Изобретение относится к контрольно-измерительной технике и может использоваться для определения координат планово-высотного положения оси трубопровода подземного исполнения, имеющего большие глубины заложения; на участках его переходов через глубоководные водные преграды, а также для контроля пространственного положения оси трубопровода при его прокладке методом наклонно-направленного бурения.
Известен способ и устройство для диагностики технических параметров подземного трубопровода, включающий возбуждение переменного магнитного поля в зоне трубопровода, измерение над и вблизи трубопровода индукции переменного магнитного поля, создаваемой током в трубопроводе, и одновременно с индукцией переменного магнитного поля измеряют три компоненты вектора индукции постоянного магнитного поля над трубопроводом в точках, совпадающих с точками измерения переменного магнитного поля, измерение расстояния от датчиков до проекции оси трубопровода на дневную поверхность, индицирование величины и направления удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода, определение углов поворота датчиков поля вокруг горизонтальных и вертикальной осей трубопровода, получение матрицы поправок, связанных с углами поворота датчиков и их расстоянием относительно оси трубопровода, внесение поправок в матрицы компонент поля и их разностей, обработку результатов измерений и определение расположения аномалий постоянного и переменного магнитного поля, магнитные моменты и параметры нарушения изоляционного покрытия трубопровода, отличающийся тем, что используют два генератора переменного тока, - основной и вспомогательный, - подключенных на концах обследуемого участка трубопровода и включенных навстречу друг другу, содержащих GPS, причем основной генератор работает непрерывно, а вспомогательный генератор - в импульсном асинхронном режиме, составляющем не более 20% от времени работы основного генератора, в режиме работы обоих генераторов обеспечивается выделение обследуемого трубопровода из числа трубопроводов, расположенных в непосредственной близости от него, и позиционирование оператора над обследуемым трубопроводом, в режиме отключения вспомогательного генератора осуществляется диагностический контроль технических параметров подземного трубопровода (Патент РФ №2634755 ,[1]).
Известен способ определения планово-высотного положения оси подземного магистрального трубопровода, включающий пропуск внутритрубного инспектирующего прибора с навигационной системой внутри трубопровода, регистрацию и запись параметров движения, вычисление координат оси трубопровода в наземном пункте обработки, отличающийся тем, что на трассе стационарно размещают устройства для определения планово-высотного положения, выполняют их геодезическую привязку с помощью спутниковых систем GPS/ГЛОНАСС базовыми и подвижной станциями относительно реперов, устанавливают на устройствах для определения планово-высотного положения блоки связи с внутритрубным инспектирующим прибором, вводят в них координаты геодезической привязки, передают блоками связи корректирующие сигналы внутритрубному инспектирующему прибору, затем накопленные данные внутритрубного прибора и геодезические координаты деформационных марок устройств для определения планово-высотного положения передают в наземный пункт обработки (Патент РФ №2527902, [2]).
Недостатками способа являются:
Ограничение в применении. Способ не применим: на участках подземных трубопроводов, не оборудованных камерами пуска-приема внутритрубного инспекционного прибора; при больших глубинах заложения трубопровода, включая его переходы через водные преграды.
При прохождении внутритрубного инспекционного прибора в трубопроводе имеет место его проскальзывание, что может привести к потере данных контроля.
Точность определения высотной отметки оси трубопровода зависит от технических возможностей используемого устройства диагностики, применяемого для измерения глубины заложения трубопровода, что приводит к снижению точности определения планово-высотного положения оси трубопровода в глобальной системе координат.
Способ трудоемок и дорогостоящий.
Наиболее близким к предлагаемому техническому решению является способ, включающий возбуждение двумя генераторами переменного тока, подключенными на концах обследуемого трубопровода и включенными навстречу друг другу в режиме противофазы, переменного магнитного поля в зоне трубопровода, один из генераторов является основным и задает базовую ФЧХ переменного тока, а второй - вспомогательный и работает в импульсном режиме, составляющем не более 20% от времени работы основного генератора, синхронизация режимов работы генераторов и устройства по меткам времени GPS, встроенным в генераторы и блок сбора данных и управления устройства, выделение обследуемого трубопровода из числа трубопроводов, расположенных в непосредственной близости по максимальной величине тока, возбужденного в трубопроводе, а также по фазово-частотной характеристике тока, позиционирование оператора над обследуемым трубопроводом и проведение измерений над и вблизи трубопровода индукции переменного магнитного поля, создаваемой током в трубопроводе, причем одновременно с индукцией переменного магнитного поля проводят измерение трех компонентов вектора индукции постоянного магнитного поля над трубопроводом в точках, совпадающих с точками измерения переменного магнитного поля, измерение расстояния от датчиков до проекции оси трубопровода на дневную поверхность, индицирование величины и направления удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода, определение углов поворота датчиков поля вокруг горизонтальных и вертикальной осей трубопровода, получение матрицы поправок, связанных с углами поворота датчиков и их расстоянием относительно оси трубопровода, внесение поправок в матрицы компонент поля и их разностей, обработку результатов измерений и определение технических параметров подземного трубопровода, отличающийся тем, что получают массив точек, имеющих GPS координаты сантиметрового диапазона точности, проводят селекцию, где в качестве принадлежности точек к измеренному трубопроводу является критерий равенства угла фазы рабочего тока генератора, из числа оставшихся выбирают точки, имеющие максимальные значения амплитуды рабочего тока генератора и которые принадлежат оси трубопровода, проводят аппроксимацию массива точек аналитической кривой, где в качестве математического инструмента используется метод наименьших квадратов, и рассчитывают коэффициенты трехмерного уравнения координат трубопровода в глобальной системе координат; далее определяют длину подземной части трубопровода по положению его оси в глобальной системе координат, которое сводится к расчету на компьютере длины отрезка, описываемого аналитическим уравнением (Патент РФ №2662246, [3]).
Недостатком способа является высокая погрешность измерения высотной отметки (координаты) оси подземного трубопровода при определении его планово-высотного положения. Точность планово-высотного положения трубопровода подземного исполнения определяется следующими факторами: точностью позиционирования локальной системы координат диагностического прибора над проекцией оси трубопровода на дневной поверхности земли; точностью измерения расстояния между локальной системой координат диагностического прибора и осью трубопровода. Если позиционирование локальной системы координат диагностического прибора над осью трубопровода определяется точностью определения координат на местности применяемой дифференциальной навигационной спутниковой системы, то расстояние между локальной системой координат и осью трубопровода определяется точностью измерения глубины заложения применяемым диагностическим прибором. Известно, что чем больше глубина заложения трубопровода, тем выше погрешность измерения его глубины: при глубинах заложения до 3-х метров погрешность измерения находится в пределах ±2,5…3,0%; при глубинах заложения от 3-х до 10,0 м - ±5…10%; при глубинах заложения от 10 до 30,0 м - ±12…15%. Точность измерения высотных отметок оси трубопровода, в этом случае, находится в прямой зависимости от технических возможностей диагностического прибора.
Задачей изобретения является повышение точности измерения высотной отметки оси трубопровода при определении его планово-высотного положения в глобальной системе координат за счет высокоточного измерения глубины заложения оси трубопровода относительно дневной поверхности земли с использованием предлагаемого технического решения.
Способ определения координат планово-высотного положения оси подземного трубопровода включает возбуждение генератором переменного тока, позиционирование оператора над обследуемым трубопроводом и проведение измерений над и вблизи трубопровода индукции переменного магнитного поля, создаваемой током в трубопроводе, причем одновременно с индукцией переменного магнитного поля проводят измерение трех компонентов вектора индукции постоянного магнитного поля над трубопроводом в точках, совпадающих с точками измерения переменного магнитного поля, измерение расстояния от датчиков до проекции оси трубопровода на дневную поверхность, индицирование величины и направления удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода, определение углов поворота датчиков поля вокруг горизонтальных и вертикальной осей трубопровода, получение матрицы поправок, связанных с углами поворота датчиков и их расстоянием относительно оси трубопровода, внесение поправок в матрицы компонент поля и их разностей, обработку результатов измерений и определение технических параметров подземного трубопровода. Способ отличается тем, что устанавливают вешки над трубопроводом в местах измерений высотного положения его оси в глобальной системе координат, перемещают матрицу датчиков магнитного поля поперек оси трубопровода в обе стороны от вешек на расстояние не менее полуторной глубины его заложения, проводят измерение в пространстве вектора индукции переменного магнитного поля, создаваемого током генератора, получают массив точек, имеющих GPS координаты с дифференциальными поправками от базовой станции навигационной спутниковой системы, определяют в глобальной системе: координаты расположения оси трубопровода в горизонтальной плоскости в точке максимального значения индукции магнитного поля; определяют глубину заложения трубопровода относительно дневной поверхности по графику распределения вектора индукции магнитного поля, которая вычисляется как половина длины хорды, проведенной между точками, расположенными на кривой графика на уровне величины, равной половине от максимального значения индукции магнитного поля, и определяют высотную отметку оси трубопровода, вычитая из высотной отметки грунта над осью трубопровода глубину его заложения; при обработке данных о пространственном положении трубопровода проводят корректировку высотных отметок его оси с учетом данных, полученных при поперечном обследовании трубопровода.
Сущность предлагаемого технического решения поясняется следующими фигурами.
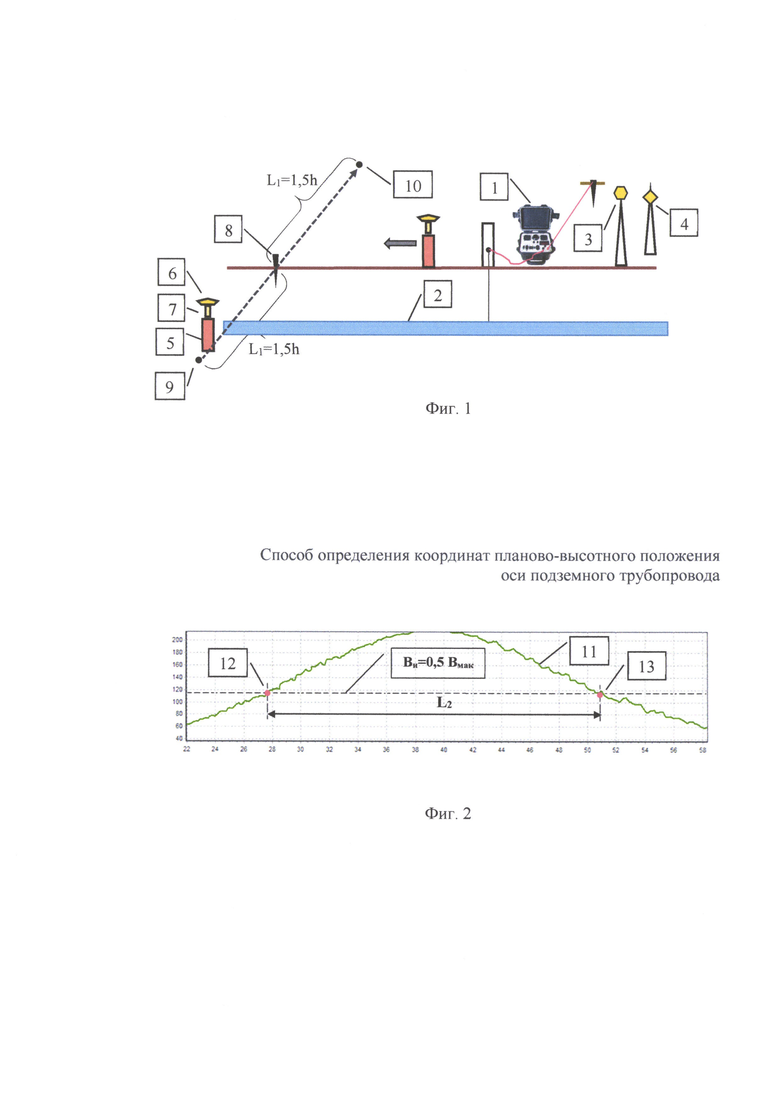
На Фиг. 1 представлена схема определения высотной отметки оси трубопровода,
где 1 - генератор устройства;
2 - трубопровод;
3 - базовая станция (БС) навигационной спутниковой системы (НСС);
4 - БС радиомодема;
5 - устройство;
6 - мобильный модуль (ММ) НСС;
7 - ММ радиомодема;
8 - вешка;
9, 10 - точки, между которыми выполняется поперечное обследование;
На фиг. 2 представлен пример вычисления глубины заложения оси трубопровода с точностью, применяемой НСС,
где 11 - график распределения модуля индукции магнитного поля;
12, 13 - точки, между которыми измеряется параметр L.
Способ реализуется следующим образом, фиг. 1: Генератор 1 устройства подключается к трубопроводу 2 и возбуждает в нем рабочий ток. Устанавливаются и запускаются в работу: БС НСС 3 и радиомодема 4. Дифференциальные поправки от БС НСС 3 передаются с помощью БС радиомодема 4 и его ММ 7 на ММ НСС 6 и далее в устройство 5. При перемещении устройства 5 над дневной поверхностью земли обеспечивается точность его позиционирования на горизонтальной плоскости с точностью НСС. После выполнения обследования участка трубопровода проводят целенаправленные высокоточные измерения глубин заложения трубопровода, для этого: устанавливают над трубопроводом вешки 8 и выполняют перемещение устройства 5 между точками 9 и 10, расположенными по обе стороны от трубопровода 2 на расстоянии L1≥1,5h - глубины его заложения в точке установки вешки 8. Формируется массив точек в форме графика 11, фиг. 2, распределения модуля индукции магнитного поля между точками 12 и 13 с шагом измерения от 0,1 метра, где каждая точка имеет GPS с дифференциальными поправками. Вычисляют длину хорды L2, между точками 12 и 13, выбранные на уровне 0,5×Вмак. Глубину заложения трубопровода вычисляют по формуле:
где Вмак - максимальное значение индукции магнитного поля, измеренной между точками 12 и 13 - соответствует положению локальной системы координат устройства 8 строго над осью трубопровода 2.
Точность определения глубины h будет соответствовать точности измерения, примененной НСС, так как длина L2 измерена дифференциальной навигационной спутниковой системой сантиметрового диапазона измерения, то точность измерения расстояния между локальной системой координат устройства 8 и осью трубопровода 2 (h) в режиме RTK будет определена по формуле:

где D - измеряемая длина базиса, равная L2, мм.
Планово-высотное положение оси трубопровода, полученное в ходе диагностики подземного трубопровода, корректируется внесением уточнений высотных отметок оси трубопровода по данным целенаправленных измерения глубины его заложения с использованием дифференциальной НСС.
Предлагаемый способ позволяет определить планово-высотное положение оси трубопровода с точностью, применяемой дифференциальной НСС, исключив из процесса определения высотной отметки оси трубопровода погрешности, связанные с техническими возможностями устройства при измерении глубины его заложения.
Источники информации
1. Патент РФ №2634755.
2. Патент РФ №2527902.
3. Патент РФ №2662246 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения пространственного положения трубопровода на участке подводного перехода | 2021 |
|
RU2786847C2 |
| Способ измерения длины подземного трубопровода | 2017 |
|
RU2662246C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2024 |
|
RU2837559C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2024 |
|
RU2824417C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2022 |
|
RU2789039C1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2634755C2 |
| Способ диагностики технических параметров подземного трубопровода | 2020 |
|
RU2735349C1 |
| СПОСОБ ДИАГНОСТИЧЕСКОГО КОНТРОЛЯ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2633018C2 |
| Способ обнаружения несанкционированных врезок в подземный трубопровод | 2020 |
|
RU2741177C1 |
| Способ обнаружения несанкционированных врезок в трубопровод и устройство для его реализации | 2020 |
|
RU2751271C1 |
Изобретение относится к контрольно-измерительной технике и может использоваться для определения координат планово-высотного положения оси трубопровода подземного исполнения, имеющего большие глубины заложения, на участках его переходов через глубоководные водные преграды, а также для контроля пространственного положения оси трубопровода при его прокладке методом наклонно-направленного бурения. Способ включает возбуждение генератором переменного тока, позиционирование оператора над обследуемым трубопроводом и проведение измерений над и вблизи трубопровода индукции переменного магнитного поля, создаваемой током в трубопроводе, измерение расстояния от датчиков до проекции оси трубопровода на дневную поверхность, определение углов поворота датчиков поля вокруг горизонтальных и вертикальной осей трубопровода, получение матрицы поправок, связанных с углами поворота датчиков и их расстоянием относительно оси трубопровода, внесение поправок в матрицы компонент поля и их разностей, обработку результатов измерений и определение технических параметров подземного трубопровода. Сущность изобретения сводится к определению планово-высотного положения оси трубопровода в глобальной системе координат с точностью, применяемой дифференциальной навигационной спутниковой системы, исключая негативное влияние технических возможностей диагностического устройства на формирование данных о высотном положении оси трубопровода. Над трубопроводом в местах измерений высотного положения оси трубопровода вешки перемещают матрицу датчиков магнитного поля поперек оси трубопровода в обе стороны от вешек на расстояние не менее полуторной глубины его заложения, проводят измерение в пространстве вектора индукции переменного магнитного поля, создаваемого током генератора, получают массив точек, имеющих GPS координаты с дифференциальными поправками, определяют в глобальной системе: координаты расположения оси трубопровода в горизонтальной плоскости в точке максимального значения индукции магнитного поля; определяют глубину заложения трубопровода относительно дневной поверхности по графику распределения вектора индукции магнитного поля, которая вычисляется как половина длины хорды, проведенной между точками, расположенными на кривой графика на уровне величины, равной половине от максимального значения индукции магнитного поля, и определяют высотную отметку оси трубопровода, вычитая из высотной отметки грунта над осью трубопровода глубину его заложения; при обработке данных о пространственном положении трубопровода проводят корректировку высотных отметок его оси с учетом данных, полученных при поперечном обследовании трубопровода. 2 ил.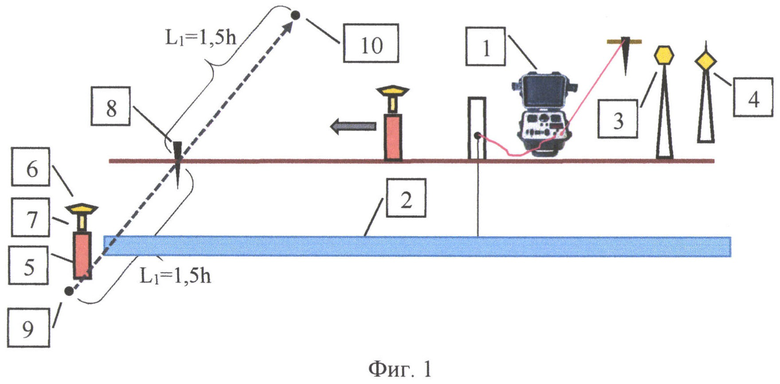
Способ определения координат планово-высотного положения оси подземного трубопровода, включающий возбуждение генератором переменного тока, позиционирование оператора над обследуемым трубопроводом и проведение измерений над и вблизи трубопровода индукции переменного магнитного поля, создаваемой током в трубопроводе, причем одновременно с индукцией переменного магнитного поля проводят измерение трех компонентов вектора индукции постоянного магнитного поля над трубопроводом в точках, совпадающих с точками измерения переменного магнитного поля, измерение расстояния от датчиков до проекции оси трубопровода на дневную поверхность, индицирование величины и направления удаления датчиков от проекции оси трубопровода, на основании чего оператор корректирует путь перемещения вдоль трубопровода, определение углов поворота датчиков поля вокруг горизонтальных и вертикальной осей трубопровода, получение матрицы поправок, связанных с углами поворота датчиков и их расстоянием относительно оси трубопровода, внесение поправок в матрицы компонент поля и их разностей, обработку результатов измерений и определение технических параметров подземного трубопровода, отличающийся тем, что устанавливают вешки над трубопроводом в местах измерений высотного положения его оси в глобальной системе координат, перемещают матрицу датчиков магнитного поля поперек оси трубопровода в обе стороны от вешек на расстояние не менее полуторной глубины его заложения, проводят измерение в пространстве вектора индукции переменного магнитного поля, создаваемого током генератора, получают массив точек, имеющих GPS координаты с дифференциальными поправками от базовой станции навигационной спутниковой системы, определяют в глобальной системе: координаты расположения оси трубопровода в горизонтальной плоскости в точке максимального значения индукции магнитного поля; определяют глубину заложения трубопровода относительно дневной поверхности по графику распределения вектора индукции магнитного поля, которая вычисляется как половина длины хорды, проведенной между точками, расположенными на кривой графика на уровне величины, равной половине от максимального значения индукции магнитного поля, и определяют высотную отметку оси трубопровода, вычитая из высотной отметки грунта над осью трубопровода глубину его заложения; при обработке данных о пространственном положении трубопровода проводят корректировку высотных отметок его оси с учетом данных, полученных при поперечном обследовании трубопровода.
| Способ измерения длины подземного трубопровода | 2017 |
|
RU2662246C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛАНОВО-ВЫСОТНОГО ПОЛОЖЕНИЯ ПОДЗЕМНОГО МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 2012 |
|
RU2527902C2 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2634755C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И НЕСАНКЦИОНИРОВАННЫХ ВРЕЗОК В ТРУБОПРОВОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572907C2 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2009 |
|
RU2453760C2 |

