,
7 - трубопровод,
8 - поверхность земли.
На фиг. 3 представлена схема перемещения магнитной антенны устройства над трубопроводом при проведении измерения его длины, где
9 - начальная точка измерения трубопровода,
10 - конечная точка измерения трубопровода,
11 - основной генератор устройства,
12 - вспомогательный генератор устройства,
13 - маршрут перемещения магнитной антенны устройства при выполнении измерения длины трубопровода.
На фиг. 4 представлен пример оформления результатов измерения ЛПЧ трубопровода на технологической площадке (фиг. 3); а - кривая второго порядка, полученная после обработки результатов измерения длины ЛПЧ трубопровода с использованием предлагаемых технических решений, и построенная в горизонтальной плоскости в глобальной системе координат; б - кривая второго порядка (трек измеренного трубопровода), нанесенный на карту местности, где:
14 - координаты отводов к внешним объектам трубопровода.
Предлагаемый способ измерения длины подземного трубопровода реализуется с использованием устройства, фиг. 1, которое работает следующим образом:
Блок возбуждения и синхронизации электромагнитного поля БIII возбуждает в трубопроводе переменный ток с заданной фазово-частотной характеристикой (ФЧХ), режимы работы генераторов блока БIII и БСДУ БII синхронизируются по меткам времени GPS.
Блок датчиков магнитного поля (магнитная антенна) БI направляет в БСДУ сигналы с датчиков, где они усиливаются, преобразуются в цифровой код и обрабатываются по заданной программе. С блока периферийных устройств БV в БСДУ поступают поправки от гироскопов, связанные угловыми отклонениями датчиков магнитной антенны 5 и антенны ровера 6.
Измерение координат на местности с сантиметровой точностью обеспечивается использованием в устройстве дифференциального режима работы СНС: БVI и БVII В BVI входят: стационарная базовая станция СНС 1 и ее радиомодем 2, которые устанавливаются у начальной точки измерения длины трубопровода. В БVII, который расположен в блоке магнитной антенны БI, входят: мобильная станция СНС 3 и ее радиомодем 4. Поправки от базовой станции 1 с помощью радиомодема 2 передаются на радиомодем 3 и поступают на ровер 4. Координаты с учетов полученных поправок от базовой станции 2 передаются от ровера 4 в БСДУ устройства.
Данные о трубопроводе накапливаются и хранятся в энергонезависимой памяти БСДУ. Управление устройством и блоком БIII осуществляется с помощью персонального компьютера блока индикации и отображения BIV.
На фиг. 2 показано положение магнитной антенны 5 устройства при выполнении измерения длин ЛПЧ трубопровода в глобальной системе координат, где: X, Y и Z - координаты антенны GPS ровера 6 в глобальной системе координат, которые обеспечиваются дифференциальными поправками от базовой станции СНС 1; 5 - магнитная антенна устройства; ±0, X0, Y0, Z0 - нулевая отметка магнитной антенны (локальная система координат) и ее координаты антенны GPS ровера 6 в глобальной системе координат; h1 - базовая длина от начала локальной системы координат (далее ЛСК) до поверхности земли 8; h2 - глубина заложения трубопровода 7; h3 - расстояние от поверхности земли до антенны ровера. Координаты ЛСК локальной системы координат определяются: X=Х0; Y=Y0; Z0=Z-(h3-h1). Планово-высотная отметка i-ой точки на оси трубопровода относительно локальной системы координат определяется: Хi=Х0; Yi=Y0; Zi=Z0-(h1+h2).
Сущность изобретения сводится к реализации возможности проведения измерения длины линейной подземной части трубопровода в условиях, когда он расположен на технологической площадке, где в непосредственной близости от него (до одного метра) расположены другие трубопроводы, которые создают помехи при выделении трубопровода и проведении измерений его длины.
На фиг. 3 приведен пример измерения длины линейной подземной части отдельного трубопровода 7 на технологической площадке (фиг. 4б), который состоит в следующем:
генераторы 11 и 12 подключаются в начале 9 и конце 10 измеряемого участка трубопровода 7, параметры работы генераторов и БСДУ устройства синхронизируются по времени с помощью GPS. Базовая станция СНС 1 и ее радиомодем 2 устанавливаются у начальной точки 9 измерения длины ЛПЧ трубопровода;
оператор с устройством на спине перемещается 13 в пешем порядке от начальной точки измерения 9 к конечной 10, позиционируя положение магнитной антенны 5 устройства относительно проекции оси измеряемого трубопровода 7 на поверхности земли 8 по интерфейсу персонального компьютера устройства;
в период работы обоих генераторов 11 и 12 обеспечивается выделение обследуемого трубопровода на фоне помех от соседних трубопроводов за счет создания большой суммарной величины тока в измеряемом трубопроводе 7, а также по углу фазы рабочего тока генератора;
по завершению измерения ЛПЧ трубопровода 7 в БСДУ устройства будет сформирован большой массив точек, принадлежащих измеренному трубопроводу 7, где каждая точка массива имеет следующие данные: высокоточные координаты в географической системе; глубина фактического заложения трубопровода; величину и угол фазы рабочего тока генератора 11;
алгоритм расчета длин трубопровода по результатам его измерения сводится к следующему: вначале осуществляется селекция точек, где в качестве принадлежности их к измеренному трубопроводу является критерий равенства угла фазы рабочего тока генератора 11; из числа оставшихся точек выбираются точки, которые имеют максимальное значение амплитуды рабочего тока генератора и принадлежат оси трубопровода. Далее проводится аппроксимация массива точек аналитической кривой, где в качестве математического инструмента используется метод наименьших квадратов, и рассчитываются коэффициенты трехмерного уравнения координат трубопровода в глобальной системе координат;
определение длины подземной части трубопровода по положению его оси в глобальной системе координат (фиг. 2) сводится к расчету на компьютере длины отрезка, описываемого аналитическим уравнением.
Предлагаемый способ позволяет выполнить измерения длин линейной подземной части магистрального трубопровода, расположенного в сложных трассовых условиях, или технологического трубопровода на технологической площадке, с требуемой точностью [4], которая необходима для определения объема нефтепродуктов, находящихся в них.
Источники информации
1. Патент РФ №2510500.
2. Патент РФ №2453760.
3. Патент РФ №2 634 755 - прототип.
4. МИ 2801-2003. Методика выполнения измерений геометрическим методом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения пространственного положения трубопровода на участке подводного перехода | 2021 |
|
RU2786847C2 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2634755C2 |
| Способ определения координат планово-высотного положения оси подземного трубопровода | 2020 |
|
RU2743605C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2024 |
|
RU2837559C1 |
| Способ диагностики технических параметров подземного трубопровода | 2020 |
|
RU2735349C1 |
| СПОСОБ ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2633018C2 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2024 |
|
RU2824417C1 |
| Способ обнаружения несанкционированных врезок в трубопровод и устройство для его реализации | 2020 |
|
RU2751271C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2022 |
|
RU2789039C1 |
| Способ обнаружения несанкционированных врезок в подземный трубопровод | 2020 |
|
RU2741177C1 |
Изобретение относится к области измерений с поверхности земли длин линейной части подземного трубопровода. Сущность изобретения заключается в том, что получают массив точек, имеющих GPS координаты сантиметрового диапазона точности, проводят селекции массива точек по критерию равенства угла фазы рабочего тока генератора, осуществляют выборку точек из числа оставшихся, имеющих максимальные значения амплитуды рабочего тока генератора, проведят аппроксимации массива точек аналитической кривой, где в качестве математического инструмента используется метод наименьших квадратов, расчитывают коэффициенты трехмерного уравнения координат трубопровода в глобальной системе координат; определяют длины подземной части трубопровода по положению его оси в глобальной системе координат, которое сводится к расчету на компьютере длины отрезка, описываемого аналитическим уравнением. Технический результат – повышение достоверности и точности измерения длин линейной подземной части (ЛПЧ) трубопровода при определении объема продуктов, находящихся в трубопроводе. 4 ил.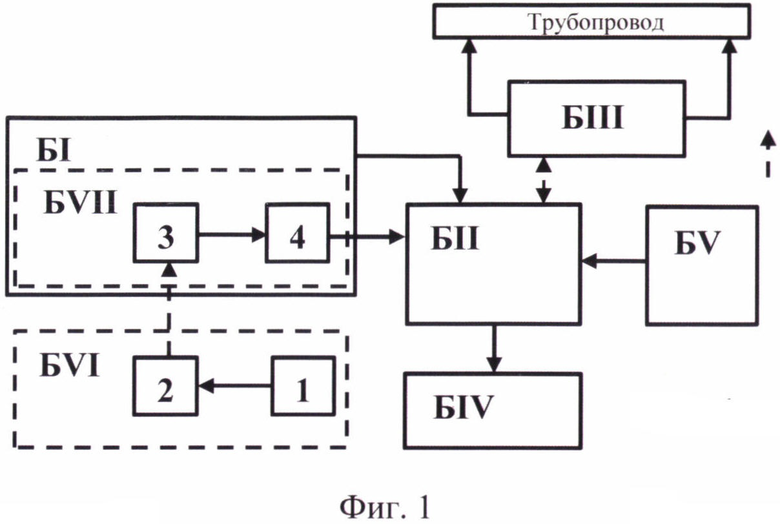
Способ измерения длины подземного трубопровода, который включает возбуждение двумя генераторами переменного тока, подключенными на концах обследуемого трубопровода и включенными навстречу друг другу в режиме противофазы, переменного магнитного поля в зоне трубопровода, один из генераторов является основным и задает базовую ФЧХ переменного тока, а второй - вспомогательный и работает в импульсном режиме, составляющем не более 20% от времени работы основного генератора, синхронизирование режимов работы генераторов и устройства по меткам времени GPS, встроенным в генераторы и блок сбора данных и управления устройства, выделение обследуемого трубопровода из числа трубопроводов, расположенных в непосредственной близости по максимальной величине тока, возбужденного в трубопроводе, а также по фазово-частотной характеристике тока, позиционирование оператора над обследуемым трубопроводом и проведение измерений над и вблизи трубопровода индукции переменного магнитного поля, создаваемой током в трубопроводе, причем одновременно с индукцией переменного магнитного поля проводят измерение трех компонентов вектора индукции постоянного магнитного поля над трубопроводом в точках, совпадающих с точками измерения переменного магнитного поля, измерение расстояния от датчиков до проекции оси трубопровода на дневную поверхность, индицирование величины и направления удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода, определение углов поворота датчиков поля вокруг горизонтальных и вертикальной осей трубопровода, получение матрицы поправок, связанных с углами поворота датчиков и их расстоянием относительно оси трубопровода, внесение поправок в матрицы компонент поля и их разностей, обработку результатов измерений и определение технических параметров подземного трубопровода, отличающийся тем, что получают массив точек, имеющих GPS координаты сантиметрового диапазона точности, проводят селекцию, где в качестве принадлежности точек к измеренному трубопроводу является критерий равенства угла фазы рабочего тока генератора, из числа оставшихся выбирают точки, имеющие максимальные значения амплитуды рабочего тока генератора и которые принадлежат оси трубопровода, проводят аппроксимацию массива точек аналитической кривой, где в качестве математического инструмента используется метод наименьших квадратов, и рассчитывают коэффициенты трехмерного уравнения координат трубопровода в глобальной системе координат; далее определяют длину подземной части трубопровода по положению его оси в глобальной системе координат, которое сводится к расчету на компьютере длины отрезка, описываемого аналитическим уравнением.
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2634755C2 |
| Способ диагностики технического состояния подземных трубопроводов | 2016 |
|
RU2630856C1 |
| СПОСОБ БЕСКОНТАКТНОГО ВЫЯВЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ХАРАКТЕРА ДЕФЕКТОВ МЕТАЛЛИЧЕСКИХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2264617C2 |
| US 20170350864 A1, 07.12.2017. | |||

